1. Introduction
As the climate changes caused by traditional fossil fuels become increasingly severe, increasingly more countries are making the transformation of traditional resources into new energy sources as an important goal. Lithium-ion batteries (LIBs) are a highly promising energy storage technology due to their high energy density, low self-discharge property, nearly zero-memory effect, high open-circuit voltage, and long lifespan [
1]. For better management of the battery system, establishing the battery model and studying the battery algorithm is of vital importance [
2].
However, an LIB is a highly complex and nonlinear electrochemical system [
3], so there is scarcely an LIB model that can simultaneously achieve high computational efficiency and high accuracy. For example, in the battery management system (BMS), equivalent circuit models (ECMs) are commonly used as LIB models for algorithm design [
4,
5,
6]. ECMs have a simple structure and calculate extremely fast, but their accuracy needs to be improved to meet the requirements for complex battery algorithms under certain operating conditions [
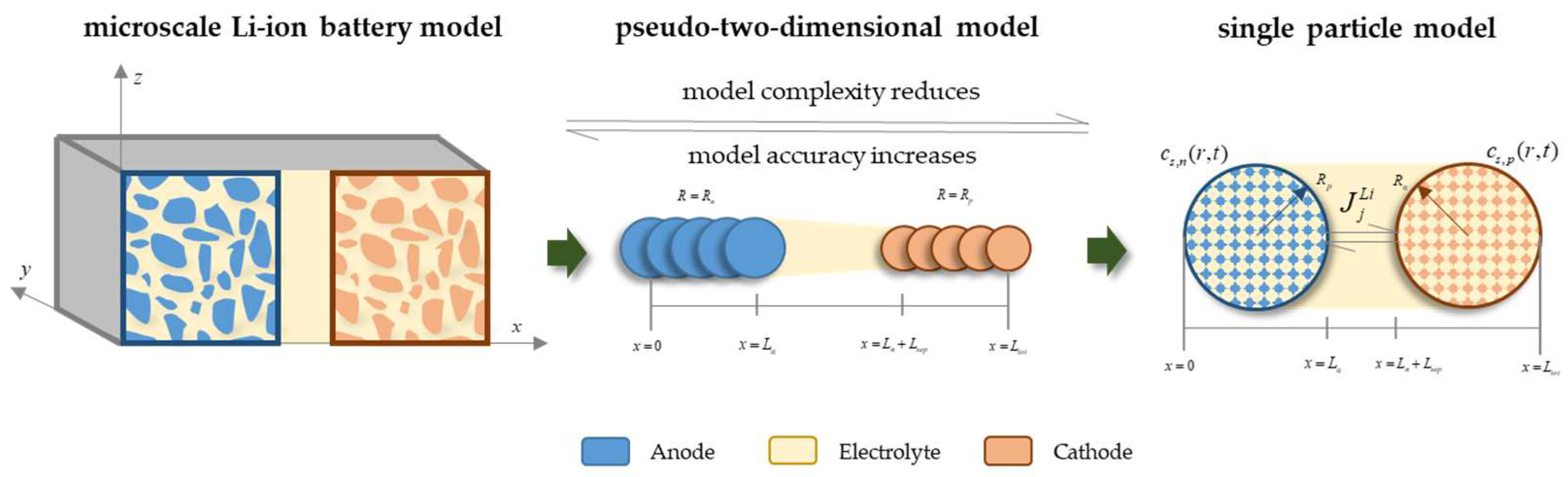
7]. On the contrary, the LIB mechanism model represented by the pseudo-two-dimensional (P2D) model [
8] is very detailed in describing the dynamic of lithium-ion intercalation and deintercalation in microscale. In terms of mechanism, it explains the occurrences of concentration polarization and ohmic polarization within the LIB. However, the mechanism model of LIBs often require dozens of electrochemical parameters to be described and are composed of nonlinear partial differential equations (PDEs), which hinder its application in the on-board BMS [
9]. Currently, the P2D model is mainly solved using numerical methods, such as the finite volume method (FVM) [
10] or finite element method (FEM). There are also more complex but computationally efficient methods, like the explicit–implicit Runge–Kutta–Chebyshev method [
11], as well as a numerical method that iteratively solves each subequation in a specific order [
12]. These studies have used many techniques to improve the computational efficiency of the P2D model. However, due to the limitations of numerical methods, these approaches still demand a considerable amount of computing resources and time. Consequently, these approaches can only be considered in situations where computational resources are relatively sufficient and time requirements are not strict [
13].
The single-particle model (SPM) [
14], as a reduced-order version of the P2D model, simplifies the PDEs in the P2D model into a single PDE by assuming uniform current density in the electrolyte. This assumption dramatically improves the calculation speed of the model, making it applicable to on-board BMS. However, precisely because of the uniform current density assumption, the SPM ignores the concentration polarization of lithium ions in the direction between the positive and negative collector under the condition of a high C-rate. Due to the limited diffusion coefficient of the electrolyte, lithium ions cannot move smoothly, resulting in a significant deviation from the P2D model. To address this issue, many scholars have used methods to approximate the electrolyte lithium-ion concentration and potential inside the battery to eliminate the error of the SPM under high C-rate conditions [
15,
16,
17]. Metha et al. [
17] constructed a model with the parabolic equation and time-varying parameters, subject to boundary conditions and continuity conditions at interfaces of the P2D model. It approximates the lithium-ion concentration distribution in the cathode, anode, and separator. By solving a total of nine differential equations, the time-varying parameters for parabolic equations can be obtained. This method can effectively improve the accuracy of the SPM under high C-rate charge and discharge conditions. Assuming a parabolic curve for the distribution in lithium-ion concentration can result in inaccurate modeling, leading to system errors.
To speed the calculation process for PDEs in mechanism models, many scholars have attempted this in multiple directions, among which the recent research directions include a physics-based equivalent circuit [
18,
19] and order-reduction methods [
20]. Li Y et al. [
19] started from the P2D model, used FVM to divide the battery into multiple elementary sections (ESs), and established equivalent circuit models for equations in the P2D model. This method can achieve a solution with high-precision results. However, the establishment of this model is relatively complex. Gopalakrishnan et al. [
20] utilized reduced-order models (ROMs) for LIBs and improved the efficiency of the singular value decomposition (SVD) step. However, the order reduction also resulted in the model’s loss of details and nonlinear behavior. The emergence of physics-informed neural networks (PINNs) [
21,
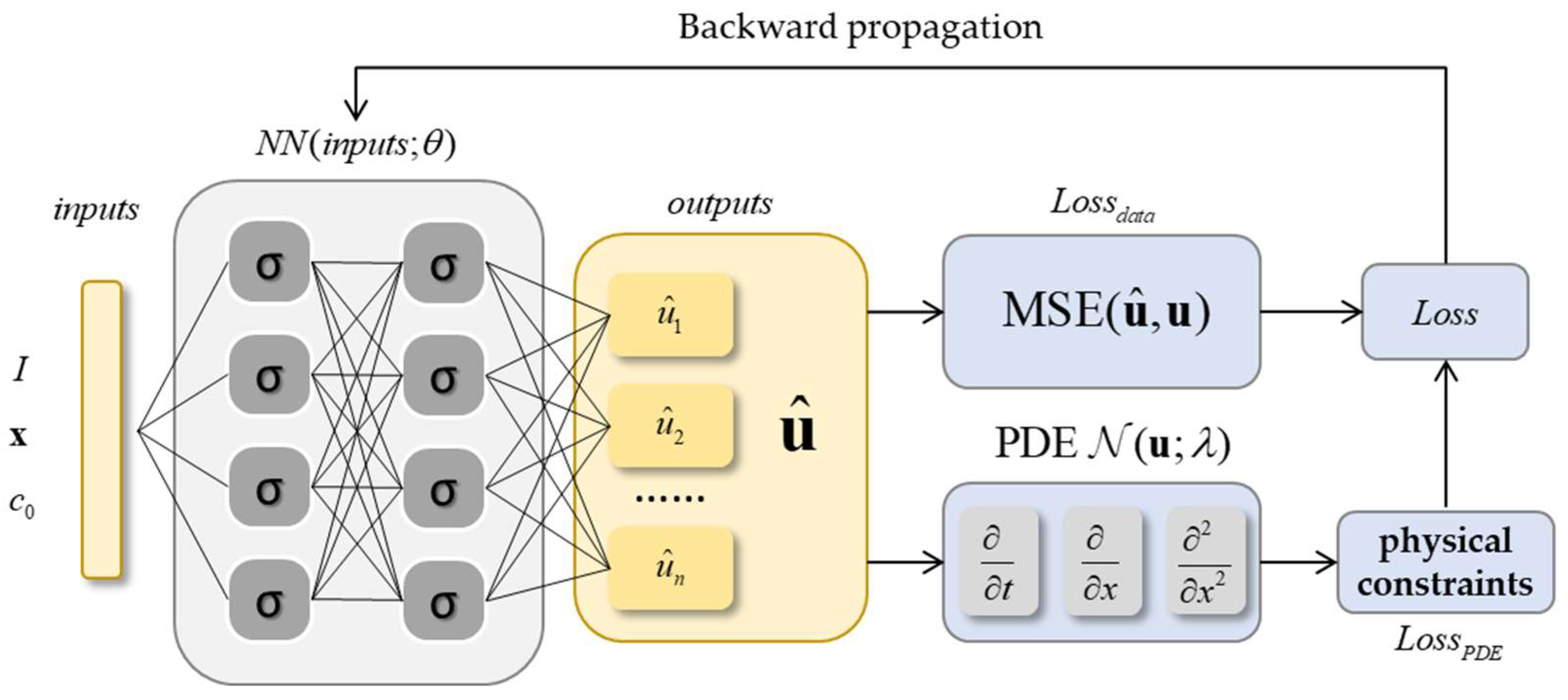
22] inspires the design of a LIB model that considers both calculation accuracy and efficiency. PINN was first proposed by Raissi et al. in 2018 [
21]. This article explored using neural networks’ nonlinear function-fitting capabilities to solve physical problems described by PDEs. When managing PDEs, these equations often provide additional physical constraints that the neural network must consider. This is where PINN surpasses traditional neural networks, as it considers both data approximation and the information of PDEs when constructing the loss function. Training the neural network this way will lead to faster convergence and better generalization performance [
22]. PINN has been successfully applied to many practical problems [
23,
24]. The excellent learning ability of PINN for the prior knowledge of physics provides a fast method for solving these complex PDEs. Misyris et al. [
24] used PINN to predict the operation state of a power system, such as rotor angle and frequency. Chen et al. [
23] designed WaveY-Net to calculate the electromagnetic field distribution in the structural medium to optimize and verify photonic devices. The network design is based on the classical encoder–decoder architecture and is realized by U-net based on a convolutional neural network. WaveY-Net only predicts the distribution of the magnetic field and uses Maxwell equation to calculate the electrical field, thus constraining the output of the neural network by physical information. WaveY-Net’s calculation speed is two to four orders faster than traditional methods.
There are also relevant studies using PINN [
25,
26,
27,
28] in the field of batteries. Li et al. [
25] used 2d-LSTM to build a state observer for the key parameters for the P2D model. The network input is the voltage, applied current, temperature, and other sequence data during battery operation. The outputs are five key parameters for the battery model, one being the lithium-ion concentration. The highlight of this research is that it uses the simulation data from the P2D model calculated by FVM as the data set, which provides an idea for the application of PINN in the field of batteries. Pang et al. [
26] used the PINN and constructed the bidirectional LSTM (BiLSTM) network model based on the Bayesian optimization algorithm (BOA) to predict the heat production rate (HGR) of the battery under specific applied current, a method that achieved good results. However, these mentioned researchers just drew lessons from the PINN because they did not use the additional physical constraints brought by the electrochemical model in constructing the loss function of neural networks. The training of neural networks in these studies relies more on the fitting of simulated data, which limits the ability of these networks to learn the mechanism of LIBs. Ref. [
28] utilized physics-informed neural networks as a solver for the PDE of lithium-ion concentration diffusion in electrode particles. The established battery model was then used to estimate the battery’s state-of-charge (SOC) and state-of-health (SOH). In training the PINN network, the fully connected network (FCN) is used as the architecture of the PINN to approximate the particle concentration distribution of electrode particles under certain applied currents. Compared with other articles that describe constructing the loss function [
25,
26], it considers the physical constraints of differential equations and their boundary conditions. The network has a simple structure and only takes in particle radial coordinates R and time T as inputs. As a result, it can only learn about the lithium-ion diffusion process under specific applied current and electrochemical parameters, which severely restricts the application of the LIB model; when the applied current of the battery changes, the network needs to be retrained. Networks described in Ref. [
29] can take any current sequence as input and output the terminal voltage of the cell. However, this method treats the battery as a black box and does not consider the mechanism of the battery. Therefore, it can only be an aging-independent model.
In contrast, our approach builds a LIB model using a recurrent neural network (RNN) as the architecture of the PINN and is based on the SPM. The network’s inputs are the coordinates x, initial lithium-ion concentration
, and applied current I. This network, called SPM-Net, is used as a solver of the diffusion equation in the electrolyte. Compared with the network described in Refs. [
28,
29], this network can solve the distribution of electrolyte lithium-ion concentration under various applied current conditions, which has stronger adaptability and is extensible. The main contributions of this paper are as follows:
- (1)
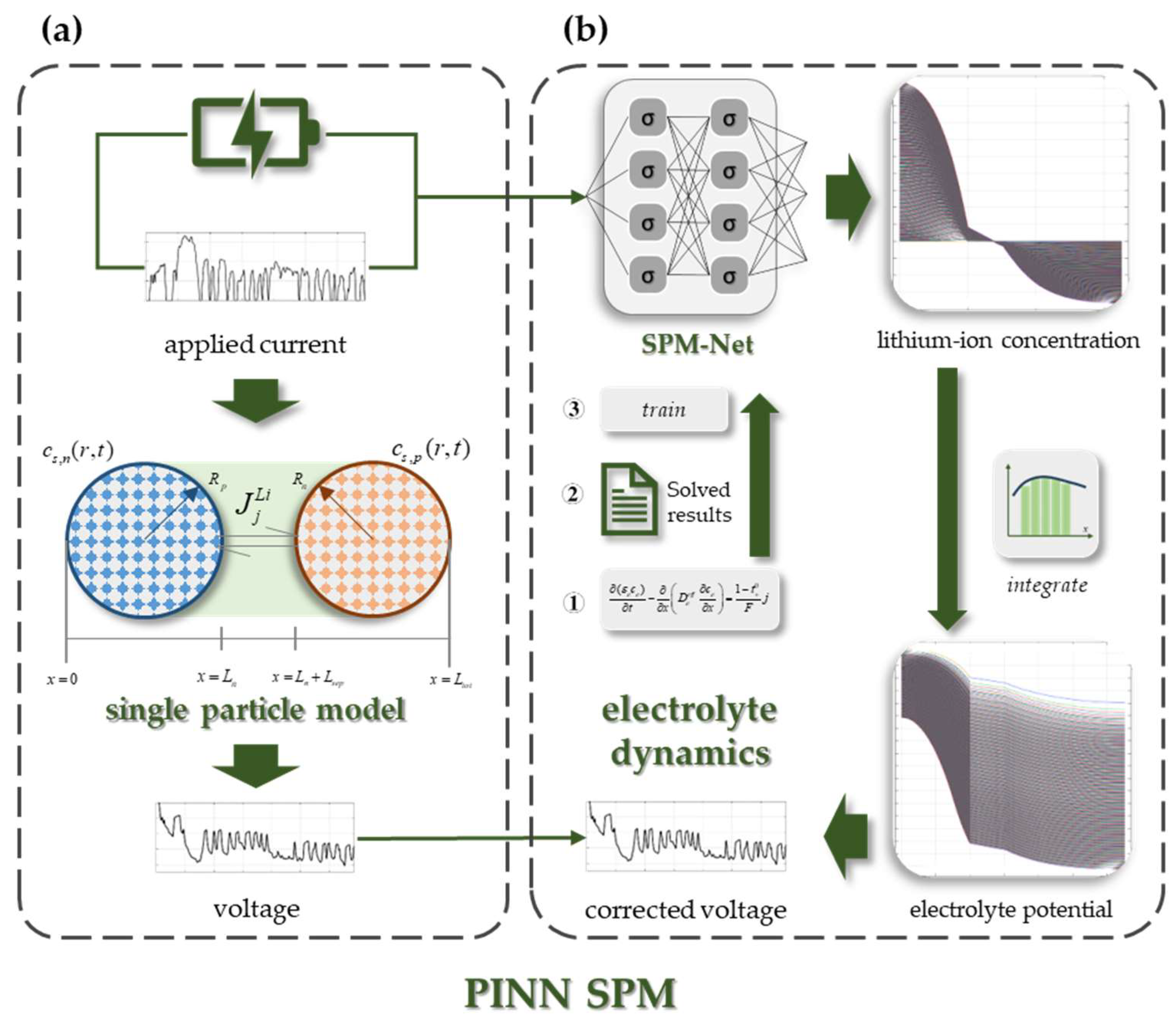
Establishment of an SPM with electrolyte dynamics called PINN SPM. This model greatly improves the accuracy of the SPM under high C-rates. It uses a PINN to approximate the lithium-ion distribution in electrolytes and then calculates the electrolyte potential distribution so that the error of the SPM can be eliminated.
- (2)
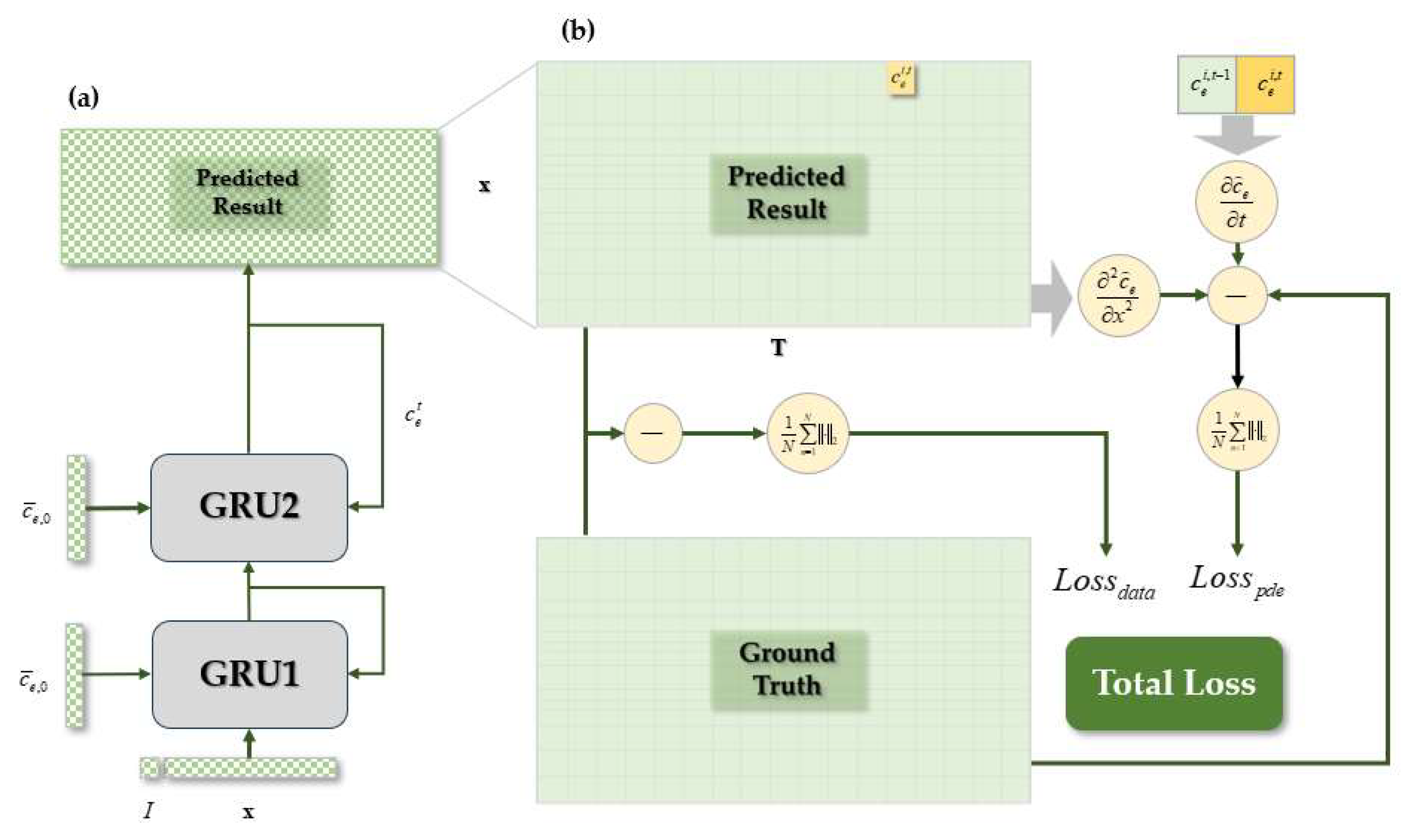
Creation of a physics-informed neural network called SPM-Net, which is the central part of PINN SPM. It can quickly solve the one-dimensional diffusion equation of the LIB model, which means the network can approximate the electrolyte lithium-ion concentration distribution under various applied currents with specific battery parameters.
- (3)
Better performance of the battery electrochemical model. Using the physical constraints from PDE to design the loss function, SPM-Net can approximate the concentration results more accurately than the traditional neural network under dynamic conditions. Additionally, it is 20.8% faster than the traditional numerical method under dynamic conditions.
The remainder of this paper is organized as follows.
Section 2 introduces the PINN SPM proposed in this paper.
Section 3 introduces the structure of SPM-Net, data preparation, loss-function design approach, and training details of SPM-Net. The following part,
Section 4, analyzes the accuracy and calculation efficiency of the PINN SPM compared with other methods. The conclusion of this paper is provided in
Section 5.
6. Conclusions
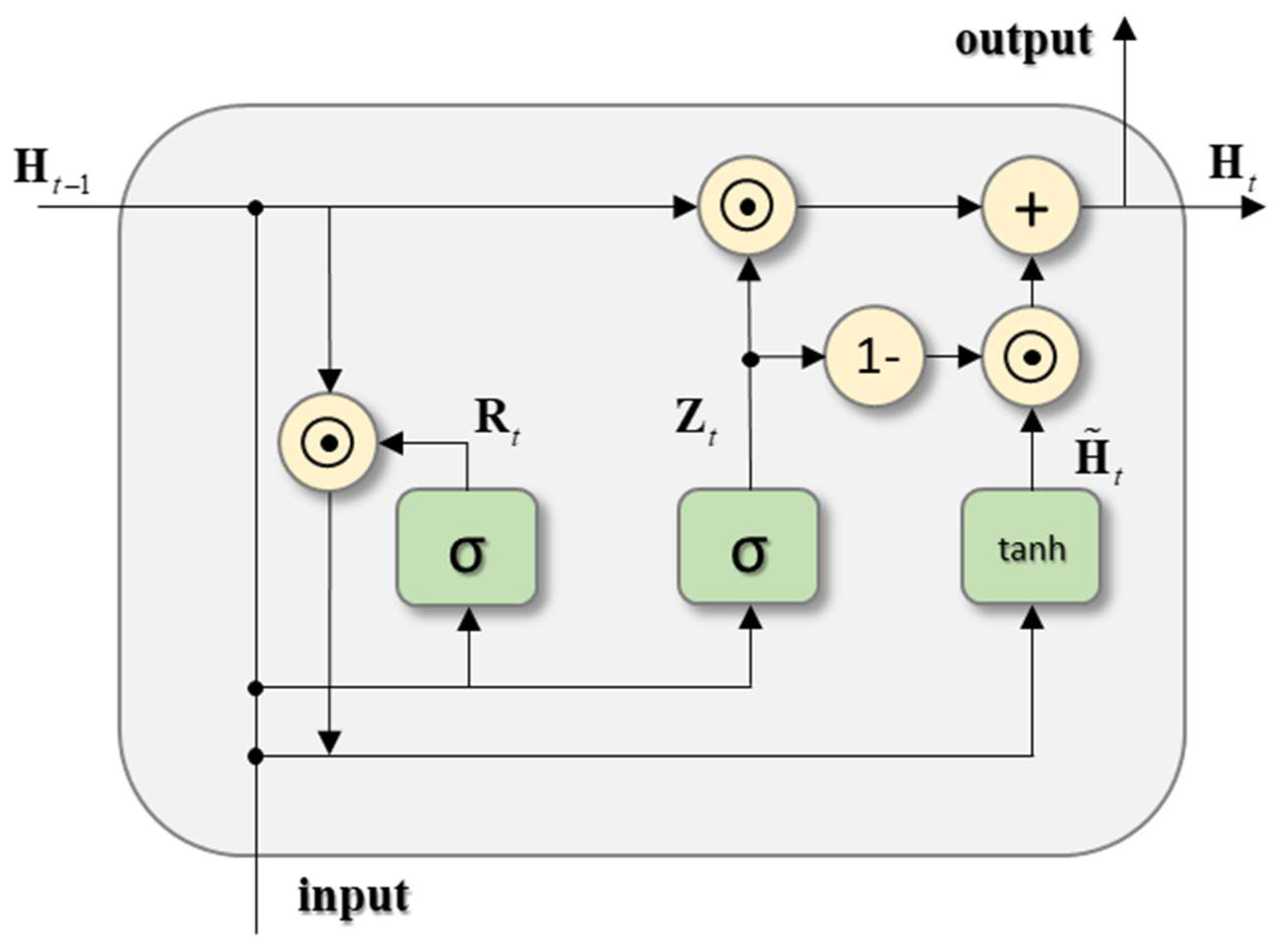
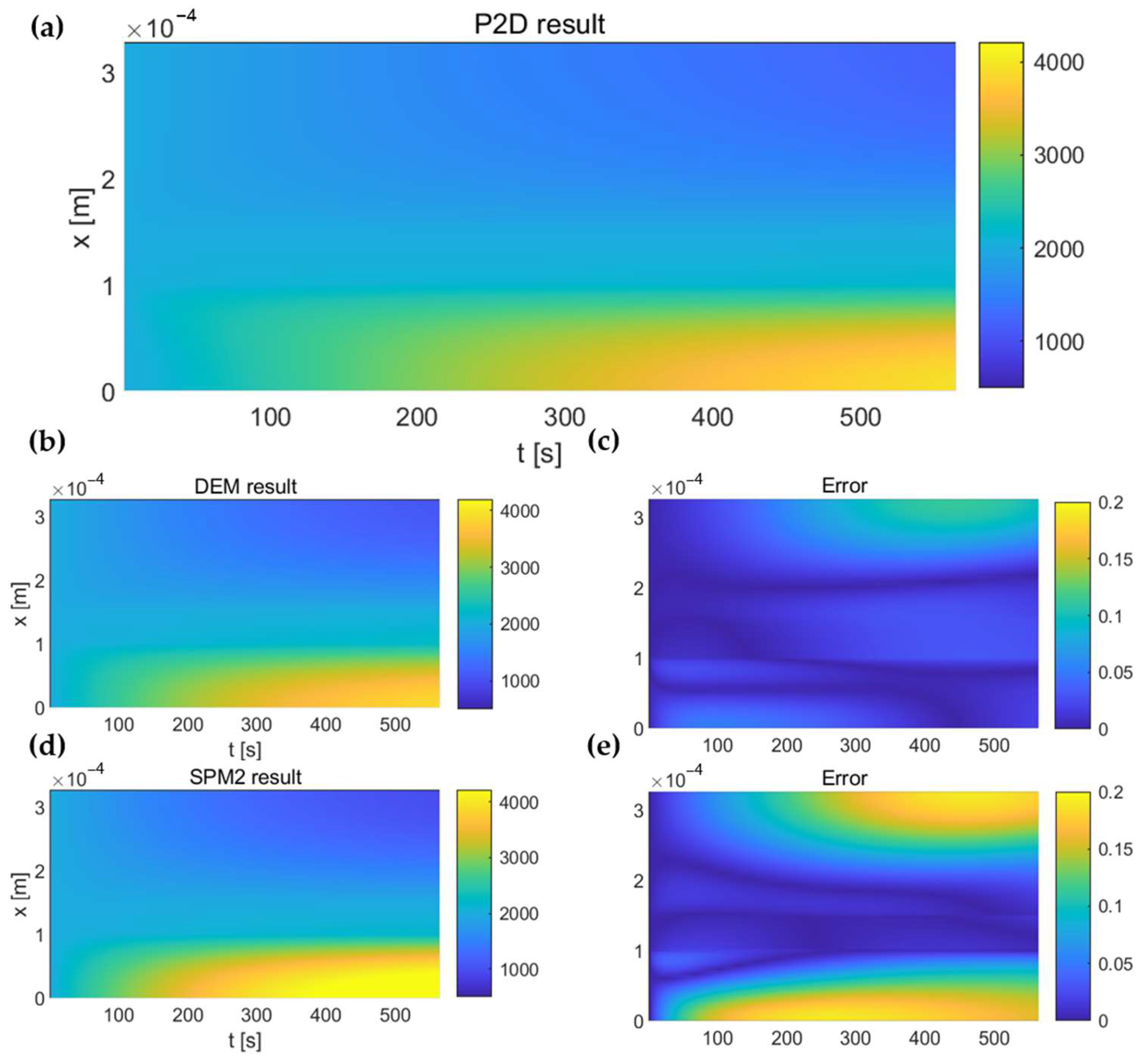
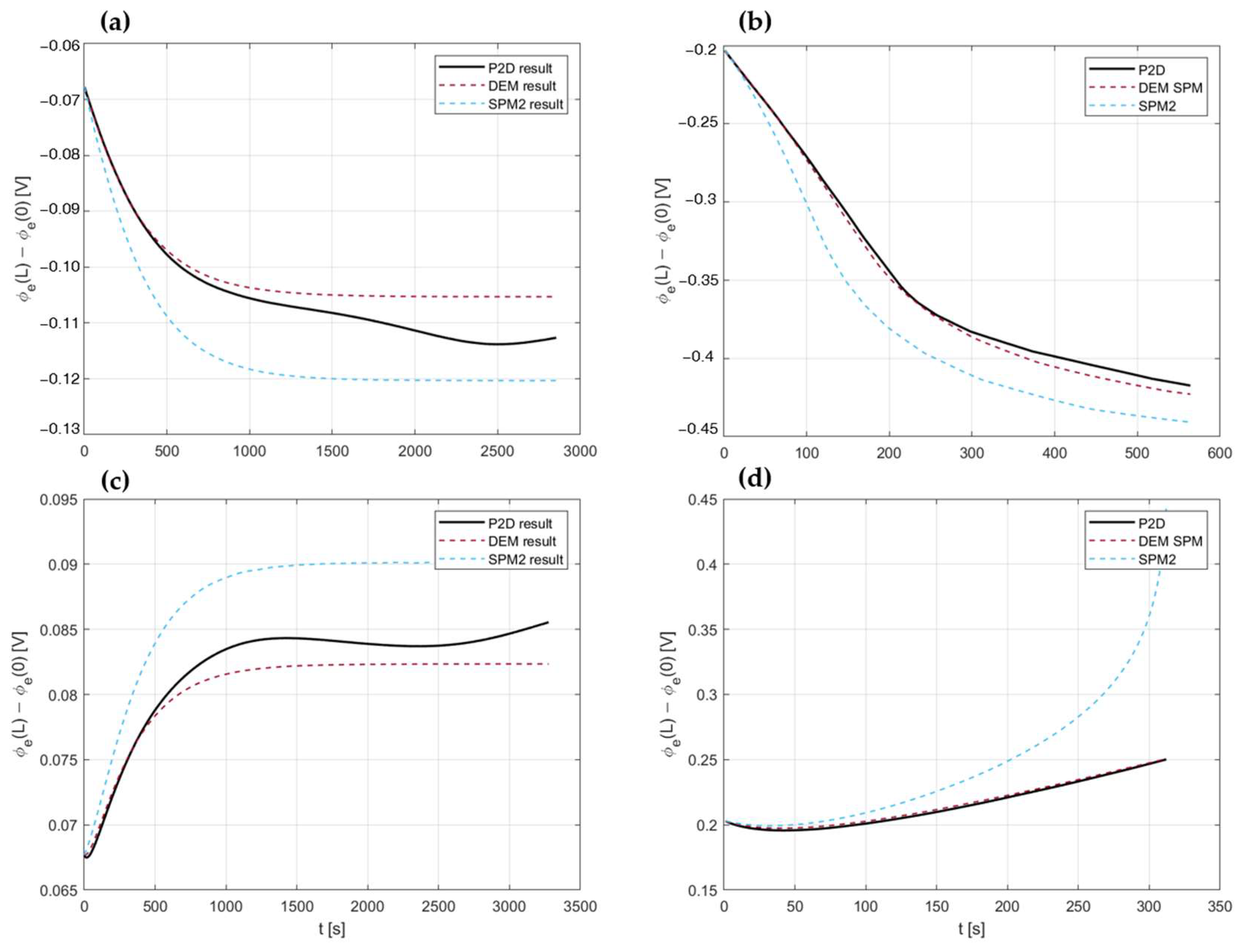
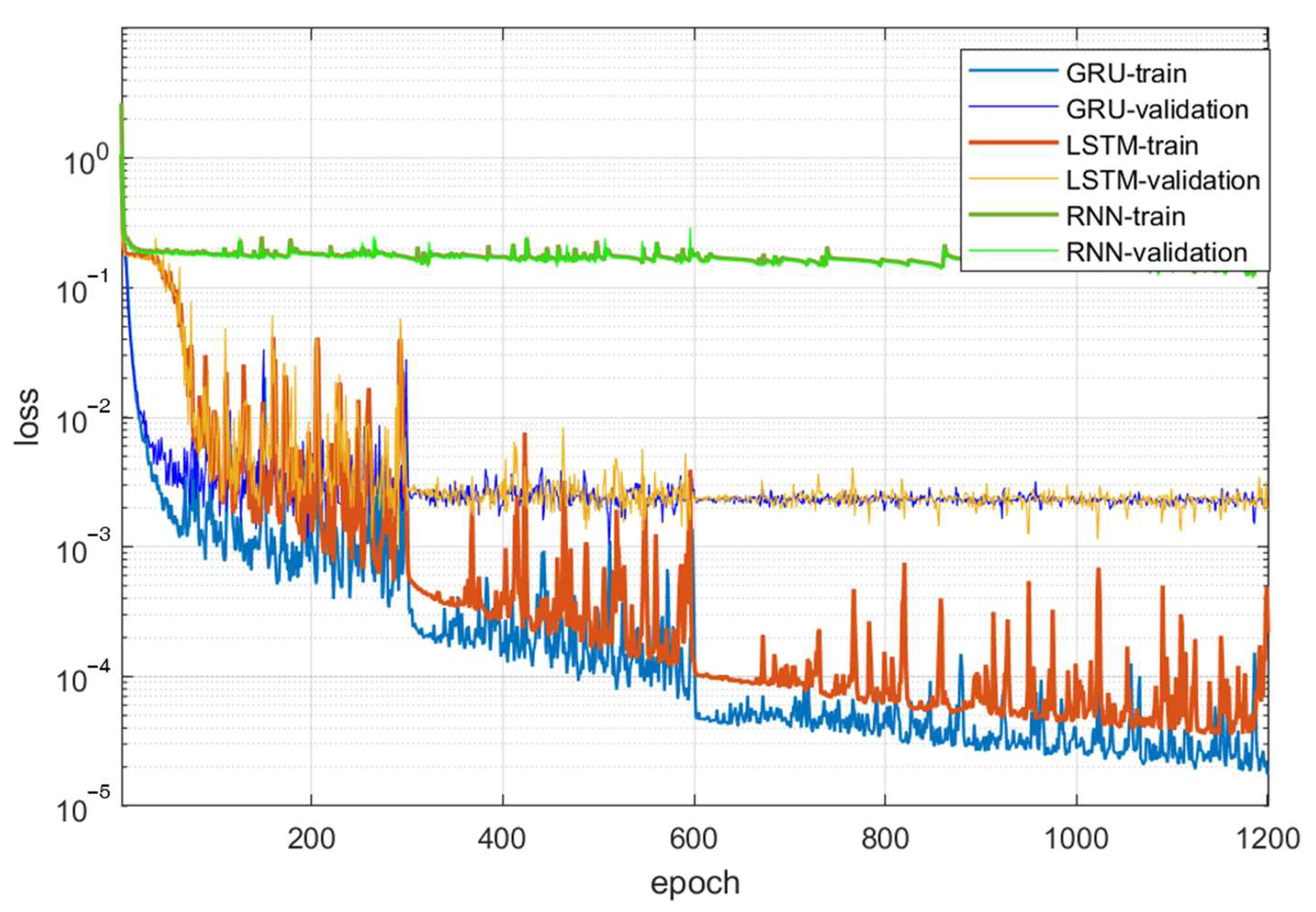
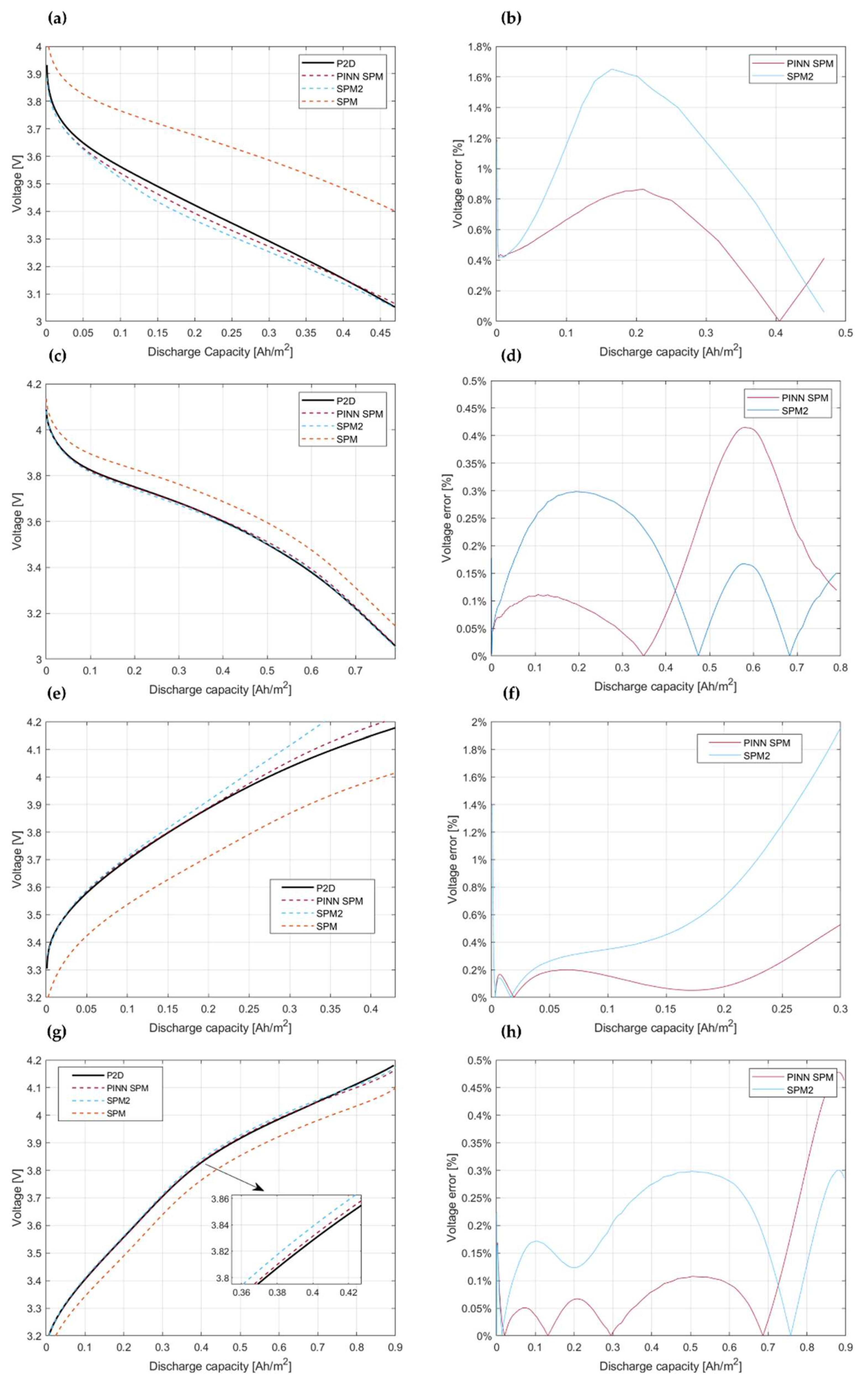
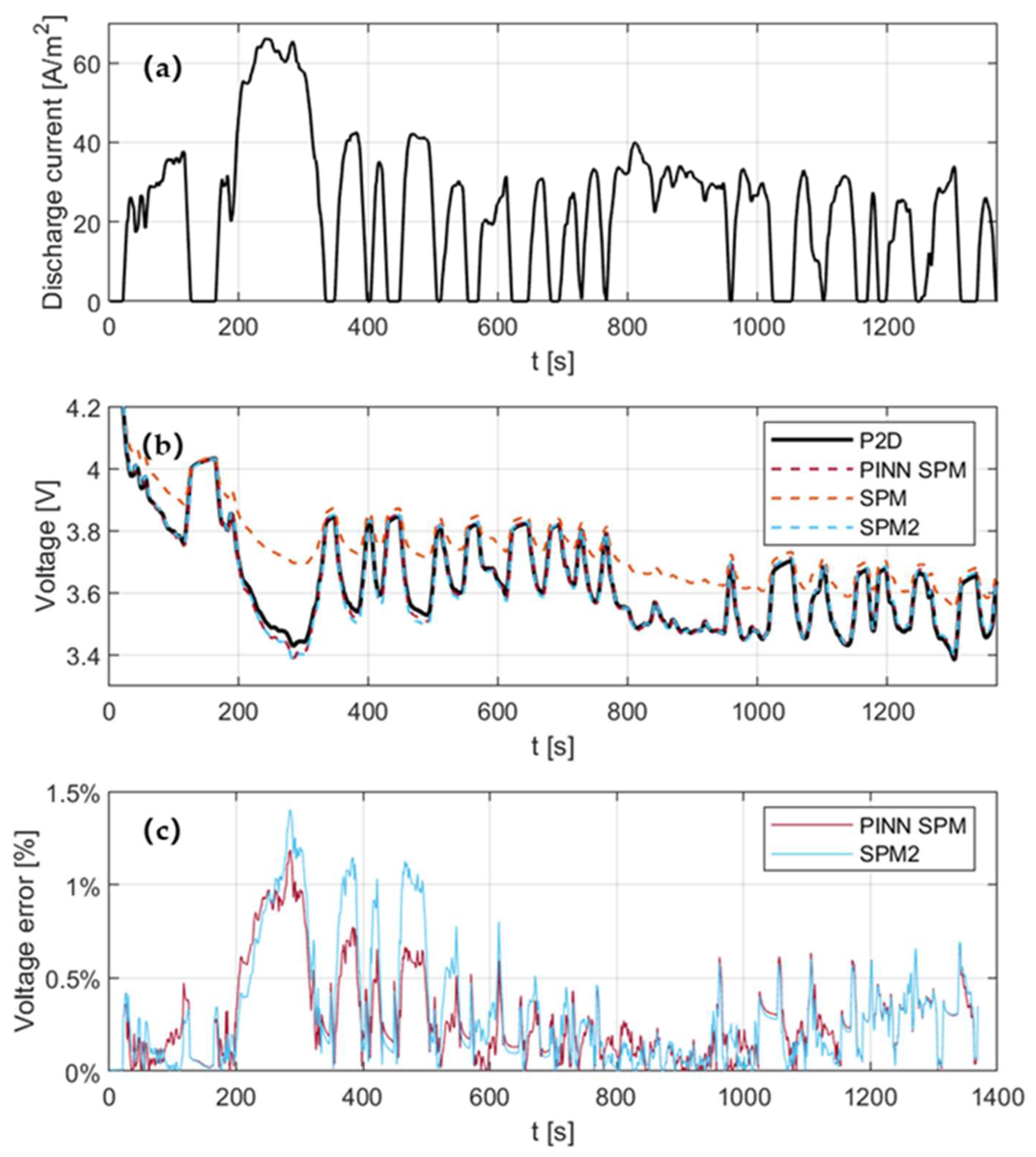
This paper proposes a more accurate SPM with electrolyte dynamics at high C-rates, called the PINN SPM, which has achieved good results compared with the traditional SPM with electrolyte dynamics. Firstly, a more accurate lithium-ion concentration distribution in the electrolyte can be obtained by solving the diffusion equation. Then, a GRU-based PINN called SPM-Net is designed to speed the solution of the diffusion equation. The PINN method exhibits better generalization performance compared to traditional neural networks under dynamic current conditions. Using SPM-Net as the solver for the diffusion equation, the calculation time of the battery model is 20.8% faster than that of the traditional method under dynamic conditions. Compared with the traditional SPM with electrolyte dynamics, the calculation accuracy of this model is higher, and the maximum relative error of the PINN SPM is less than 1.2% under dynamic and static charge conditions.
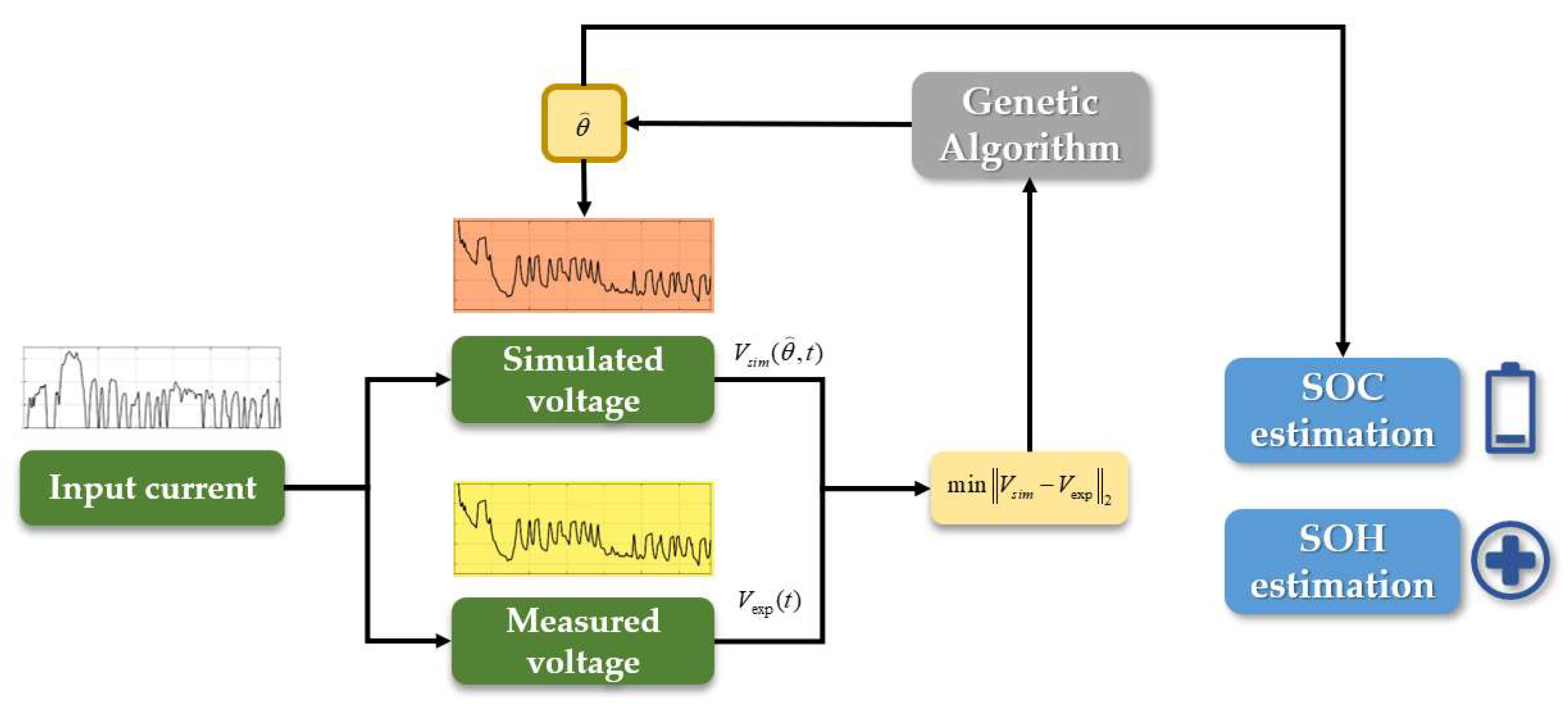
Nevertheless, the model proposed in this paper also has some drawbacks. For instance, the PINN SPM is higher in accuracy than the SPM2, but not in efficiency. Therefore, in future research, we plan to refine the SPM-Net architecture further to achieve improvements in both accuracy and efficiency. In addition, in the process for establishing the model, the PINN SPM only used simulated data and did not establish a connection between the model and the experiments. Therefore, establishing a PINN SPM based on the experimental data of the battery is also an important plan for future research. The purpose of all the modeling work for the LIB is to improve management. A genetic algorithm can be used to achieve parameter identification based on the model from experimental data. Then, by inputting these identified parameters as extracted features into the SOH and SOC estimation model, a hybrid method for BMS application can be finally achieved.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}