
A Novel 2-D Point Absorber Numerical Modelling Method



Abstract
:1. Introduction
2. Materials and Methods
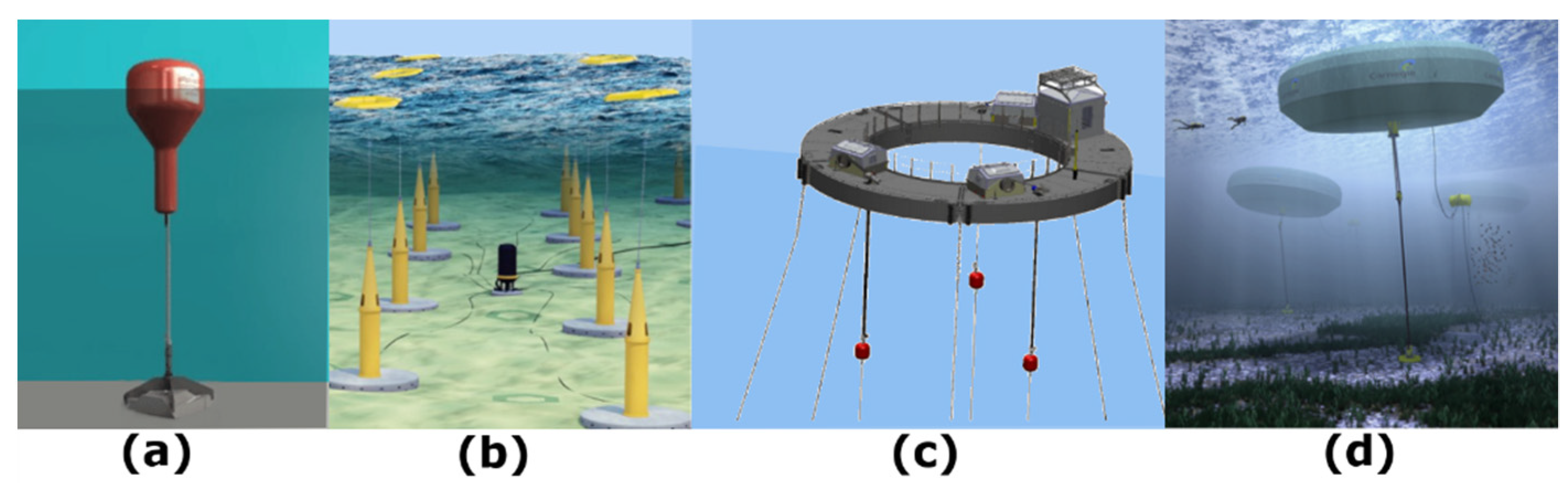
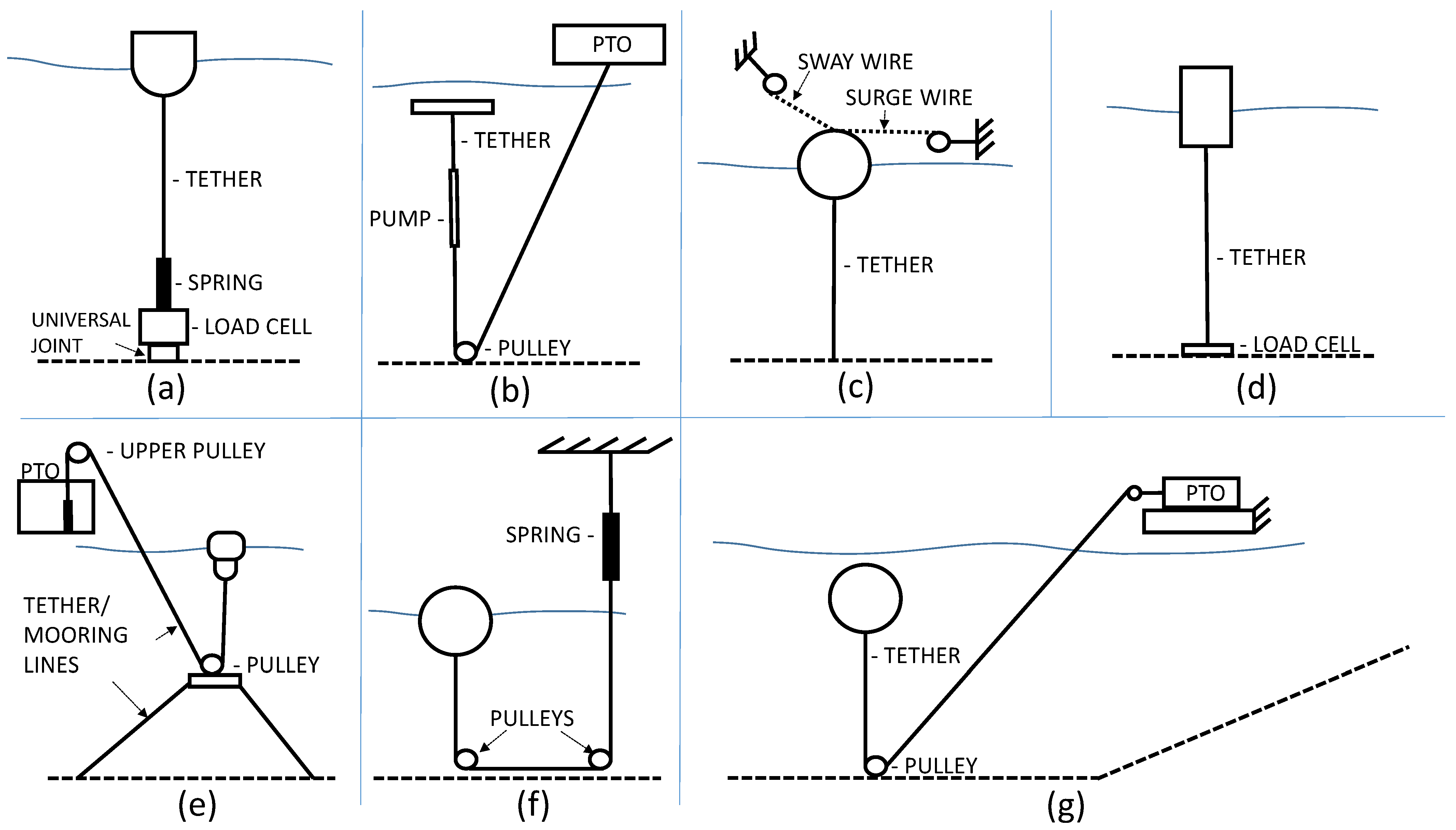
2.1. Point Absorber Wave Energy Converters
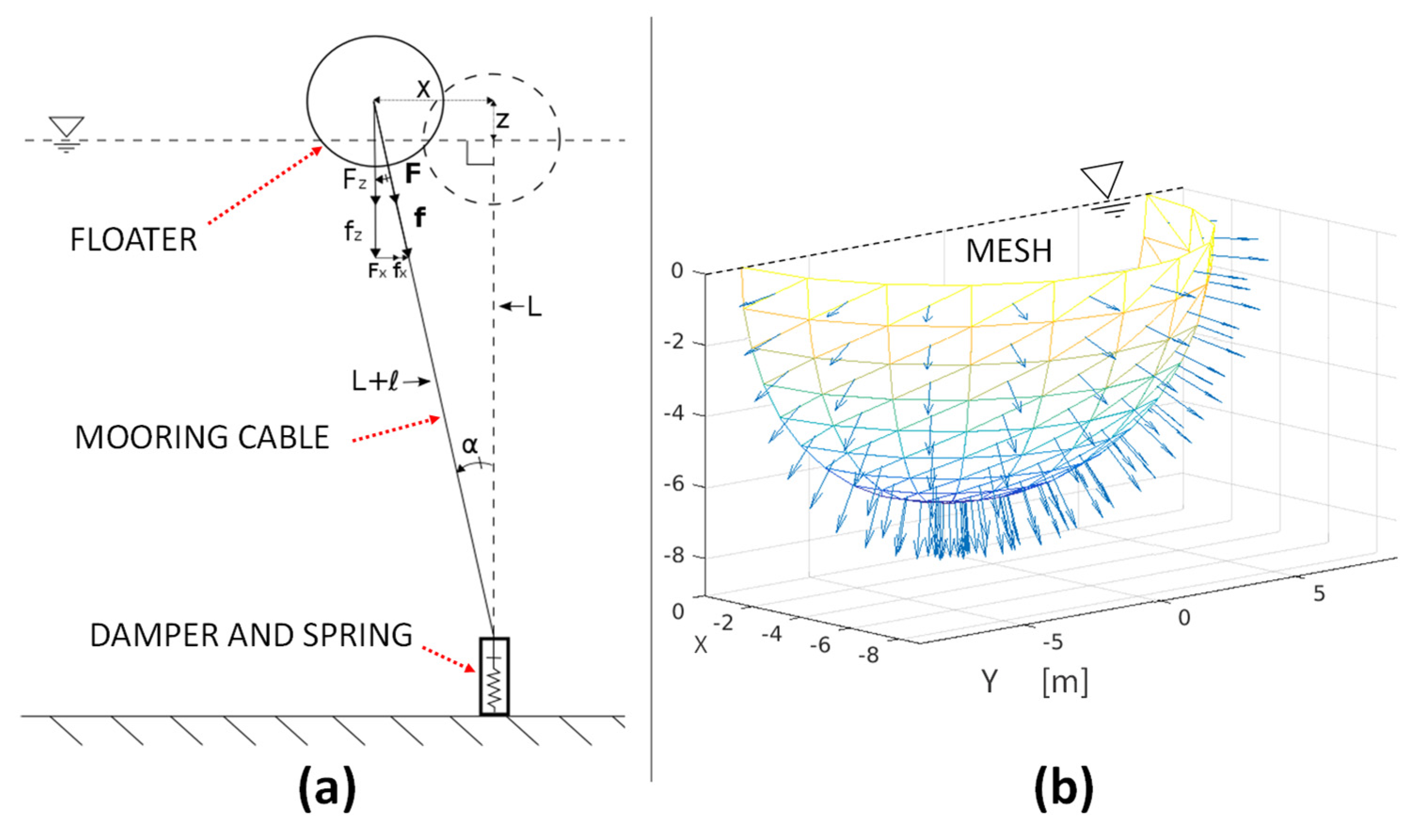
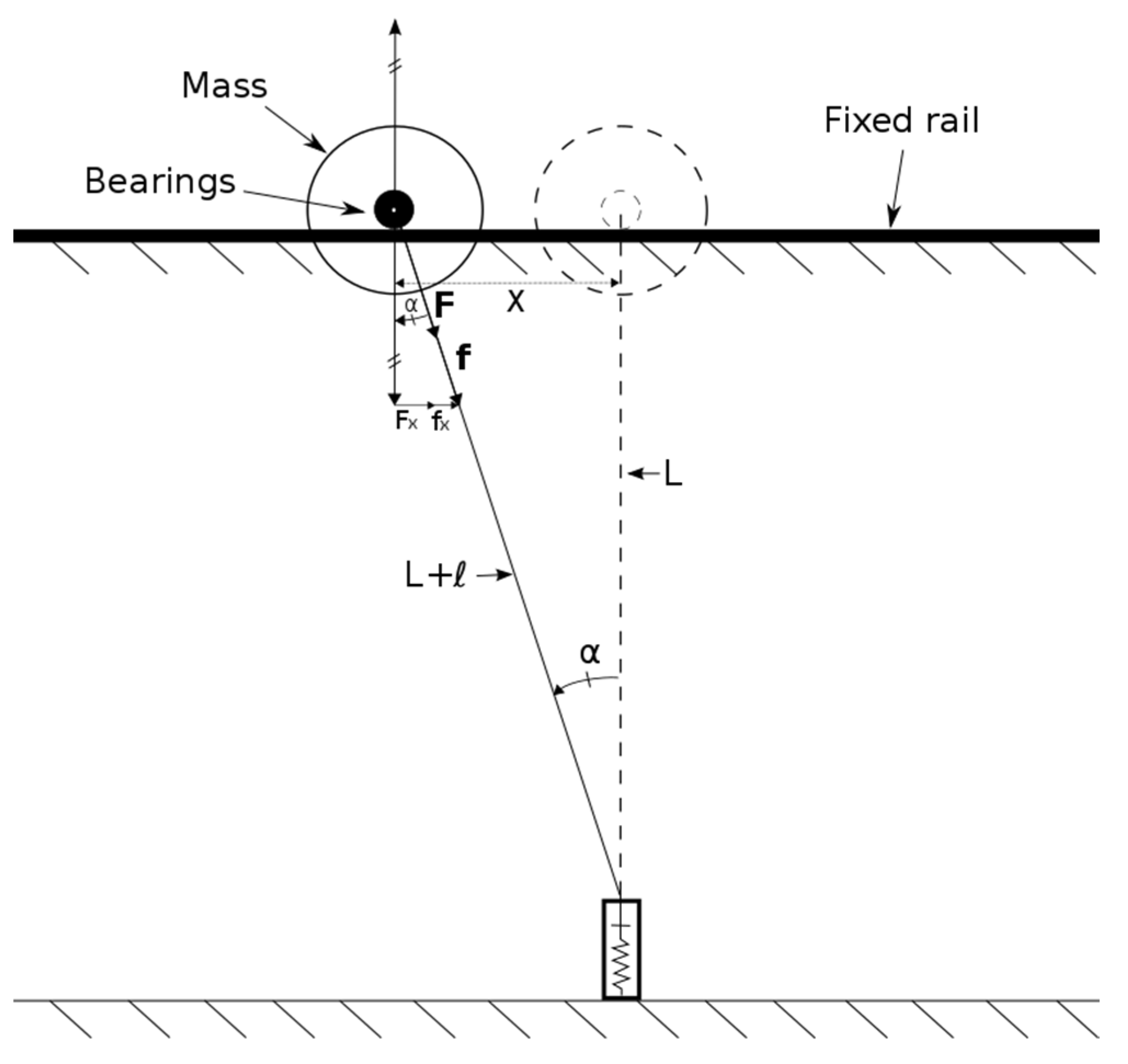
2.2. Point Absorber Model Characteristics
2.3. Linear Frequency-Domain Analysis
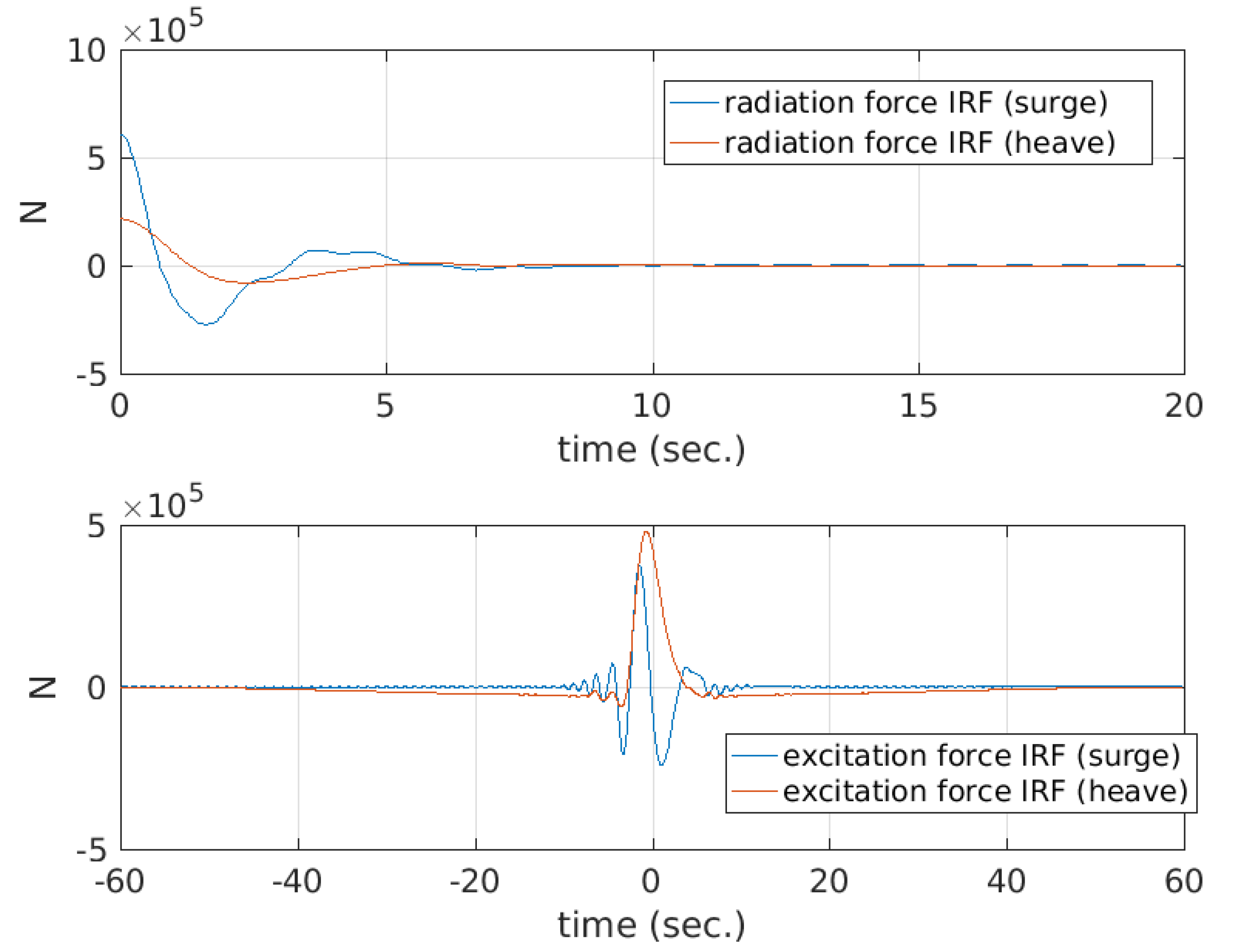
2.4. Time-Domain Formulation
2.5. First-Order Wave Loads
2.6. Second-Order Wave Drift Loads
2.7. Numerical Formulation
- 1.
- Definition of the free surface elevation signal using an empirical spectrum or by importing a defined from the real-time record;
- 2.
- Finding the points where peaks, through and zero-crossings occur;
- 3.
- Defining a signal of the instantaneous wave period;
- 4.
- Interpolation of vectors found in the previous two steps;
- 5.
- Interpolation of the reflection coefficient, which depends on the instantaneous wave period;
- 6.
- Evaluation of Equation (13);
- 7.
- Adding the found waves drift load vector to the first-order wave load horizontal component vector.
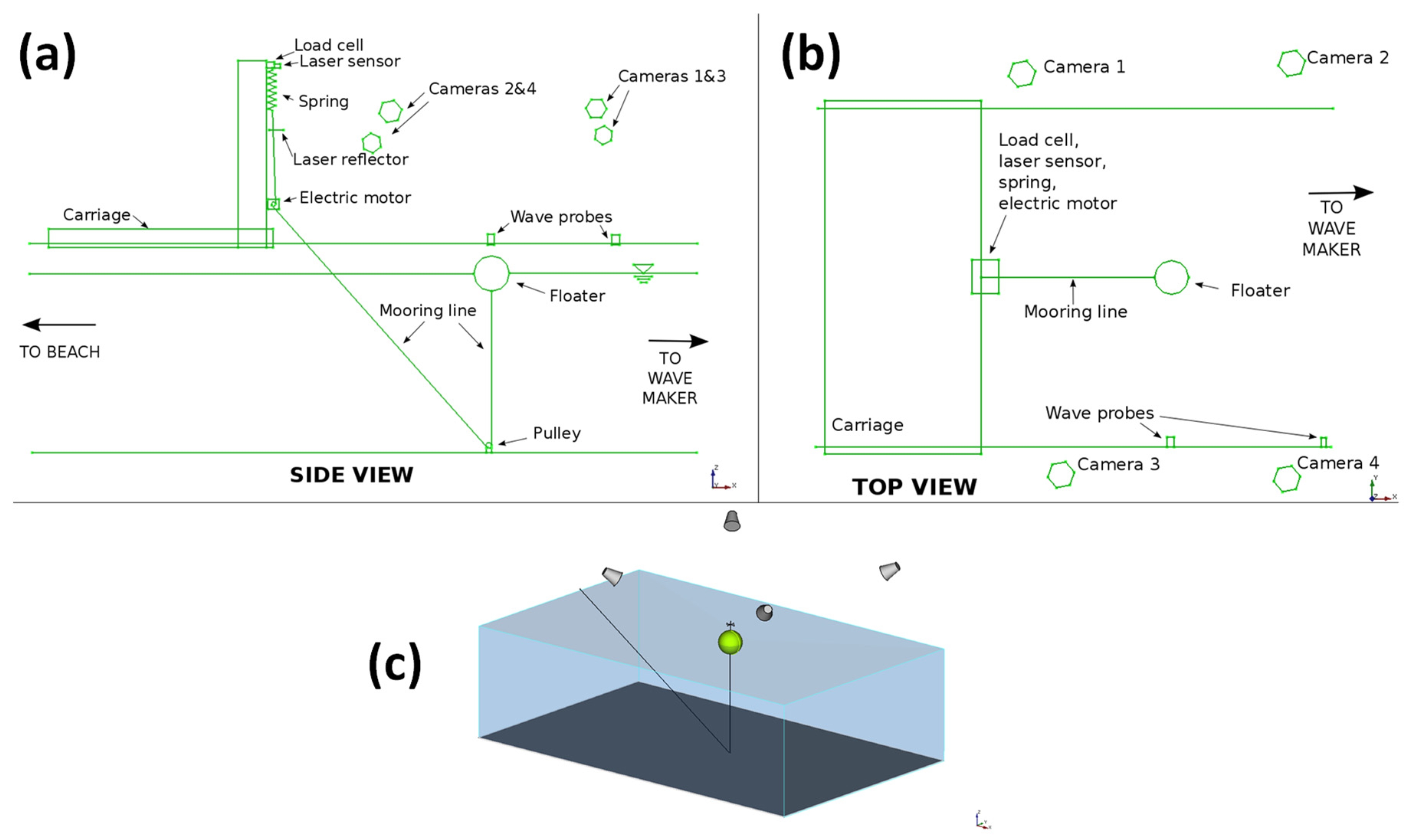
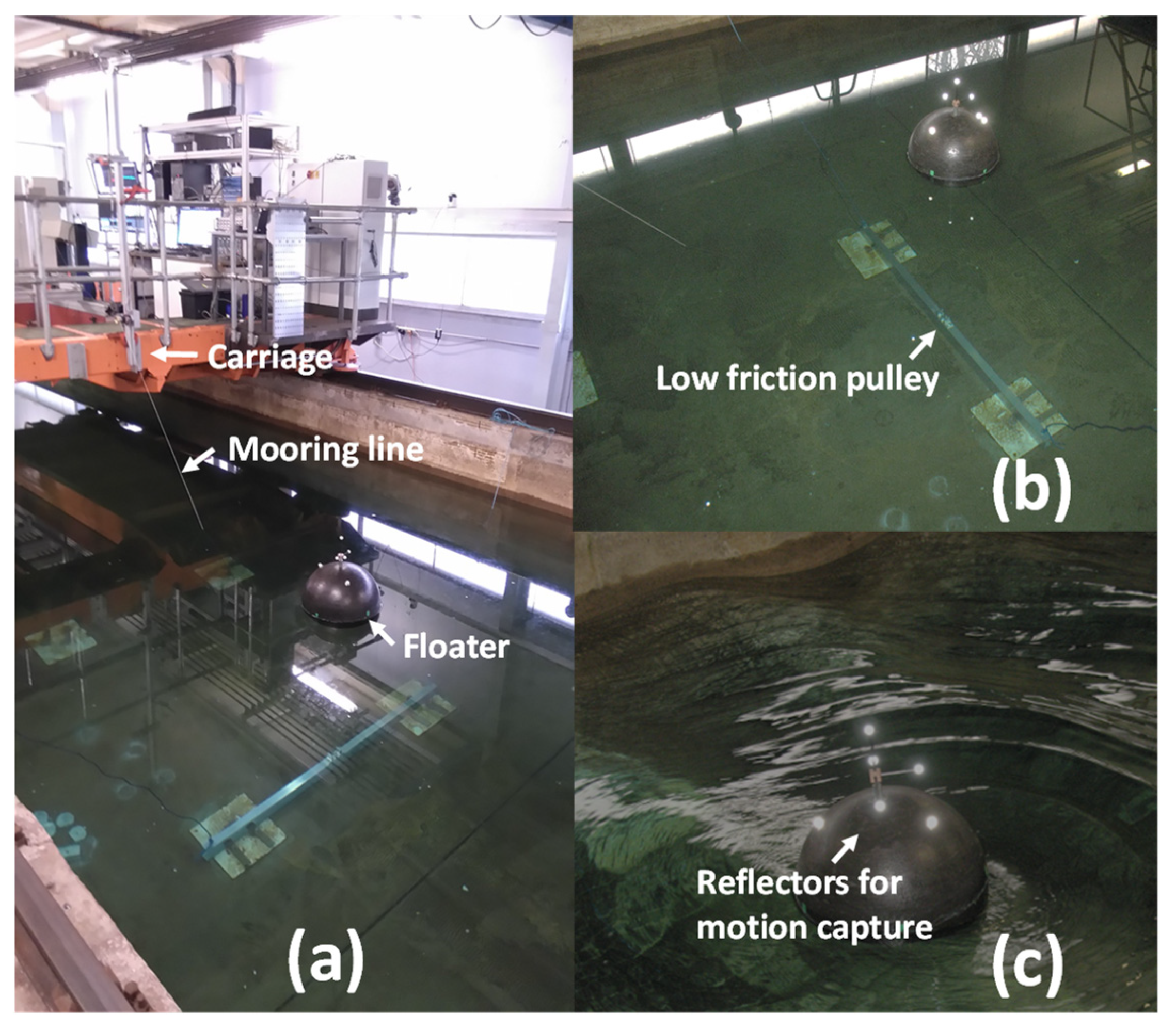
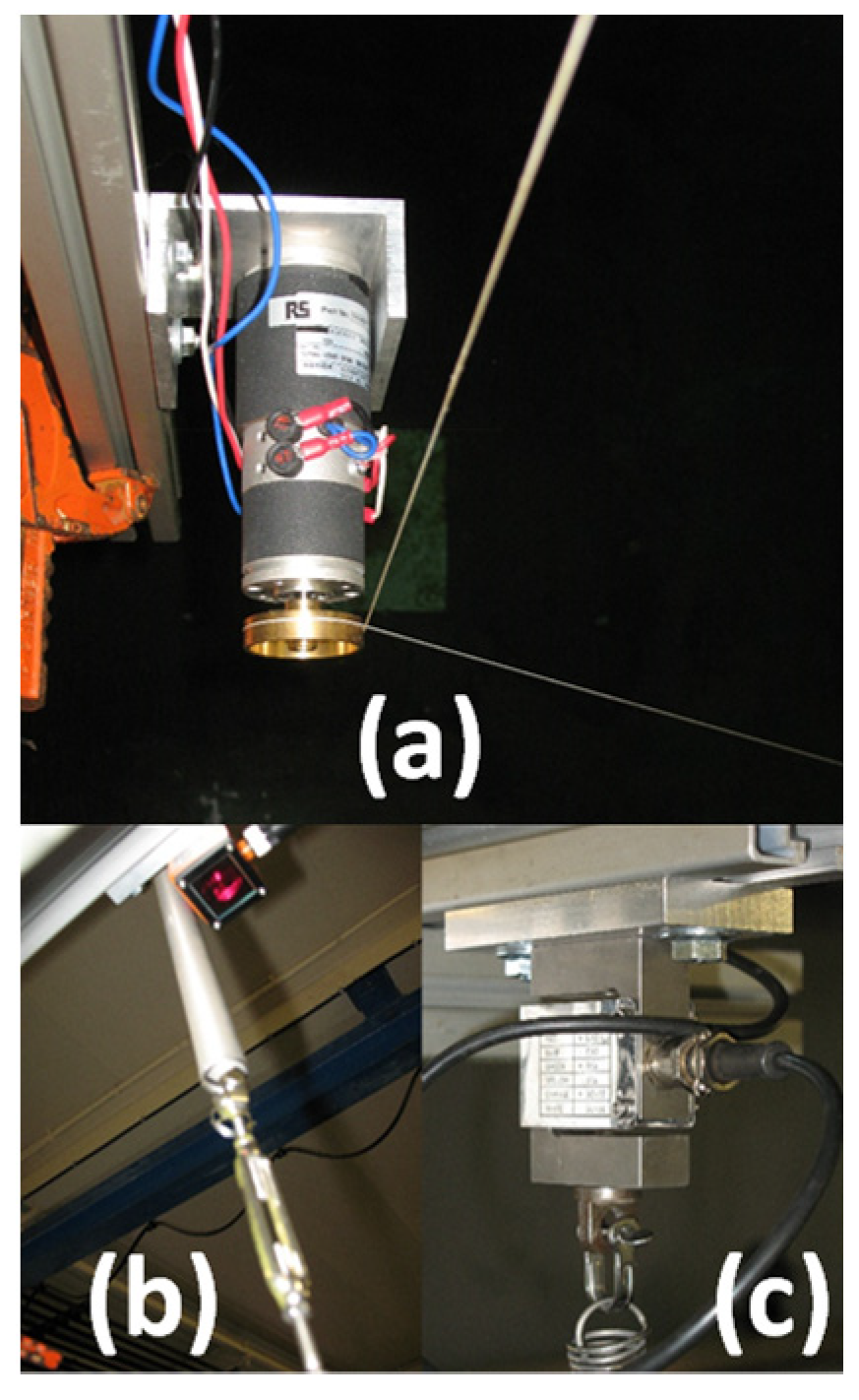
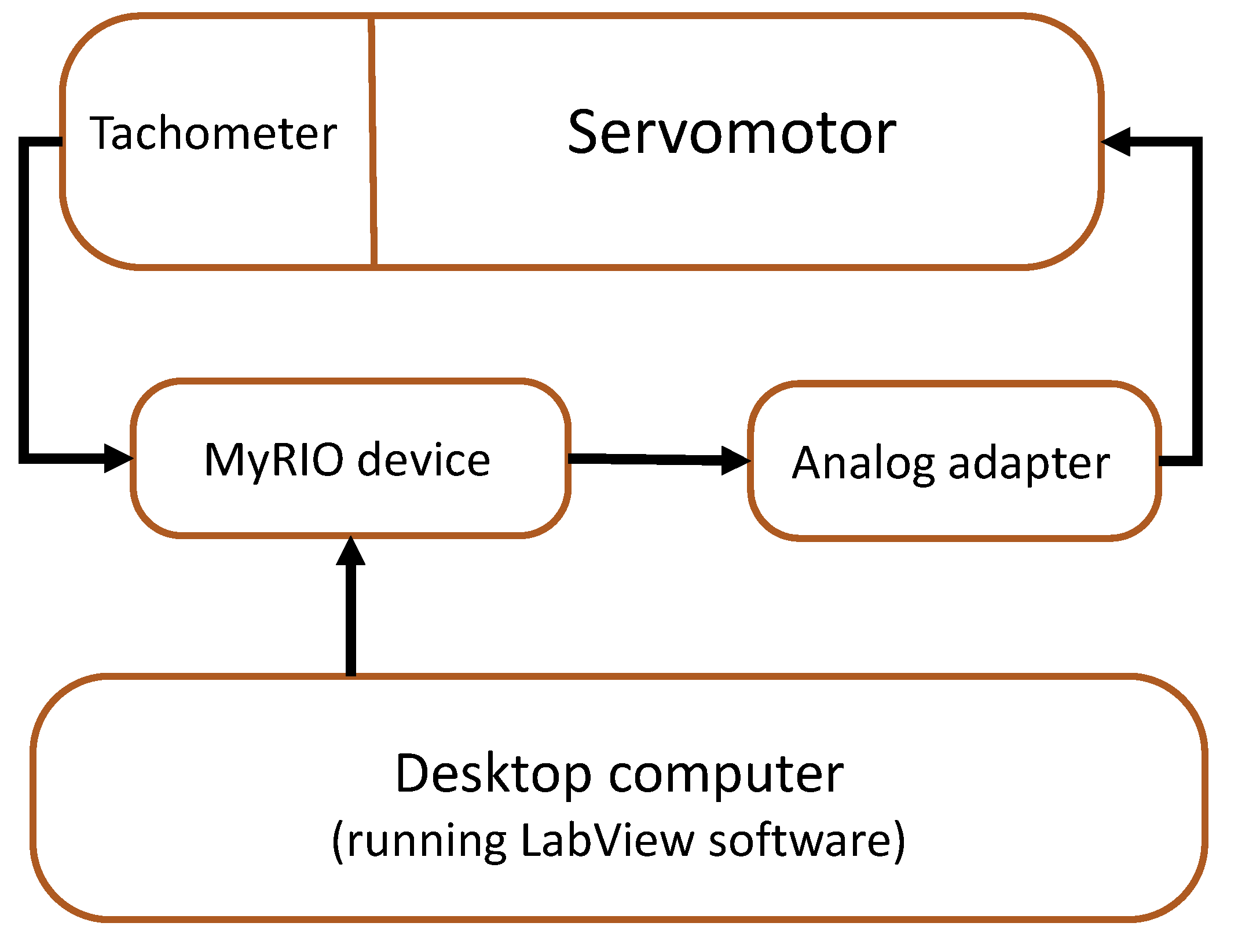
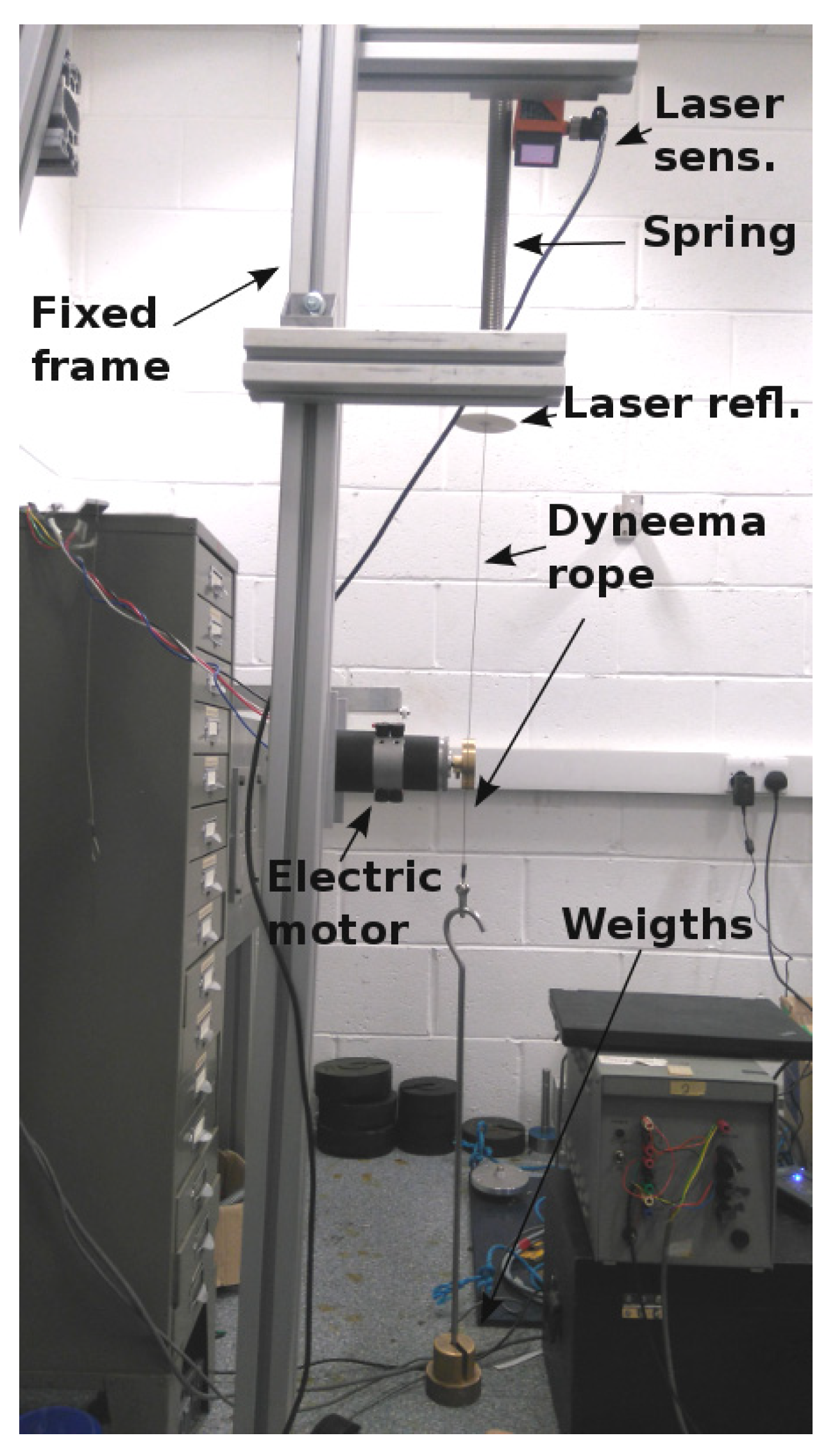
2.8. Experimental Study
- Length = 76 m;
- Width = 4.6 m;
- Depth = 0.5–2.3 m;
- Waves making: variable-water-depth computer-controlled flaps wavemaker;
- Beach: variable-water-depth sloping beach (reflection coefficient typically less than 5%).
2.9. Calibration and Uncertainty Analysis
3. Results
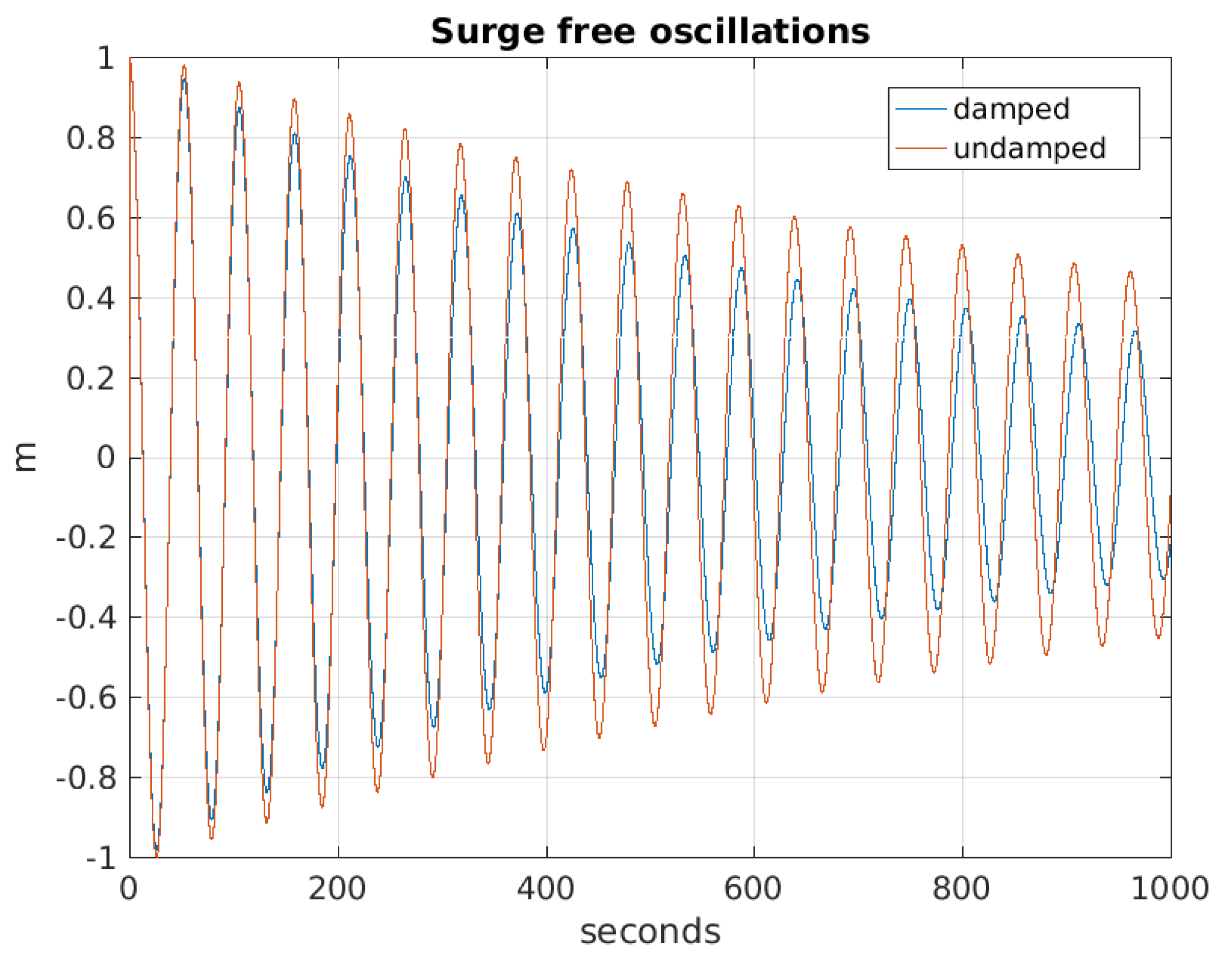
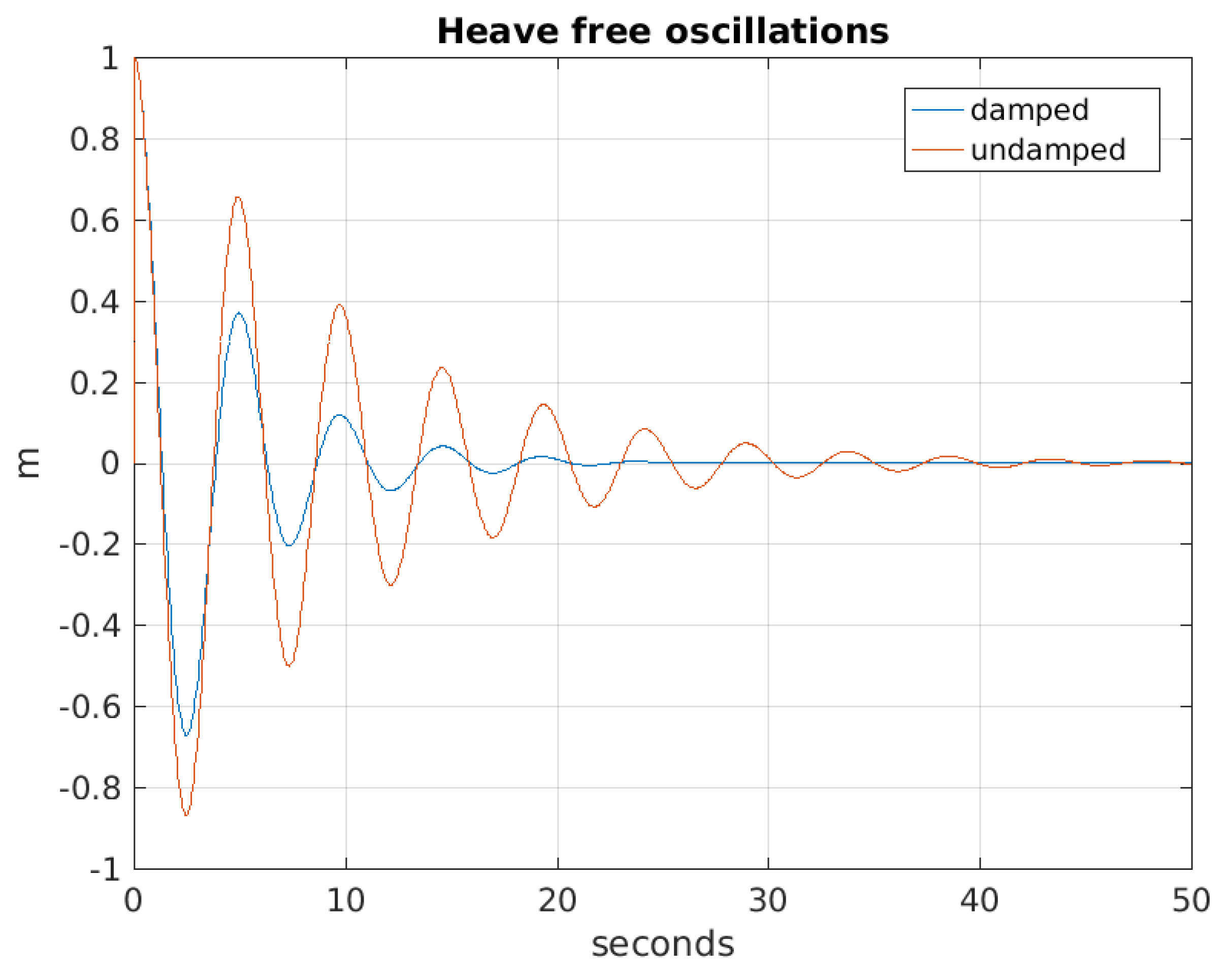
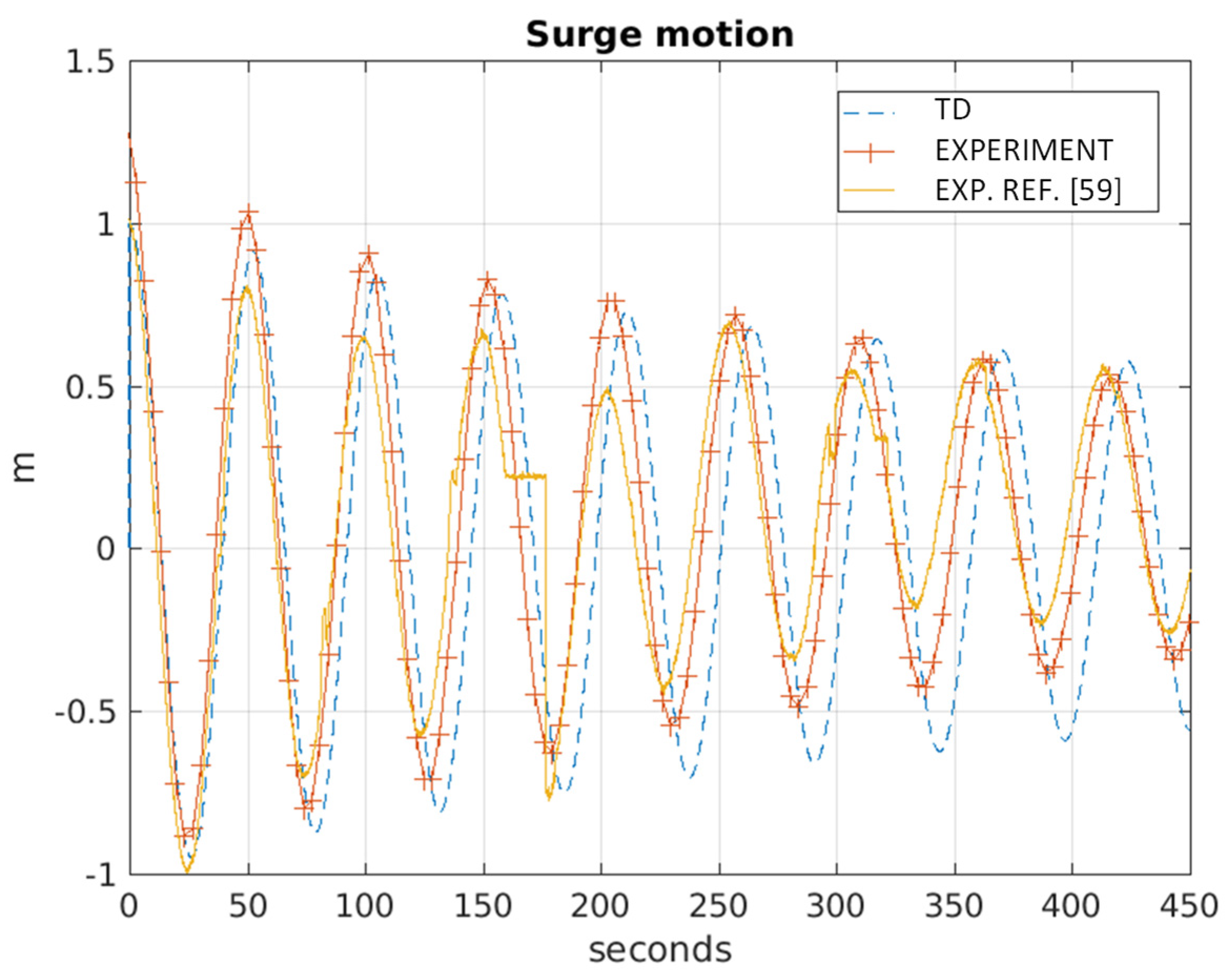
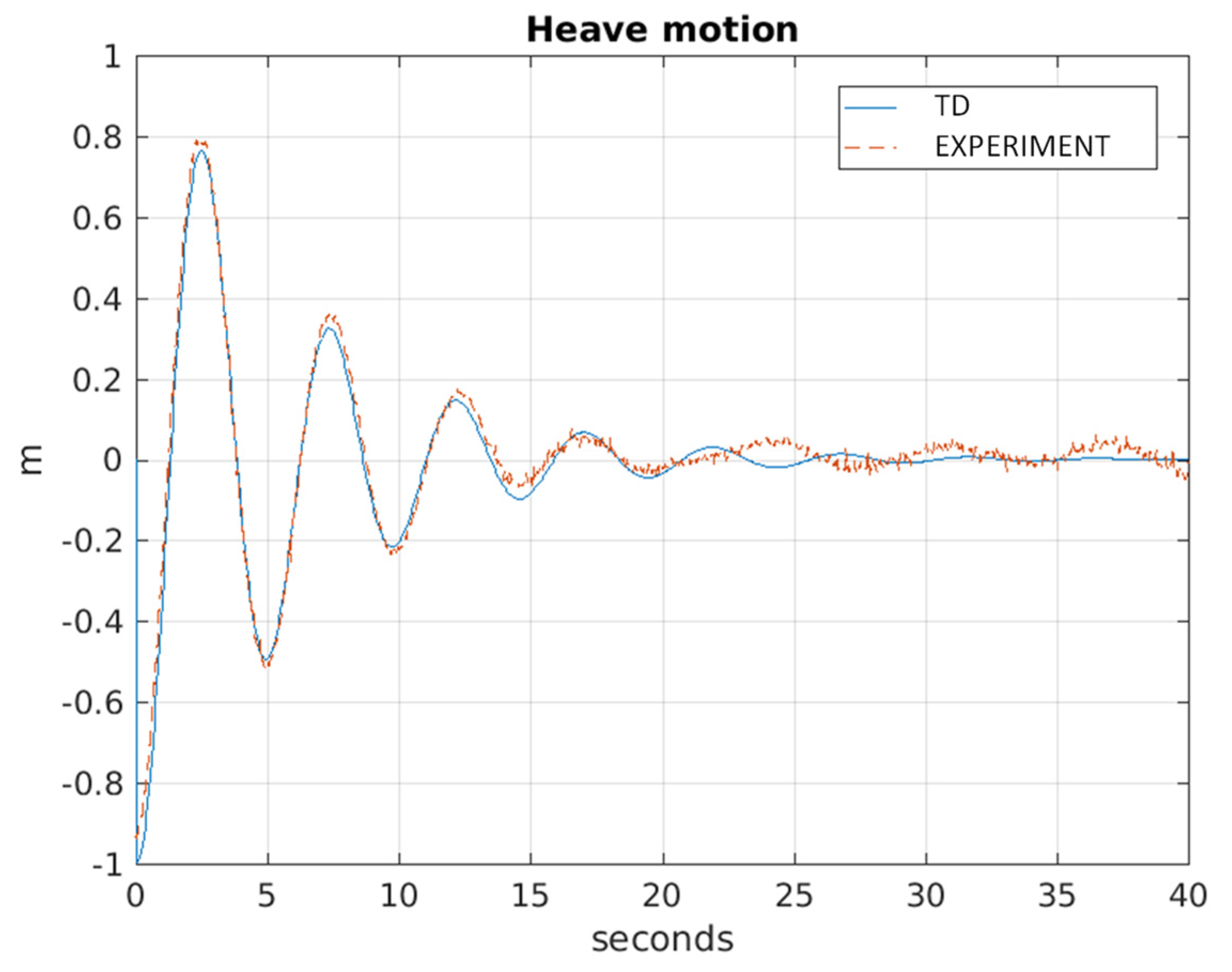
3.1. Qualitative Assessment
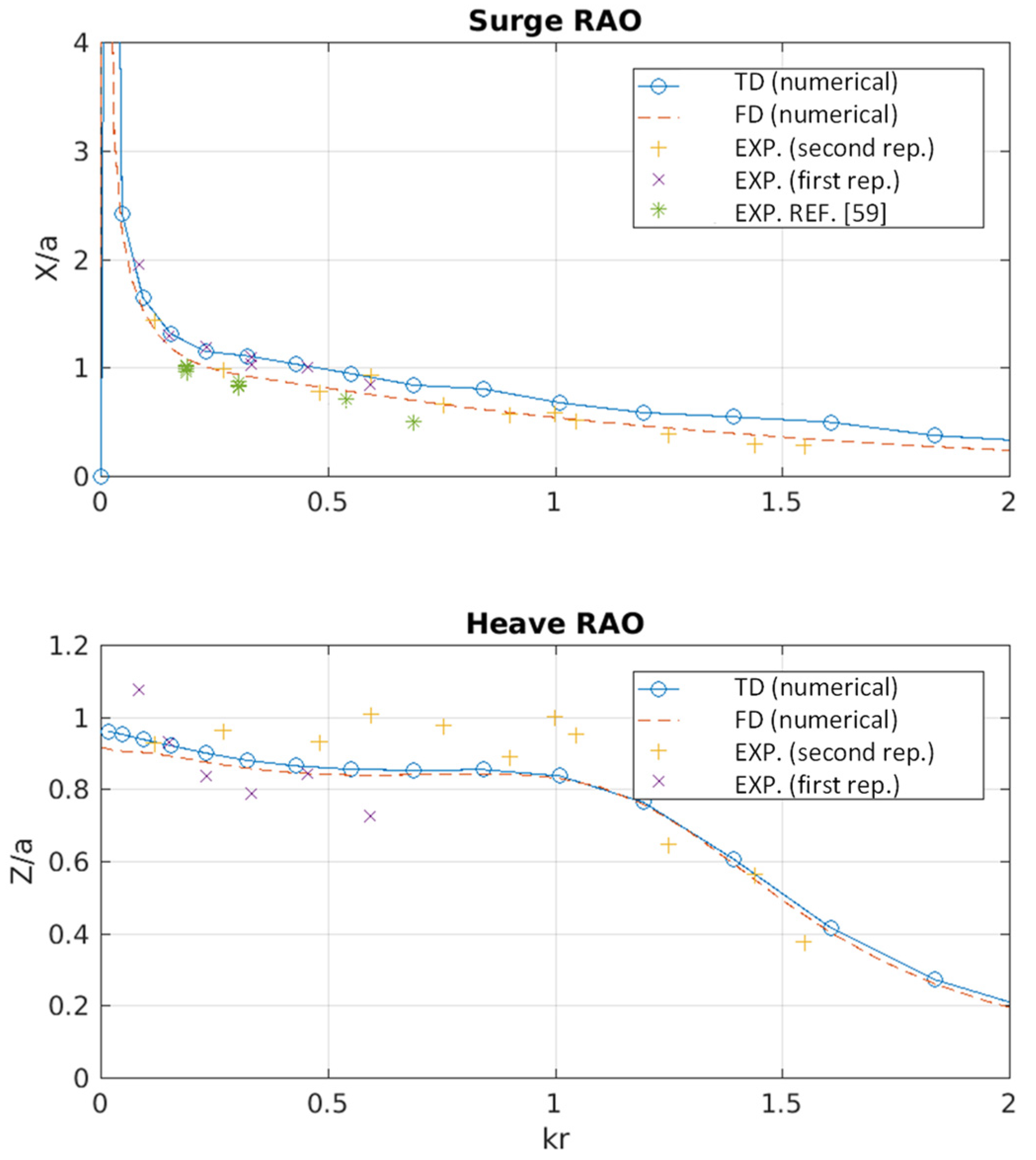
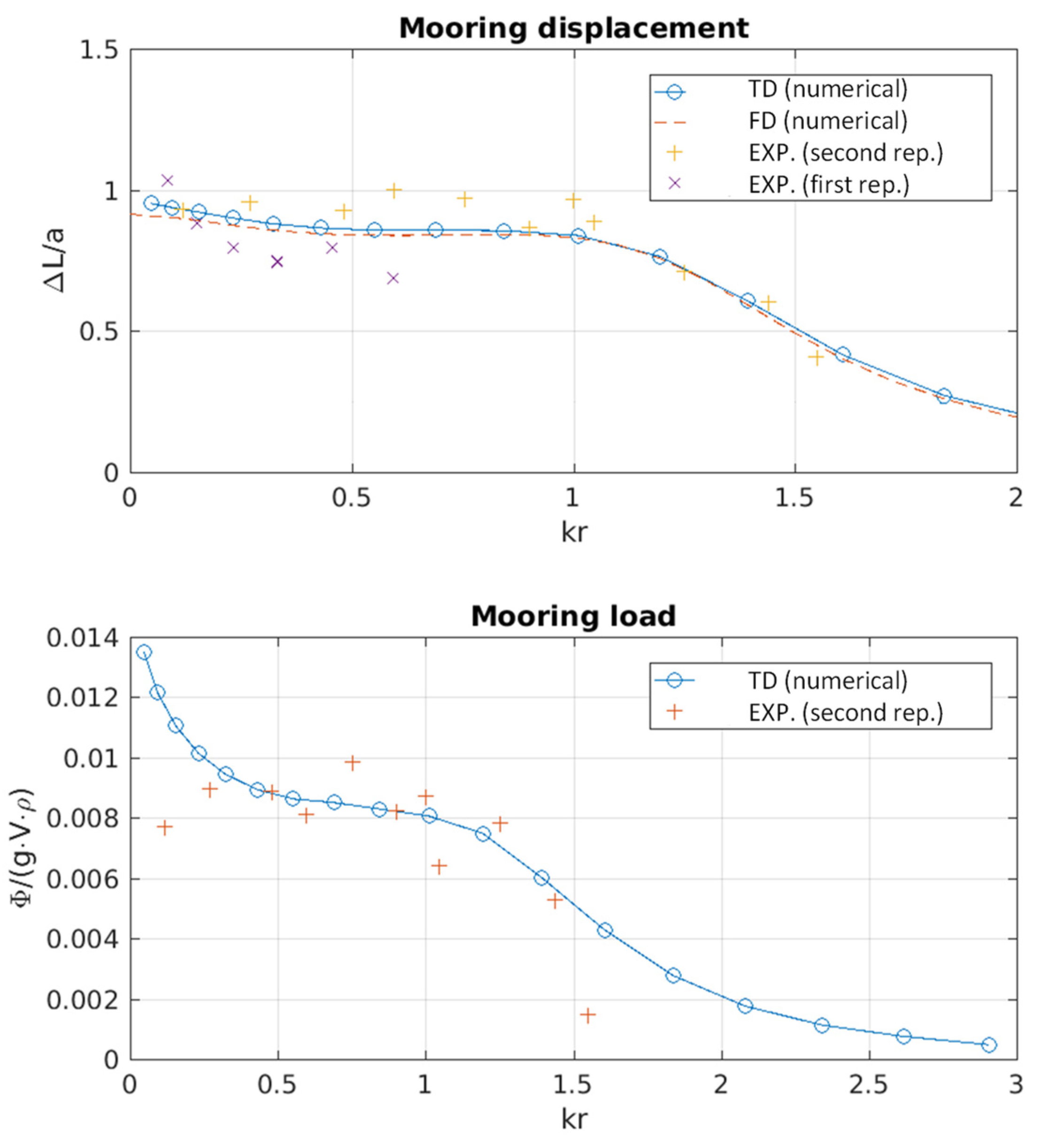
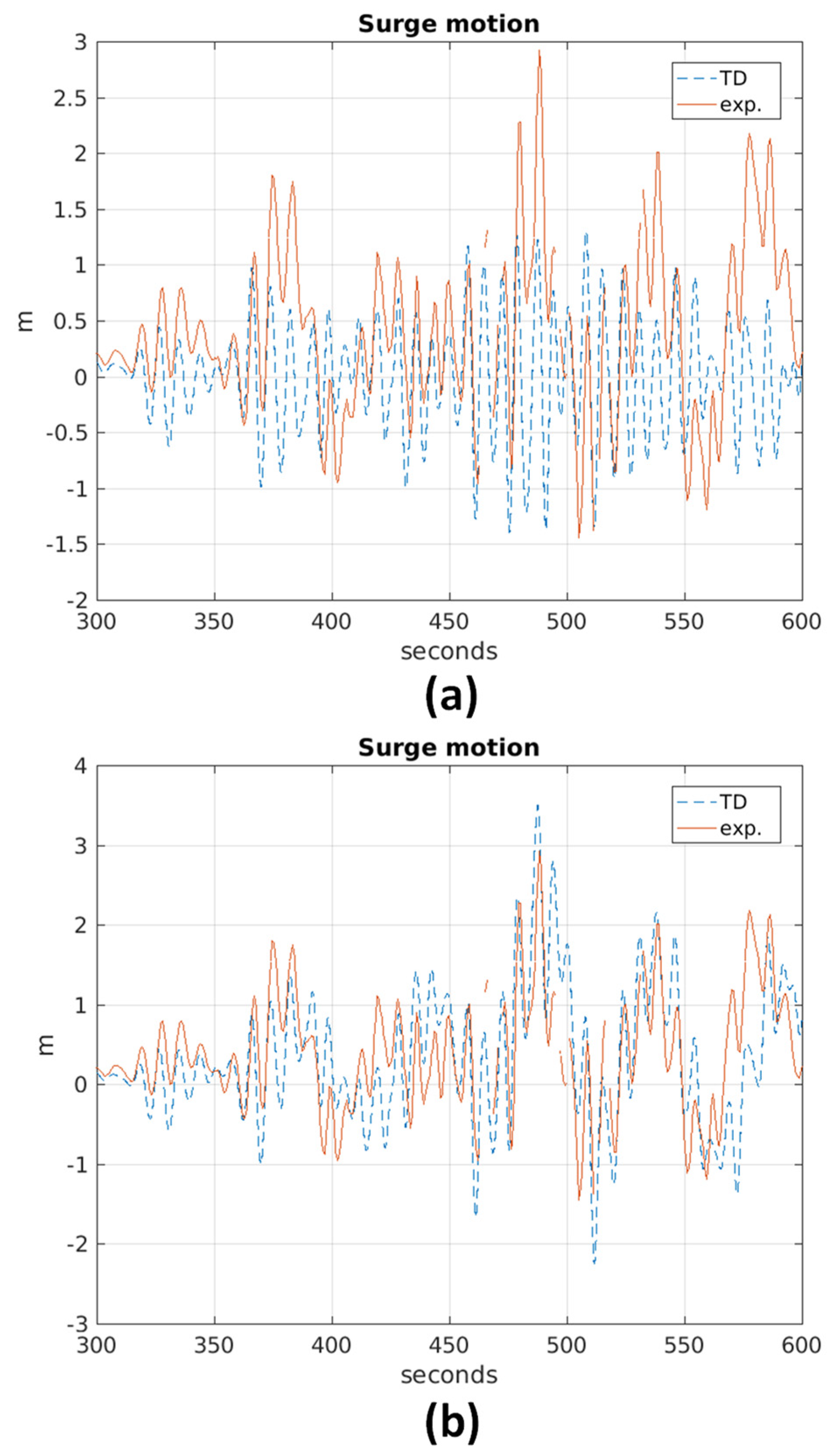
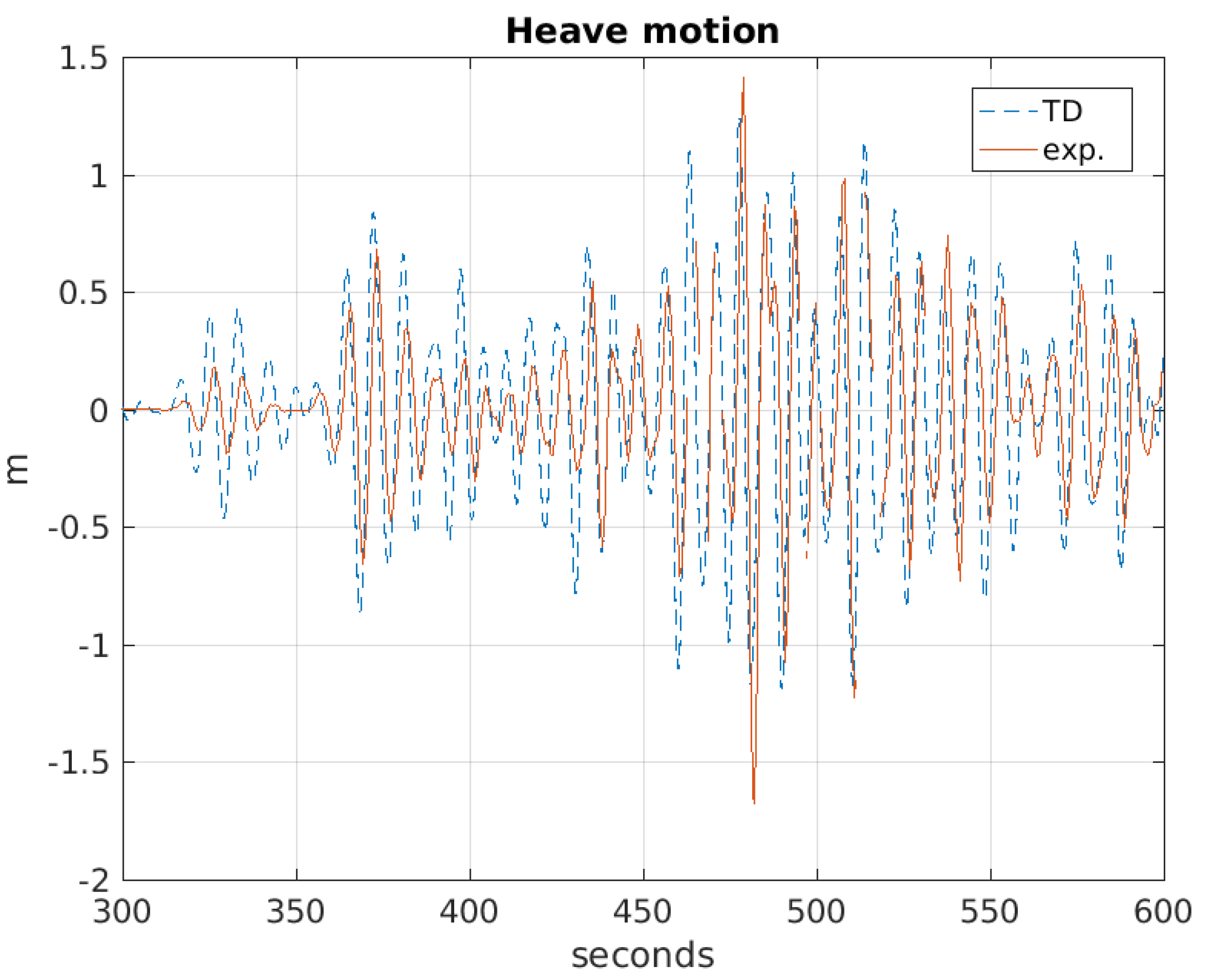
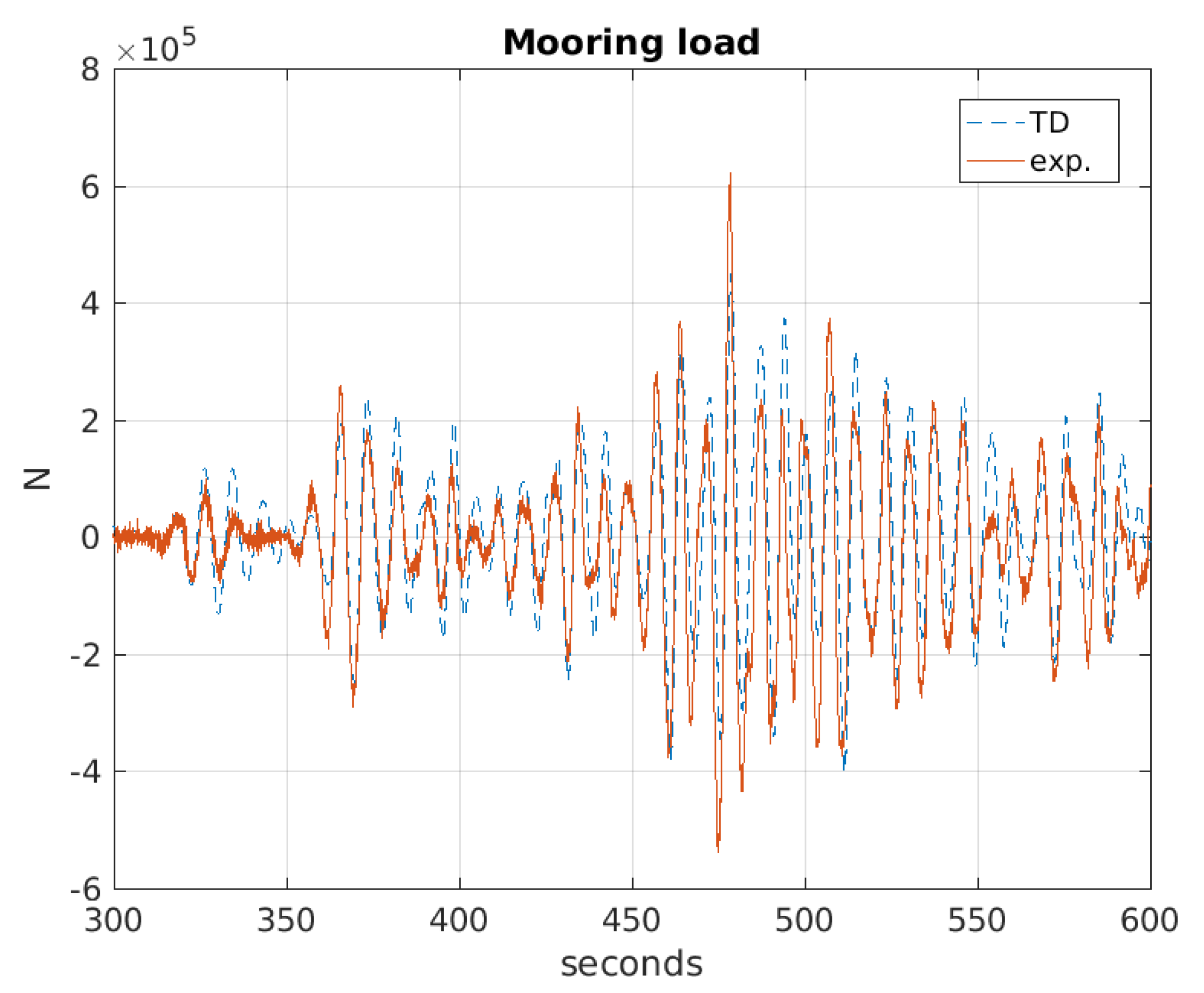
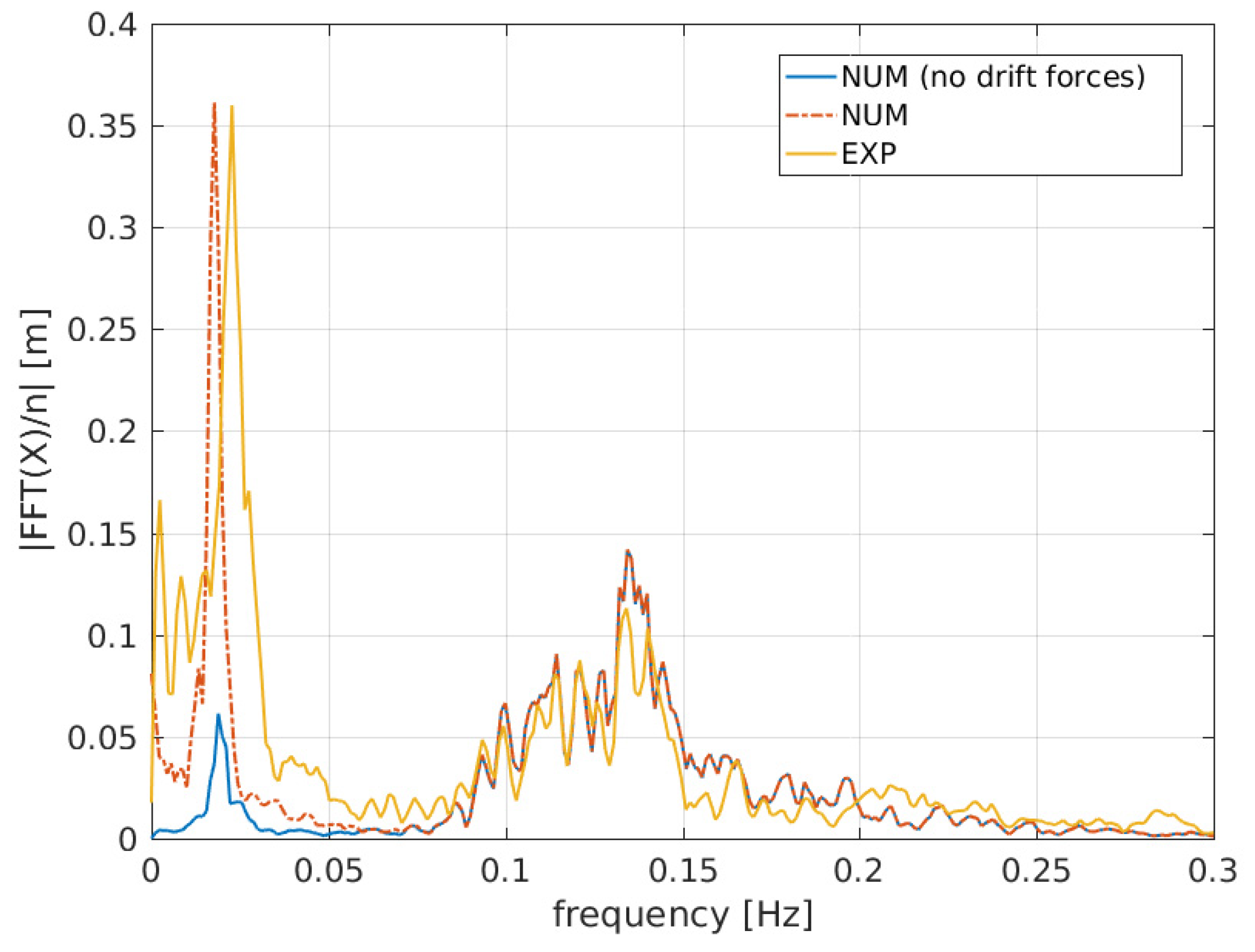
3.2. Validation with Experimental Data
3.3. Uncertainty Analysis Results
3.4. Discussion
- The mooring line is assumed to be inelastic. The only axial mooring displacement is due to the extension of the spring component. Depending on the material used, for a real installation, the mooring component elongation might be an important factor that needs to be investigated;
- Viscous forces are neglected. Note that for the typical size of wave power devices, operating in normal sea conditions, the viscous forces usually are significantly less than the first-order wave loads. The proposed methodology is not intended to be used for modelling the device for studying survivability of sea states conditions when, eventually, viscous effects are more significant. Moreover, to precisely estimate power absorption for relatively small devices at resonance conditions, viscous forces might be an important contribution;
- For simplicity, the mooring line is assumed to be attached to the center. In practice, this is not possible. However, due to the spherical shape considered and having assumed no viscous forces, it was possible to implement such simplification;
- The PTO system is modelled as a linear damping mechanism for which a single PTO damping coefficient can be set. The model, if appropriately extended, could be suitable for analyzing different, more complex types of PTO models, such as the hydraulic, phase-controlled systems, latching control or a combination of these.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gunn, K.; Stock-Williams, C. Quantifying the global wave power resource. Renew. Energy 2012, 44, 296–304. [Google Scholar] [CrossRef]
- Giannini, G. Modelling and Feasibility Study on Using Tidal Power with an Energy Storage Utility for Residential Needs. Inventions 2019, 4, 11. [Google Scholar] [CrossRef] [Green Version]
- Todeschini, G. Review of Tidal Lagoon Technology and Opportunities for Integration within the UK Energy System. Inventions 2017, 2, 14. [Google Scholar] [CrossRef] [Green Version]
- Charlier, R.H.; Justus, J.R. (Eds.) Chapter 5 waves. In Elsevier Oceanography Series; Elsevier: Amsterdam, The Netherlands, 1993; pp. 105–185. ISBN 0422-9894. [Google Scholar] [CrossRef]
- Heath, T.V. A review of oscillating water columns. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2012, 370, 235–245. [Google Scholar] [CrossRef] [Green Version]
- Portillo, J.; Collins, K.; Gomes, R.; Henriques, J.; Gato, L.; Howey, B.; Hann, M.; Greaves, D.; Falcão, A. Wave energy converter physical model design and testing: The case of floating oscillating-water-columns. Appl. Energy 2020, 278, 115638. [Google Scholar] [CrossRef]
- Giannini, G.; López, M.; Ramos, V.; Rodríguez, C.A.; Rosa-Santos, P.; Taveira-Pinto, F. Geometry assessment of a sloped type wave energy converter. Renew. Energy 2021, 171, 672–686. [Google Scholar] [CrossRef]
- Coiro, D.P.; Troise, G.; Calise, G.; Bizzarrini, N. Wave energy conversion through a point pivoted absorber: Numerical and experimental tests on a scaled model. Renew. Energy 2016, 87, 317–325. [Google Scholar] [CrossRef]
- Rosa-Santos, P.; Taveira-Pinto, F.; Teixeira, L.; Ribeiro, J. CECO wave energy converter: Experimental proof of concept. J. Renew. Sustain. Energy 2015, 7, 061704. [Google Scholar] [CrossRef]
- Sarkar, D.; Doherty, K.; Dias, F. The modular concept of the Oscillating Wave Surge Converter. Renew. Energy 2016, 85, 484–497. [Google Scholar] [CrossRef]
- Salter, S.H. The Solo Duck. 1982. Available online: http://www.homepages.ed.ac.uk/v1ewaveg/0-Archive/EWPP%20archive/1982%20EWPP%20The%20Solo%20Duck.pdf (accessed on 1 December 2019).
- Kofoed, J.P.; Frigaard, P.; Friis-Madsen, E.; Sørensen, H.C. Prototype testing of the wave energy converter wave dragon. Renew. Energy 2006, 31, 181–189. [Google Scholar] [CrossRef] [Green Version]
- Margheritini, L.; Vicinanza, D.; Frigaard, P. SSG wave energy converter: Design, reliability and hydraulic performance of an innovative overtopping device. Renew. Energy 2009, 34, 1371–1380. [Google Scholar] [CrossRef]
- Fernandez, H.; Iglesias, G.; Carballo, R.; Castro, A.; Fraguela, J.; Taveira-Pinto, F.; Sanchez, M. The new wave energy converter WaveCat: Concept and laboratory tests. Mar. Struct. 2012, 29, 58–70. [Google Scholar] [CrossRef]
- Faizal, M.; Ahmed, M.R.; Lee, Y.-H. A Design Outline for Floating Point Absorber Wave Energy Converters. Adv. Mech. Eng. 2014, 6. [Google Scholar] [CrossRef] [Green Version]
- Kolios, A.; Di Maio, L.F.; Wang, L.; Cui, L.; Sheng, Q. Reliability assessment of point-absorber wave energy converters. Ocean Eng. 2018, 163, 40–50. [Google Scholar] [CrossRef]
- Agyekum, E.; PraveenKumar, S.; Eliseev, A.; Velkin, V. Design and Construction of a Novel Simple and Low-Cost Test Bench Point-Absorber Wave Energy Converter Emulator System. Inventions 2021, 6, 20. [Google Scholar] [CrossRef]
- Falcão, A.F.D.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Carnegie Clean Energy. CETO. Available online: https://www.carnegiece.com/technology/ (accessed on 15 June 2020).
- Ocean Power Technology (OPT). Available online: https://oceanpowertechnologies.com/ (accessed on 25 September 2021).
- Osawa, H.; Washio, Y.; Ogata, T.; Tsuritani, Y.; Nagata, Y. The Offshore Floating Type Wave Power Device “Mighty Whale” Open Sea TestsPerformance of The Prototype. In The Twelfth International Offshore and Polar Engineering Conference; International Society of Offshore and Polar Engineers: Kitakyushu, Japan, 2002; p. 6. [Google Scholar]
- Babarit, A.; Clément, A.; Ruer, J.; Tartivel, C. SEAREV: A Fully Integrated Wave Energy Converter; Ecole Centrale de Nantes: Nantes, France, 2006. [Google Scholar]
- Mattiazzo, G. State of the Art and Perspectives of Wave Energy in the Mediterranean Sea: Backstage of ISWEC. Front. Energy Res. 2019, 7, 114. [Google Scholar] [CrossRef] [Green Version]
- Boren, B.C.; Batten, B.A.; Paasch, R.K. Active control of a vertical axis pendulum wave energy converter. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 21 July 2014; ISBN 2378-5861. [Google Scholar] [CrossRef]
- AW-Energy. Available online: https://aw-energy.com/waveroller/ (accessed on 16 June 2020).
- Henry, A.; Power, U.A.; Doherty, K.; Cameron, L.; Doherty, R.; Whittaker, T. Advances in the Design of the Oyster Wave Energy Converter; Marine Renewable & Offshore Wind Energy, RINA HQ: London, UK, 2010. [Google Scholar]
- Johanning, L.; Smith, G.H.; Wolfram, J. Mooring design approach for wave energy converters. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2006, 220, 159–174. [Google Scholar] [CrossRef]
- Barltrop, N.D.P. Floating Structures: A Guide for Design and Analysis; Oilfield Publications: Ledbury, UK, 1998; Volume 1–2. [Google Scholar]
- Rahman, A.; Farrok, O.; Islam, R.; Xu, W. Recent Progress in Electrical Generators for Oceanic Wave Energy Conversion. IEEE Access 2020, 8, 138595–138615. [Google Scholar] [CrossRef]
- Farrok, O.; Islam, R.; Sheikh, R.I.; Guo, Y.; Zhu, J.; Lei, G. Oceanic Wave Energy Conversion by a Novel Permanent Magnet Linear Generator Capable of Preventing Demagnetization. IEEE Trans. Ind. Appl. 2018, 54, 6005–6014. [Google Scholar] [CrossRef]
- Kiran, M.R.; Farrok, O.; Mamun, A.-A.; Islam, R.; Xu, W. Progress in Piezoelectric Material Based Oceanic Wave Energy Conversion Technology. IEEE Access 2020, 8, 146428–146449. [Google Scholar] [CrossRef]
- Molla, S.; Farrok, O.; Rahman, A.; Bashir, S.; Islam, R.; Kouzani, A.Z.; Mahmud, M.A.P. Increase in Volumetric Electrical Power Density of a Linear Generator by Winding Optimization for Wave Energy Extraction. IEEE Access 2020, 8, 181605–181618. [Google Scholar] [CrossRef]
- Beatty, S.J.; Hall, M.; Buckham, B.J.; Wild, P.; Bocking, B. Experimental and numerical comparisons of self-reacting point absorber wave energy converters in regular waves. Ocean Eng. 2015, 104, 370–386. [Google Scholar] [CrossRef]
- Shadman, M.; Avalos, G.O.G.; Estefen, S.F. On the power performance of a wave energy converter with a direct mechanical drive power take-off system controlled by latching. Renew. Energy 2021, 169, 157–177. [Google Scholar] [CrossRef]
- Wu, J.; Yao, Y.; Zhou, L.; Göteman, M. Real-time latching control strategies for the solo Duck wave energy converter in irregular waves. Appl. Energy 2018, 222, 717–728. [Google Scholar] [CrossRef]
- Cruz, J.M.B.P.; Sarmento, A.J.N.A. Time domain simulations on a single point moored submerged sphere of variable radius. In Proceedings of the 24th International Conference on Offshore Mechanics and Arctic Engineering, Halkidiki, Greece, 12–17 June 2005. [Google Scholar]
- Vicente, P.V.; Falcão, A.F.O.; Justino, P.A.P. Nonlinear dynamics of a tighly moored point-absorber wave energy converter. Ocean Eng. 2013, 59, 20–36. [Google Scholar] [CrossRef] [Green Version]
- Mavrakos, S.A.; Katsaounis, M.G. Parametric evaluation of the performance characteristics of tight moored wave energy converters. In Proceedings of the 24th International Conference on Offshore Mechanics and Arctic Engineering, Halkidiki, Greece, 12–17 June 2005. [Google Scholar]
- Mavrakos, S.A.; Katsaounis, G.M.; Apostolidis, M.S. Effects of floaters’ geometry on the performance characteristics of a tighly moored wave energy converters. In Proceedings of the ASME 2009 28th International Conference on Ocean, Offshore and Arctic Engineering, Honolulu, HI, USA, 31 May–5 June 2009. [Google Scholar]
- Spanos, P.D.; Arena, F.; Richichi, A.; Malara, G. Efficient Dynamic Analysis of a Nonlinear Wave Energy Harvester Model. J. Offshore Mech. Arct. Eng. 2016, 138, 041901. [Google Scholar] [CrossRef]
- Giannini, G.; Temiz, I.; Rosa-Santos, P.; Shahroozi, Z.; Ramos, V.; Göteman, M.; Engström, J.; Day, S.; Taveira-Pinto, F. Wave Energy Converter Power Take-Off System Scaling and Physical Modelling. J. Mar. Sci. Eng. 2020, 8, 632. [Google Scholar] [CrossRef]
- Hann, M.; Greaves, D.; Raby, A. Snatch loading of a single taut moored floating wave energy converter due to focused wave groups. Ocean Eng. 2015, 96, 258–271. [Google Scholar] [CrossRef] [Green Version]
- Orszaghova, J.; Rafiee, A.; Wolgamot, H.; Draper, S.; Taylor, P.H. Experimental Study of Extreme Responses of a Point Absorber Wave Energy Converter. In Proceedings of the 20th Australasian Fluid Mechanics Conference, Perth, Australia, 5–8 December 2016. [Google Scholar]
- Radhakrishnan, S.; Datla, R.; Hires, R.I. Theoretical and experimental analysis of tethered buoy instability in gravity waves. Ocean Eng. 2007, 34, 261–274. [Google Scholar] [CrossRef]
- Gunn, D.F.; Rudman, M.; Cohen, R. Wave interaction with a tethered buoy: SPH simulation and experimental validation. Ocean Eng. 2018, 156, 306–317. [Google Scholar] [CrossRef]
- Wang, W.; Wu, M.; Palm, J.; Eskilsson, C. Estimation of numerical uncertainty in CFD simulations of a passively controlled wave energy converter. J. Eng. Marit. Environ. 2018, 232, 71–84. [Google Scholar]
- Ding, B.; Souza, L.; Silva, P.; Sergiienko, N.; Meng, F.; Piper, J.; Bennetts, L.; Wagner, M.; Cazzolato, B.; Arjomandi, M. Study of fully submerged point absorber wave energy converter—Modelling, simulation and scaled experiment. In Proceedings of the 32nd International Workshop on Water Waves and Floating Bodies, Dalian, China, 23–26 April 2017. [Google Scholar]
- Cummins, W.E. The impulse response function and ship motions. In Proceedings of the Report 1661 of the, Symposium on Ship Theory at the Institut für Schiffbau der Universität, Hamburg, Germany, 25–27 January 1962. [Google Scholar]
- Ogilvie, T.F. Recent Progress toward the Understanding and Prediction of Ship Motions. 1964. Available online: https://repository.tudelft.nl/ (accessed on 24 June 2021).
- Babarit, A. Nemoh—Website. 2014. Available online: https://lheea.ec-nantes.fr/research-impact/software-and-patents/nemoh-presentation (accessed on 24 June 2021).
- Babarit, A.; Delhommeau, G. Theoretical and numerical aspects of the open source BEM solver NEMOH. In Proceedings of the 11th European Wave and Tidal Energy Conference (EWTEC2015), Nantes, France, 6–11 September 2015. [Google Scholar]
- Journee, J.M.J.; Massie, W.W. Offshore Hydromechanics. Delf University of Technology, Netherlands. 2001. Available online: https://ocw.tudelft.nl/wp-content/uploads/OffshoreHydromechanics_Journee_Massie.pdf (accessed on 10 October 2020).
- Falnes, J. Ocean Waves and Oscillating Systems; Cambridge University Press: Cambridge, UK, 2002. [Google Scholar]
- Hsu, F.H.; Blenkarn, K.A. Analysis of Peak Mooring Forces Caused by Slow Vessel Drift Oscillations in Random Seas. Soc. Pet. Eng. J. 1972, 12, 329–344. [Google Scholar] [CrossRef]
- Remery, G.F.M.; Hermans, A.J. The Slow Drift Oscillations of a Moored Object in Random Seas. Soc. Pet. Eng. J. 1972, 12, 191–198. [Google Scholar] [CrossRef]
- UoStrath—Kelvin Hydrodynamics Laboratory (Formerly Acre Road Wave and Tow Tank). Available online: http://130.159.19.247/engineering/navalarchitectureoceanmarineengineering/workingwithbusinessorganisations/ourfacilities/kelvinhydrodynamicslaboratory/ (accessed on 10 October 2021).
- ITTC. Uncertainty Analysis for a Wave Energy Converter. Part of the ITTC Quality System Manual—Recommended Procedures and Guidelines. 2017. Available online: https://www.ittc.info/media/8135/75-02-07-0312.pdf (accessed on 10 October 2021).
- ITTC. Uncertainty Analysis, Instrument Calibration. In Proceedings of the ITTC Quality System Manual Recommended Procedures and Guidelines. 2017. Available online: https://www.ittc.info/media/7979/75-01-03-01.pdf (accessed on 10 October 2021).
- Giannini, G. Mooring Analysis and Design for Wave Energy Converters; University of Strathclyde Online Library: Glasgow, UK, 2018. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrument | Measurement | Range | Unit |
|---|---|---|---|
| Motion capture system | Floater displacement | 0–500 | mm |
| Standard wave probe | Free-surface elevation | 0–150 | mm |
| Sonic wave probe | Free-surface elevation upstream | 0–150 | Mm |
| Load cell | Mooring tension | 0–50 | N |
| Laser sensor | Mooring line displacement | 0–350 | Mm |
| Motor tachometer | Mooring line displacement | 0–350 | mm |
| Parameter | Model Scale (1:33) | Real Scale (1:1) | Unit |
|---|---|---|---|
| Floater radius | m | ||
| Floater mass | kg | ||
| Water depth | m | ||
| Mooring line length | m | ||
| Spring stiffness | N/m | ||
| Cpto damping | kg/s | ||
| Mooring pretension | N |
| ω (rad/s) | 0.40 | 0.46 | 0.53 | 0.59 | 0.66 | 0.72 | 0.79 | 0.86 | 0.92 | 0.99 | 1.05 | 1.12 | 1.18 | 1.25 | 1.31 |
| Crefl | 0.10 | 0.11 | 0.15 | 0.25 | 0.30 | 0.35 | 0.40 | 0.45 | 0.45 | 0.50 | 0.50 | 0.55 | 0.60 | 0.70 | 1.00 |
| Units | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Waves Characteristics | Ampl. | (mm) | 30 | 30 | 60 | 30 | 30 | 60 | 30 | 30 | 60 | |
| Freq. | (rad/s) | 2.3 | 6.6 | 6.6 | 2.3 | 6.6 | 6.6 | 2.3 | 6.6 | 6.6 | ||
| Heave | Ampl. (mm) | 0.763 | 1.545 | 2.39 | 0.8 | 1.105 | 1.74 | 2.52 | 4.753 | 7.482 | 10.838 | |
| Freq. (rad/s) | 0.002 | 0.008 | 0.004 | 0.002 | 0.008 | 0.004 | 0.008 | 0.036 | 0.018 | |||
| Surge | Ampl. (mm) | 0.66 | 0.123 | 0.31 | 0.8 | 1.037 | 0.809 | 0.858 | 4.46 | 3.481 | 3.69 | |
| Freq. (rad/s) | 0.005 | 0.017 | 0.003 | 0.005 | 0.017 | 0.003 | 0.021 | 0.073 | 0.013 | |||
| Direct meas. | Wave probe | Ampl. (mm) | 0.891 | 0.341 | 2.099 | 0.7 | 1.133 | 0.779 | 2.213 | 4.873 | 3.349 | 9.516 |
| Freq. (rad/s) | 0.002 | 0.004 | 0.003 | 0.002 | 0.004 | 0.003 | 0.009 | 0.016 | 0.013 | |||
| Load | Ampl. (N) | 0.056 | 0.119 | 0.138 | 0.015 | 0.058 | 0.12 | 0.138 | 0.25 | 0.517 | 0.595 | |
| Freq. (rad/s) | 0.001 | 0.007 | 0.004 | 0.001 | 0.007 | 0.004 | 0.006 | 0.031 | 0.016 | |||
| Displacement | Ampl. (mm) | 0.822 | 1.73 | 2.176 | 0.85 | 1.183 | 1.927 | 2.336 | 5.085 | 8.288 | 10.044 | |
| Freq. (rad/s) | 0.002 | 0.006 | 0.003 | 0.002 | 0.006 | 0.003 | 0.007 | 0.028 | 0.011 | |||
| Sim. of PTO | PTO damping | (kg/s) | 1.473 | 1.473 | 1.473 | 1.473 | NA | NA | NA | |||
| Spring stiffness | (N/m) | 13.212 | 13.212 | 13.212 | 13.212 | NA | NA | NA | ||||
| Mass of floater | (kg) | 0.005 | 0.005 | 0.005 | 0.005 | NA | NA | NA | ||||
| Fixed param. | Radius of floater | (mm) | 0.8 | 0.8 | 0.8 | 0.8 | NA | NA | NA | |||
| Length of line | (mm) | 6 | 6 | 6 | 6 | NA | NA | NA | ||||
| Pretension | (N) | 0.056 | 0.119 | 0.138 | 0.015 | 0.058 | 0.12 | 0.183 | 0.25 | 0.517 | 0.786 | |
| Indirect meas. | Power | (W) | 0.03 | 0.328 | 1.221 |
| Test No.: | 12 | 25 | 35 | 38 | 53 | ||
|---|---|---|---|---|---|---|---|
| Heave | Ampl. (mm) | 29.527 | 28.476 | 30.847 | 30.782 | 31.258 | 0.728 |
| Freq. (rad/s) | 4.585 | 4.608 | 4.588 | 4.58 | 4.594 | 0.007 | |
| Surge | Ampl. (mm) | 26.168 | 23.079 | 24.98 | 26.281 | 25.295 | 0.816 |
| Freq. (rad/s) | 4.643 | 4.524 | 4.589 | 4.55 | 4.592 | 0.029 | |
| Wave probe | Ampl. (mm) | 33.027 | 34.506 | 34.02 | 32.872 | 33.884 | 0.438 |
| Freq. (rad/s) | 4.596 | 4.609 | 4.594 | 4.592 | 4.594 | 0.004 | |
| Load | Ampl. (N) | 2.156 | 2.067 | 2.248 | 2.249 | 2.278 | 0.055 |
| Freq. (rad/s) | 4.588 | 4.604 | 4.589 | 4.578 | 4.594 | 0.006 | |
| Displacement | Ampl. (mm) | 29.732 | 28.305 | 30.742 | 30.927 | 31.253 | 0.758 |
| Freq. (rad/s) | 4.587 | 4.603 | 4.589 | 4.578 | 4.594 | 0.006 |
| Quantity | Total bias (±%) | |
|---|---|---|
| Heave | ampl. | 21.41 |
| phase | 0.55 | |
| Surge | ampl. | 20.68 |
| phase | 1.11 | |
| Wave probe | ampl. | 10.76 |
| phase | 0.25 | |
| Load | ampl. | 20.36 |
| phase | 0.47 | |
| Displacement | ampl. | 24.27 |
| phase | 0.42 | |
| Power | ampl. | 64.45 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giannini, G.; Day, S.; Rosa-Santos, P.; Taveira-Pinto, F. A Novel 2-D Point Absorber Numerical Modelling Method. Inventions 2021, 6, 75. https://doi.org/10.3390/inventions6040075
Giannini G, Day S, Rosa-Santos P, Taveira-Pinto F. A Novel 2-D Point Absorber Numerical Modelling Method. Inventions. 2021; 6(4):75. https://doi.org/10.3390/inventions6040075
Chicago/Turabian StyleGiannini, Gianmaria, Sandy Day, Paulo Rosa-Santos, and Francisco Taveira-Pinto. 2021. "A Novel 2-D Point Absorber Numerical Modelling Method" Inventions 6, no. 4: 75. https://doi.org/10.3390/inventions6040075