
Enabling Online Search and Fault Inference for Batteries Based on Knowledge Graph

Abstract
:1. Introduction
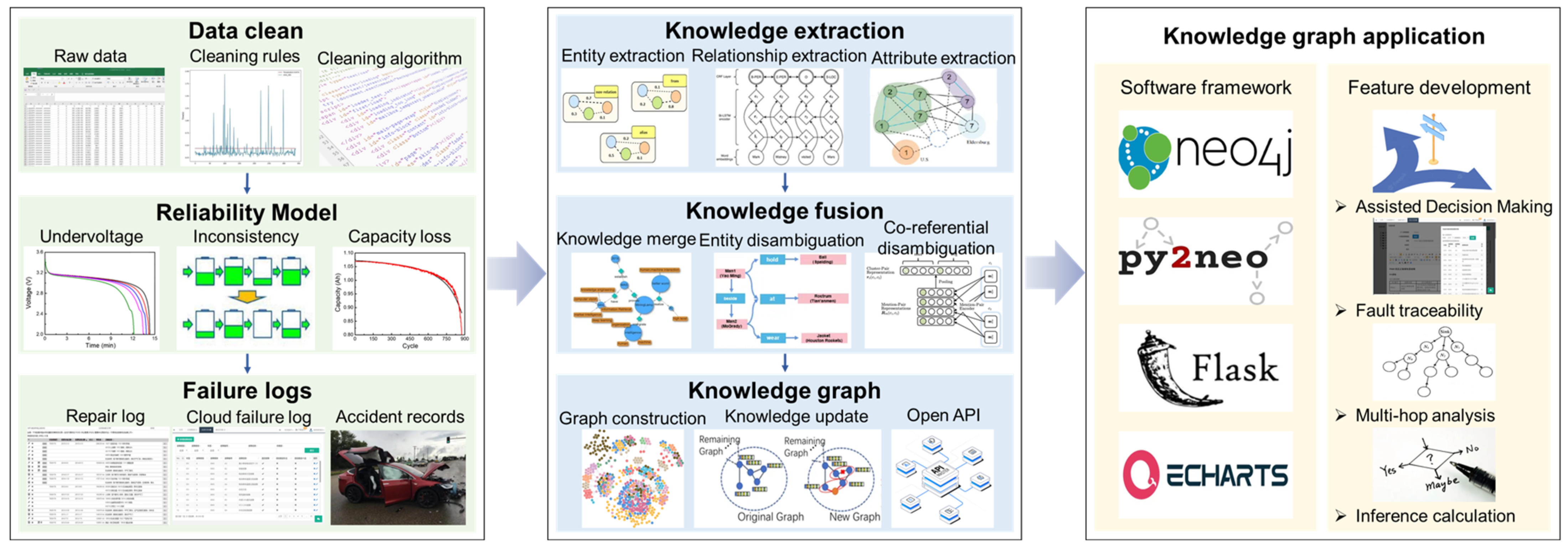
2. Battery Big Data Fault Diagnosis
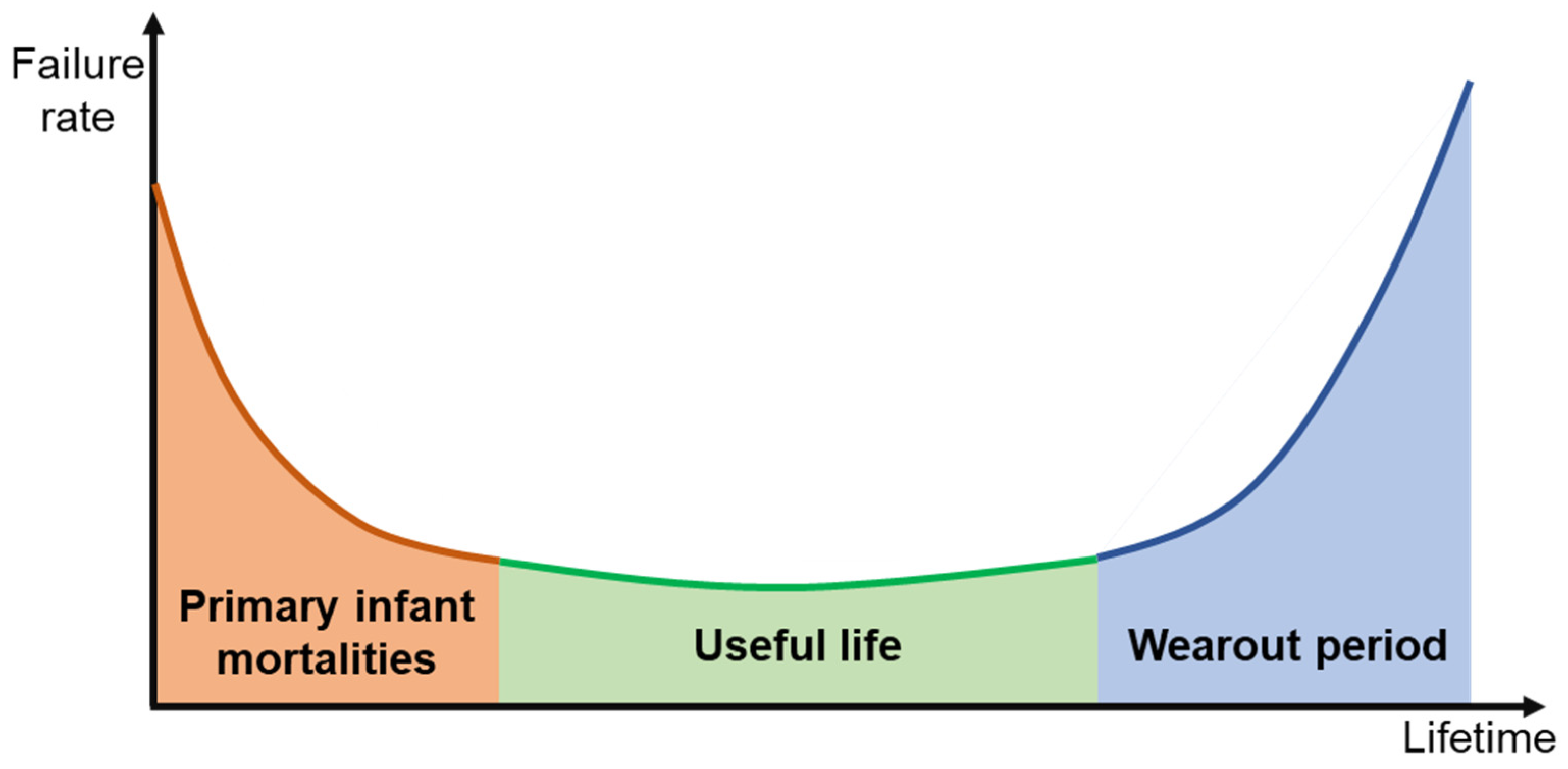
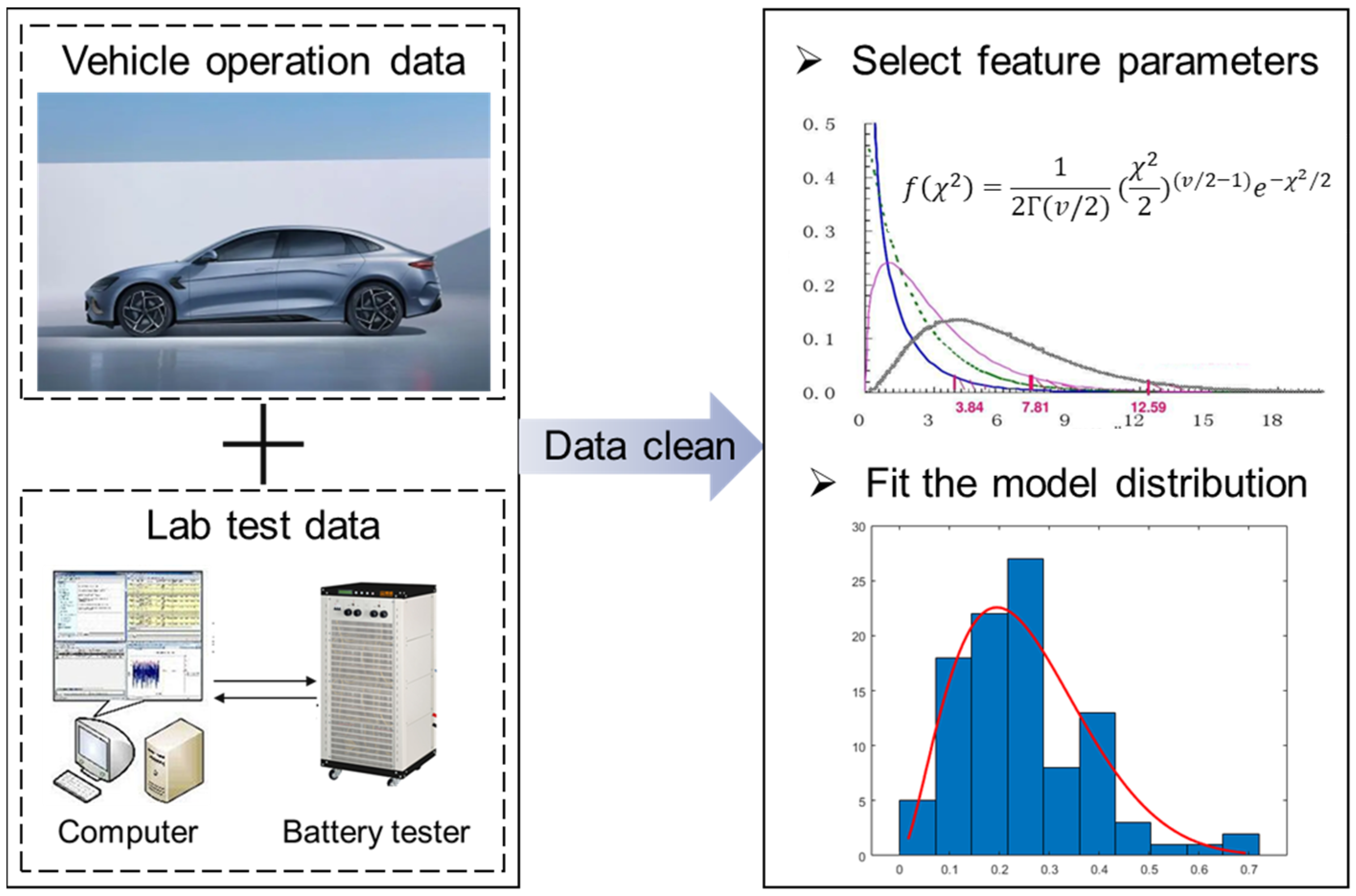
2.1. Battery Big Data Reliability Model
2.2. Reliability Model-Based Fault Diagnosis
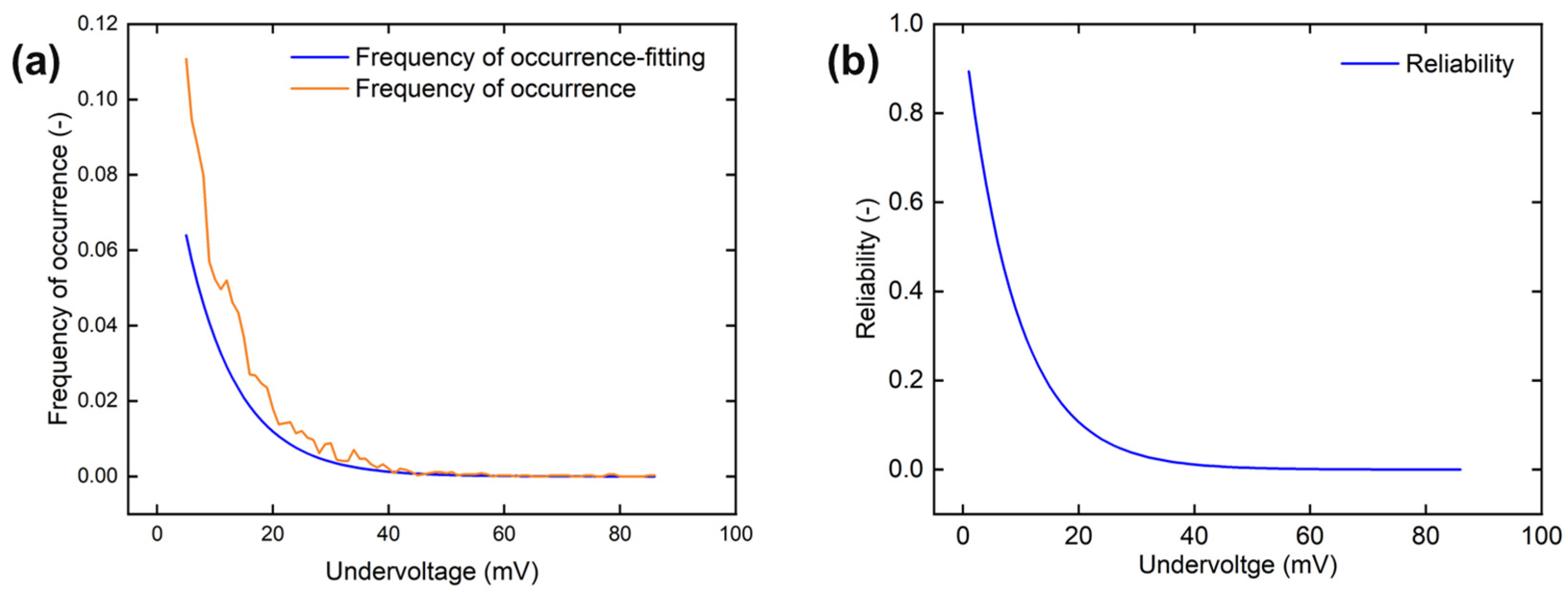
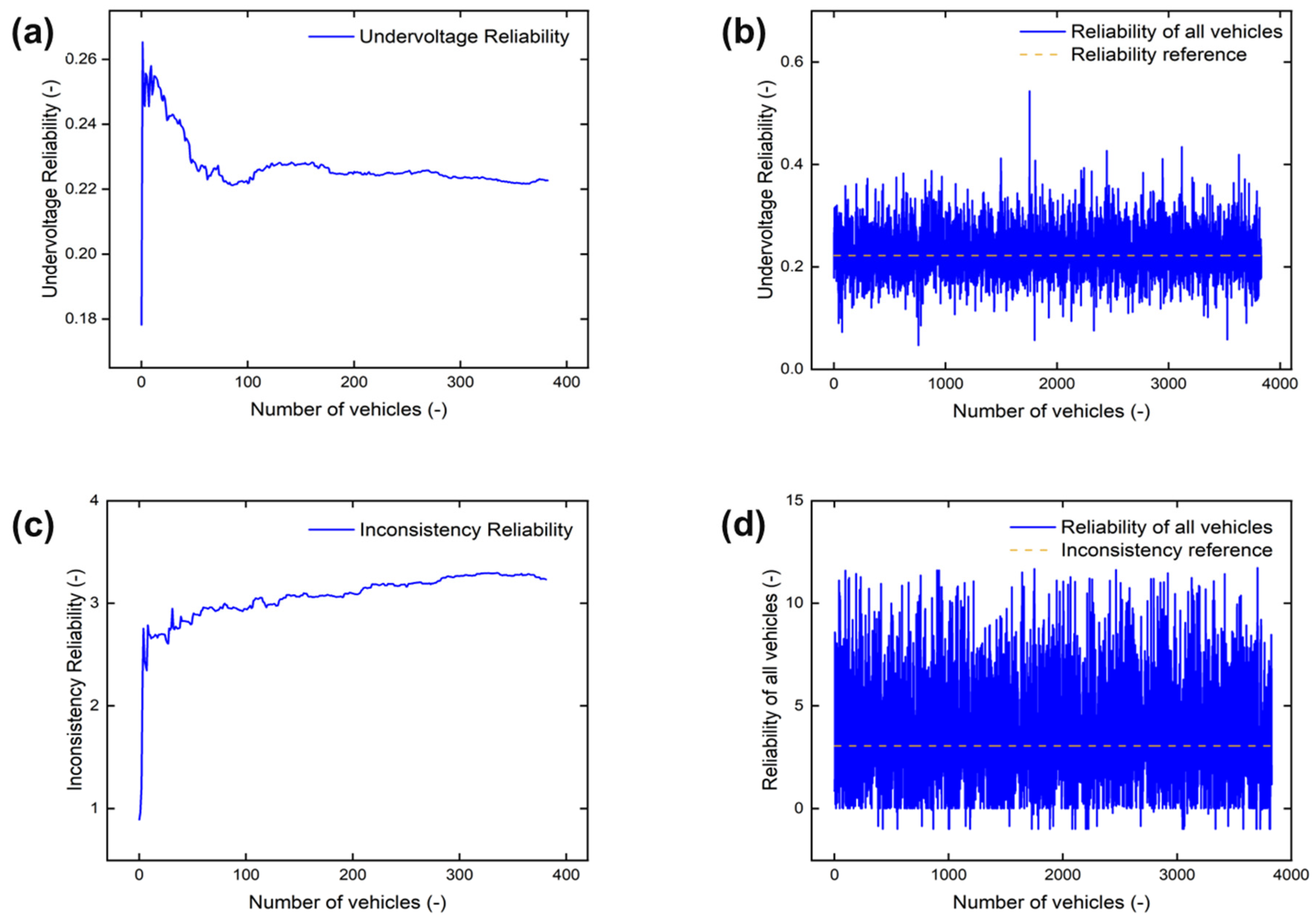
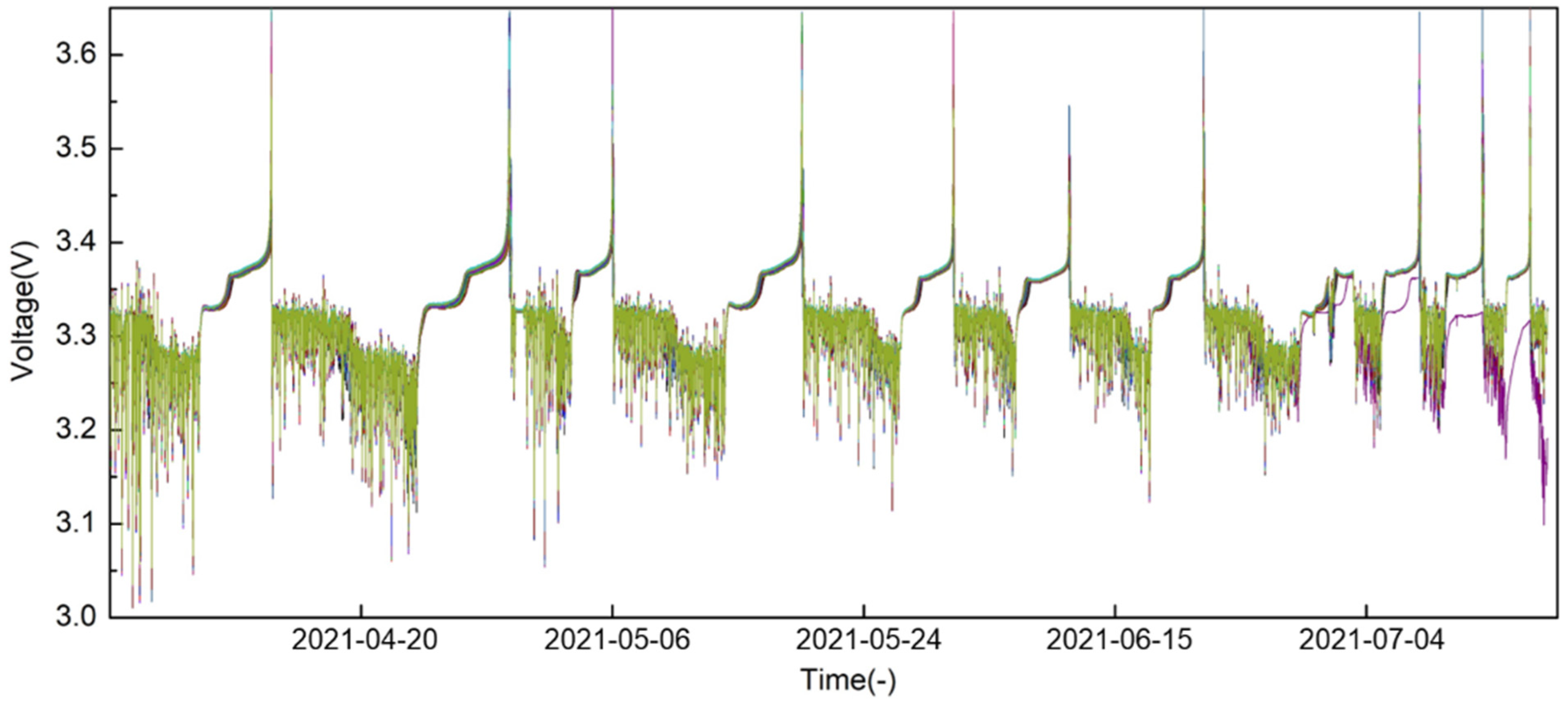
2.2.1. Undervoltage Reliability Model
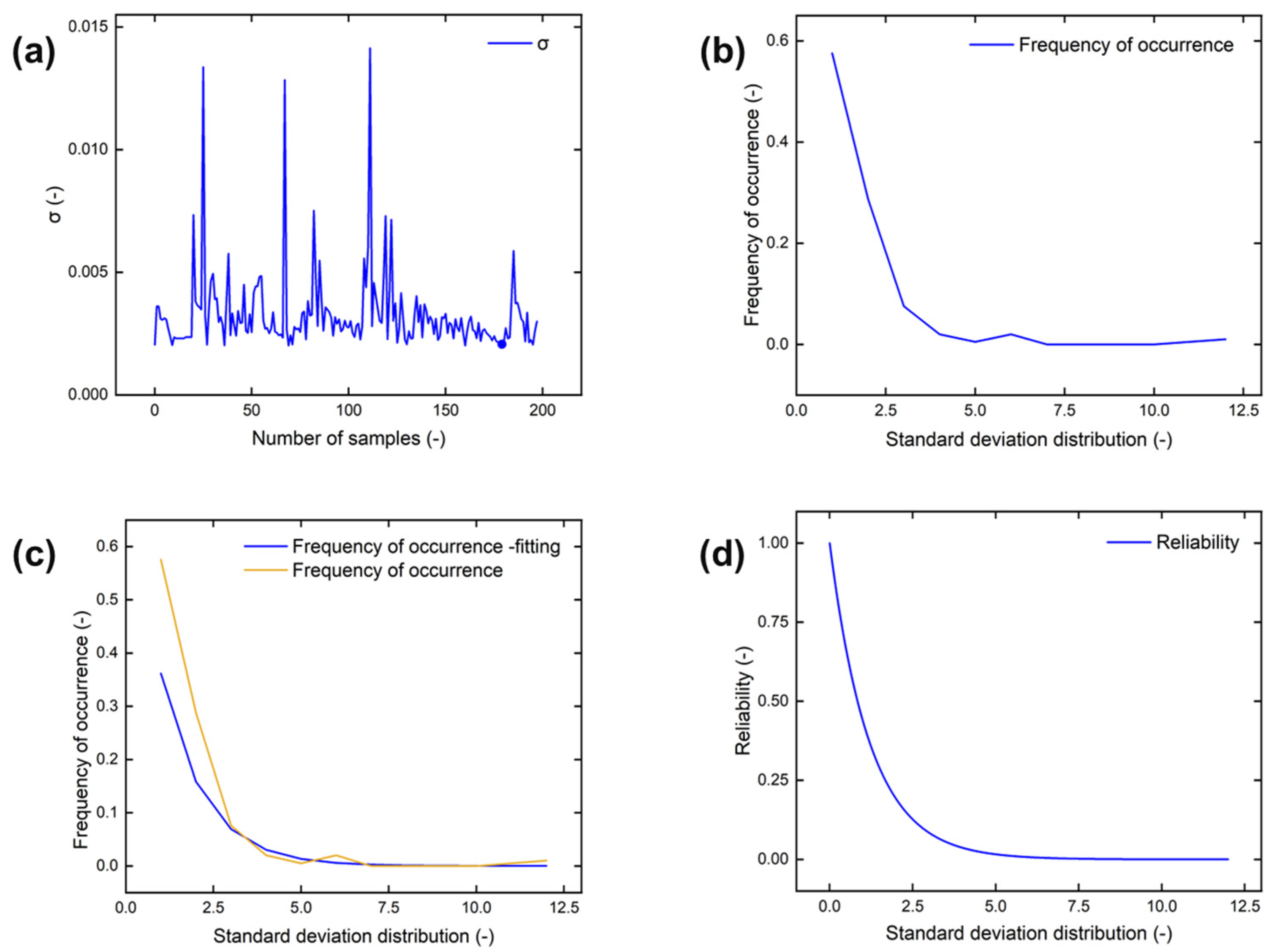
2.2.2. Inconsistency Reliability Model
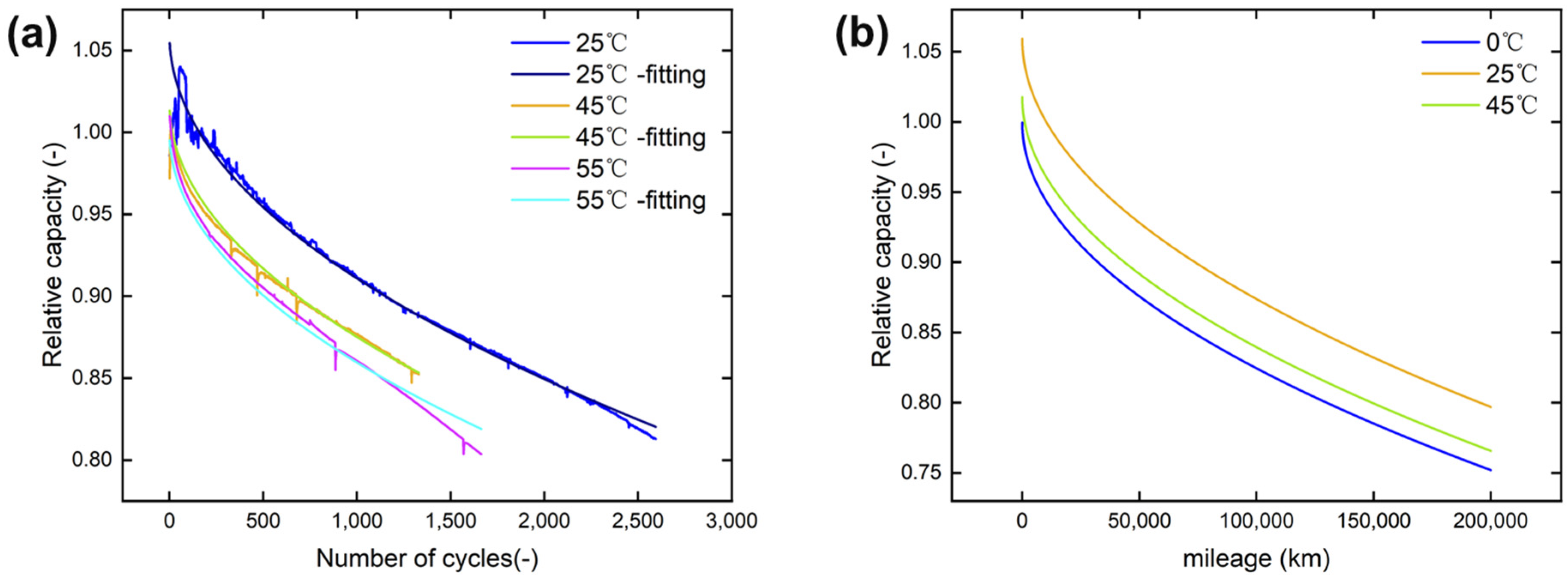
2.2.3. Capacity Loss Reliability Model
2.2.4. Cloud Platform Application
3. Battery Failure Knowledge Graph
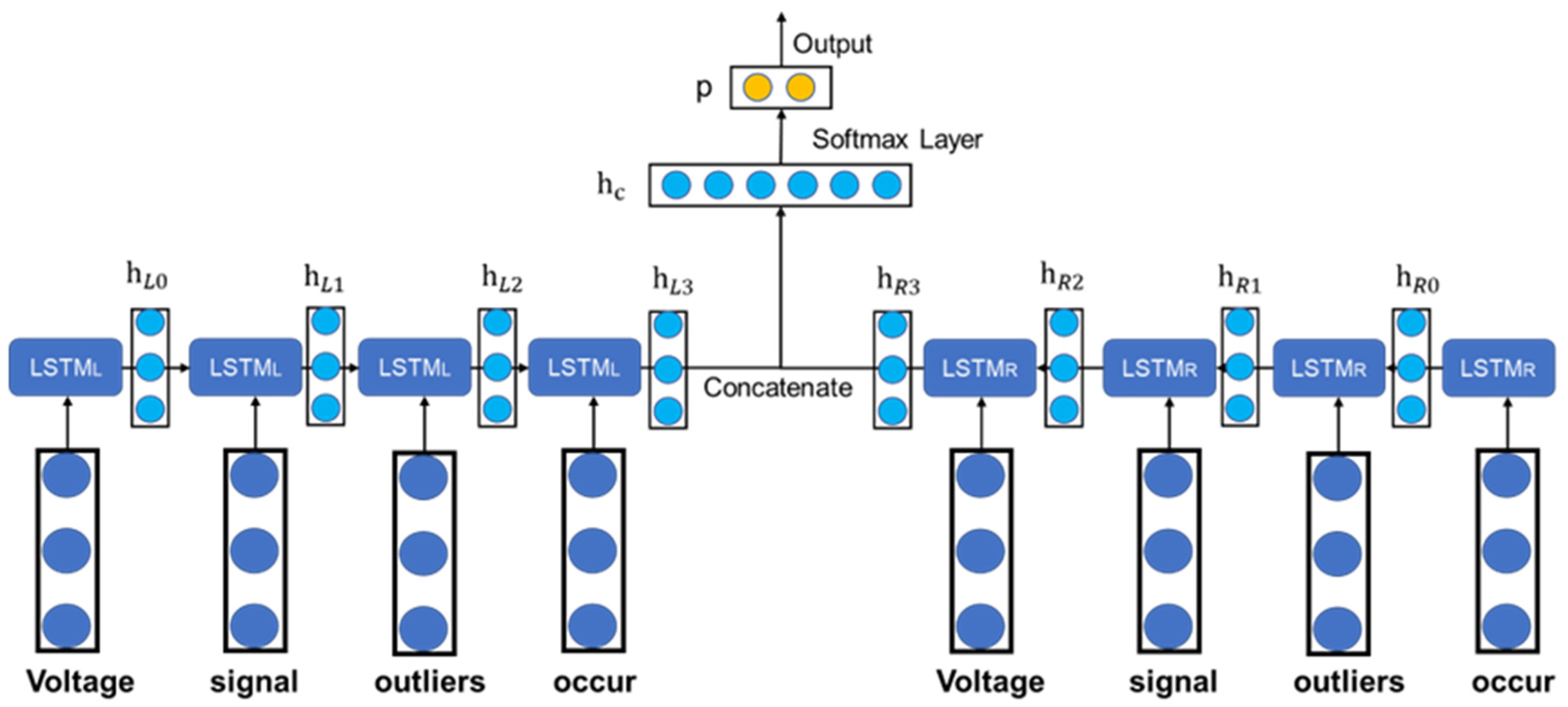
3.1. Knowledge Extraction Based on Bi-LSTM Neural Network
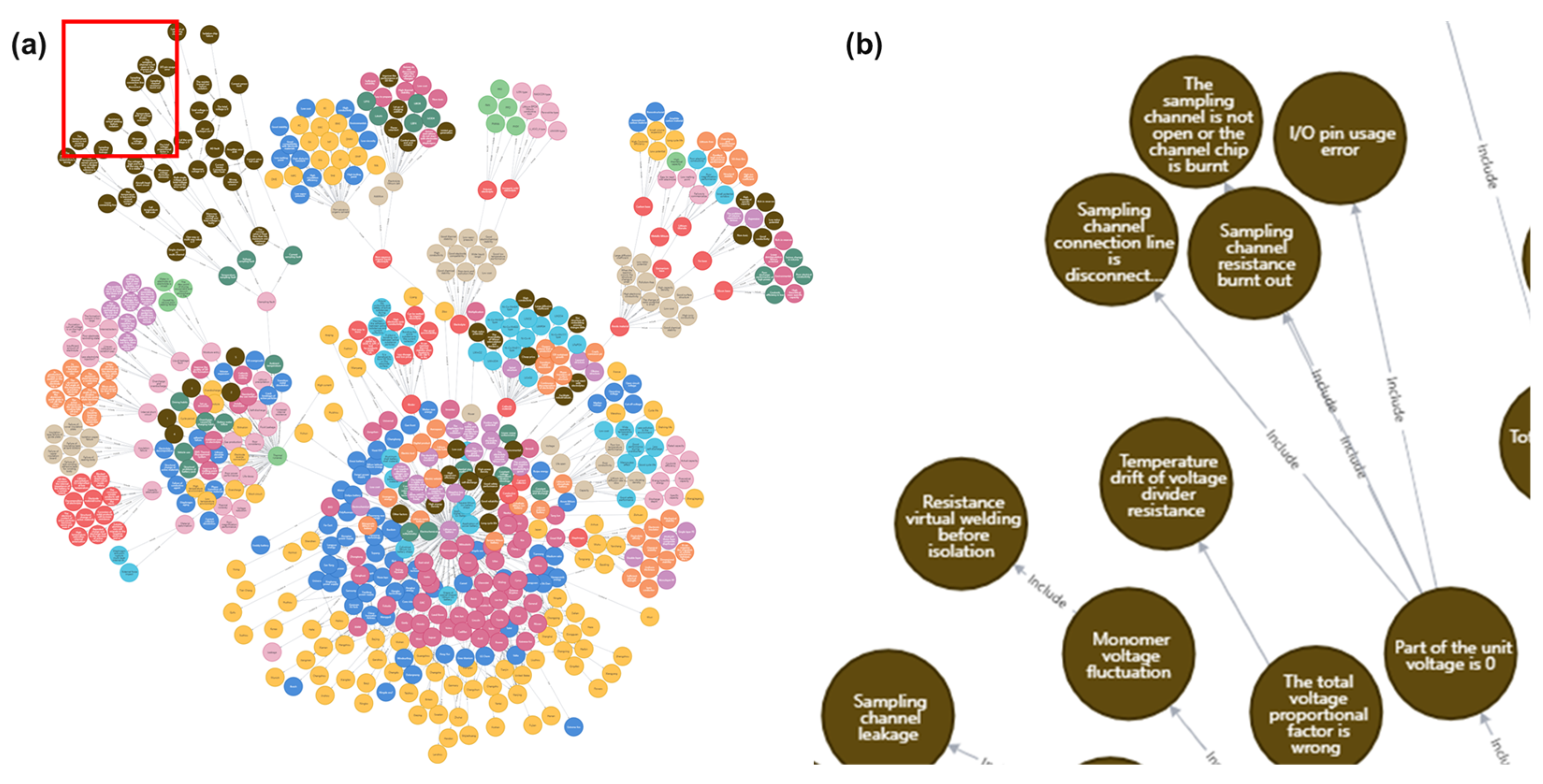
3.2. Battery Fault Knowledge Graph Construction
- Nodes are fundamental elements in a graph database, usually representing entities, similar to records in a relational database.
- Nodes are connected by relationships, and multiple labels can exist for each node to describe the node’s role within it, as well as various attributes to represent the node’s fundamental values.
- Attributes are used to express further the critical content of a node, expressed as a string, and can also be indexed.
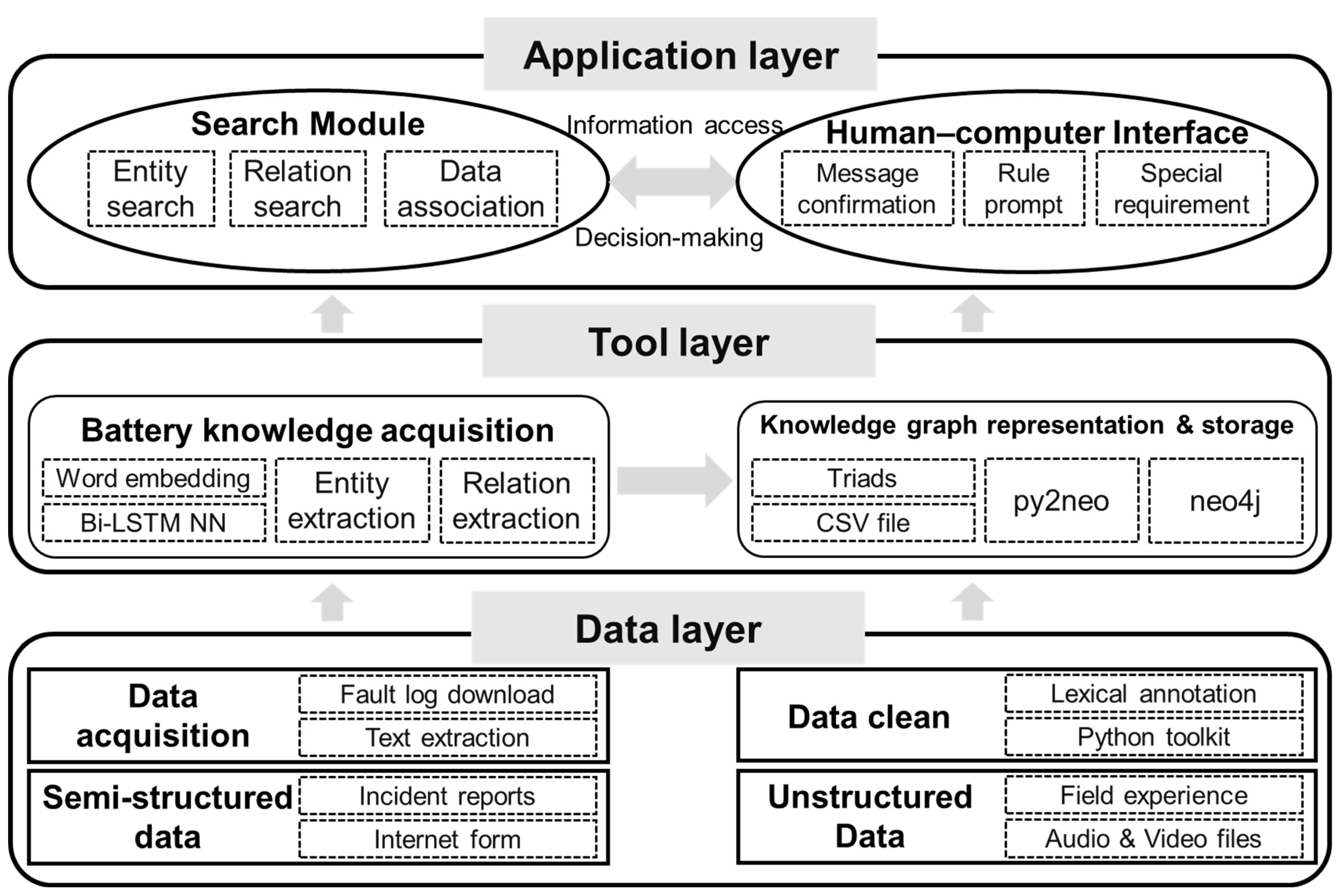
4. Applications and Analysis
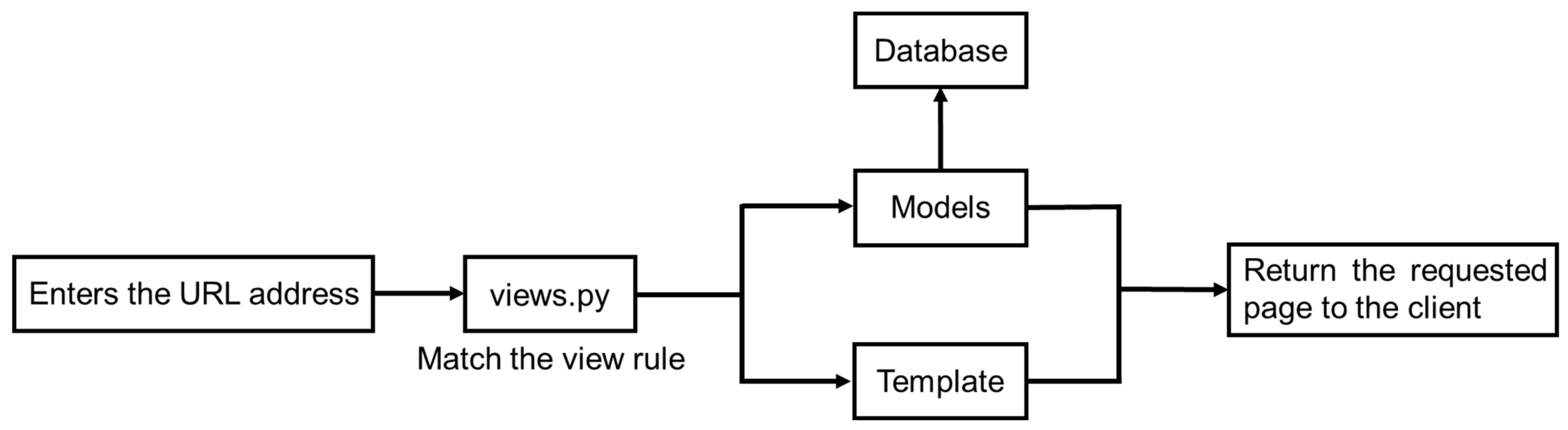
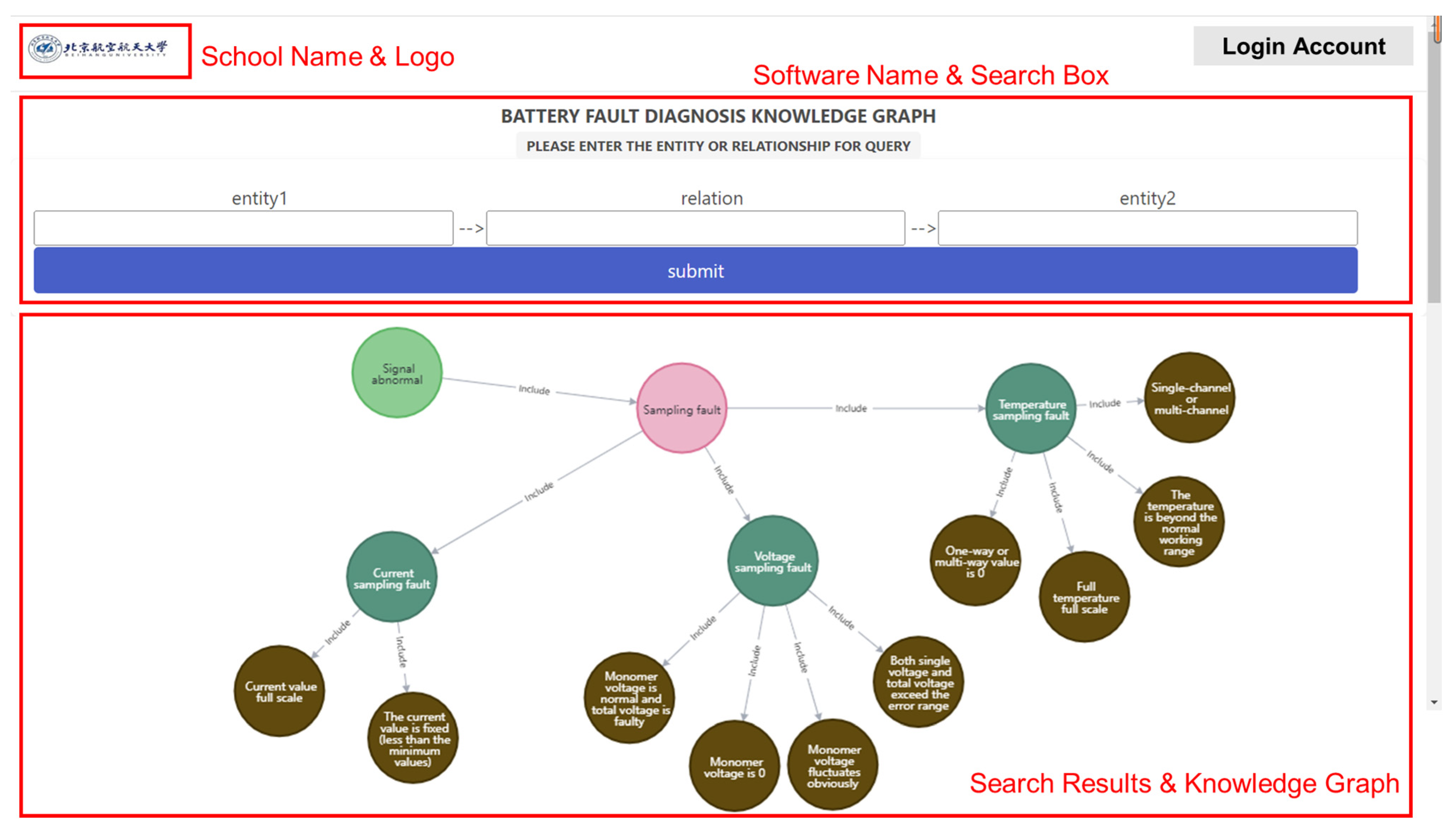
4.1. Battery Fault Knowledge Search Online
- Submit the query via a form on the front-end page;
- The back office receives the request message, disassembles it, and assembles the Cypher statement;
- Query node and relationship information in the Neo4j graphical database by executing cypher statements;
- Processing and filtering of the query results by the back end once the results have been obtained;
- Finally, the processed information is used to render the front-end interface, together with the Echarts chart library, to visualize the knowledge graph.
4.2. Battery Fault Reasoning and Decision Making
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lin, T.; Chen, Z.; Zheng, C.; Huang, D.; Zhou, S. Fault Diagnosis of Lithium-Ion Battery Pack Based on Hybrid System and Dual Extended Kalman Filter Algorithm. IEEE Trans. Transp. Electrif. 2021, 7, 26–36. [Google Scholar] [CrossRef]
- Zhang, K.; Hu, X.; Liu, Y.; Lin, X.; Liu, W. Multi-Fault Detection and Isolation for Lithium-Ion Battery Systems. IEEE Trans. Power Electron. 2022, 37, 971–989. [Google Scholar] [CrossRef]
- Li, D.; Zhang, Z.; Liu, P.; Wang, Z.; Zhang, L. Battery Fault Diagnosis for Electric Vehicles Based on Voltage Abnormality by Combining the Long Short-Term Memory Neural Network and the Equivalent Circuit Model. IEEE Trans. Power Electron. 2021, 36, 1303–1315. [Google Scholar] [CrossRef]
- Qiu, Y.; Dong, T.; Lin, D.; Zhao, B.; Cao, W.; Jiang, F. Fault Diagnosis for Lithium-Ion Battery Energy Storage Systems Based on Local Outlier Factor. J. Energy Storage 2022, 55, 105470. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, P.; Wang, Z.; Zhang, L.; Hong, J. Fault and Defect Diagnosis of Battery for Electric Vehicles Based on Big Data Analysis Methods. Appl. Energy 2017, 207, 354–362. [Google Scholar] [CrossRef]
- Ojo, O.; Lang, H.; Kim, Y.; Hu, X.; Mu, B.; Lin, X. A Neural Network Based Method for Thermal Fault Detection in Lithium-Ion Batteries. IEEE Trans. Ind. Electron. 2021, 68, 4068–4078. [Google Scholar] [CrossRef]
- Ojo, O.J.; Lin, X.; Lang, H.; Hu, X. A Voltage Fault Detection Method Enabled by a Recurrent Neural Network and Residual Threshold Monitor for Lithium-Ion Batteries. In Proceedings of the 2021 IEEE Transportation Electrification Conference and Expo, ITEC 2021, Chicago, IL, USA, 21–25 June 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021; pp. 813–820. [Google Scholar]
- Xu, C.; Li, L.; Xu, Y.; Han, X.; Zheng, Y. A Vehicle-Cloud Collaborative Method for Multi-Type Fault Diagnosis of Lithium-Ion Batteries. eTransportation 2022, 12, 100172. [Google Scholar] [CrossRef]
- Auer, S.; Kasprzik, A.; Kovtun, V.; Stocker, M.; Prinz, M.; Vidal, M.E. Towards a Knowledge Graph for Science. In Proceedings of the ACM International Conference Proceeding Series, Taipei, China, 13–15 August 2018; Association for Computing Machinery: New York, NY, USA, 2018. [Google Scholar]
- Zhuo, J.; Zhu, Q.; Yue, Y.; Zhao, Y.; Han, W. A Neighborhood-Attention Fine-Grained Entity Typing for Knowledge Graph Completion. In Proceedings of the WSDM 2022—Proceedings of the 15th ACM International Conference on Web Search and Data Mining, Tempe, AZ, USA, 21–25 February 2022; Association for Computing Machinery, Inc.: New York, NY, USA, 2022; pp. 1525–1533. [Google Scholar]
- Groth, P.; Rula, A.; Schneider, J.; Tiddi, I.; Simperl, E.; Alexopoulos, P.; Hoekstra, R.; Alam, M.; Dimou, A.; Tamper, M. (Eds.) The Semantic Web: ESWC 2022 Satellite Events; Lecture Notes in Computer Science; Springer International Publishing: Cham, Germany, 2022; Volume 13384, ISBN 978-3-031-11608-7. [Google Scholar]
- Yang, Y.; Zhu, Y.; Li, Y. Personalized Recommendation with Knowledge Graph via Dual-Autoencoder. Appl. Intell. 2022, 52, 6196–6207. [Google Scholar] [CrossRef]
- Groth, P.; Simperl, E.; Gray, A.; Sabou, M.; Krötzsch, M.; Lecue, F.; Flöck, F.; Gil, Y. The Semantic Web-ISWC 2016, Kobe, Japan, 17–21 October 2016; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Memmi, G.; Yang, B.; Kong, L.; Zhang, T.; Qiu, M. (Eds.) Knowledge Science, Engineering and Management; Lecture Notes in Computer Science; Springer International Publishing: Cham, Germany, 2022; Volume 13368, ISBN 978-3-031-10982-9. [Google Scholar]
- Corcho, O.; Hollink, L.; Kutz, O.; Troquard, N.; Ekaputra, F.J. (Eds.) Knowledge Engineering and Knowledge Management; Lecture Notes in Computer Science; Springer International Publishing: Cham, Germany, 2022; Volume 13514, ISBN 978-3-031-17104-8. [Google Scholar]
- Hou, X.; Zhu, C.; Li, Y.; Wang, P.; Peng, X. Question Answering System Based on Military Knowledge Graph. In Proceedings of the 2020 IEEE 19th International Conference on Cognitive Informatics & Cognitive Computing (ICCI*CC), Beijing, China, 4 May 2022; p. 44. [Google Scholar]
- Guan, N.; Song, D.; Liao, L. Knowledge Graph Embedding with Concepts. Knowl.-Based Syst. 2019, 164, 38–44. [Google Scholar] [CrossRef]
- Gogleva, A.; Polychronopoulos, D.; Pfeifer, M.; Poroshin, V.; Ughetto, M.; Martin, M.J.; Thorpe, H.; Bornot, A.; Smith, P.D.; Sidders, B.; et al. Knowledge Graph-Based Recommendation Framework Identifies Drivers of Resistance in EGFR Mutant Non-Small Cell Lung Cancer. Nat. Commun. 2022, 13, 1667. [Google Scholar] [CrossRef]
- Zeng, X.; Tu, X.; Liu, Y.; Fu, X.; Su, Y. Toward Better Drug Discovery with Knowledge Graph. Curr. Opin. Struct. Biol. 2022, 72, 114–126. [Google Scholar]
- Liu, H.; Ma, R.; Li, D.; Yan, L.; Ma, Z. Machinery Fault Diagnosis Based on Deep Learning for Time Series Analysis and Knowledge Graphs. J. Signal Process. Syst. 2021, 93, 1433–1455. [Google Scholar] [CrossRef]
- Han, H.; Wang, J.; Wang, X.; Chen, S. Construction and Evolution of Fault Diagnosis Knowledge Graph in Industrial Process. IEEE Trans. Instrum. Meas. 2022, 71, 3522212. [Google Scholar] [CrossRef]
- Deng, J.; Wang, T.; Wang, Z.; Zhou, J.; Cheng, L. Research on Event Logic Knowledge Graph Construction Method of Robot Transmission System Fault Diagnosis. IEEE Access 2022, 10, 17656–17673. [Google Scholar] [CrossRef]
- Alvarez-Alvarado, M.S.; Jayaweera, D. Bathtub Curve as a Markovian Process to Describe the Reliability of Repairable Components. IET Gener. Transm. Distrib. 2018, 12, 5683–5689. [Google Scholar] [CrossRef]
- Smith, K.; Wood, E.; Santhanagopalan, S.; Kim, G.-H.; Neubauer, J.; Pesaran, A. Models for Battery Reliability and Lifetime; NREL: Golden, CO, USA, 2013. [Google Scholar]
- Dai, S.; Ding, Y.; Zhang, Z.; Zuo, W.; Huang, X.; Zhu, S. GrantExtractor: Accurate Grant Support Information Extraction from Biomedical Fulltext Based on Bi-LSTM-CRF. IEEE/ACM Trans. Comput. Biol. Bioinform. 2021, 18, 205–215. [Google Scholar] [CrossRef]
- Lample, G.; Ballesteros, M.; Subramanian, S.; Kawakami, K.; Dyer, C. Neural Architectures for Named Entity Recognition. In Proceedings of the 2016 Conference of the North American Chapter of the Association for Computational Linguistics: Human Language Technologies, San Diego, CA, USA, 12–17 June 2016; Association for Computational Linguistics: Toronto, ON, Canada, 2016. [Google Scholar]
- Miller, J.J. Graph Database Applications and Concepts with Neo4j; AIS: Atlanta, Georgia, 2013. [Google Scholar]
- Francis, N.; Green, A.; Guagliardo, P.; Libkin, L.; Lindaaker, T.; Marsault, V.; Plantikow, S.; Rydberg, M.; Selmer, P.; Taylor, A. Cypher: An Evolving Query Language for Property Graphs. In Proceedings of the ACM SIGMOD International Conference on Management of Data, Houston, TX, USA, 10–15 June 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 1433–1445. [Google Scholar]
- Thoutam, V. A Study On Python Web Application Framework. Electron. Netw. Appl. Math. 2021, 1, 48–55. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, Z.; Cao, R.; Wang, M.; Cheng, H.; Zhang, L.; Jiang, Y.; Li, Y.; Chen, B.; Ling, H.; et al. Implementation for a Cloud Battery Management System Based on the CHAIN Framework. Energy AI 2021, 5, 100088. [Google Scholar] [CrossRef]
- Zheng, P.; Xia, L.; Li, C.; Li, X.; Liu, B. Towards Self-X Cognitive Manufacturing Network: An Industrial Knowledge Graph-Based Multi-Agent Reinforcement Learning Approach. J. Manuf. Syst. 2021, 61, 16–26. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noise Type | Example |
|---|---|
| connection noise words | ‘and’, ‘or’, ‘not’, etc. |
| name noise words | ‘soc’, ‘voltage’, ‘temperature’, etc. |
| orientation noise words | ‘over’, ‘under’, etc. |
| confusing noise words | ‘dfa’, ‘gfaer’, etc. |
| A | B | C | D | E | Example of Input | |
|---|---|---|---|---|---|---|
| 1 | Yes | Yes | Yes | Yes | Yes | “Signal abnormal. Sampling fault”, “Include”, “Sampling fault. Current sampling fault” |
| 2 | Yes | Yes | No | Yes | Yes | “Signal abnormal. Sampling fault”, “”, “Sampling fault. Current sampling fault” |
| 3 | Yes | Yes | Yes | Yes | No | “Signal abnormal. Sampling fault”, “Include”, “Sampling fault” |
| 4 | Yes | Yes | No | Yes | No | “Signal abnormal. Sampling fault”, “”, “Sampling fault” |
| 5 | Yes | No | Yes | Yes | Yes | “Signal abnormal”, “Include”, “Sampling fault. Current sampling fault” |
| 6 | Yes | No | No | Yes | Yes | “Signal abnormal”, “”, “Sampling fault. Current sampling fault” |
| 7 | Yes | No | Yes | Yes | No | “Signal abnormal”, “Include”, “Sampling fault” |
| 8 | Yes | No | Yes | No | No | “Signal abnormal”, “Include”, “” |
| 9 | Yes | No | No | Yes | No | “Signal abnormal”, “”, “Sampling fault” |
| 10 | No | No | Yes | Yes | No | “”, “Include”, “Sampling fault” |
| 11 | Yes | No | No | No | No | “Signal abnormal”, “”, “” |
| 12 | No | No | Yes | No | No | “”, “Include”, “” |
| 13 | No | No | No | Yes | No | “”, “”, “Sampling fault” |
| 14 | No | No | No | No | No | “”, “”, “” |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Sun, Y.; Zhang, L.; Cheng, H.; Cao, R.; Liu, X.; Yang, S. Enabling Online Search and Fault Inference for Batteries Based on Knowledge Graph. Batteries 2023, 9, 124. https://doi.org/10.3390/batteries9020124
Zhang Z, Sun Y, Zhang L, Cheng H, Cao R, Liu X, Yang S. Enabling Online Search and Fault Inference for Batteries Based on Knowledge Graph. Batteries. 2023; 9(2):124. https://doi.org/10.3390/batteries9020124
Chicago/Turabian StyleZhang, Zhengjie, Yefan Sun, Lisheng Zhang, Hanchao Cheng, Rui Cao, Xinhua Liu, and Shichun Yang. 2023. "Enabling Online Search and Fault Inference for Batteries Based on Knowledge Graph" Batteries 9, no. 2: 124. https://doi.org/10.3390/batteries9020124