
Kalman Filter Adaptation to Disturbances of the Observer’s Parameters

 , and
, and {kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- Synthesis of observers with the property of invariance to disturbances of their own parameters [10].
- Two-stage estimation of the system state parameters using the extended Kalman filter, which reduces its computational complexity when expanding the state vector [12].
- Extension of the observation vector based on an additional evaluating observer formed using nonlinear programming [17].
- Robust scaling of the observer’s transmission coefficient, which increases the stability of the evaluation process [18].
- Ensuring the invariance of the Kalman filtering process to parametric disturbances of the observer through the use of integrated neural networks [19], etc.
- Orientation and navigation systems of mobile robots, in which the navigation parameters of the robot are adjusted based on taking into account the zero speed of the lower point of the wheel (or the robot’s foot) at the moment of contact with the earth’s surface [24].
- Transport information and measurement systems of various types—railway, automobile, marine, unmanned aerial vehicle (UAV), etc., in which the orientation and navigation parameters of an object are corrected at the time of passing reference points with precisely known coordinates (for example, traffic lights, eurobalises, radio frequency tags, buoys, etc.) [25,26,27,28,29,30].
- Complexing orientation and navigation systems based on inertial sensing elements, allowing to solve the navigation problem inside confined rooms [31] and so on.
2. Theoretical Assumptions
2.1. Task Definition
2.2. Task Solution
3. Results and Discussions
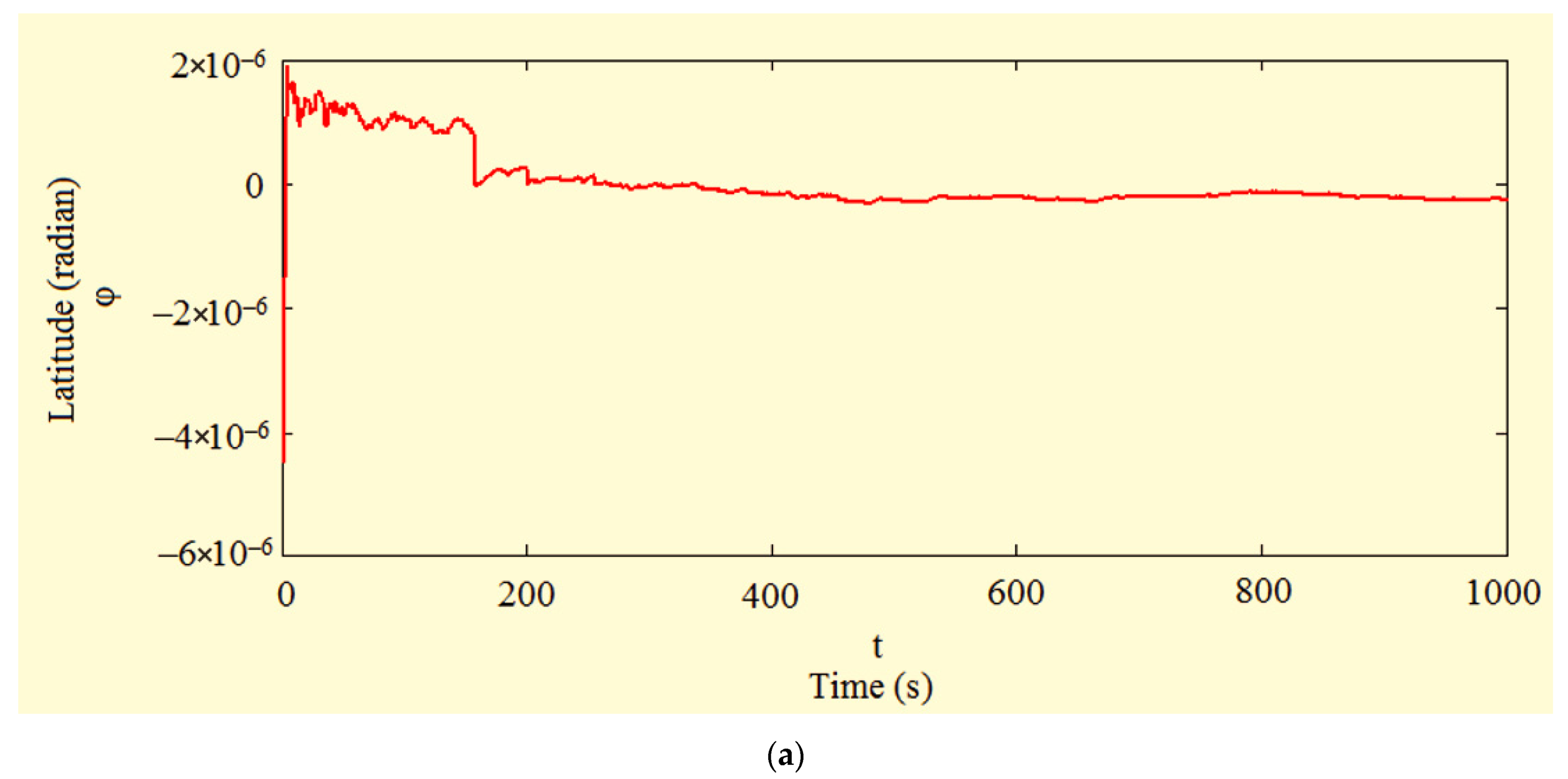
Numerical Solving the Adaptive Assessment of Navigation Parameters of an Unmanned Vehicle
- Starting point coordinates of the UV-movement φ0 = 0.76 rad and λ0 = 0.32 rad;
- Time interval [0; 1000] s;
- UV-movement constant velocity V = 18 m s−1;
- UV-trajectory along the Earth’s surface is loxodromic with an azimuthal angle A = 0.23 rad;
- Random height h changes generated by the trajectory relief are distributed according to the Gaussian law with zero mean and dispersion Gh = (0.14 m)2;
- Type of UV navigation system is satellite-based.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fan, Y.; Xu, K.; Wu, H.; Zheng, Y.; Tao, B. Spatiotemporal Modeling for Nonlinear Distributed Thermal Processes Based on KL Decomposition, MLP and LSTM Network. IEEE Access 2020, 8, 25111–25121. [Google Scholar] [CrossRef]
- Urrea, C.; Agramonte, R. Kalman Filter: Historical Overview and Review of Its Use in Robotics 60 Years after Its Creation. J. Sens. 2021, 2021, 9674015. [Google Scholar] [CrossRef]
- Sinitsyn, I.N. Kalman and Pugachev Filters; Logos: Moscow, Russia, 2007; ISBN 978-5-98704-270-4. (In Russian) [Google Scholar]
- Rovira, E.; McGarry, K.; Parasuraman, R. Effects of imperfect automation on decision making in a simulated command and control task. Hum. Factors: J. Hum. Factors Ergon. Soc. 2007, 49, 76–87. [Google Scholar] [CrossRef] [PubMed]
- Buscarino, A.; Fortuna, L.; Frasca, M.; Muscato, G. CHAOS DOES HELP MOTION CONTROL. Int. J. Bifurc. Chaos 2007, 17, 3577–3581. [Google Scholar] [CrossRef]
- Liu, T.-H.; Wen, Y.-L.; Li, G.-Q.; Nie, X.-N. Optimization and Experimental Study of an Intelligent Bamboo-Splitting Machine Charging Manipulator. J. Robot. 2020, 2020, 4675301. [Google Scholar] [CrossRef]
- Bucolo, M.; Buscarino, A.; Fortuna, L.; Famoso, C. Stochastic resonance in imperfect electromechanical systems. In Proceedings of the 2020 IEEE 29th International Symposium on Industrial Electronics (ISIE), Delft, The Netherlands, 17–19 June 2020; pp. 210–214. [Google Scholar] [CrossRef]
- Bucolo, M.; Buscarino, A.; Famoso, C.; Fortuna, L.; Frasca, M. Control of imperfect dynamical systems. Nonlinear Dyn. 2019, 98, 2989–2999. [Google Scholar] [CrossRef]
- Chen, W.-H.; Yang, J.; Guo, L.; Li, S. Disturbance-Observer-Based Control and Related Methods—An Overview. IEEE Trans. Ind. Electron. 2015, 63, 1083–1095. [Google Scholar] [CrossRef] [Green Version]
- Hartley, R.; Ghaffari, M.; Eustice, R.M.; Grizzle, J.W. Contact-aided invariant extended Kalman filtering for robot state estimation. Int. J. Robot. Res. 2020, 39, 402–430. [Google Scholar] [CrossRef]
- Zhong, Y.; Zhang, W.; Zhang, Y.; Zuo, J.; Zhan, H. Sensor Fault Detection and Diagnosis for an Unmanned Quadrotor Helicopter. J. Intell. Robot. Syst. 2019, 96, 555–572. [Google Scholar] [CrossRef]
- Hsieh, C.-S.; Chen, F.-C. Optimal Solution of the Two-Stage Kalman Estimator. IEEE Trans. Automat. Contr. 1999, 44, 194–199. [Google Scholar] [CrossRef] [Green Version]
- Oveisi, A.; Nestorovic, T. Mixed Kalman-Fuzzy Sliding Mode State Observer in Disturbance Rejection Control of a Vibrating Smart Structure. Int. J. Acoust. Vib. 2019, 24, 677–686. [Google Scholar] [CrossRef]
- Rana, R.; Agarwal, V.; Gaur, P.; Parthasarathy, H. Design of Optimal UKF State Observer–Controller for Stochastic Dynamical Systems. IEEE Trans. Ind. Appl. 2020, 57, 1840–1859. [Google Scholar] [CrossRef]
- Tan, J.; Xu, F.; Wang, X.; Yang, J.; Liang, B. Invariant set-based robust fault detection and optimal fault estimation for discrete-time LPV systems with bounded uncertainties. Int. J. Syst. Sci. 2019, 50, 2962–2978. [Google Scholar] [CrossRef]
- Li, J.; Wang, Z.; Zhang, W.; Raissi, T.; Shen, Y. Interval observer design for continuous-time linear parameter-varying systems. Syst. Control. Lett. 2019, 134, 104541. [Google Scholar] [CrossRef]
- Wan, Y.; Keviczky, T. Real-time nonlinear moving horizon observer with pre-estimation for aircraft sensor fault detection and estimation. Int. J. Robust Nonlinear Control 2017, 29, 5394–5411. [Google Scholar] [CrossRef]
- Minowa, A.; Toda, M. A High-Gain Observer-Based Approach to Robust Motion Control of Towed Underwater Vehicles. IEEE J. Ocean. Eng. 2018, 44, 997–1010. [Google Scholar] [CrossRef]
- Novi, T.; Capitani, R.; Annicchiarico, C. An integrated artificial neural network—Unscented Kalman filter vehicle sideslip angle estimation based on inertial measurement unit measurements. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2018, 233, 1864–1878. [Google Scholar] [CrossRef]
- Sasiadek, J.Z.; Wang, Q. Low cost automation using INS/GPS data fusion for accurate positioning. Robotica 2003, 21, 255–260. [Google Scholar] [CrossRef] [Green Version]
- Hide, C.; Moore, T.; Smith, M. Adaptive Kalman filtering algorithms for integrating GPS and low cost INS. In Proceedings of the PLANS 2004. Position Location and Navigation Symposium, Monterey, CA, USA, 26–29 April 2004; pp. 227–233. [Google Scholar] [CrossRef]
- Herrera, E.P.; Kaufmann, H. Adaptive methods of Kalman filtering for personal positioning systems. In Proceedings of the 23rd International Technical Meeting of the Satellite Division of the Institute of Navigation, Portland, OR, USA, 21–24 September 2010. [Google Scholar]
- Mohamed, A.H.; Schwarz, K.P. Adaptive Kalman Filtering for INS/GPS. J. Geod. 1999, 73, 193–203. [Google Scholar] [CrossRef]
- Looney, M. Optimization of navigation characteristics of the mobile robot. Compon. Technol. 2012, 126, 48–50. [Google Scholar]
- Litvin, M.A.; Malyugina, A.A.; Miller, A.B.; Stepanov, A.N.; Chickrin, D.E. Error Classification and Approximation in Inertial Navigational Systems. Inf. Process. 2014, 14, 326–339. [Google Scholar]
- Hu, C.; Chen, W.; Chen, Y.; Liu, D. Adaptive Kalman Filtering for Vehicle Navigation. J. Glob. Position. Syst. 2003, 2, 42–47. [Google Scholar] [CrossRef] [Green Version]
- Reznichenko, V.I.; Maleev, P.I.; Smirnov, M.Y. The satellite correction of orientation parameters for marine objects. Navig. Hydrogr. 2008, 27, 25–32. [Google Scholar]
- Tsyplakov, A.A. An Introduction to State Space Modelling. Quantile 2011, 2011, 1–24. [Google Scholar]
- Mehra, R. On the identification of variances and adaptive Kalman filtering. IEEE Trans. Autom. Control. 1970, 15, 175–184. [Google Scholar] [CrossRef]
- Velikanova, E.P.; Voroshilin, E.P. Adaptive estimating of maneuvering object position in changeable radio channel transmission gain. Dokl. Tomsk. Gos. Univ. Sist. Upr. I Radioèlektroniki 2012, 26, 29–35. (In Russian) [Google Scholar]
- Shilina, V.A. Inertial Sensor System for Indoor Navigation. Available online: http://ainsnt.ru/doc/778220.html (accessed on 5 January 2020).
- Sokolov, S.; Polyakova, M.V.; Kucherenko, P.A. Analytic Synthesis of a Kalman Adaptive Filter on the Basis of Irregular Precise Measurements. Meas. Tech. 2018, 61, 232–237. [Google Scholar] [CrossRef]
- Sokolov, S.V.; Novikov, A.I. Adaptive estimation of UVs navigation parameters by irregular inertial-satellite measurements. Int. J. Intell. Unmanned Syst. 2020, 9, 274–282. [Google Scholar] [CrossRef]
- Sokolov, S.; Novikov, A.; Polyakova, M. Adaptive Stochastic Filtration Based on the Estimation of the Covariance Matrix of Measurement Noises Using Irregular Accurate Observations. Inventions 2021, 6, 10. [Google Scholar] [CrossRef]
- Chernov, A.A.; Yastrebov, V.D. Disturbances of the Kalman filtering process. Cosm. Res. 1984, 22, 12–19. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manin, A.A.; Sokolov, S.V.; Novikov, A.I.; Polyakova, M.V.; Demidov, D.N.; Novikova, T.P. Kalman Filter Adaptation to Disturbances of the Observer’s Parameters. Inventions 2021, 6, 80. https://doi.org/10.3390/inventions6040080
Manin AA, Sokolov SV, Novikov AI, Polyakova MV, Demidov DN, Novikova TP. Kalman Filter Adaptation to Disturbances of the Observer’s Parameters. Inventions. 2021; 6(4):80. https://doi.org/10.3390/inventions6040080
Chicago/Turabian StyleManin, Alexander A., Sergey V. Sokolov, Arthur I. Novikov, Marianna V. Polyakova, Dmitriy N. Demidov, and Tatyana P. Novikova. 2021. "Kalman Filter Adaptation to Disturbances of the Observer’s Parameters" Inventions 6, no. 4: 80. https://doi.org/10.3390/inventions6040080