
Remaining Useful Life Prediction of Lithium-Ion Batteries Based on a Cubic Polynomial Degradation Model and Envelope Extraction

Abstract
:
1. Introduction
2. Capacity Degradation Modeling of Lithium-Ion Batteries
2.1. Modeling of Lithium-Ion Batteries by Nonlinear Wiener Process with ME
2.2. Nonlinear Degradation Model Based on a Cubic Polynomial Function
3. RUL Prediction
3.1. Online Updating of Random Parameters Based on Kalman Filtering
3.2. RUL Prediction
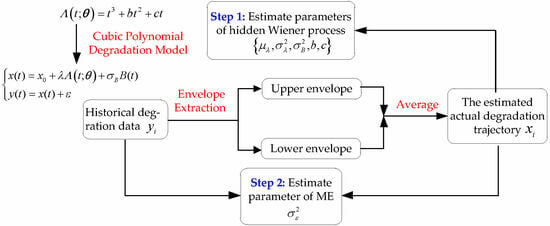
4. Subjective Parameter Estimation Based on Envelope Extraction
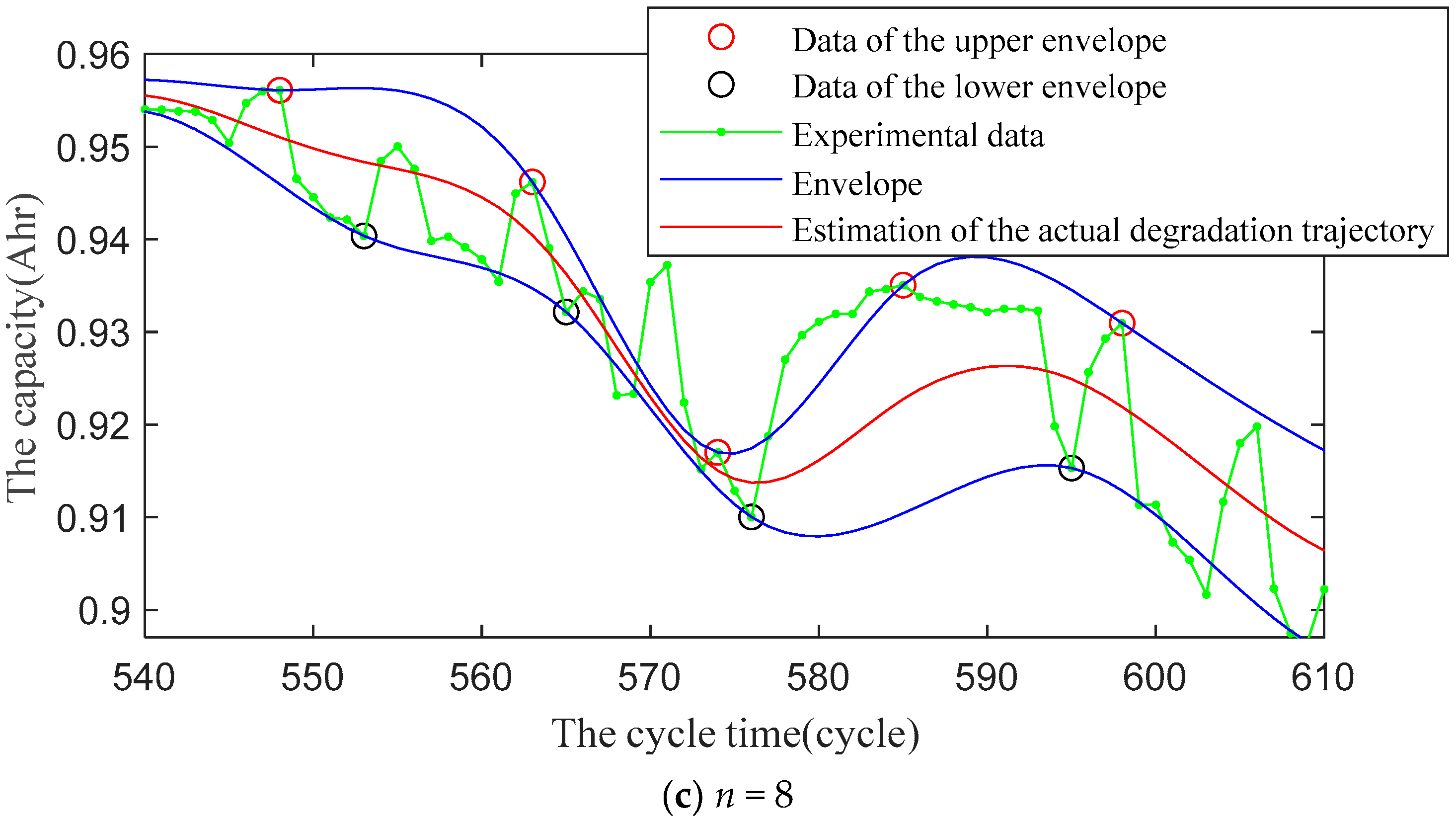
4.1. Estimation of Actual Degradation Trajectory of Lithium-Ion Batteries Based on Envelope Extraction
4.2. Offline Parameters Estimation
5. Experimental Studies
5.1. Offline Parameter Estimation
5.2. RUL Prediction
6. Conclusions
- (1)
- A method based on envelope extraction was proposed to estimate the degradation trajectory, and algorithms for obtaining the upper/lower envelope curves and an expression for the estimation of the ME were proposed. The effectiveness and practicality of this method were validated through comparisons with traditional MLE methods considering the ME in terms of MSEM.
- (2)
- The degradation trajectory was fitted using a cubic polynomial function model based on nonlinear Wiener processes. Through comparison and analysis with several typical nonlinear models, it was demonstrated that the cubic polynomial function model fit the typical degradation characteristics of lithium-ion batteries better and could improve the accuracy of RUL prediction for lithium-ion batteries in terms of MSE of RUL prediction.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tian, H.; Qin, P.; Li, K.; Zhao, Z. A review of the state of health for lithium-ion batteries: Research status and suggestions. J. Clean. Prod. 2020, 261, 120813. [Google Scholar] [CrossRef]
- Wang, S.; Jin, S.; Bai, D.; Fan, Y.; Shi, H.; Fernandez, C. A critical review of improved deep learning methods for the remaining useful life prediction of lithium-ion batteries. Energy Rep. 2021, 7, 5562–5574. [Google Scholar] [CrossRef]
- Dai, Q.; Kelly, J.C.; Gaines, L.; Wang, M. Life cycle analysis of lithium-ion batteries for automotive applications. Batteries 2019, 5, 48. [Google Scholar] [CrossRef]
- Kurzweil, P.; Shamonin, M. State-of-charge monitoring by impedance spectroscopy during long-term self-discharge of supercapacitors and Lithium-Ion batteries. Batteries 2018, 4, 35. [Google Scholar] [CrossRef]
- Liu, K.; Shang, Y.; Ouyang, Q.; Widanage, W.D. A data-driven approach with uncertainty quantification for predicting future capacities and remaining useful life of lithium-ion battery. IEEE Trans. Ind. Electron. 2021, 68, 3170–3180. [Google Scholar] [CrossRef]
- Tomaszewska, A.; Chu, Z.; Feng, X.; O’kane, S.; Liu, X.; Chen, J.; Ji, C.; Endler, E.; Li, R.; Liu, L. Lithium-ion battery fast charging: A review. ETransportation 2019, 1, 100011. [Google Scholar] [CrossRef]
- Pecht, M. Prognostics and health management of electronics. In Encyclopedia of Structural Health Monitoring; Wiley & Sons: New York, NY, USA, 2009. [Google Scholar] [CrossRef]
- Meng, H.; Li, Y.-F. A review on prognostics and health management (PHM) methods of lithium-ion batteries. Renew. Sustain. Energy Rev. 2019, 116, 109405. [Google Scholar] [CrossRef]
- Li, Y.; Liu, K.; Foley, A.M.; Zülke, A.; Berecibar, M.; Nanini-Maury, E.; Van Mierlo, J.; Hoster, H.E. Data-driven health estimation and lifetime prediction of lithium-ion batteries: A review. Renew. Sustain. Energy Rev. 2019, 113, 109254. [Google Scholar] [CrossRef]
- Hu, X.; Xu, L.; Lin, X.; Pecht, M. Battery Lifetime Prognostics. Joule 2020, 4, 310–346. [Google Scholar] [CrossRef]
- Ochella, S.; Shafiee, M.; Dinmohammadi, F. Artificial intelligence in prognostics and health management of engineering systems. Eng. Appl. Artif. Intell. 2022, 108, 104552. [Google Scholar] [CrossRef]
- Xia, Q.; Wang, Z.; Ren, Y.; Tao, L.; Lu, C.; Tian, J.; Hu, D.; Wang, Y.; Su, Y.; Chong, J.; et al. A modified reliability model for lithium-ion battery packs based on the stochastic capacity degradation and dynamic response impedance. J. Power Sources 2019, 423, 40–51. [Google Scholar] [CrossRef]
- Sgroi, M.F. Lithium-ion batteries aging mechanisms. Batteries 2022, 8, 205. [Google Scholar] [CrossRef]
- Tran, M.-K.; DaCosta, A.; Mevawalla, A.; Panchal, S.; Fowler, M. Comparative study of equivalent circuit models performance in four common lithium-ion batteries: LFP, NMC, LMO, NCA. Batteries 2021, 7, 51. [Google Scholar] [CrossRef]
- Yu, W.; Guo, Y.; Shang, Z.; Zhang, Y.; Xu, S. A review on comprehensive recycling of spent power lithium-ion battery in China. Etransportation 2022, 11, 100155. [Google Scholar] [CrossRef]
- Su, L.; Wu, M.; Li, Z.; Zhang, J. Cycle life prediction of lithium-ion batteries based on data-driven methods. ETransportation 2021, 10, 100137. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Guo, L.; Li, N.; Yan, T.; Lin, J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mech. Syst. Signal Process. 2018, 104, 799–834. [Google Scholar] [CrossRef]
- Meng, J.; Azib, T.; Yue, M. Early-Stage end-of-Life prediction of lithium-Ion battery using empirical mode decomposition and particle filter. Proc. Inst. Mech. Eng. Part A J. Power Energy 2023, 237, 1090–1099. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, R.; He, H.; Pecht, M.G. Long Short-Term Memory Recurrent Neural Network for Remaining Useful Life Prediction of Lithium-Ion Batteries. IEEE Trans. Veh. Technol. 2018, 67, 5695–5705. [Google Scholar] [CrossRef]
- Liu, D.; Zhou, J.; Pan, D.; Peng, Y.; Peng, X. Lithium-ion battery remaining useful life estimation with an optimized Relevance Vector Machine algorithm with incremental learning. Measurement 2015, 63, 143–151. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, R.; He, H.; Pecht, M. Validation and verification of a hybrid method for remaining useful life prediction of lithium-ion batteries. J. Clean. Prod. 2019, 212, 240–249. [Google Scholar] [CrossRef]
- Liu, K.; Li, Y.; Hu, X.; Lucu, M.; Widanage, W.D. Gaussian process regression with automatic relevance determination kernel for calendar aging prediction of lithium-ion batteries. IEEE Trans. Ind. Inform. 2020, 16, 3767–3777. [Google Scholar] [CrossRef]
- Li, X.; Zhang, L.; Wang, Z.; Dong, P. Remaining useful life prediction for lithium-ion batteries based on a hybrid model combining the long short-term memory and Elman neural networks. J. Energy Storage 2019, 21, 510–518. [Google Scholar] [CrossRef]
- Lipu, M.S.H.; Hannan, M.A.; Hussain, A.; Hoque, M.M.; Ker, P.J.; Saad, M.H.M.; Ayob, A. A review of state of health and remaining useful life estimation methods for lithium-ion battery in electric vehicles: Challenges and recommendations. J. Clean. Prod. 2018, 205, 115–133. [Google Scholar] [CrossRef]
- Bae, S.J.; Kvam, P.H. A nonlinear random-coefficients model for degradation testing. Technometrics 2004, 46, 460–469. [Google Scholar] [CrossRef]
- Lu, C.J.; Meeker, W.O. Using degradation measures to estimate a time-to-failure distribution. Technometrics 1993, 35, 161–174. [Google Scholar] [CrossRef]
- Gebraeel, N.Z.; Lawley, M.A.; Li, R.; Ryan, J.K. Residual-life distributions from component degradation signals: A Bayesian approach. IiE Trans. 2005, 37, 543–557. [Google Scholar] [CrossRef]
- Su, C.; Lu, J.-C.; Chen, D.; Hughes-Oliver, J.M. A random coefficient degradation model with ramdom sample size. Lifetime Data Anal. 1999, 5, 173–183. [Google Scholar] [CrossRef]
- He, W.; Williard, N.; Osterman, M.; Pecht, M. Prognostics of lithium-ion batteries based on Dempster–Shafer theory and the Bayesian Monte Carlo method. J. Power Sources 2011, 196, 10314–10321. [Google Scholar] [CrossRef]
- Chen, L.; An, J.; Wang, H.; Zhang, M.; Pan, H. Remaining useful life prediction for lithium-ion battery by combining an improved particle filter with sliding-window gray model. Energy Rep. 2020, 6, 2086–2093. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, L.; Li, Y.; Zheng, X.; Chen, J.; Jin, J. A hybrid approach for remaining useful life prediction of lithium-ion battery with Adaptive Levy Flight optimized Particle Filter and Long Short-Term Memory network. J. Energy Storage 2021, 44, 103245. [Google Scholar] [CrossRef]
- Ma, G.; Wang, Z.; Liu, W.; Fang, J.; Zhang, Y.; Ding, H.; Yuan, Y. A two-stage integrated method for early prediction of remaining useful life of lithium-ion batteries. Knowl. Based Syst. 2023, 259, 110012. [Google Scholar] [CrossRef]
- Hu, C.; Ye, H.; Jain, G.; Schmidt, C. Remaining useful life assessment of lithium-ion batteries in implantable medical devices. J. Power Sources 2018, 375, 118–130. [Google Scholar] [CrossRef]
- Su, X.; Wang, S.; Pecht, M.; Zhao, L.; Ye, Z. Interacting multiple model particle filter for prognostics of lithium-ion batteries. Microelectron. Reliab. 2017, 70, 59–69. [Google Scholar] [CrossRef]
- Xing, Y.; Ma, E.W.M.; Tsui, K.-L.; Pecht, M. An ensemble model for predicting the remaining useful performance of lithium-ion batteries. Microelectron. Reliab. 2013, 53, 811–820. [Google Scholar] [CrossRef]
- Wang, R.; Zhu, M.; Zhang, X.; Pham, H. Lithium-ion battery remaining useful life prediction using a two-phase degradation model with a dynamic change point. J. Energy Storage 2023, 59, 106457. [Google Scholar] [CrossRef]
- Micea, M.V.; Ungurean, L.; Cârstoiu, G.N.; Groza, V. Online state-of-health assessment for battery management systems. IEEE Trans. Instrum. Meas. 2011, 60, 1997–2006. [Google Scholar] [CrossRef]
- Zhang, M.; Kang, G.; Wu, L.; Guan, Y. A method for capacity prediction of lithium-ion batteries under small sample conditions. Energy 2022, 238, 122094. [Google Scholar] [CrossRef]
- Sun, Y.; Hao, X.; Pecht, M.; Zhou, Y. Remaining useful life prediction for lithium-ion batteries based on an integrated health indicator. Microelectron. Reliab. 2018, 88–90, 1189–1194. [Google Scholar] [CrossRef]
- Chen, D.; Meng, J.; Huang, H.; Wu, J.; Liu, P.; Lu, J.; Liu, T. An empirical-data hybrid driven approach for remaining Useful Life prediction of lithium-ion batteries considering capacity diving. Energy 2022, 245, 123222. [Google Scholar] [CrossRef]
- Ansari, S.; Ayob, A.; Hossain Lipu, M.S.; Hussain, A.; Saad, M.H.M. Remaining useful life prediction for lithium-ion battery storage system: A comprehensive review of methods, key factors, issues and future outlook. Energy Rep. 2022, 8, 12153–12185. [Google Scholar] [CrossRef]
- Xu, X.; Tang, S.; Yu, C.; Xie, J.; Han, X.; Ouyang, M. Remaining useful life prediction of lithium-ion batteries based on Wiener process under time-varying temperature condition. Reliab. Eng. Syst. Saf. 2021, 214, 107675. [Google Scholar] [CrossRef]
- Feng, L.; Wang, H.; Si, X.; Zou, H. A state-space-based prognostic model for hidden and age-dependent nonlinear degradation process. IEEE Trans. Autom. Sci. Eng. 2013, 10, 1072–1086. [Google Scholar] [CrossRef]
- Han, Y.; Ma, C.; Tang, S.; Wang, F.; Sun, X.; Si, X. Residual life estimation of lithium-ion batteries based on nonlinear Wiener process with measurement error. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2022, 237, 133–151. [Google Scholar] [CrossRef]
- Jin, G.; Matthews, D.E.; Zhou, Z. A Bayesian framework for on-line degradation assessment and residual life prediction of secondary batteries inspacecraft. Reliab. Eng. Syst. Saf. 2013, 113, 7–20. [Google Scholar] [CrossRef]
- Tang, S.; Guo, X.; Zhou, Z. Mis-specification analysis of linear Wiener process–based degradation models for the remaining useful life estimation. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2014, 228, 478–487. [Google Scholar] [CrossRef]
- Tang, S.; Yu, C.; Wang, X.; Guo, X.; Si, X. Remaining useful life prediction of lithium-ion batteries based on the Wiener process with measurement error. Energies 2014, 7, 520–547. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Z. A long short-term memory neural network based Wiener process model for remaining useful life prediction. Reliab. Eng. Syst. Saf. 2022, 226, 108651. [Google Scholar] [CrossRef]
- Battery Research Data. Available online: https://calce.umd.edu/data (accessed on 5 April 2023).
- Zheng, J.F.; Si, X.S.; Hu, C.H.; Zhang, Z.X.; Jiang, W. A nonlinear prognostic model for degrading systems with three-source variability. IEEE Trans. Reliab. 2016, 65, 736–750. [Google Scholar] [CrossRef]
- Yu, W.; Tu, W.; Kim, I.Y.; Mechefske, C. A nonlinear-drift-driven Wiener process model for remaining useful life estimation considering three sources of variability. Reliab. Eng. Syst. Saf. 2021, 212, 107631. [Google Scholar] [CrossRef]
- Tang, S. Research on Availability Assessment and Remaining Useful Life Estimation for Storage Systems. Ph.D. Dissertation, High-Tech Institute, Xi’an, China, 2015. [Google Scholar]
- Borghesani, P.; Ricci, R.; Chatterton, S.; Pennacchi, P. A new procedure for using envelope analysis for rolling element bearing diagnostics in variable operating conditions. Mech. Syst. Signal Process. 2013, 38, 23–35. [Google Scholar] [CrossRef]
- Yang, Y.; Yu, D.; Cheng, J. A fault diagnosis approach for roller bearing based on IMF envelope spectrum and SVM. Measurement 2007, 40, 943–950. [Google Scholar] [CrossRef]
- Nguyen, P.; Kang, M.; Kim, J.-M.; Ahn, B.-H.; Ha, J.-M.; Choi, B.-K. Robust condition monitoring of rolling element bearings using de-noising and envelope analysis with signal decomposition techniques. Expert Syst. Appl. 2015, 42, 9024–9032. [Google Scholar] [CrossRef]
- Tang, S.; Wang, F.; Sun, X.; Xu, X.; Yu, C.; Si, X. Unbiased parameters estimation and mis-specification analysis of Wiener process-based degradation model with random effects. Appl. Math. Model. 2022, 109, 134–160. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | |||||
|---|---|---|---|---|---|
| CS235 | 3.49 × 10−4 | 4.28 × 10−3 | 2.72 × 10−3 | 4.53 × 10−4 | 4.28 × 10−3 |
| CS236 | 5.02 × 10−4 | 2.37 × 10−3 | 1.15 × 10−3 | 5.34 × 10−4 | 2.67 × 10−3 |
| CS237 | 3.18 × 10−4 | 4.34 × 10−3 | 2.42 × 10−3 | 4.31 × 10−4 | 4.56 × 10−3 |
| CS238 | 2.50 × 10−4 | 3.60 × 10−3 | 2.52 × 10−3 | 3.87 × 10−4 | 4.02 × 10−3 |
| Algorithm: Envelope Extraction |
|---|
|
|
|
| Method | M0 | M1 |
|---|---|---|
| 2.42 × 10−9 | 3.21 × 10−9 | |
| 2.96 × 10−19 | 6.07 × 10−19 | |
| 1.95 × 10−6 | 5.14 × 10−5 | |
| 5.02 × 10−5 | −5.16 × 10−6 | |
| b | −9.57 × 102 | −1.01 × 103 |
| c | 3.93 × 105 | 3.91 × 105 |
| LnL | 1.45 × 104 | 6.18e × 103 |
| AIC | −2.90 × 104 | −1.24 × 104 |
| Method | M0 | M2 | M3 | M4 | M5 |
|---|---|---|---|---|---|
| 2.42 × 10−9 | 4.04 × 10−2 | 4.05 × 10−2 | 2.87 × 10−11 | −3.82 × 10−6 | |
| 2.96 × 10−19 | 7.25 × 10−5 | 7.26 × 10−5 | 3.79 × 10−23 | 3.17 × 10−7 | |
| 1.96 × 10−6 | 2.04 × 10−6 | 2.04 × 10−6 | 2.05 × 10−6 | 2.16 × 10−6 | |
| b | −9.87 × 102 | 3.26 × 10−3 | 3.26 × 10−6 | 3.54 × 10−6 | −1.72 × 106 |
| c | 3.93 × 105 | 1.34 × 10−4 | - | - | −2.57 × 10−4 |
| d | - | 1.23 × 10−6 | - | - | - |
| Ln L | 1.45 × 104 | 1.44 × 104 | 1.38 × 104 | 1.44 × 104 | 1.44 × 104 |
| AIC | −2.90 × 104 | −2.89 × 104 | −2.76 × 104 | −2.89 × 104 | −2.87 × 104 |
| Selected Battery | M0 | M1 | M2 | M3 | M4 | M5 |
|---|---|---|---|---|---|---|
| CS 235 | 1.62 × 106 | 9.82 × 106 | 3.07 × 106 | 8.12 × 106 | 3.43 × 107 | 4.92 × 107 |
| CS 236 | 6.32 × 106 | 9.94 × 107 | 2.08 × 107 | 2.06 × 107 | 5.82 × 107 | 3.24 × 107 |
| CS 237 | 2.18 × 106 | 1.19 × 107 | 4.43 × 106 | 7.16 × 106 | 2.22 × 107 | 4.24 × 107 |
| CS 238 | 6.51 × 106 | 1.98 × 107 | 6.70 × 106 | 1.21 × 107 | 2.46 × 107 | 4.14 × 107 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, K.; Deng, B.; Tang, S.; Sun, X.; Fang, P.; Si, X.; Han, X. Remaining Useful Life Prediction of Lithium-Ion Batteries Based on a Cubic Polynomial Degradation Model and Envelope Extraction. Batteries 2023, 9, 441. https://doi.org/10.3390/batteries9090441
Su K, Deng B, Tang S, Sun X, Fang P, Si X, Han X. Remaining Useful Life Prediction of Lithium-Ion Batteries Based on a Cubic Polynomial Degradation Model and Envelope Extraction. Batteries. 2023; 9(9):441. https://doi.org/10.3390/batteries9090441
Chicago/Turabian StyleSu, Kangze, Biao Deng, Shengjin Tang, Xiaoyan Sun, Pengya Fang, Xiaosheng Si, and Xuebing Han. 2023. "Remaining Useful Life Prediction of Lithium-Ion Batteries Based on a Cubic Polynomial Degradation Model and Envelope Extraction" Batteries 9, no. 9: 441. https://doi.org/10.3390/batteries9090441