
Study of Resistance to Disturbances of the Main Types of Communication Systems on Board Military Ships Used during Interception or Search and Rescue Missions



Abstract
:1. Introduction
2. Materials and Methods
2.1 Technical—Organizational Details
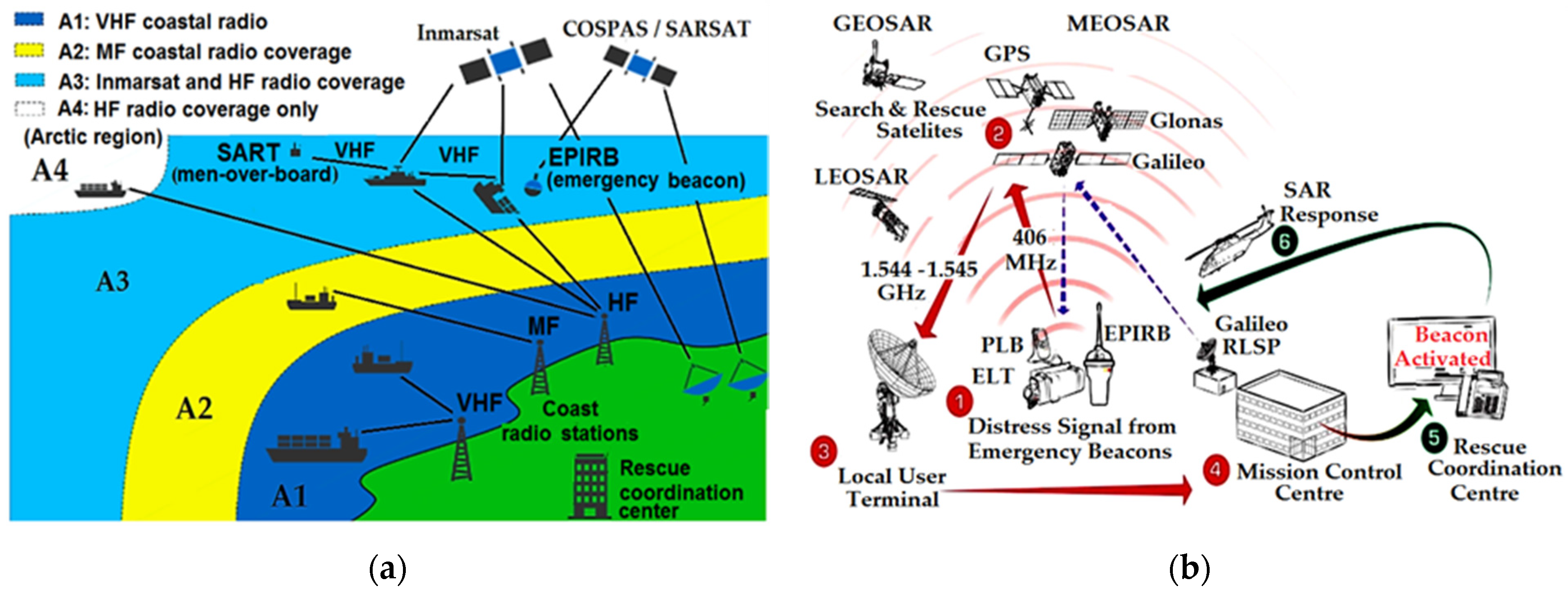
- Sea area A1 is defined as the area covered by VHF radio enabling Digital Selective Calling (DSC) and Radio Telephone (RT)—up to 20–30 nautical miles from shore;
- Sea area A2—covered by MF radio, also enabling DSC and RT—up to about 150 nautical miles from shore;
- Sea area A3 is covered by HF radio and Inmarsat geostationary satellite enabling DSC and satellite communications—global area between 70° N and 70° S;
- Sea area A4 is comprising polar regions above 70° N and below 70° S and is covered by radio communications in the HF radio range with DSC.

- 121.5 MHz and 243 MHz with the use of emission class A3X (amplitude modulated with full carrier and both sidebands) with a modulation factor between 85 and 100%, not allowing overmodulation and N0N. The carrier must be identifiable separately from the 2 sidebands and the level of its carrier must be at least 30% above the sidebands. During the A3X broadcast, depending on the mode of variation of the audio signals that modulate the carrier, a distinction can be made between EPIRB, ELT, PLB or MSLD [18];
- 406.025 MHz using G1B emission class (phase modulation using ± 1.1 + 0.1 radians peak, referenced to an unmodulated carrier) for satellite emergency position indicating radio beacons [19];
- 156.525 MHz for EPIRBs operating on VHF Channel 70 (G2B).
2.2 Theoretical Considerations
2.2.1. Formulation of the Problem
2.2.2. Determining the IFD for Emission Classes A3X
2.2.3. Determining the IFD for Emission Classes J3E and J2B
2.2.4. Determining the IFD for Emission Classes G3E, G2B and G1B
2.2.5. Determining the IFD for Emission Classes F1B and F2B
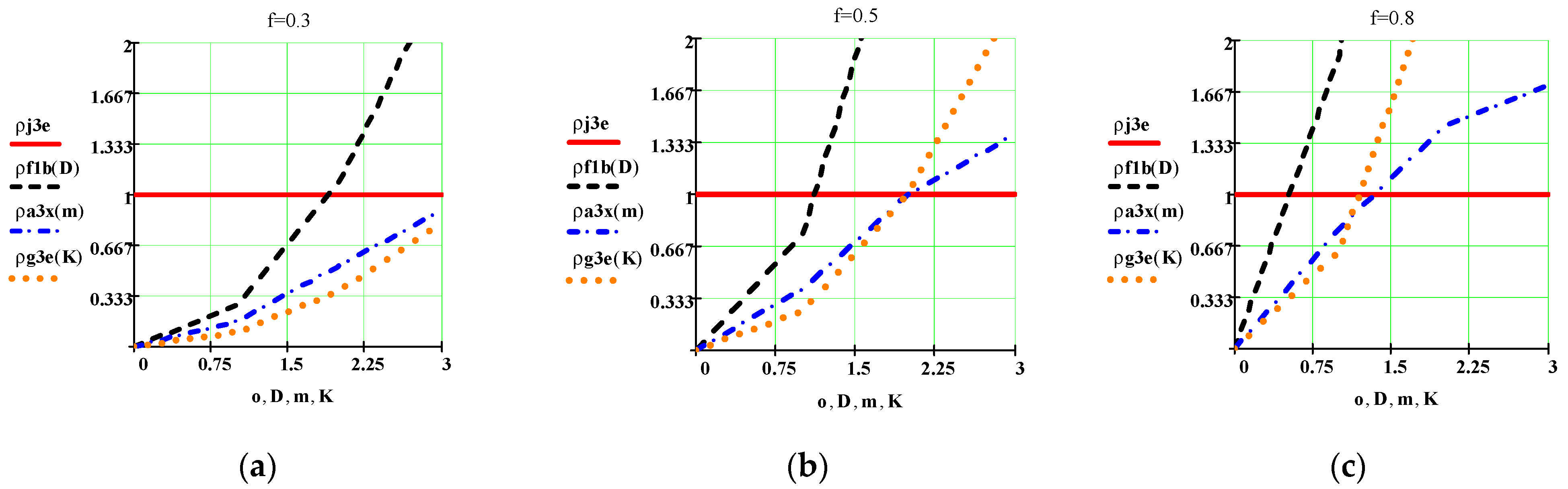
2.2.6. Comparison of IFD (with the Use of Mathcad)
- IFDs are constant and do not depend on the parameters of the modulating signal or of the modulation stage only for the analysed emission classes J3E and J2B;
- For small values of the standard modulator signal power, of the slope of the phase modulator for G3E and of the deviation ratio for F1B (default for small occupied bandwidths), IFD for emission classes J3E and J2B are clearly superior to all other classes. Additionally, in this case, the superiority of IFD of A3X class over those of G3E, G2B and G1B is found;
- A constant IFD of 1 for J3E and J2B could mean that we can recover the signal even if its power is equal to the noise power; thus, it is not depending on the standard modulating signal power, which gives these emission classes a special stability to disturbances;
- For the emission classes G3E, G2B G1B, and especially for F1B, F2B, IFD classes, the obtained values are much higher than those of the other classes, but only for high values of the normalized modulation signal power, and of the deviation ratio or the phase modulator slope, respectively, which rise as the modulated signal band increases.
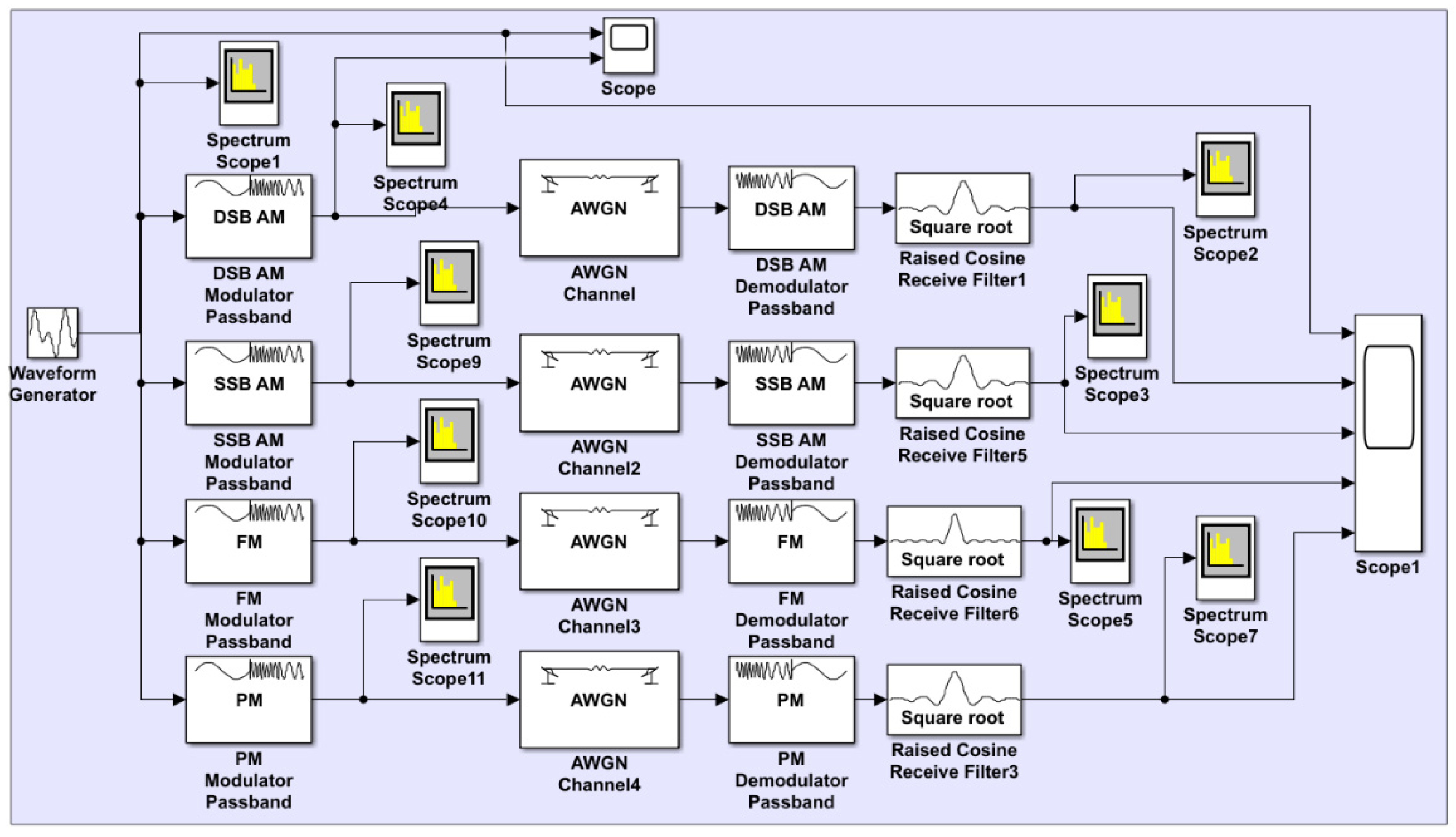
2.3. Verification of Results Using the Matlab—Simulink Simulation Program
3. Results and Discussion
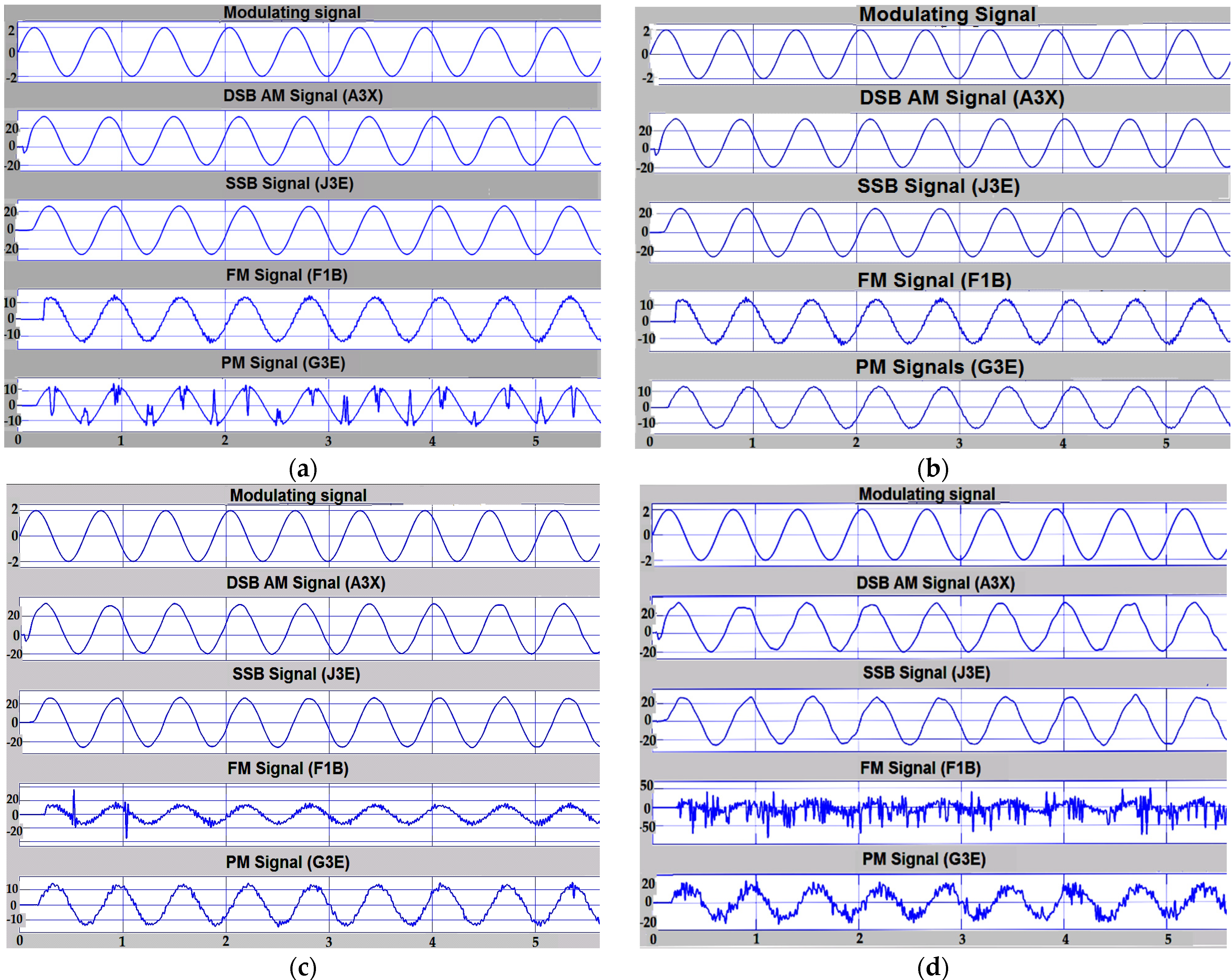
- Emission classes that use phase modulation have been shown to be more resistant to interference when a π/3 phase deviation has been used, which is much more resistant than those that use frequency modulation.
- For emission classes using frequency modulation, at SNR values below 10 dB (considered to be the full improvement threshold) the actual signal shape can no longer be recognized—the effect of signal captured by noise occurs.
- Emission classes using DSB AM showed similar resistance to disturbance using SSB AM, so that, for both, the useful signal can be recognized even in the conditions of an SNR of −3 dB.
4. Conclusions
- The constructive simplicity of the radio stations that use it;
- Resistance to disturbances;
- Very small occupied bandwidth, (default and lower transmission power);
- Efficient use of the electromagnetic spectrum;
- Propagation of HF waves at very long distances and on multiple paths, which leads to the summation at the input terminals of the receiver of both the multiple signals from the transmitter being worked with and from other transmitters;
- The multitude of users of this range and the very high requirement of allocated frequencies/channels.
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Australian Global Maritime Distress and Safety System (GMDSS) Handbook 2018, 11th ed.; Australian Maritime Safety Authority (AMSA): Braddon, Australia, 2018.
- International Convention for the Safety of Life at Sea (SOLAS); International Maritime Organization (IMO): London, UK, 1974; Available online: https://www.imo.org/en/About/Conventions/Pages/International-Convention-for-the-Safety-of-Life-at-Sea-(SOLAS) (accessed on 10 March 2021).
- Brief History of IMO; International Maritime Organization (IMO): London, UK, 2019; Available online: https://www.imo.org/en/About/HistoryOfIMO/Pages/Default.aspx (accessed on 10 March 2021).
- Modern Maritime Communications. In Proceedings of the 29th World Radiocommunications Seminar, Online, 30 November–11 December 2020; Available online: https://www.itu.int/en/ITU-R/seminars/wrs/2020/ (accessed on 10 March 2021).
- SOLAS (Safety of Life at Sea) New or Upcoming Requirements; Lloid’s Register: London, UK, 2021; Available online: https://www.lr.org/en/solas/ (accessed on 24 April 2021).
- Raulefs, R.; Wang, W. Radio Spectrum Scarcity for Maritime Communication and Navigation Systems. In Proceedings of the 2021 IEEE 4th International Conference on Electronic Information and Communication Technology (ICEICT), Xi’an, China, 18–20 August 2021; pp. 588–591. [Google Scholar] [CrossRef]
- Gradiant. The Digitalisation of Maritime Communications; Gradiant: Vigo, Spain, 2019. [Google Scholar]
- John, O.; Reinmann, M. Increasing Quality of Maritime Communication through Intelligent Speech Recognition and Radio Direction Finding. In Proceedings of the European Navigation Conference ENC 2020, Dresden, Germany, 23–24 November 2020. [Google Scholar]
- A Comprehensive Guide to Maritime Cybersecurity, ©2021 Mission Secure. Available online: https://www.missionsecure.com/maritime-security-perspectives-for-a-comprehensive-approach (accessed on 24 April 2021).
- European Commission. Setting the World’s Radio Spectrum Rules. In Proceedings of the World Radiocommunication Conference, Sharm el-Sheikh, Egypt, 28 October–22 November 2019; Available online: https://ec.europa.eu/digital-single-market/en/world-radiocommunication-conference-setting-worlds-radio-spectrum-rules (accessed on 10 March 2021).
- ITU. Radio Regulations Articles, 2012 ed.; ITU: Geneva, Switzerland, 2012. [Google Scholar]
- ITU. Radio Regulations Appendices, 2016 ed.; ITU: Geneva, Switzerland, 2016. [Google Scholar]
- ITU. Final Acts WRC-15 World Radiocommunication Conference (GENEVA, 2015); ITU: Geneva, Switzerland, 2016. [Google Scholar]
- Sternula, Maritime Authority, Sternula ApS, Denmark. Available online: https://www.sternula.com/index.php/maritime-authorities/ (accessed on 24 April 2021).
- European Union Agency for the Space Programme. Search and Rescue (SAR)/Galileo Service. Available online: https://www.euspa.europa.eu/european-space/galileo/services/search-and-rescue-sar-galileo-service (accessed on 17 May 2021).
- European Standard. ETSI EN 300 338-1 V1.4.2 (2017-11)—Technical Characteristics and Methods of Measurement. Available online: https://www.etsi.org/deliver/etsi_en/300300_300399/30033801/01.04.02_60/en_30033801v010402p.pdf (accessed on 17 May 2021).
- Maritime Radio Transmitters and Receivers in the Band 156–162.5 MHz. Spectrum Management and Telecommunications Radio Standards Specification Industry Canada. Available online: https://www.ic.gc.ca/eic/site/smt-gst.nsf/vwapj/RSS182.pdf/$FILE/RSS182.pdf (accessed on 17 May 2021).
- RSS-287—Emergency Position Indicating Radio Beacons (EPIRB), Emergency Locator Transmitters (ELT), Personal Locator Beacons (PLB), and Maritime Survivor Locator Devices (MSLD); Government of Canada: Ottawa, ON, Canada, 2017.
- Specification for COSPAS-SARSAT 406 MHz Distress Beacons C/S T.001—Issue 4—Rev. 3; Cospas-Sarsat: Montreal, QC, Canada, 2018; Available online: http://www.cospas-sarsat.int/en/ (accessed on 17 May 2021).
- International Aeronautical and Maritime Search and Rescue Manual, Volume III, Mobile Facilities; International Maritime Organization: London, UK; International Civil Aviation Organization: Montréal, QC, Canada, 2016.
- Constantin, I.M.I. Transmisiuni Analogice şi Digitale; Editura Tehnică: Bucureşti, Romania, 1995. [Google Scholar]
- Ziemer, R.E.; Tranter, W.H. Principles of Communications, 7th ed.; Wiley: Hoboken, NJ, USA, 2014; Available online: https://it-ebooks.info/ (accessed on 19 May 2021).
- Carlson, A.; Crilly, P. Communication Systeems—An Introduction to Signals and Noise, 5th ed.; McGraw-Hill: New York, NY, USA, 2011. [Google Scholar]
- Agbo, S.O.; Sadiku, M.N.O. Principles of Modern Communication, 7-Systems Noise in Analog Communications; Cambridge University Press: Cambridge, UK, 2019. [Google Scholar]
- Safavi, H.; Hosseini, S.E. Optical SSB modulator/frequency shifter with ultralow spurious sidebands. Appl. Opt. 2020, 59, 7408–7418. [Google Scholar] [CrossRef] [PubMed]
- Zho, B.; Nai, W.; Ge, Y.; Xing, Y.; Zhu, H. Performance Analysis on Single Sideband Modulated Radio-Over-Fiber System Carrying Amplitude Shift Keying Signal with Different Duty Cycle. In Proceedings of the 2018 IEEE 9th International Conference on Software Engineering and Service Science (ICSESS), Beijing, China, 23–25 November 2018; Available online: https://ieeexplore.ieee.org/document/8663904 (accessed on 17 May 2021).
- Sampath, K.I.A.; Takano, K.; Maeda, J. Peak-to-Average Power Ratio Reduction of Carrier-Suppressed Optical SSB Modulation: Performance Comparison of Three Methods. Photonics 2021, 8, 67. [Google Scholar] [CrossRef]
- Yaakob, S.; Mahmood, R.M.; Zan, Z.; Rashidi, C.B.M.; Mahmud, A.; Anas, S.B.A. Modulation Index and Phase Imbalance of Dual-Sideband Optical Carrier Suppression (DSB-OCS) in Optical Millimeter-Wave System. Photonics 2021, 8, 153. [Google Scholar] [CrossRef]
- Ganjali, M.; Safavi, N.; Qashqaei, M.; Hosseini, S.E. Optical single-sideband polarization modulator based on Sagnac interferometers and its applications in radio-over-fiber systems. J. Opt. Soc. Am. B 2020, 37, 3268–3276. [Google Scholar] [CrossRef]
- ITU. Frequency Plans for Terrestrial Non-Broadcasting Services Document WRS20/8-E. In Proceedings of the ITU World Radiocommunication Seminar 2020 (WRS-20), Online, 3 November 2020. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR | Emission Classes Used in Distress Communications | Stability to Disturbances | ||
|---|---|---|---|---|
| IFD Conclusions | Simulink Conclusions | Conclusions from the Technical Literature/References [21,22,23,24] | ||
| >10 dB | A3X | Depending on the modulation index m and the normalized modulation signal power . Performances for m < 1 are below F1B, J3E but above G3E. | Very good. Similar performance as J3E and higher than F1B and G3E. | Good. According to [23] the poorest performance. According to [24] poorer performance than J3E. |
| F1B | Depending on the deviation ratio D, and the normalized modulation signal power . For low values of D and performing below J3E. | Very good. | Very good. Acording [21,22,23] the best performance. | |
| J3E | IFD = 1—good | Very good. | Good. | |
| G3E | Depending on the phase modulator slope KMG and the normalized modulation signal power . It has performance over J3E and A3X only for high values of KMG and . | Depends on the phase deviation; very good for phase deviation = π/3. | Very good. According to [21,23,24] better performance than J3E and A3X. | |
| 3–10 dB | A3X | N/A—we considered that the amplitude of the useful signal is higher in relation to the noise for most of the time | Very good | Good only for case of coherent detection, unacceptable for system with envelope detection. |
| F1B | N/A—we considered that the amplitude of the useful signal is higher in relation to the noise for most of the time | Unacceptable | Very low below the SNR threshold of 10 dB [21]. Can be improved with preemphasis/deemphasis systems [22,23,24]. According to [24] better than A3X and J3E. | |
| J3E | IFD = 1—good for case of coherent detection. | Very good. | Good for case of coherent detection. | |
| G3E | N/A—we considered that the amplitude of the useful signal is higher in relation to the noise for most of the time. | Acceptable for phase deviation = π/3 (can be improved using additional processing methods). | Good. According to [24] better than F1B for most practical signals. | |
| 0–3 dB | A3X | Similar to case 3—10 dB. | Good | Unacceptable |
| F1B | Similar to case 3—10 dB. | Unacceptable | Unacceptable [21]. | |
| J3E | Similar to case 3—10 dB. | Good | Good for case of coherent detection. | |
| G3E | Similar to case 3—10 dB. | Bad, can be improved with additional processing | According to [24] better than F1B. | |
| 0–(−3) dB | A3X | Similar to case 3—10 dB. | Good | Unacceptable |
| F1B | Similar to case 3—10 dB. | Unacceptable | Unacceptable | |
| J3E | Similar to case 3—10 dB. | Good | Unacceptable | |
| G3E | Similar to case 3—10 dB. | Unacceptable | Unacceptable | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Solcanu, V.; Gaiceanu, M.; Rosu, G. Study of Resistance to Disturbances of the Main Types of Communication Systems on Board Military Ships Used during Interception or Search and Rescue Missions. Inventions 2021, 6, 72. https://doi.org/10.3390/inventions6040072
Solcanu V, Gaiceanu M, Rosu G. Study of Resistance to Disturbances of the Main Types of Communication Systems on Board Military Ships Used during Interception or Search and Rescue Missions. Inventions. 2021; 6(4):72. https://doi.org/10.3390/inventions6040072
Chicago/Turabian StyleSolcanu, Vasile, Marian Gaiceanu, and Georgiana Rosu. 2021. "Study of Resistance to Disturbances of the Main Types of Communication Systems on Board Military Ships Used during Interception or Search and Rescue Missions" Inventions 6, no. 4: 72. https://doi.org/10.3390/inventions6040072