
Incorporating Human Preferences in Decision Making for Dynamic Multi-Objective Optimization in Model Predictive Control


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Formulate a new adaptation of a well-known deterministic method to sample an approximation of the Pareto front, which is more apt for the dynamic multi-objective optimization case where objectives may correlate sometimes,
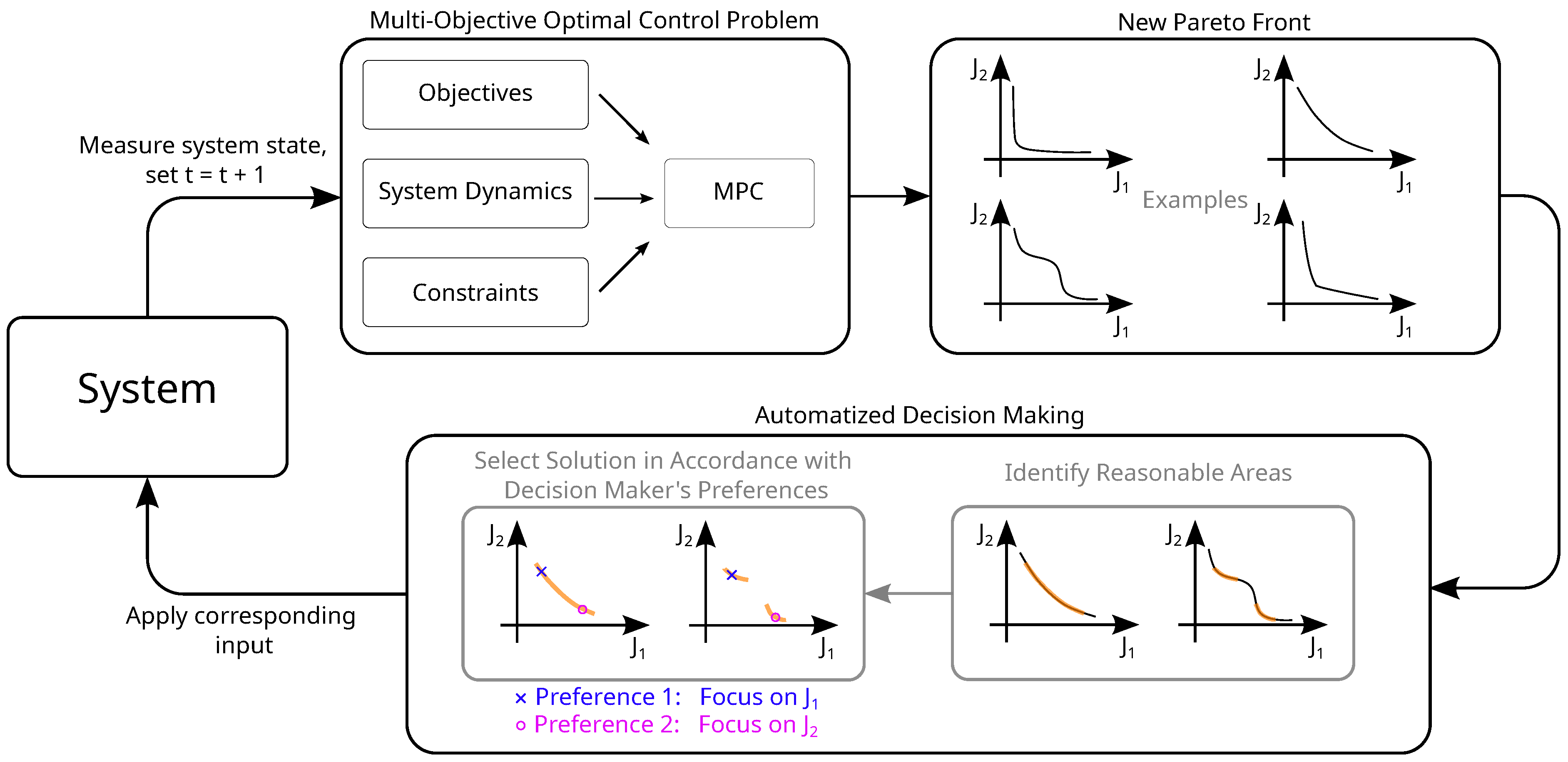
- Present a new two-step approach for the automated decision making process, which is again designed for the use in dynamic multi-objective optimization and
- ∘
- In its first step uses a definition of a knee region which depends less on accurate extreme points;
- ∘
- In its second step uses a geometric interpretation of a hyperplane representing the preferences of a decision maker formulated a priori; and
- Show in a simulation study of an energy management system that the approach leads to a proper representation of the preferences not only in the limited time horizon of the multi-objective optimization problem but also in the long-term costs.
Notation
2. Related Work
2.1. Problem Formulation
2.2. Determining the Pareto Front
2.3. Decision Making (Choosing a Solution)
- Select a final solution by themselves or only identify a subset of solutions which are then presented to the decision maker (DM);
- Aim at selecting a good compromise in general (i.e., a compromise solution) or rank the solutions in dependence of the Pareto front’s shape (i.e., try to identify a knee point);
- Do or do not incorporate preferences of a decision maker.
3. Proposed Automatized Decision Making Approach
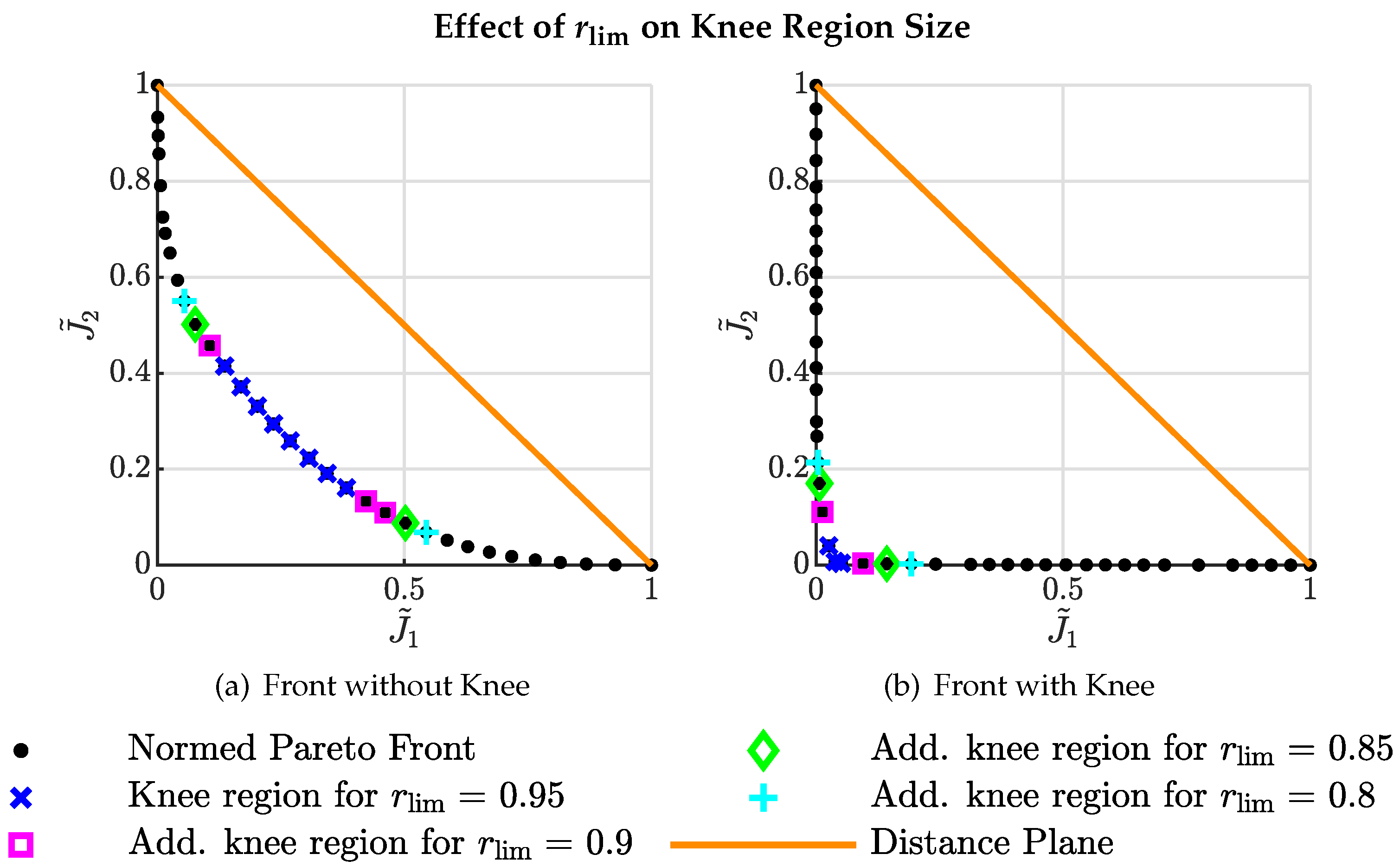
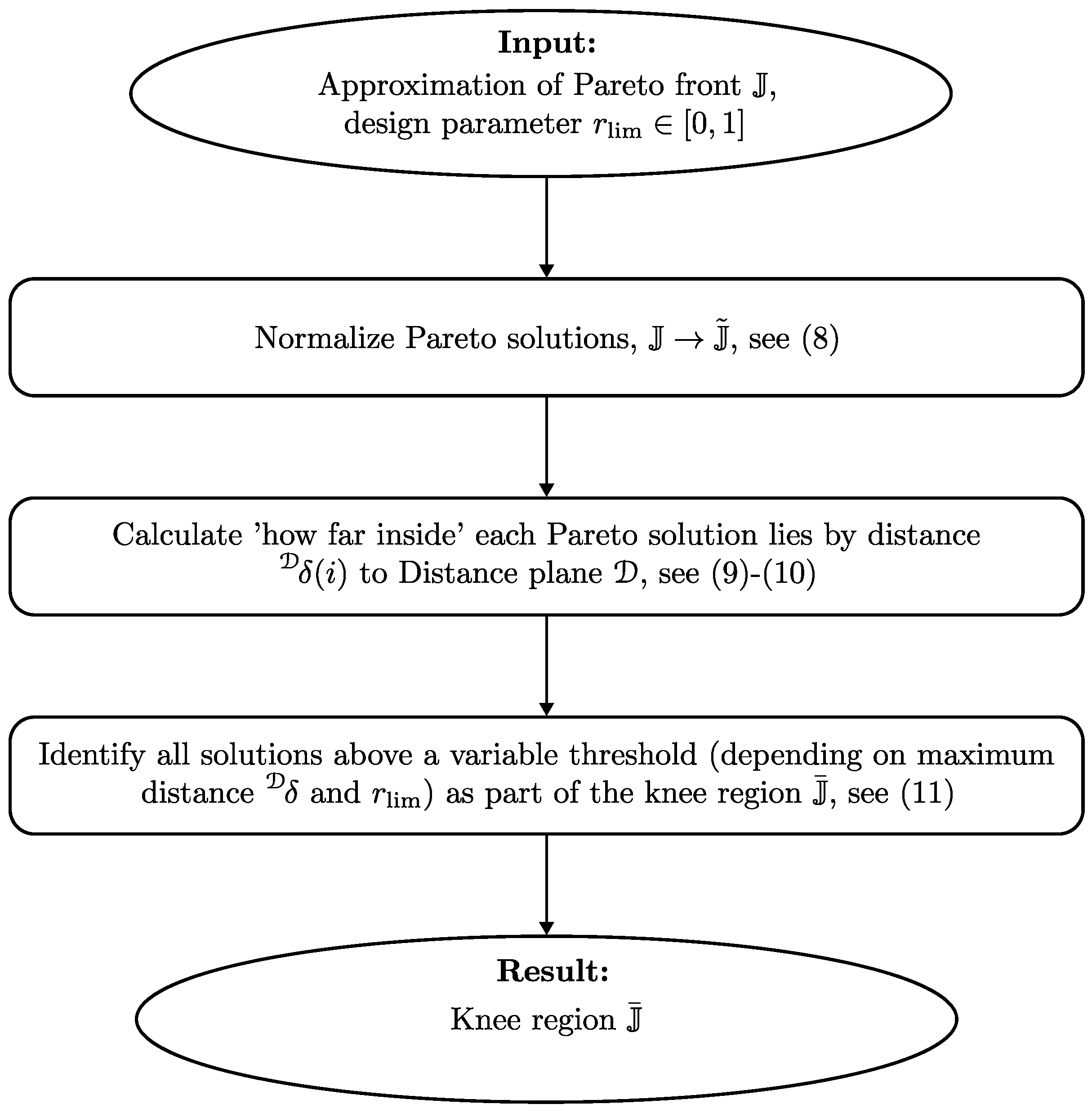
3.1. Knee Region Determination
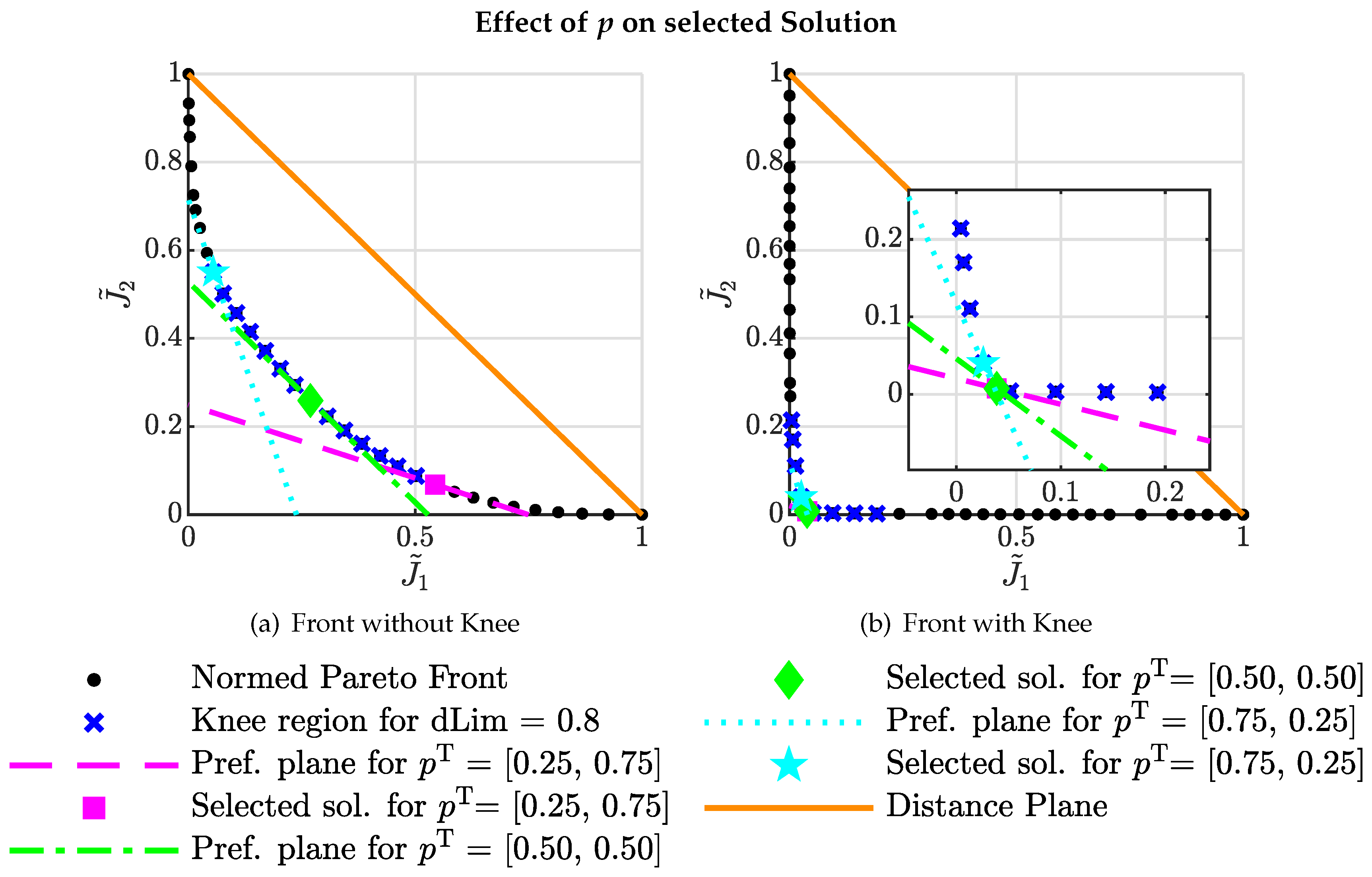
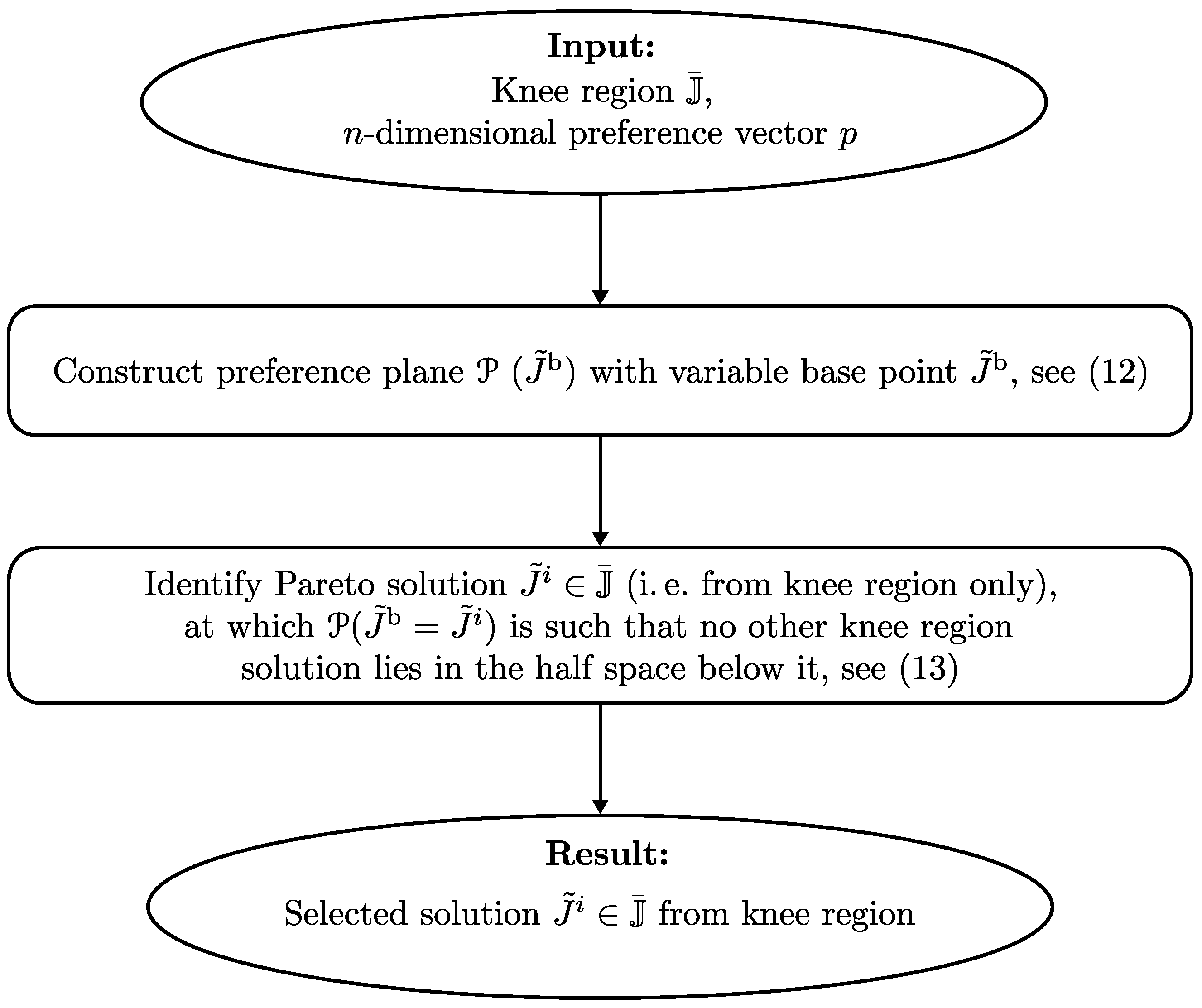
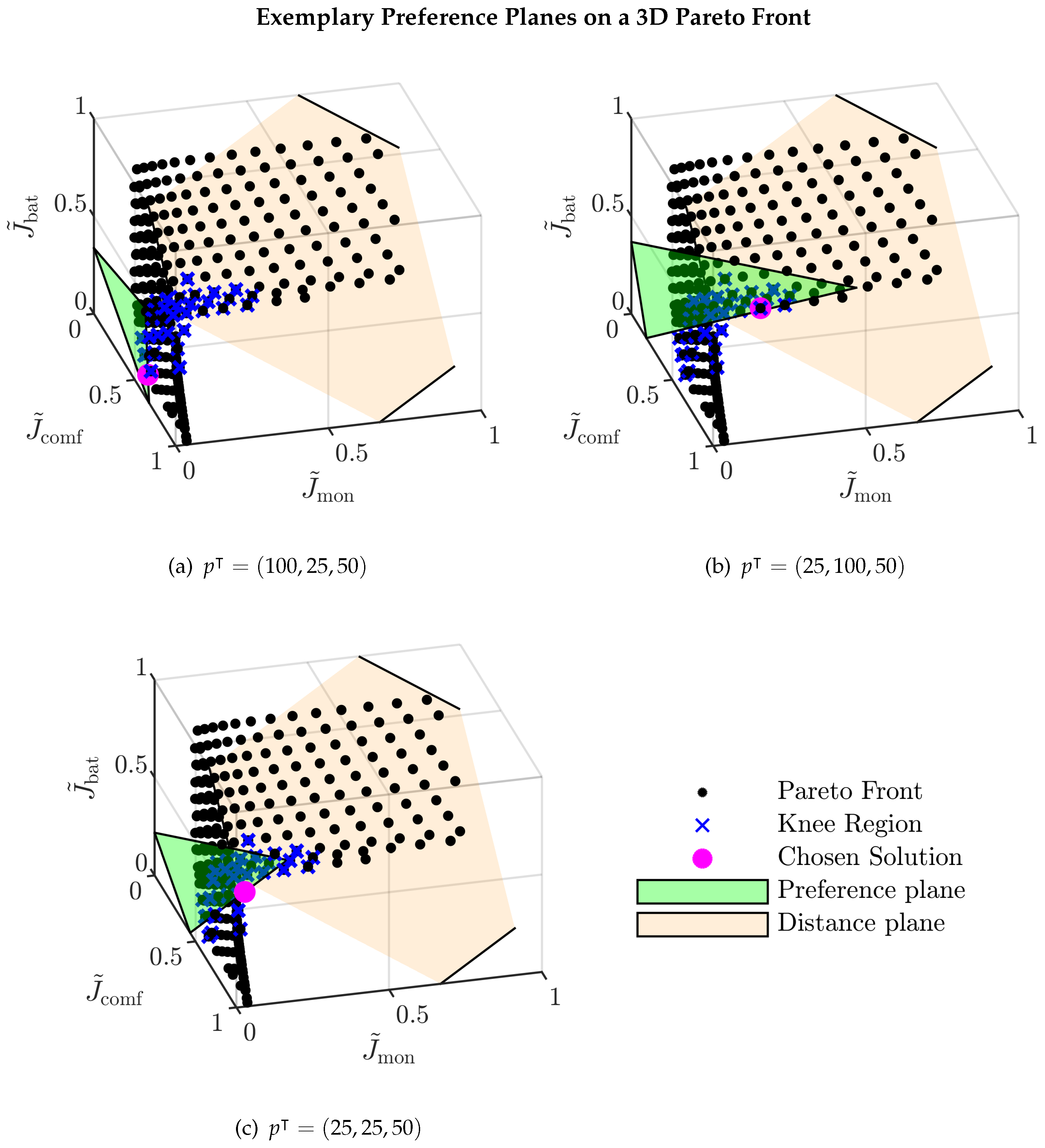
3.2. Choosing a Solution
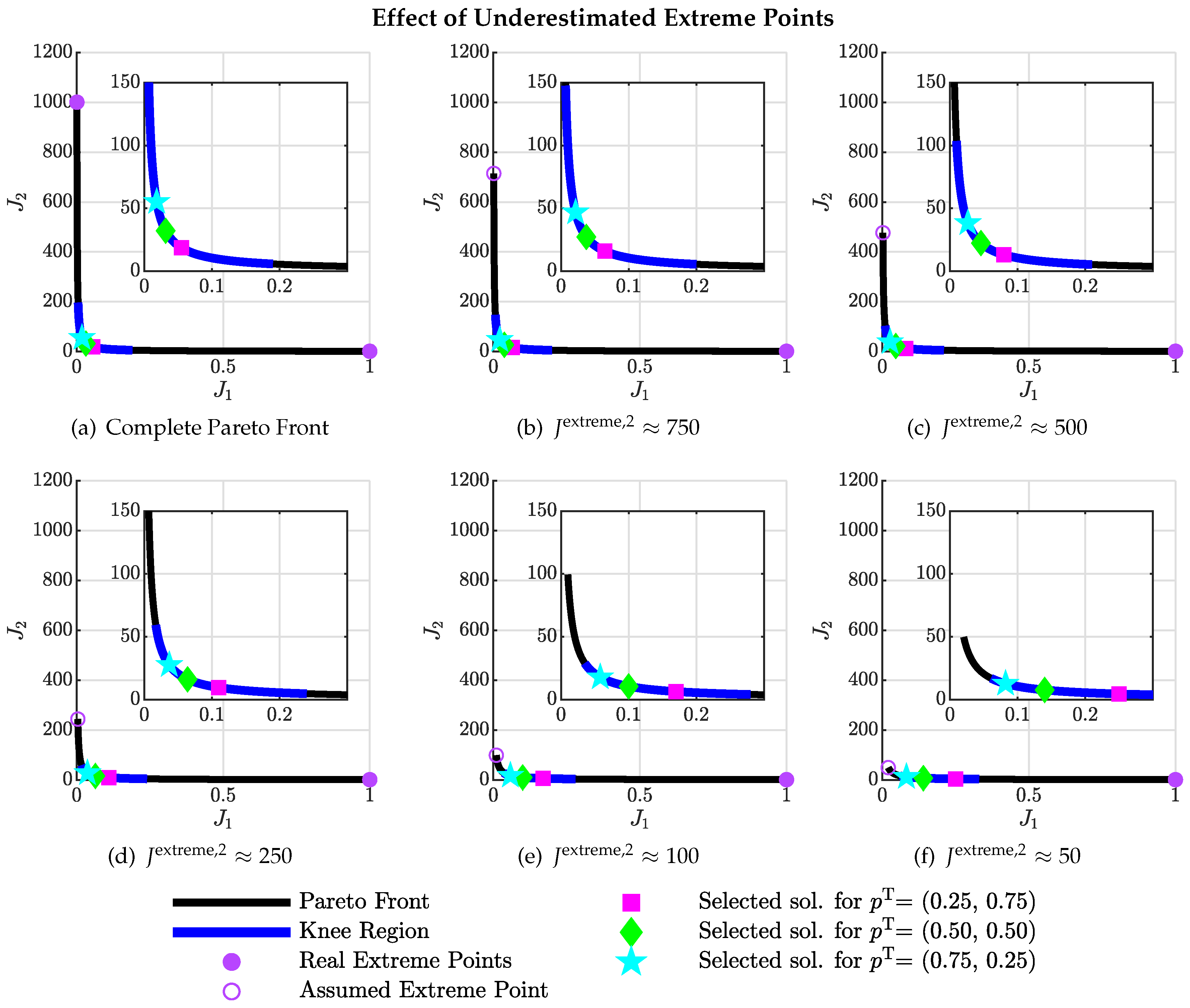
3.3. Influence of Imperfect Extreme Points
3.4. Discussion of the Preference for Knee Points
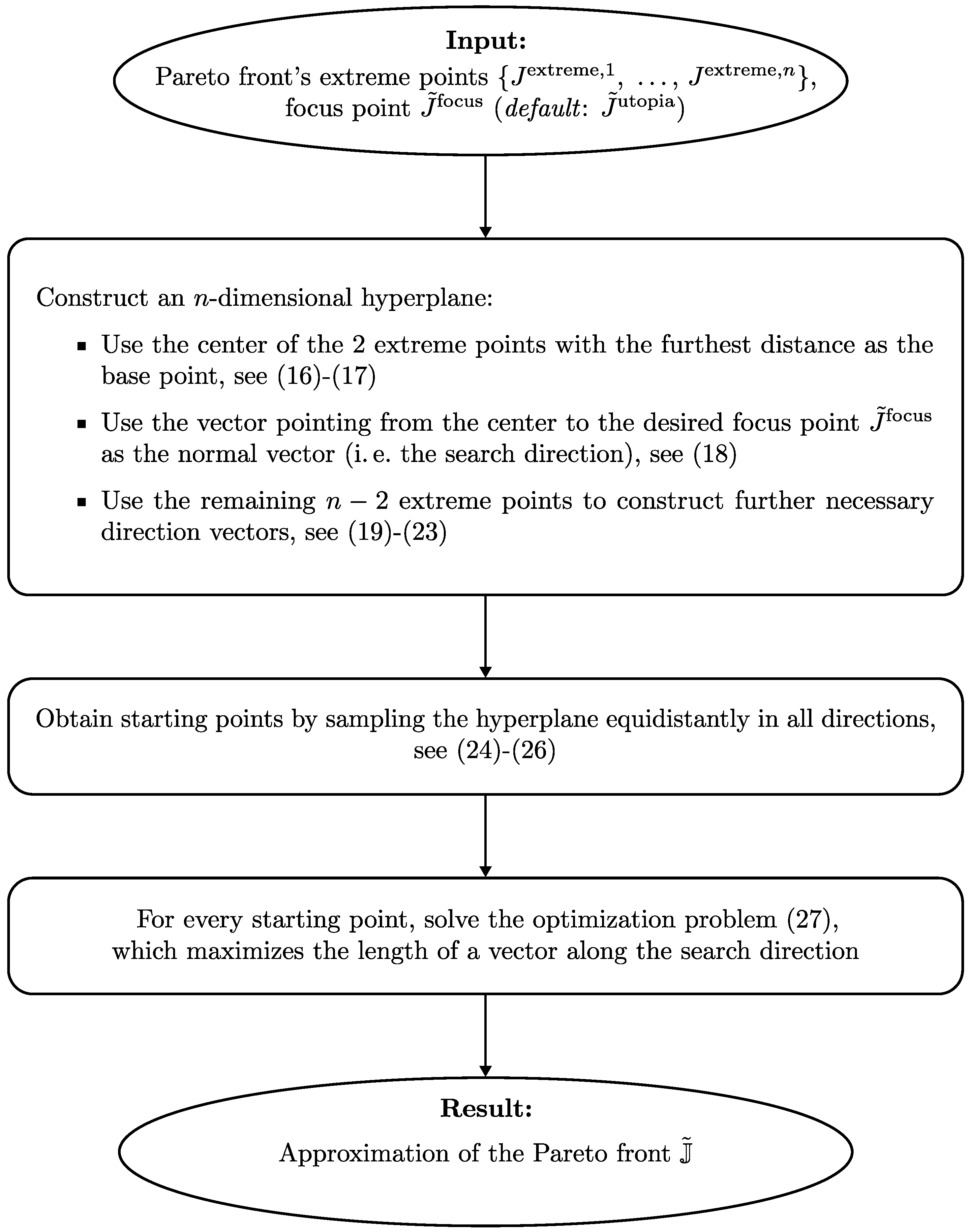
4. Focus Point Boundary Intersection Method
5. Exemplary Case Studies
5.1. Remarks on the Consequences of the Application within MPC
5.2. Comparison Approaches
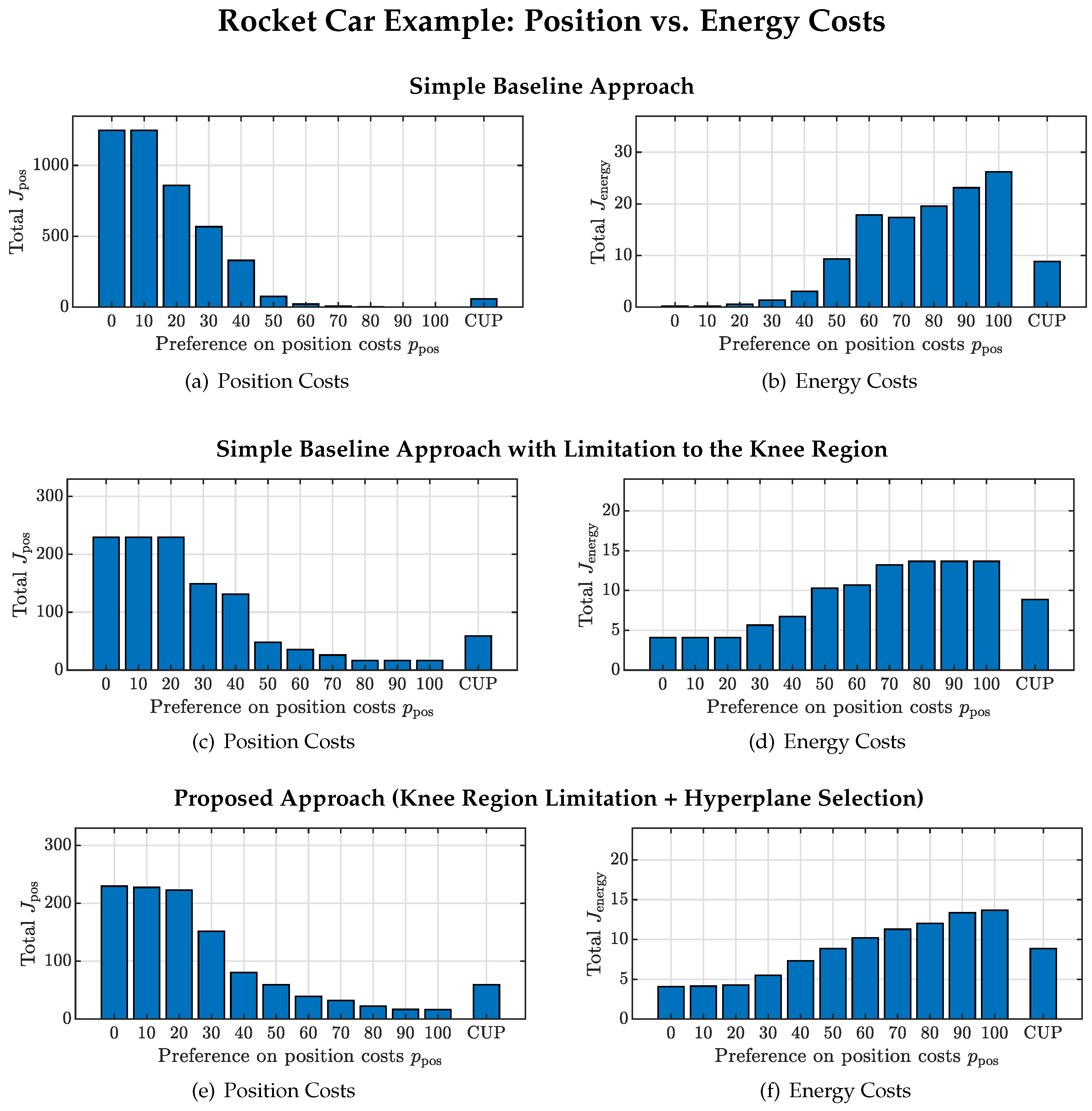
5.3. Example 1: Rocket Car
5.3.1. System Description
5.3.2. Implementation
5.3.3. Simulation Results
5.4. Example 2: Building Energy Management System

5.4.1. System Description
5.4.2. Implementation
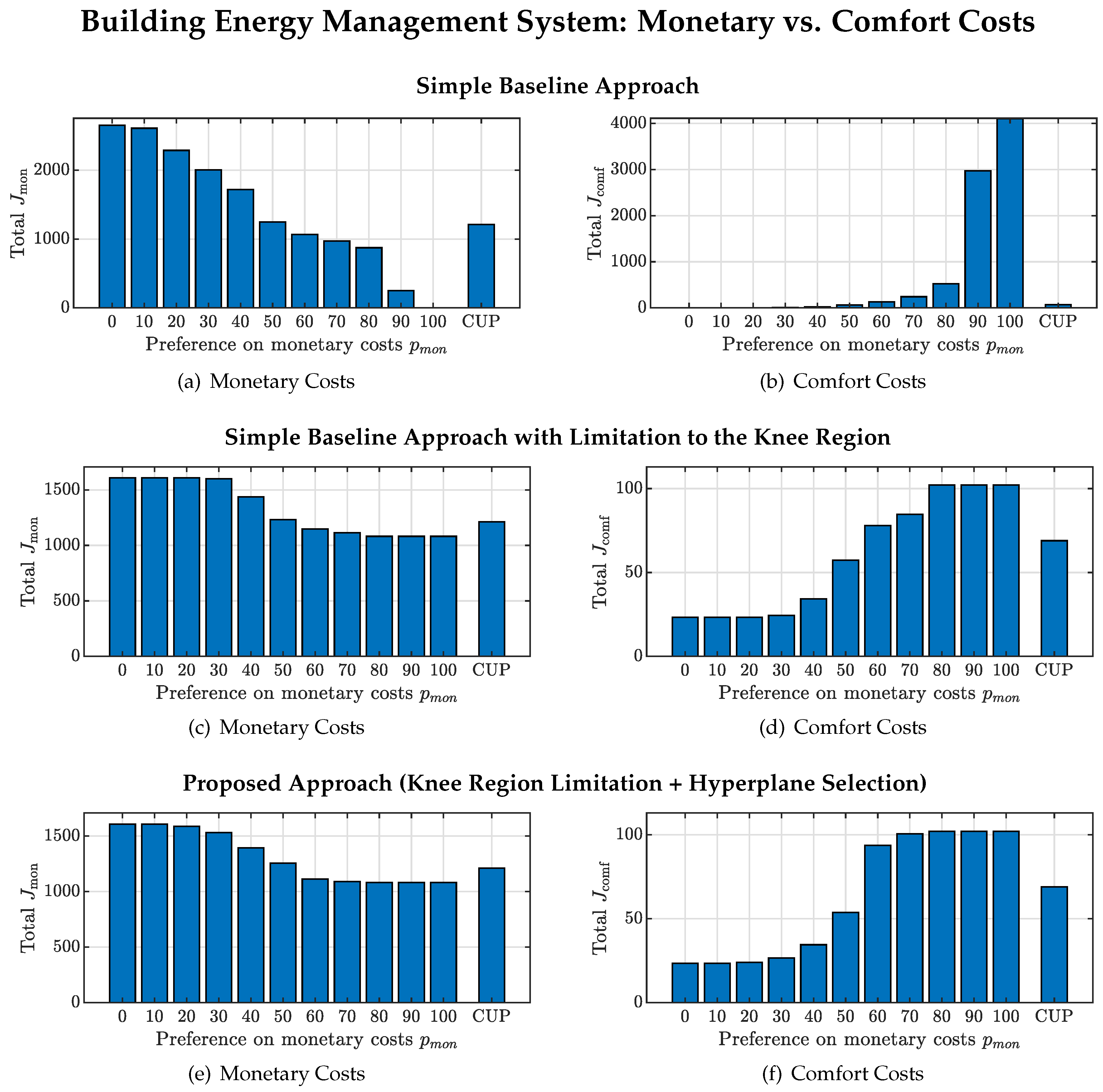
5.4.3. Simulation Results for 2 Objectives
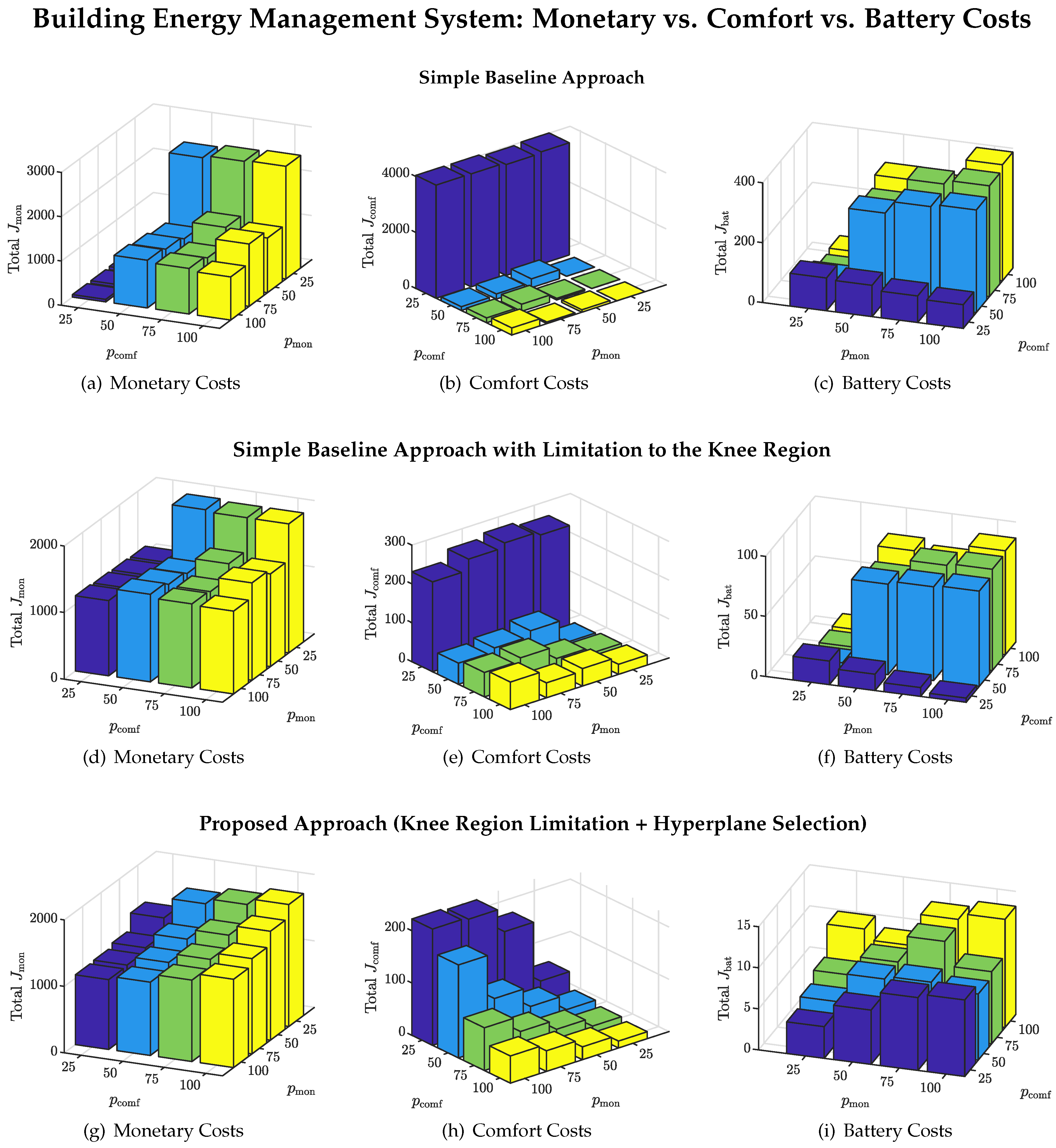
5.4.4. Simulation Results for 3 Objectives
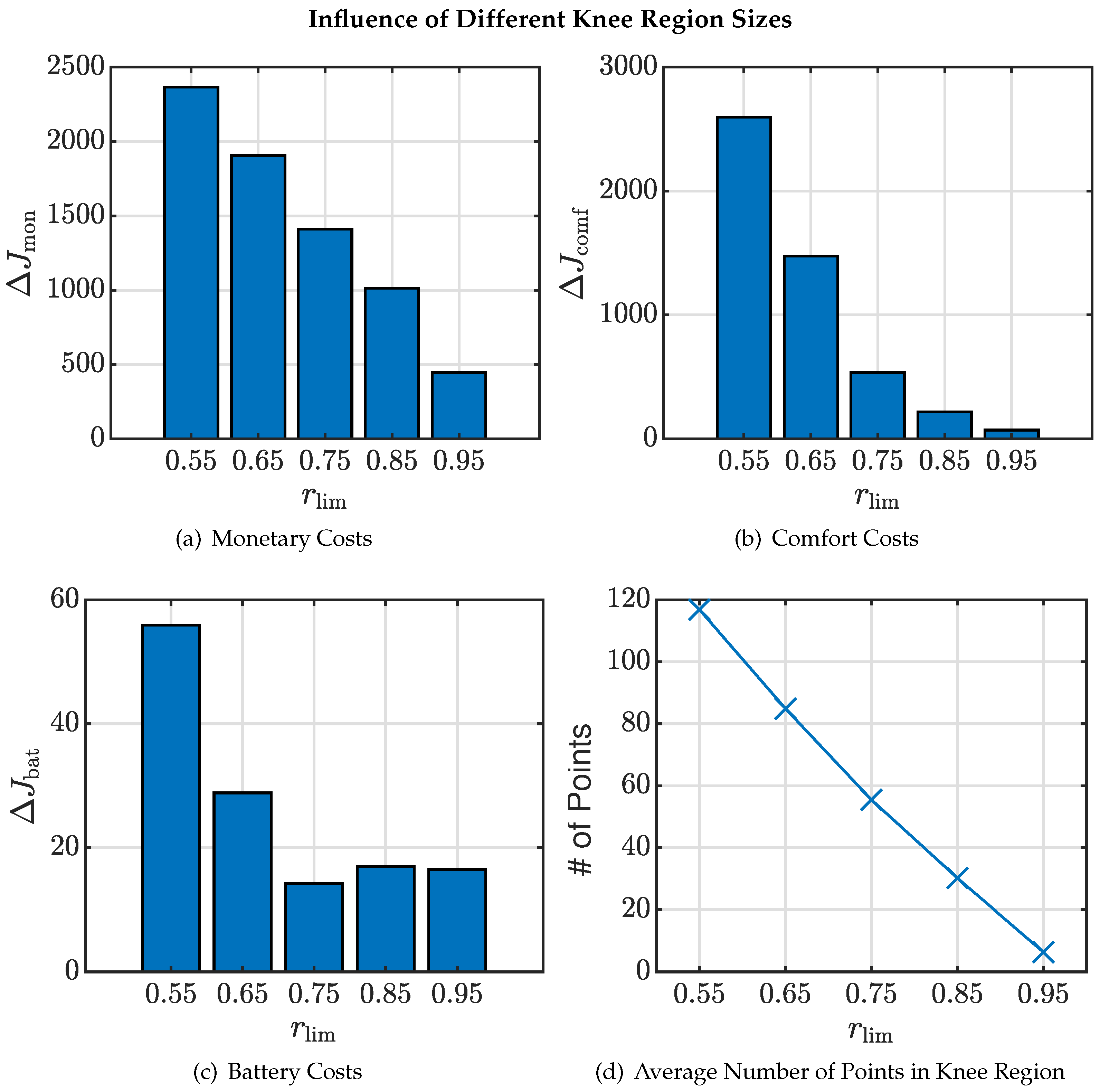
5.4.5. Influence of Knee Region Size
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CHIM | convex hull of individual minima |
| CUP | closest to Utopia point |
| DM | decision maker |
| FPBI | focus point boundary intersection |
| MOO | multi-objective optimization |
| MPC | Model Predictive Control |
| NBI | normal boundary intersection |
References
- Schmitt, T.; Engel, J.; Rodemann, T.; Adamy, J. Application of Pareto Optimization in an Economic Model Predictive Controlled Microgrid. In Proceedings of the 2020 28th Mediterranean Conference on Control and Automation (MED), Saint-Raphaël, France, 15–18 September 2020; pp. 868–874. [Google Scholar] [CrossRef]
- Schmitt, T.; Rodemann, T.; Adamy, J. Multi-objective model predictive control for microgrids. at-Automatisierungstechnik 2020, 68, 687–702. [Google Scholar] [CrossRef]
- Azzouz, R.; Bechikh, S.; Ben Said, L. Dynamic Multi-objective Optimization Using Evolutionary Algorithms: A Survey. In Recent Advances in Evolutionary Multi-Objective Optimization; Springer International Publishing: Cham, Switzerland, 2017; pp. 31–70. [Google Scholar] [CrossRef]
- Ghosh, A.; Dehuri, S. Evolutionary Algorithms for Multi-Criterion Optimization: A Survey. Int. J. Comput. Inf. Sci. 2004, 2, 38. [Google Scholar]
- Zitzler, E.; Laumanns, M.; Bleuler, S. A tutorial on evolutionary multiobjective optimization. In Metaheuristics for Multiobjective Optimisation; Springer: Berlin/Heidelberg, Germany, 2004; pp. 3–37. [Google Scholar]
- Gembicki, F.; Haimes, Y. Approach to performance and sensitivity multiobjective optimization: The goal attainment method. IEEE Trans. Autom. Control. 1975, 20, 769–771. [Google Scholar] [CrossRef]
- Pascoletti, A.; Serafini, P. Scalarizing vector optimization problems. J. Optim. Theory Appl. 1984, 42, 499–524. [Google Scholar] [CrossRef]
- Das, I.; Dennis, J.E. Normal-boundary intersection: A new method for generating the Pareto surface in nonlinear multicriteria optimization problems. SIAM J. Optim. 1998, 8, 631–657. [Google Scholar] [CrossRef] [Green Version]
- Motta, R.d.S.; Afonso, S.M.; Lyra, P.R. A modified NBI and NC method for the solution of N-multiobjective optimization problems. Struct. Multidiscip. Optim. 2012, 46, 239–259. [Google Scholar] [CrossRef]
- Ghane-Kanafi, A.; Khorram, E. A new scalarization method for finding the efficient frontier in non-convex multi-objective problems. Appl. Math. Model. 2015, 39, 7483–7498. [Google Scholar] [CrossRef]
- Messac, A.; Ismail-Yahaya, A.; Mattson, C.A. The normalized normal constraint method for generating the Pareto frontier. Struct. Multidiscip. Optim. 2003, 25, 86–98. [Google Scholar] [CrossRef]
- Mueller-Gritschneder, D.; Graeb, H.; Schlichtmann, U. A successive approach to compute the bounded Pareto front of practical multiobjective optimization problems. SIAM J. Optim. 2009, 20, 915–934. [Google Scholar] [CrossRef]
- Srinivasan, V.; Shocker, A.D. Linear programming techniques for multidimensional analysis of preferences. Psychometrika 1973, 38, 337–369. [Google Scholar] [CrossRef]
- Zavala, V.M. Real-time optimization strategies for building systems. Ind. Eng. Chem. Res. 2013, 52, 3137–3150. [Google Scholar] [CrossRef] [Green Version]
- Hwang, C.L.; Yoon, K. Multiple Attribute Decision Making: Methods and Applications, 1st ed.; Lecture Notes in Economics and Mathematical Systems 186; Springer: Berlin/Heidelberg, Germany, 1981. [Google Scholar]
- Miettinen, K. Nonlinear Multiobjective Optimization; Springer Science & Business Media: New York, NY, USA, 1999; Volume 12. [Google Scholar]
- Jin, Y.; Sendhoff, B. Incorporation Of Fuzzy Preferences Into Evolutionary Multiobjective Optimization. In Proceedings of the GECCO, New York, NY, USA, 9–13 July 2002; Volume 2, p. 683. [Google Scholar]
- Farina, M.; Amato, P. A fuzzy definition of "optimality" for many-criteria optimization problems. IEEE Trans. Syst. Man Cybern.-Part A Syst. Humans 2004, 34, 315–326. [Google Scholar] [CrossRef]
- Yang, J.B.; Xu, D.L. On the evidential reasoning algorithm for multiple attribute decision analysis under uncertainty. IEEE Trans. Syst. Man Cybern.-Part A Syst. Hum. 2002, 32, 289–304. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Liao, S.; Liu, G. Thermo-economic multi-objective optimization for a solar-dish Brayton system using NSGA-II and decision making. Int. J. Electr. Power Energy Syst. 2015, 64, 167–175. [Google Scholar] [CrossRef]
- Branke, J.; Deb, K.; Dierolf, H.; Osswald, M. Finding knees in multi-objective optimization. In Proceedings of the International Conference on Parallel Problem Solving from Nature, Birmingham, UK, 18–22 September 2004; Springer: Cham, Switzerland, 2004; pp. 722–731. [Google Scholar]
- Deb, K.; Gupta, S. Understanding knee points in bicriteria problems and their implications as preferred solution principles. Eng. Optim. 2011, 43, 1175–1204. [Google Scholar] [CrossRef]
- Braun, M.; Shukla, P.; Schmeck, H. Angle-Based Preference Models in Multi-objective Optimization. In Proceedings of the Evolutionary Multi-Criterion Optimization, Münster, Germany, 19–22 March 2017; Trautmann, H., Rudolph, G., Klamroth, K., Schütze, O., Wiecek, M., Jin, Y., Grimme, C., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 88–102. [Google Scholar]
- Bechikh, S.; Said, L.B.; Ghédira, K. Searching for knee regions of the Pareto front using mobile reference points. Soft Comput. 2011, 15, 1807–1823. [Google Scholar] [CrossRef]
- Rachmawati, L.; Srinivasan, D. Multiobjective evolutionary algorithm with controllable focus on the knees of the Pareto front. IEEE Trans. Evol. Comput. 2009, 13, 810–824. [Google Scholar] [CrossRef]
- Bhattacharjee, K.S.; Singh, H.K.; Ryan, M.; Ray, T. Bridging the Gap: Many-Objective Optimization and Informed Decision-Making. IEEE Trans. Evol. Comput. 2017, 21, 813–820. [Google Scholar] [CrossRef]
- Yu, G.; Jin, Y.; Olhofer, M. A Method for a Posteriori Identification of Knee Points Based on Solution Density. In Proceedings of the 2018 IEEE Congress on Evolutionary Computation (CEC), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Das, I. On characterizing the “knee” of the Pareto curve based on normal-boundary intersection. Struct. Optim. 1999, 18, 107–115. [Google Scholar] [CrossRef]
- Li, W.; Wang, R.; Zhang, T.; Ming, M.; Li, K. Reinvestigation of evolutionary many-objective optimization: Focus on the Pareto knee front. Inf. Sci. 2020, 522, 193–213. [Google Scholar] [CrossRef]
- Molina, J.; Santana, L.V.; Hernández-Díaz, A.G.; Coello Coello, C.A.; Caballero, R. g-dominance: Reference point based dominance for multiobjective metaheuristics. Eur. J. Oper. Res. 2009, 197, 685–692. [Google Scholar] [CrossRef]
- Hu, J.; Yu, G.; Zheng, J.; Zou, J. A preference-based multi-objective evolutionary algorithm using preference selection radius. Soft Comput. 2017, 21, 5025–5051. [Google Scholar] [CrossRef]
- Deb, K.; Miettinen, K.; Sharma, D. A hybrid integrated multi-objective optimization procedure for estimating nadir point. In Proceedings of the 5th International Conference, EMO 2009, Nantes, France, 7–10 April 2009; Springer: Berlin/Heidelberg, Germany, 2009; pp. 569–583. [Google Scholar]
- Wang, Y.; Limmer, S.; Olhofer, M.; Emmerich, M.; Bäck, T. Automatic Preference Based Multi-objective Evolutionary Algorithm on Vehicle Fleet Maintenance Scheduling Optimization. Swarm Evol. Comput. 2021, 65, 100933. [Google Scholar] [CrossRef]
- Das, I.; Dennis, J.E. A closer look at drawbacks of minimizing weighted sums of objectives for Pareto set generation in multicriteria optimization problems. Struct. Optim. 1997, 14, 63–69. [Google Scholar] [CrossRef] [Green Version]
- Ryu, N.; Min, S. Multiobjective optimization with an adaptive weight determination scheme using the concept of hyperplane. Int. J. Numer. Methods Eng. 2019, 118, 303–319. [Google Scholar] [CrossRef]
- Hua, Y.; Liu, Q.; Hao, K.; Jin, Y. A Survey of Evolutionary Algorithms for Multi-Objective Optimization Problems With Irregular Pareto Fronts. IEEE/CAA J. Autom. Sin. 2021, 8, 303–318. [Google Scholar] [CrossRef]
- De Vito, D.; Scattolini, R. A receding horizon approach to the multiobjective control problem. In Proceedings of the 2007 46th IEEE Conference on Decision and Control, New Orleans, LA, USA, 12–14 December 2007; pp. 6029–6034. [Google Scholar]
- Bemporad, A.; de la Peña, D.M. Multiobjective model predictive control. Automatica 2009, 45, 2823–2830. [Google Scholar] [CrossRef]
- Zavala, V.M.; Flores-Tlacuahuac, A. Stability of multiobjective predictive control: A utopia-tracking approach. Automatica 2012, 48, 2627–2632. [Google Scholar] [CrossRef]
- Schmitt, T.; Engel, J.; Hoffmann, M.; Rodemann, T. PARODIS: One MPC Framework to control them all. Almost. In Proceedings of the 2021 IEEE Conference on Control Technology and Applications (CCTA), San Diego, CA, USA, 9–11 August 2021. [Google Scholar]
- Di Somma, M.; Yan, B.; Bianco, N.; Graditi, G.; Luh, P.; Mongibello, L.; Naso, V. Multi-objective design optimization of distributed energy systems through cost and exergy assessments. Appl. Energy 2017, 204, 1299–1316. [Google Scholar] [CrossRef]
- Moghaddam, A.A.; Seifi, A.; Niknam, T.; Alizadeh Pahlavani, M.R. Multi-objective operation management of a renewable MG (micro-grid) with back-up micro-turbine/fuel cell/battery hybrid power source. Energy 2011, 36, 6490–6507. [Google Scholar] [CrossRef]
- Schmitt, T.; Rodemann, T.; Adamy, J. The Cost of Photovoltaic Forecasting Errors in Microgrid Control with Peak Pricing. Energies 2021, 14, 2569. [Google Scholar] [CrossRef]
- Engel, J.; Schmitt, T.; Rodemann, T.; Adamy, J. Hierarchical Economic Model Predictive Control Approach for a Building Energy Management System With Scenario-Driven EV Charging. IEEE Trans. Smart Grid 2022, 13, 3082–3093. [Google Scholar] [CrossRef]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schmitt, T.; Hoffmann, M.; Rodemann, T.; Adamy, J. Incorporating Human Preferences in Decision Making for Dynamic Multi-Objective Optimization in Model Predictive Control. Inventions 2022, 7, 46. https://doi.org/10.3390/inventions7030046
Schmitt T, Hoffmann M, Rodemann T, Adamy J. Incorporating Human Preferences in Decision Making for Dynamic Multi-Objective Optimization in Model Predictive Control. Inventions. 2022; 7(3):46. https://doi.org/10.3390/inventions7030046
Chicago/Turabian StyleSchmitt, Thomas, Matthias Hoffmann, Tobias Rodemann, and Jürgen Adamy. 2022. "Incorporating Human Preferences in Decision Making for Dynamic Multi-Objective Optimization in Model Predictive Control" Inventions 7, no. 3: 46. https://doi.org/10.3390/inventions7030046