
Location-Based Game for Thought-Provoking Evacuation Training


Abstract
:
1. Introduction
2. Target Evacuation Training
- (1)
- Response Phase
- (2)
- Recovery Phase
- (3)
- Mitigation Phase
- (4)
- Preparedness Phase
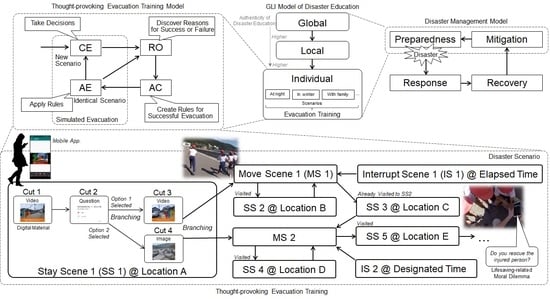
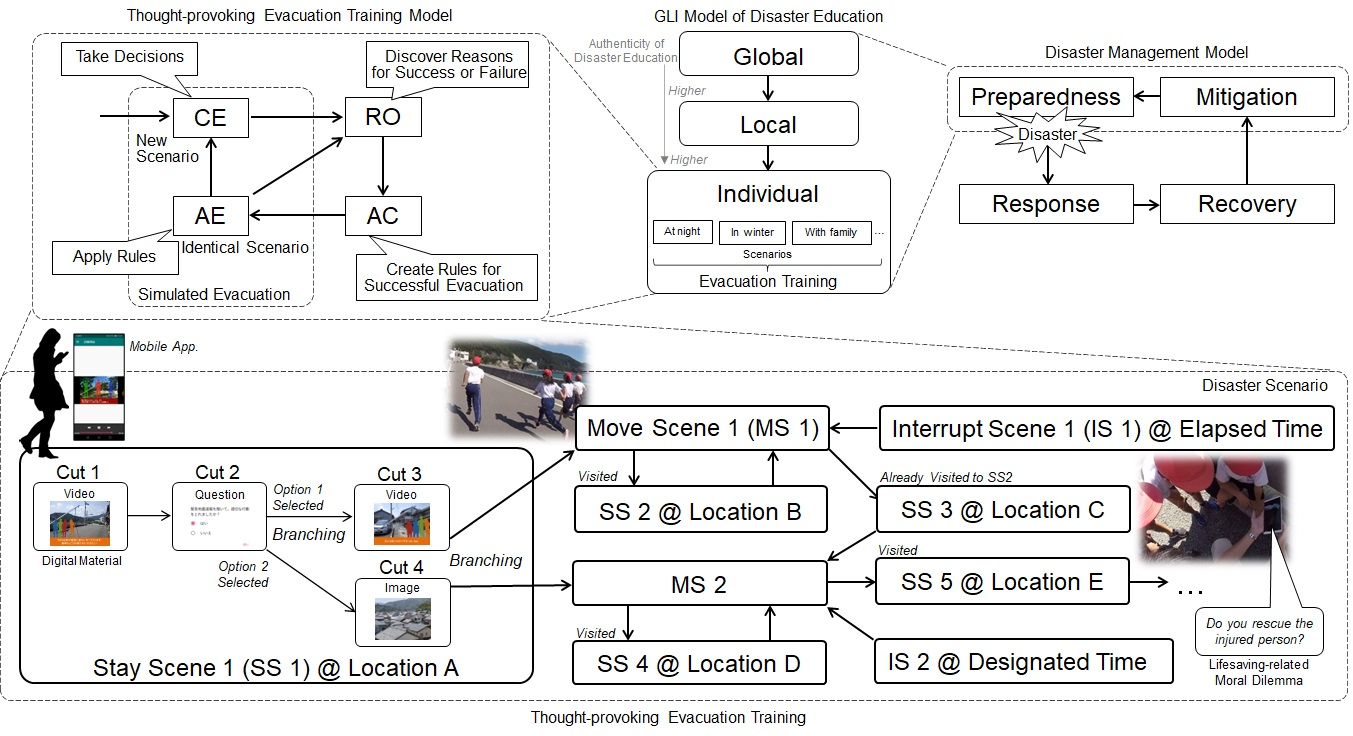
2.1. Evacuation Training in Disaster Education
2.1.1. Global Layer
2.1.2. Local Layer
2.1.3. Individual Layer
2.2. Evacuation Process
2.2.1. Recognition Phase
2.2.2. Protection Phase
2.2.3. Decision Phase
2.2.4. Evacuation Phase
2.3. Realistic Evacuation Training
2.3.1. Situational Realism
2.3.2. Audiovisual Realism
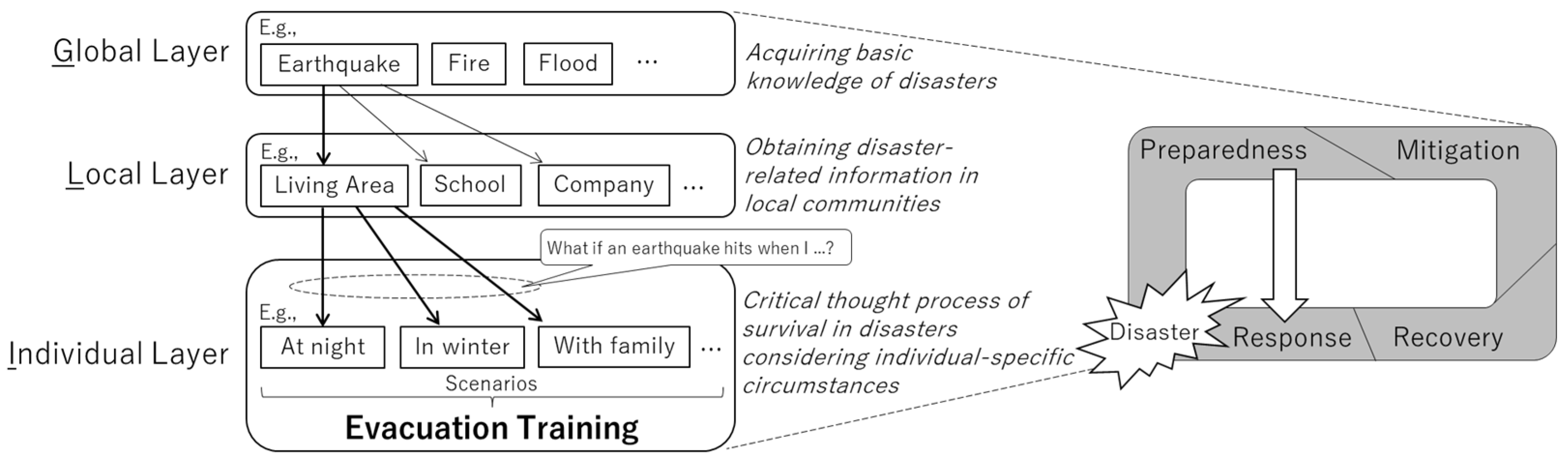
2.4. Evacuation-Training Model Based on Experiential Learning
2.4.1. CE Stage
2.4.2. RO Stage
2.4.3. AC Stage
2.4.4. AE Stage
3. Game Development
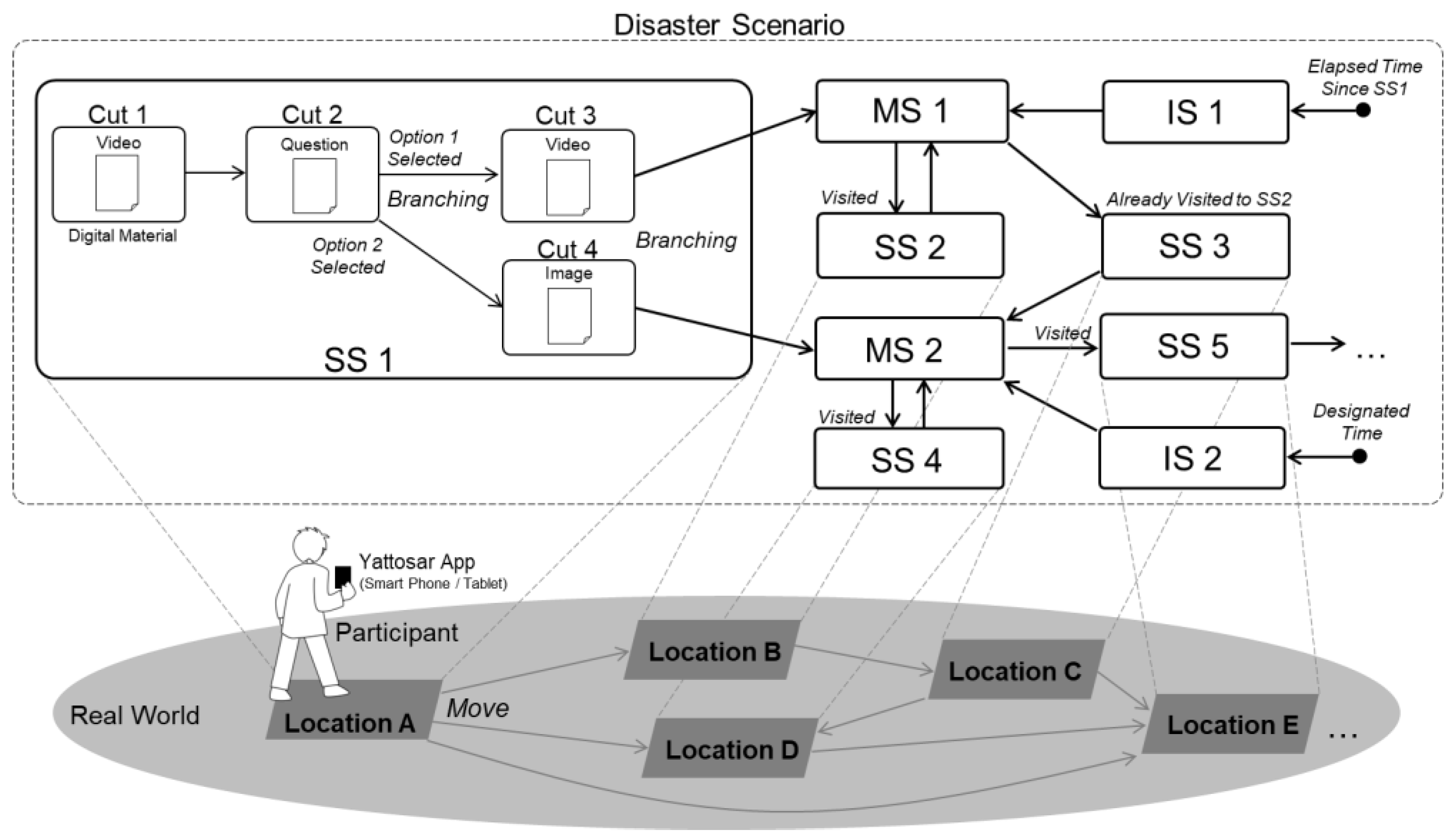
3.1. Scenario
3.1.1. Scenes and Cuts
3.1.2. Branching Conditions
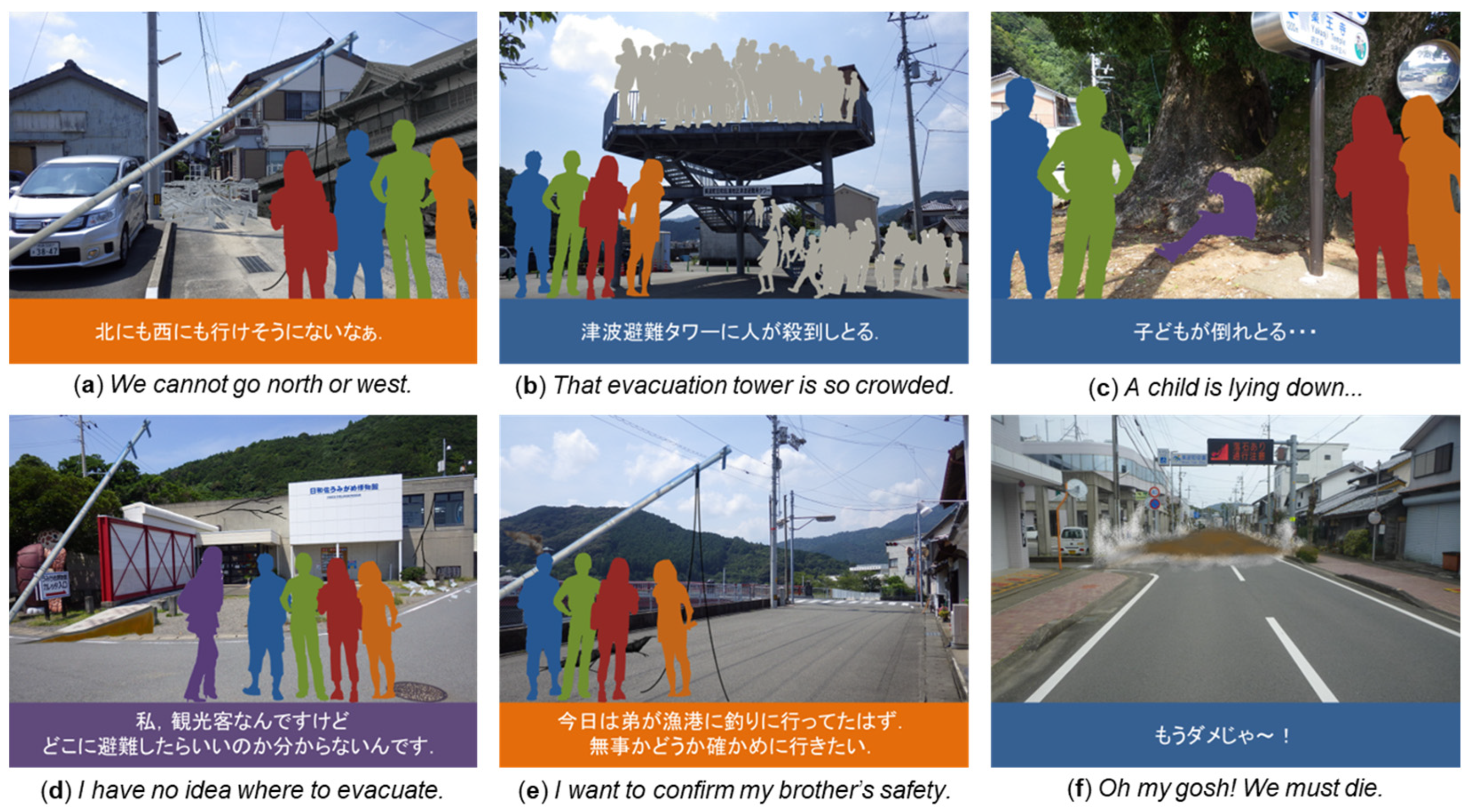
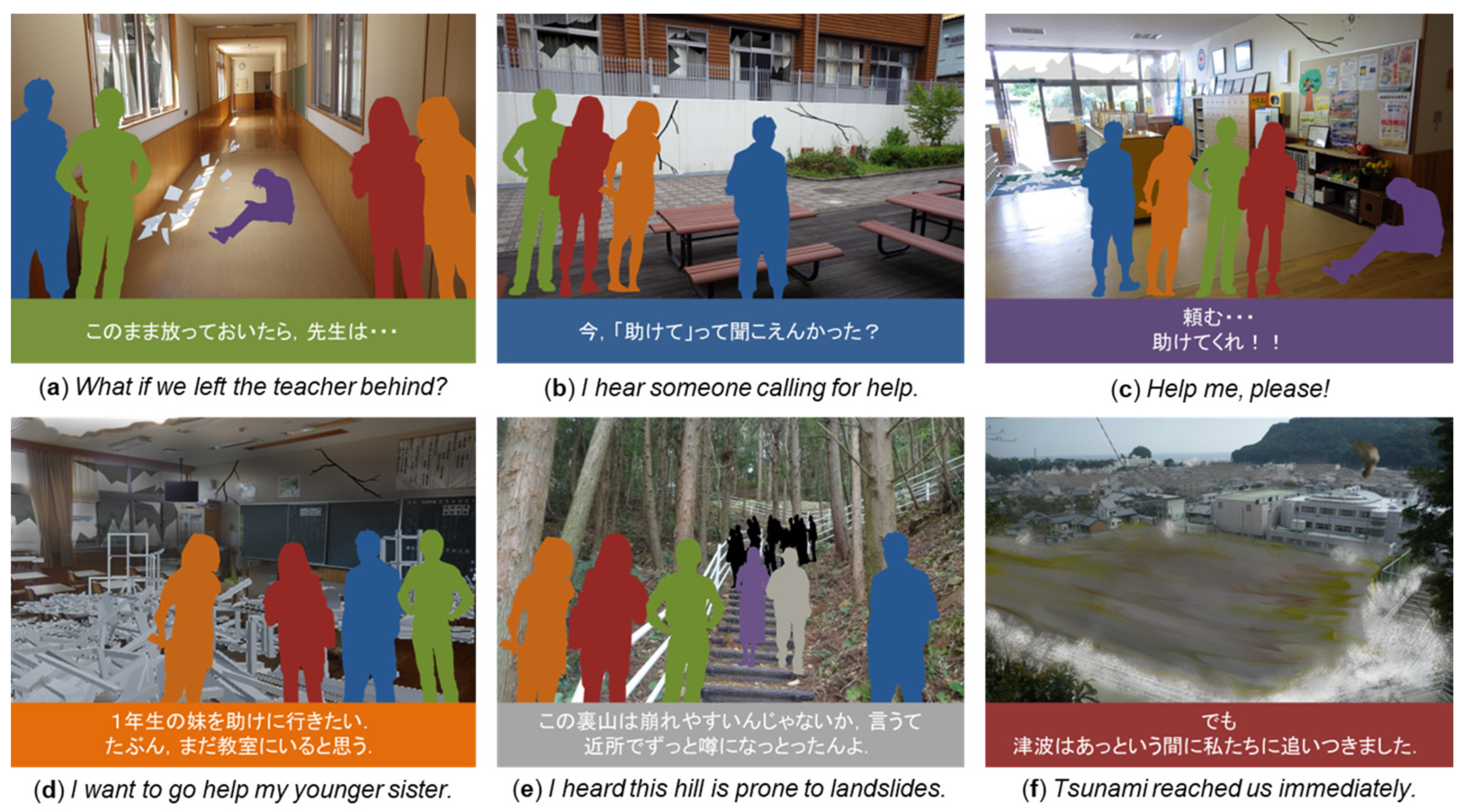
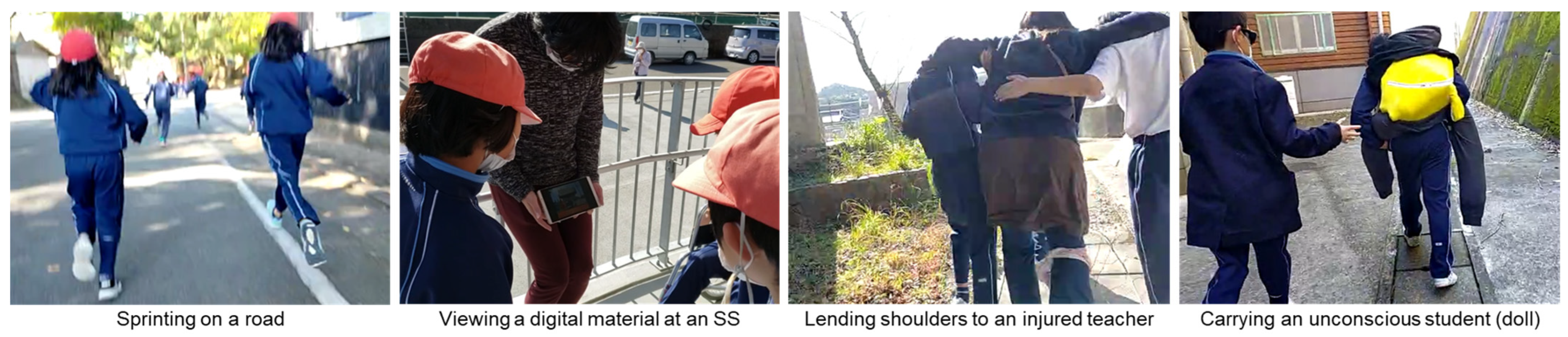
3.2. Digital Materials
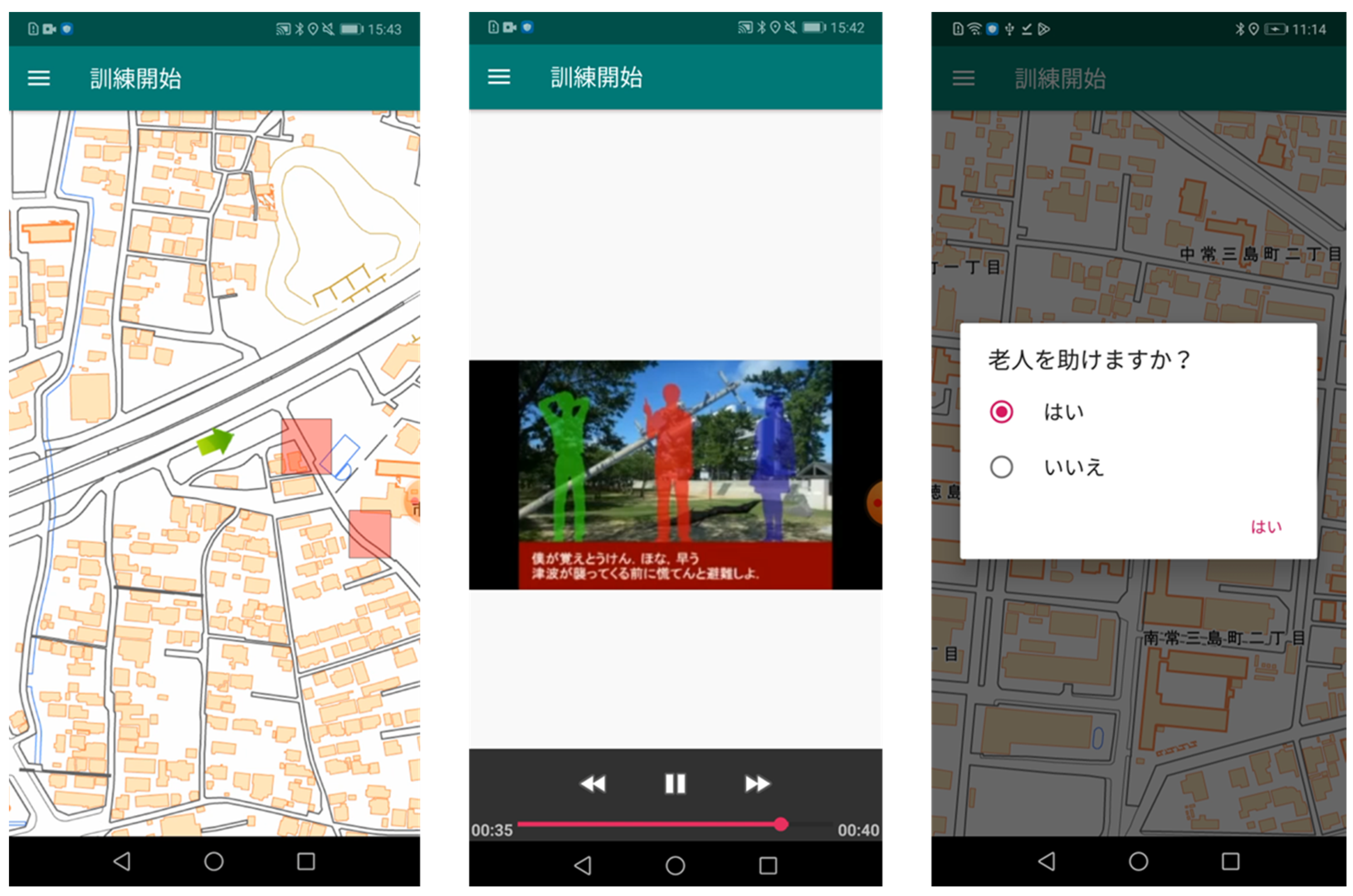
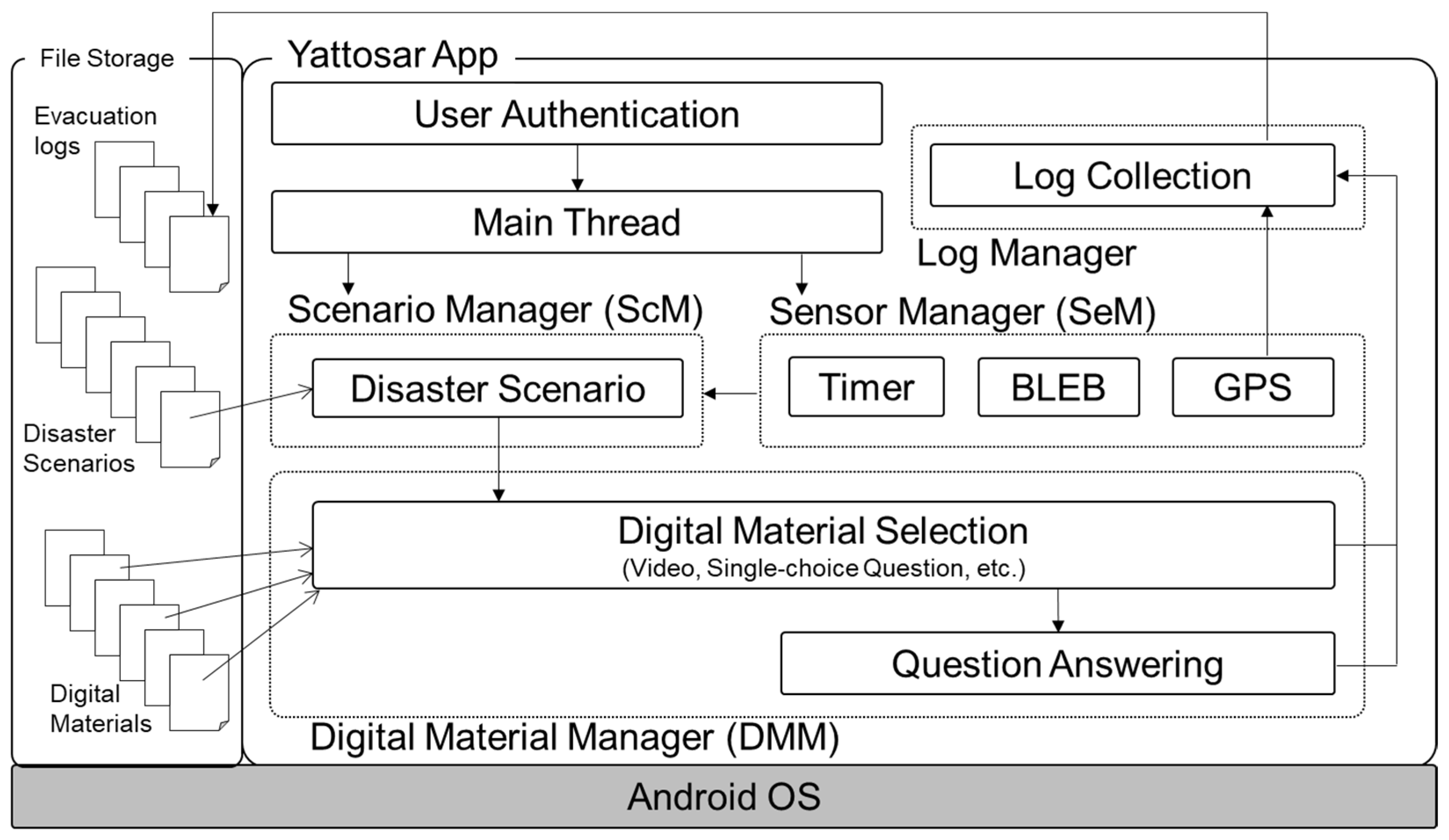
3.3. Mobile Application
3.4. Reflection-Support System
4. Practice and Evaluation
4.1. Settings
4.1.1. Target Area
4.1.2. Participants
4.1.3. Scenarios
4.2. Results
4.2.1. CE Stage
- CE-A-1.
- Against the situation of “blocked evacuation route”, in 12 s, they decided to take a route leading to another shelter.
- CE-A-2.
- Against the situation of “whether to rescue”, in 11 s, they decided to rescue an unconscious child; they worked together to carry a heavy doll.
- CE-A-3.
- They reached the shelter within the time limit.
- CE-B-1.
- Against the situation of “unavailable shelter”, in 11 s, they decided to evacuate to another shelter.
- CE-B-2.
- Against the situation of “whether to assist”, they immediately decided to lead a confused tourist to the shelter.
- CE-B-3.
- Against the situation of “whether to rescue”, they immediately decided to rescue an unconscious child; they worked together to carry a heavy doll.
- CE-B-4.
- They reached the shelter within the time limit.
- CE-C-1.
- Against the situation of “crowded shelter”, in 8 s, they decided to evacuate to another shelter.
- CE-C-2.
- Against the situation of “blocked evacuation route”, in 5 s, they decided to avoid narrow routes through a dense wooden-house section and evacuate to a longer but wider route.
- CE-C-3.
- Against the situation of “unavailable shelter”, they immediately decided to evacuate to another shelter.
- CE-C-4.
- They did not reach the shelter within the time limit.
- CE-D-1.
- Against the situation of “whether to confirm”, they immediately decided not to visit a playground (harbor) that a young brother often visits after school.
- CE-D-2.
- Against the situation of “crowded shelter”, in 7 s, they decided to evacuate to another shelter.
- CE-D-3.
- They reached the shelter within the time limit.
4.2.2. RO Stage on Day 1
4.2.3. AC Stage
4.2.4. AE Stage
- AE-A-1.
- Against the situation of “whether to confirm”, they immediately decided not to visit a classroom where a young sister is possibly staying.
- AE-A-2.
- Against the situation of “whether to assist”, in 56 s, they decided to help an injured teacher and put the teacher in a wheelchair found nearby. They got out of the school building while pushing the wheelchair, but could not push it smoothly because of the muddy schoolyard. After approximately 40 s of discussion, while moving slowly, they decided to leave the wheelchair there and lend their shoulders to the teacher to move.
- AE-A-3.
- When reaching the stairway to the shelter, they noticed that they had difficulty carrying the teacher. In 25 s, they decided to leave the teacher there, expecting him to move. (Note, we did not set any SS for this situation).
- AE-A-4.
- Against the situation of “unreliable shelter” presented when reaching the nearest shelter, in 44 s, they decided to stay there. That is, they reached the shelter within the time limit.
- AE-B-1.
- Against the situation of “whether to rescue”, they immediately decided to rescue an unconscious teacher; they worked together to carry a heavy doll.
- AE-B-2.
- Against the situation of “whether to assist”, in 22 s, they decided to assist an injured teacher and put the teacher in a wheelchair. They divided the roles into carrying the unconscious teacher (doll) and the injured teacher (real teacher). However, they suggested that carrying a wheelchair to the shelter would be difficult, so a member proposed using an elevator to evacuate to the top floor of the school building. In response, the teacher said, “The use of an elevator is dangerous when disasters and tsunamis attack the top floor”. Consequently, they abandoned using the wheelchair and lent their shoulders to the teacher to evacuate to the shelter.
- AE-B-3.
- Against the situation of “unreliable shelter”, a member proposed leaving the teacher there. Simultaneously, another member noticed that another group was heading to a shelter outside the school. In 41 s, they decided to evacuate to another shelter together with the teacher and started descending the hill.
- AE-B-4.
- When going down to the schoolyard, they found a wheelchair that Group A left and put the injured teacher in it. (Note, this situation occurred by chance).
- AE-B-5.
- Against the situation of “crowded shelter”, they dithered over whether to re-evacuate to the first-reached shelter (hill). In 25 s, they decided to evacuate to another shelter on the opposite side of the coast.
- AE-B-6.
- Against the situation of “whether to confirm”, in 21 s, they decided not to visit a mother’s workplace believing that she has already evacuated.
- AE-B-7.
- They did not reach the shelter within the time limit.
- AE-C-1.
- Against the situation of “whether to assist”, in 16 s, they decided to assist an injured teacher and lend their shoulders to the teacher to evacuate to the shelter.
- AE-C-2.
- Against the situation of “unreliable shelter”, in 40 s, they suggested a few shelters and decided to evacuate to another shelter together with the teacher.
- AE-C-3.
- Against the situation of “crowded shelter”, in 21 s, they suggested a few shelters again and decided to evacuate to another shelter.
- AE-C-4.
- Against the situation of “whether to confirm”, they immediately decided not to visit a mother’s workplace.
- AE-C-5.
- They did not reach the shelter within the time limit.
- AE-D-1.
- Against the situation of “whether to rescue”, they immediately decided to go to the possible place to rescue an immobile student. After 2 min, they found and carried the student (the heavy doll).
- AE-D-2.
- Against the situation of “unavailable shelter”, in 20 s, they decided to stay there. That is, they reached the shelter within the time limit.
4.2.5. RO Stage on Day 2
4.2.6. Questionnaire Results
4.3. Discussion
4.3.1. CE Stage
4.3.2. RO Stage on Day 1
4.3.3. AC Stage
4.3.4. AE Stage
4.3.5. RO Stage on Day 2
4.4. Limitations
4.5. New Agenda
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Centre for Research on the Epidemiology of Disasters (CRED). Emergency Events Database (EM-DAT). Available online: https://www.emdat.be/ (accessed on 23 March 2023).
- National Consortium for the Study of Terrorism and Responses to Terrorism. Global Terrorism Database (GTD). Available online: https://www.start.umd.edu/research-projects/global-terrorism-database-gtd (accessed on 23 March 2023).
- Li, N.; Sun, N.; Cao, C.; Hou, S.; Gong, Y. Review on visualization technology in simulation training system for major natural disasters. Nat. Hazards 2022, 112, 1851–1882. [Google Scholar] [CrossRef] [PubMed]
- Gagliardi, E.; Bernardini, G.; Quagliarini, E.; Schumacher, M.; Calvaresi, D. Characterization and future perspectives of virtual reality evacuation drills for safe built environments: A systematic literature review. Saf. Sci. 2023, 163, 106141. [Google Scholar] [CrossRef]
- Feng, Z.; González, V.A.; Spearpoint, M.; Thomas, J.; Trotter, M.; Cabrera-Guerrero, G.; Paes, D. A sequence analysis of behaviors in immersive virtual reality for indoor earthquake and post-earthquake evacuation. Int. J. Disaster Risk Reduc. 2022, 75, 102978. [Google Scholar] [CrossRef]
- Hatakeyama, H.; Nagai, M.; Murota, M. A flexible scenario-based mobile learning system for disaster evacuation. In Proceedings of the HCI International 2016—Posters’ Extended Abstracts. HCI 2016. Communications in Computer and Information Science, Toronto, ON, Canada, 20–22 July 2016; Stephanidis, C., Ed.; Springer: Cham, Switzerland, 2016; Volume 618, pp. 360–364. [Google Scholar] [CrossRef]
- Leelawat, N.; Suppasri, A.; Latcharote, P.; Abe, Y.; Sugiyasu, K.; Imamura, F. Tsunami evacuation experiment using a mobile application: A design science approach. Int. J. Disaster Risk Reduc. 2018, 29, 63–72. [Google Scholar] [CrossRef]
- Yamori, K.; Sugiyama, T. Development and social implementation of smartphone app Nige-tore for improving tsunami evacuation drills: Synergistic effects between commitment and contingency. Int. J. Disaster Risk Sci. 2020, 11, 751–761. [Google Scholar] [CrossRef]
- Mitsuhara, H.; Shishibori, M. Tsunami evacuation drill system focusing on mobile devices. Int. J. Interact. Mob. Technol. 2020, 16, 4–20. [Google Scholar] [CrossRef]
- Lovreglio, R.; Ngassa, D.; Rahouti, A.; Paes, D.; Feng, Z.; Shipman, A. Prototyping and testing a virtual reality counterterrorism serious game for active shooting. Int. J. Disaster Risk Reduc. 2022, 82, 103283. [Google Scholar] [CrossRef]
- Catal, C.; Akbulut, A.; Tunali, B.; Ulug, E.; Ozturk, E. Evaluation of augmented reality technology for the design of an evacuation training game. Virtual Real. 2020, 24, 359–368. [Google Scholar] [CrossRef] [Green Version]
- Radianti, J.; Lazreg, M.B.; Granmo, O.-C. Fire simulation-based adaptation of SmartRescue App for serious game: Design, setup and user experience. Eng. Appl. Artif. Intell. 2015, 46, 312–325. [Google Scholar] [CrossRef]
- Ramchurn, S.D.; Wu, F.; Jiang, W.; Fischer, J.E.; Reece, S.; Roberts, S.; Rodden, T.; Greenhalgh, C.; Jennings, N.R. Human–agent collaboration for disaster response. Auton. Agent. Multi-Agent Syst. 2016, 30, 82–111. [Google Scholar] [CrossRef] [Green Version]
- Meesters, K.; van de Walle, B.A. Disaster in My Backyard: A Serious Game Introduction to Disaster Information Management. In Proceedings of the 10th International Conference on Information Systems for Crisis Response and Management, Karlsruhe, Germany, 12–15 May 2013. [Google Scholar]
- Kanangkaew, S.; Jokkaw, N.; Tongthong, T. A real-time fire evacuation system based on the integration of building information modeling and augmented reality. J. Build. Eng. 2023, 67, 105883. [Google Scholar] [CrossRef]
- Gan, Q.; Liu, Z.; Liu, T.; Chai, Y. An indoor evacuation guidance system with an AR virtual agent. Procedia Comput. Sci. 2022, 213, 636–642. [Google Scholar] [CrossRef]
- Sánchez, J.M.; Carrera, Á.; Iglesias, C.Á.; Serrano, E. A participatory agent-based simulation for indoor evacuation supported by Google Glass. Sensors 2016, 16, 1360. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sharma, S.; Stigall, J.; Bodempudi, S.T. Situational awareness-based augmented reality instructional (ARI) module for building evacuation. In Proceedings of the 2020 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops, Atlanta, GA, USA, 22 March 2020; pp. 70–78. [Google Scholar] [CrossRef]
- Wächter, T.; Rexilius, J.; König, M. Interactive evacuation in intelligent buildings assisted by mixed reality. J. Smart Cities Soc. 2022, 1, 179–194. [Google Scholar] [CrossRef]
- Lochhead, I.; Hedley, N. Mixed reality emergency management: Bringing virtual evacuation simulations into real-world built environments. Int. J. Digit. Earth. 2019, 12, 190–208. [Google Scholar] [CrossRef]
- Mitsuhara, H.; Sumikawa, T.; Miyashita, J.; Iwaka, K.; Kozuki, Y. Game-based evacuation drill using real world edutainment. Interact. Technol. Smart Educ. 2013, 10, 194–210. [Google Scholar] [CrossRef]
- Mitsuhara, H.; Inoue, T.; Yamaguchi, K.; Takechi, Y.; Morimoto, M.; Iwaka, K.; Kozuki, Y.; Shishibori, M. Web-based system for designing game-based evacuation drills. Procedia Comput. Sci. 2015, 72, 277–284. [Google Scholar] [CrossRef] [Green Version]
- Mitsuhara, H.; Tanimura, C.; Nemoto, J.; Shishibori, M. Why don’t you evacuate speedily? Augmented reality-based evacuee visualisation in ICT-based evacuation drill. In Proceedings of the 2018 IEEE International Conference on Teaching, Assessment, and Learning for Engineering, Wollongong, NSW, Australia, 4 December 2018. [Google Scholar] [CrossRef]
- Mitsuhara, H.; Irie, H.; Shishibori, M. Evacuation drill using augmented reality and a handheld head-mounted display. In Proceedings of the 26th International Conference on Computers in Education, Manila, Philippines, 26 November 2018; pp. 7–16. [Google Scholar]
- Mitsuhara, H.; Tanimura, C.; Nemoto, J.; Shishibori, M. Expressing disaster situations for evacuation training using markerless augmented reality. Procedia Comput. Sci. 2021, 192, 2105–2114. [Google Scholar] [CrossRef]
- NGA (National Governors’ Association). Comprehensive Emergency Management: A Governor’s Guide; Center for Policy Research: Washington, DC, USA, 1979. [Google Scholar]
- Lorusso, P.; De Iuliis, M.; Marasco, S.; Domaneschi, M.; Cimellaro, G.P.; Villa, V. Fire emergency evacuation from a school building using an evolutionary virtual reality platform. Buildings 2022, 12, 223. [Google Scholar] [CrossRef]
- Kolb, D. Experiential Learning: Experience as the Source of Learning and Development; Prentice Hall, Inc.: Englewood Cliffs, NJ, USA, 1984. [Google Scholar]
- Feng, Z.; González, V.A.; Mutch, C.; Amor, R.; Cabrera-Guerrero, G. Exploring spiral narratives with immediate feedback in immersive virtual reality serious games for earthquake emergency training. Multimedia Tools Appl. 2023, 82, 125–147. [Google Scholar] [CrossRef]
- Schon, D. Educating the Reflective Practitioner; Jossy Bass: San Francisco, CA, USA, 1983. [Google Scholar]
- Yun, N.Y.; Hamada, M. Evacuation behavior and fatality rate during the 2011 Tohoku-Oki earthquake and tsunami. Earthquake Spectra 2015, 31, 1237–1265. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group (No. of Members) | CE (Time) | AE (Time) |
|---|---|---|
| A (N = 6) | Success (1002 s) | Success (1069 s) |
| B (N = 7) | Success (932 s) | Failure |
| C (N = 6) | Failure | Failure |
| D (N = 6) | Success (870 s) | Success (866 s) |
| Group | Situation | Interaction |
|---|---|---|
| A | CE-A-3 | R 1: We climbed the fence of the shelter because we could not find the shelter entrance. T 2 (while viewing the recorded video): You took time to climb the fence. What do you think will happen if you do this in a real evacuation? R: Waste of time. We may die. T: You will be much upset if you do not know the shelter entrance. I believe that you got a good experience in the training. |
| Do’s | T: What did you get via your reflection? Based on it, what do you think you should do in a real evacuation? 3 R: We should know about shelters, take decisions quickly, move fast, carry the injured softly, and not choose the wrong routes. | |
| B | CE-B-2 CE-B-3 | R: We found a tourist who got lost. We guided the tourists to the shelter but left her on the way. Then, we carried a child to the shelter but did not know where the entrance is. As a result, we had to rush to the top floor of the shelter. T: You encountered many events. Did you succeed in the evacuation? R: Yes, we did. T: If you took decisions faster or slowly, the consequences would have changed. |
| Do’s | R: We should have paid more attention to the tourists. We will cooperatively carry the injured. T: It is a difficult decision to carry the injured. You want to carry the injured, but you will dither in a real situation. Do you have any idea about how we should deal with a situation like this? R: Umm… I do not want to die. | |
| C | CE-C-2 CE-C-3 | T: You encountered fire. Then, you returned to the starting location and took another route. What do you think about the decision? R: The route to the shelter was also on fire. Maybe, we should have chosen another route directly from the location of the first fire. T (while viewing their evacuation route): You moved a lot. How fast did you move? R (while viewing the recorded video): We should have run faster. |
| Do’s | R: We prioritize our lives, but depending on the circumstances, we want to help persons in need. We should look around during the evacuation. T: I guess that you want to help persons within your reach, so you thought that you should look around. | |
| D | CE-D-2 | R: We went to the nearest shelter, but it was full. Then, we decided to evacuate to the hill behind the school. T (accompanied by this group): You debated whether to evacuate to the hill or a recently built shelter, did not you? What happened to anything else? R: A member had sprained his leg. We moved slowly for him but should have moved more slowly. |
| Do’s | R: We want to attend to the injured we found. We should quickly decide whether to evacuate and keep silent during evacuation. T: I guess that you recalled that silent and calm evacuation is required as instructed in the past training. |
| Group | ID 1 | Rule 2 |
|---|---|---|
| A | A3 | I calm myself down, run, and do my best. |
| A4 | I cooperate with everyone together. | |
| A6 | I protect myself quickly. Drop, cover, and hold on. | |
| B | B2 | I hide under the table quickly when an earthquake happens. |
| B4 | I stay away from the stuff that may fall down. | |
| B5 | I hide under the table quickly. | |
| B6 | I never get upset when an earthquake. | |
| C | C1 | I evacuate speedily. |
| C2 | If an earthquake happens when I am at school, I move to a wide area and protect my head. After the shake stop, I evacuate to the hill behind the school buildings. | |
| C3 | When outside, I evacuate to a place where nothing falls. | |
| D | D1 | I call out the injured. |
| D2 | When playing outside, I start to evacuate calmly after the shakes stop. | |
| D3 | I evacuate speedily and quietly. | |
| D4 | I start to evacuate immediately after the shakes stop. | |
| D5 | I avoid dangers such as falling objects and evacuate via the shortest route. |
| Group | Situation | Interaction |
|---|---|---|
| A | AE-A-2 AE-A-3 | R: We found an injured teacher at the entrance and assisted the teacher to evacuate. T: How did you assist the teacher? R: We could not push the wheelchair in the schoolyard. As a result, we gave up pushing it and instead gave him an umbrella to use as a walking stick. T: What happened then? R: We left him there and kept evacuating because we had no time. |
| Do’s | R: We should know shelters in advance, decide quickly, protect our heads, and evacuate speedily. | |
| B | AE-B-2 AE-B-3 AE-B-5 | R: While carrying the doll, we assisted another injured teacher. T: How did you assist? R: Two students lent their shoulders to the teacher. Then, we moved to the hill behind, but someone said that a landslide may hit the hill. Therefore, we decided to go to a town hall designated as a shelter, but it was crowded, and we had to change our destination. T: Where did you try to go? R: Another shelter other than the evacuation tower. However, the tsunami reached us on the way. |
| Do’s | R: We should know more about the area and cooperate more quickly without getting upset. | |
| C | AE-C-4 Tsunami | T: What decision did you take when asked whether to confirm a mother’s safety? R: We kept our evacuation because we had been taught that individuals protect life by him/herself. T: After that, you saw that a tsunami is coming. Then, you started to sprint very fast. R: We evacuated at almost walking speed at first, but we should have evacuated speedily from the beginning. |
| Do’s | R: We should cooperate, decide calmly, and evacuate speedily. | |
| D | AE-D-1 AE-D-2 | T: You went to rescue a student. Was the student heavy? R: So heavy. T: Did you carry it only by yourself? R: Yes! T: This group decided to stay on the hill and completed evacuation in approximately 15 min. What do you think was good about your evacuation? R: Umm… |
| Do’s | R: We should obtain knowledge about the area in advance, protect ourselves, decide quickly, and cooperate, for example, help the person who is helping others. |
| Question | Group (No. of Respondents 1) | Median (Mean Rank) |
|---|---|---|
| Do you think that you evacuated more successfully than on day 1? | A (N = 6) | 4 (4.0) |
| B (N = 7) | 3 (13.42) | |
| C (N = 4) | 4 (6.75) | |
| D (N = 6) | 4 (4.33) | |
| Do you want to participate in this evacuation training again? | A (N = 6) | 4.5 (9.66) |
| B (N = 7) | 5 (7.28) | |
| C (N = 4) | 4 (10.0) | |
| D (N = 6) | 5 (5.0) |
| Group | ID | Reply 1 | Description 2 |
|---|---|---|---|
| A | A1 | 4 | I completed the evacuation slightly faster and cooperated. |
| A2 | 3 | N/A | |
| A3 | 4 | I recalled day 1 and had many thoughts. | |
| A4 | 5 | I cooperated better than the previous. | |
| A5 | 5 | I behaved calmly and quickly. | |
| A6 | 4 | I cooperated better and reached the shelter faster than on day 1. | |
| B | B1 | 4 | I protected my head when an earthquake happened. |
| B2 | 3 | N/A | |
| B3 | 4 | I took decisions more quickly than on day 1. | |
| B4 | 2 | I could not reach the shelter by the time limit. | |
| B5 | 3 | N/A | |
| B6 | 3 | N/A | |
| B7 | 2 | I failed in the evacuation, but everything else was well done. | |
| C | C1 | 4 | I sprinted on day 2. |
| C2 | 4 | N/A | |
| C3 | 4 | I behaved calmly. | |
| C4 | 2 | The tsunami reached me. | |
| D | D1 | 4 | I encouraged a friend who was carrying a person during the evacuation. |
| D2 | 4 | I made decisions calmly. | |
| D3 | 4 | I cooperated quickly. | |
| D4 | 3 | N/A | |
| D5 | 4 | I quickly decided and evacuated. | |
| D6 | 4 | I evacuated while watching out for objects that may fall down. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mitsuhara, H.; Tanimura, C.; Nemoto, J.; Shishibori, M. Location-Based Game for Thought-Provoking Evacuation Training. Multimodal Technol. Interact. 2023, 7, 59. https://doi.org/10.3390/mti7060059
Mitsuhara H, Tanimura C, Nemoto J, Shishibori M. Location-Based Game for Thought-Provoking Evacuation Training. Multimodal Technologies and Interaction. 2023; 7(6):59. https://doi.org/10.3390/mti7060059
Chicago/Turabian StyleMitsuhara, Hiroyuki, Chie Tanimura, Junko Nemoto, and Masami Shishibori. 2023. "Location-Based Game for Thought-Provoking Evacuation Training" Multimodal Technologies and Interaction 7, no. 6: 59. https://doi.org/10.3390/mti7060059