1. Introduction
The displacement of one fluid by another is a flow process with implications to engineering, industrial and medical applications. Many of these displacement flows involves non-Newtonian fluids and fluid pairs with large viscosity contrasts [
1,
2,
3,
4,
5]. While non-Newtonian fluid properties, such as shear-thinning or yield stress behavior, can be deliberately introduced into fluids to improve the displacement process, the resulting non-linearity complicates the analysis of the displacement. Of particular importance for several industrial applications is the ability to predict the stability of the interfacial dynamics of a certain displacement process [
6,
7], i.e., to predict the dissipation of interfacial waves [
8]; whether the amplitude of perturbations to the flow will grow or dissipate over time [
9]; and to analyze the velocity field and energy transformation around a Taylor bubble [
10]. Example instabilities include the classical Rayleigh–Taylor and Saffman–Taylor instabilities, which are associated with density- and viscosity-unstable conditions. The topic of the current study is the upward displacement of a viscous, non-Newtonian fluid by a less viscous Newtonian fluid, and is therefore connected to the Saffman–Taylor instability where fingers of the displacing fluid may penetrate into the more viscous, displaced fluid [
11,
12].
Viscous fingering and related instabilities have frequently been studied in Hele-Shaw cells that consist of wide parallel plates separated by a narrow gap,
h. It follows from momentum conservation that the mean velocity,
, of a Newtonian fluid in a Hele-Shaw cell is
, with
the fluid viscosity and
p is the pressure. This equation is identical to the so-called Darcy equation that is often used when studying non-inertial flow in permeable porous media, with
corresponding to the media permeability [
12,
13]. The Hele-Shaw geometry therefore represents an attractive and relevant measurement geometry for studying porous media displacements, which are important for optimizing increased oil recovery processes or the geological sequestriation of carbon dioxide.
The stability of the interface between two superposed fluids that are subject to a pressure gradient was studied in the classical paper of Taylor and Saffman [
11]. For Newtonian fluids and in the absence of gravity and interfacial tension, the flow becomes unstable to linear perturbations when the displacing fluid is less viscous than the displaced fluid [
14], resulting in the penetration and growth of viscous fingers into the displaced fluid. In upward, vertical flow in the presence of gravity, a density difference between the fluids will also affect the stability of the flow by suppressing viscous fingering when the lower, displacing fluid is denser than the displaced fluid. Denoting the
displaced, upper fluid by 2 and the
displacing, lower fluid by 1, the displacement becomes unstable to perturbations when
, as shown by, e.g., Leal [
14]. Here,
and
correspond to the density and permeability of fluid
i, respectively,
g is the gravitational acceleration and
is the magnitude of the imposed flow velocity. As pointed out above, for a Hele-Shaw cell of uniform gap width,
, and
corresponds to the (unperturbed) friction pressure gradient of fluid
i. As such, the displacement becomes unstable when the “modified” pressure gradient of the displaced fluid exceeds that of the displacing fluid. According to this criterion, a density-unstable configuration (
) can be stabilized by viscosifying the displacing fluid:
. Similarly, a viscosity-unstable configuration (
) can be stabilized by increasing the density of the displacing fluid:
[
15]. In this study, we will connect this stability criterion to the density-stable and viscosity-unstable displacement of a shear thinning fluid.
The Hele-Shaw geometry and the Saffman–Taylor instability is relevant also for fluid displacements in narrow annulus geometries. Indeed, to leading order in the gap width, displacements in a narrow, eccentric annulus can be approximated by displacements in an equivalent Hele-Shaw cell of varying gap-width [
5,
9,
14]. The cementing of casing strings during well construction is an example of annular fluid displacement with significant industrial and environmental importance. The cementing operation involves displacement of a drilling fluid from the annulus, and the placement of a cement slurry that should form a barrier for zonal isolation behind the cemented casing string. To prevent instabilities and optimize the displacement efficiency, industry guidelines for displacements in vertical or inclined annuli generally recommend that the displacing fluids should be denser and exert a greater friction pressure than the fluids they displace [
16]. While gravity will act to stabilize displacements in vertical and inclined geometries (the displacing cement slurry being denser and displacing lighter fluids upward), the viscosity hierarchy between fluids is considered particularly important for the cementing of horizontal and near-horizontal annuli. Indeed, within a lubrication scaling, Carrasco-Teja et al. showed that conditions for the existence of steady displacements in horizontal annuli is given entirely by the viscosity of the two fluids [
17].
Since the classical work by Taylor and Saffman [
11], many experimental studies have explored the growth of viscous fingering instabilities and displacement mechanics in the Hele-Shaw cell geometry. In a comprehensive review, Homsy illustrated the morphology of viscous fingering at the liquid interface for both miscible and immiscible displacement in Hele-Shaw cells [
12]. The dynamics of viscous fingering, i.e., splitting, shielding, spreading and its relevant dimensionless numbers were discussed in detail. McCloud and Maher made an in-depth experimental study on the perturbations to viscous fingering with a Hele-Shaw cell [
18]. Density-stable downward displacements of Newtonian liquids in a vertical Hele-Shaw cell was studied experimentally and theoretically by Lajeunesse et al., who focused on sufficiently high flow rates for capillary effects to be small [
19]. In this limit, the interface that separates the fluids does not necessarily span across the gap of the Hele-Shaw cell, and the profile of the interface may develop inside the gap. Using a lubrication scaling [
19], derived a hyperbolic conservation equation for the gap-wise shape of the interface, and predicted three qualitatively different interface shapes depending on the viscosity ratio between the fluids, and the ratio of viscous to buoyant forces. Subsequently, Fernandez et al. explored density-driven flow and instability in a similar vertical Hele-Shaw cell [
20]. Haudin et al. further studied buoyancy-driven instabilities in viscously stable miscible displacements within a horizontal Hele-Shaw cell [
21]. An et al. in their recent work studied miscible viscous fingering in a sealed Hele-Shaw cell, where they explored how different parameters can effect the viscous finger dynamics, and identified different flow regimes and their fingering characteristics [
22].
As the Saffman–Taylor instability is strongly linked to the viscosity of the two fluids, one can expect non-Newtonian properties in either of the two fluids to impact the displacement stability and the criterion for onset of viscous fingering instability. A linear stability analysis for the displacement by air of an Oldroyd ’Fluid B’ model or a power law fluid was performed by Wilson [
13]. shear-thinning was found to modify the growth rate of perturbations to the fluid-fluid interface by a factor of
, with
n being the flow behavior index of the displaced, power law fluid [
13]. Subsequently, Mora and Manna performed a linear stability analysis involving two non-Newtonian fluids in a horizontal Hele-Shaw cell [
23], and for air displacing a viscoelastic Maxwell fluid [
24]. From a Darcy relation for generalized Newtonian fluids, their linear stability analysis showed that interfacial perturbations grow when the unperturbed pressure gradient of the displaced fluid exceeds that of the displacing fluid and the stabilizing effect of interfacial tension [
23]. Thus, this stability criterion for generalized Newtonian fluids is analogous to that of Newtonian fluids, as discussed above.
An experimental investigation of the impact of non-Newtonian viscosity on viscous fingering instability was reported by Lindner et al., who performed experiments with solutions containing rigid (shear-thinning) or flexible (elastic) polymer solutions [
25]. Their results showed that a modified Darcy equation could explain the relative finger width observed in solutions with low polymer concentration [
25]. A recent experimental study considered displacements involving a Newtonian mineral oil and aqueous shear-thinning liquids in a horizontal Hele-Shaw cell [
26]. The experiments showed that a transition from viscous fingering to stable plug displacement occurred for viscosity ratios between displacing and displaced fluid of approximately 2.25–2.5. That is, fingering instabilities could still occur even if the viscosity of the displacing fluid is more than twice that of the wall viscosity of the displaced fluid. Varges et al. attributed these observations to the shear-thinning property of the aqueous solution, i.e., the existence of viscosity gradients across the gap in the Hele-Shaw cell, with the shear-thinning fluid having a significantly larger effective viscosity close to the center of the gap compared to at the walls [
26]. We remark that these observations appear to be (at least qualitatively) in agreement with the stability criterion developed by Mora and Manna [
23], which relates the stability of the to unperturbed
friction pressure gradients and not the fluid viscosity function directly. Even more recently, Jiang et al. performed an experimental study that investigated the effect of polymeric liquid additives on the onset of viscous fingering as well as finger shapes [
27]. Their results confirmed the observations of the previous study, i.e., that viscous fingering may occur even when the displaced, shear-thinning fluid has an effective viscosity less than the viscosity of the displacing, Newtonian fluid, and that this is linked to the viscosity gradient in the gap [
27]. Further, and as discussed by, e.g., Lindner et al. [
28], it has been observed that rigid polymers and flexible polymers affect finger width differently: Rigid polymer solutions that exhibit viscous fingering, tend to develop narrower fingers at higher imposed velocity due to shear thinning at the finger tip. This results in lower local viscosity at the tip and easier growth of a narrow finger. Flexible polymer solutions, on the other hand, show larger resistance to elongation and a tendency for developing wider fingers [
28].
Finally, we comment that recent work has also investigated impacts of surfactants on viscous finger formation at the interface between immiscible fluids. Bonn et al. showed that addition of surfactants increased the width of the viscous finger formed as heptane displaced water [
29]. This observation can be explained by surface tension anisotropy along the interface caused by a competition of advection and adsorption of surfactant molecules, resulting in maximum surface tension at the tip and minimum at the sides, [
29]. Ahmadikhamsi et al. recently studied the combination of surfactants and non-Newtonian viscosity on viscous fingering in a radial Hele-Shaw cell where an aqueous polymer solution displaced a viscous oil [
30]. Similar to the case with Newtonian fluids, this study also found a tendency for wider-finger formation caused by surface tension anisotropy. In contrast to Newtonian displacements, shear thinning was found to increase the finger width for increasing flow rate [
30]. Research efforts on theoretical and physical principles regarding the effects of the addition of surfactants on viscosity and forces at the interface, as well as the interfacial rheology are addressed in, e.g., Refs. [
31,
32,
33,
34], and a comprehensive review of surfactant dynamics was provided by Manikantan and Squires [
7].
As addressed in recent literature, additional experimental and theoretical studies on the subject are required to evaluate criteria for onset of viscous fingering instabilities, and the resulting finger morphology [
12,
18,
25], especially for displacements that involve one or more non-Newtonian fluids. In this work, we report a combined experimental and numerical investigation of the interface dynamics for the viscosity-unstable displacement of a shear-thinning fluid by a denser Newtonian fluid. The goals of this work are to connect the fingering instability to viscosity- and density-differences between the two fluids, and to qualitatively validate numerical simulations of these displacements.
4. Discussion
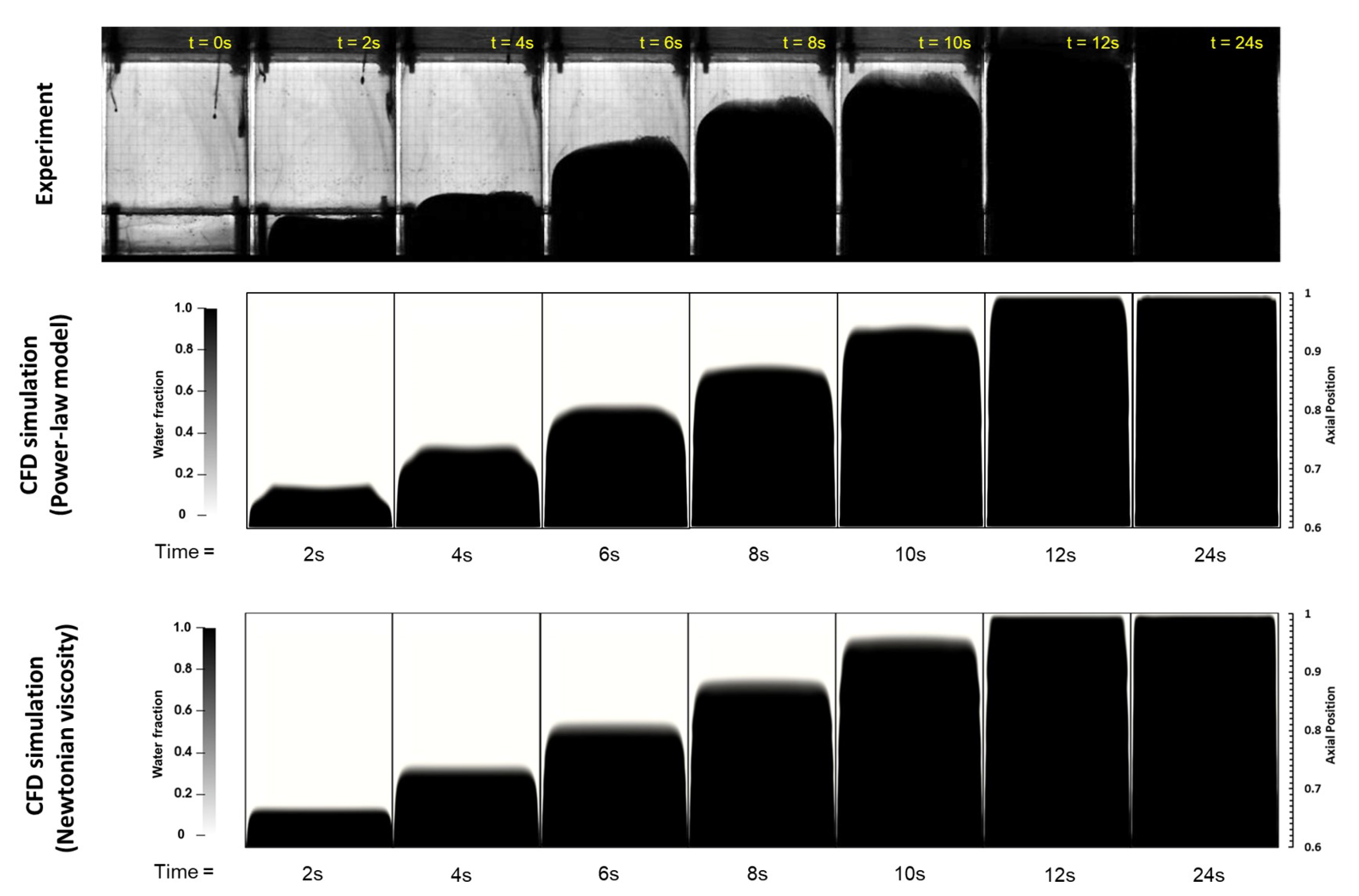
When comparing the results above from the different shear-thinning regimes, we note a significant impact of the displaced fluid viscosity on the displacement and the morphology of the fluid interface. It is obvious that the degree of shear-thinning significantly influences the development of interfacial patterns. In the weakly shear-thinning regime, the displacement of the interface is almost identical to that of displacement of a Newtonian fluid with an equivalent, effective viscosity as the original xanthan gum solution. Furthermore, no obvious viscous fingering patterns or other instabilities were identified.
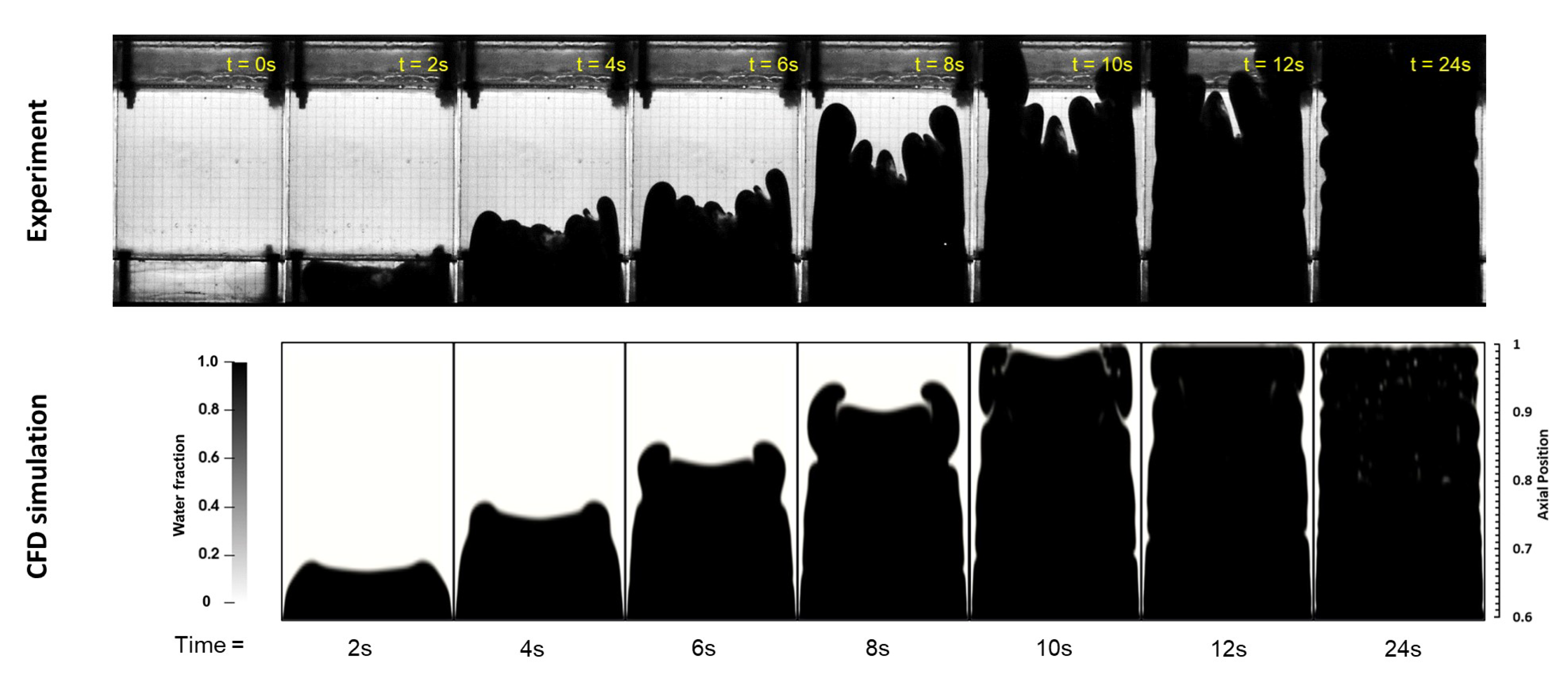
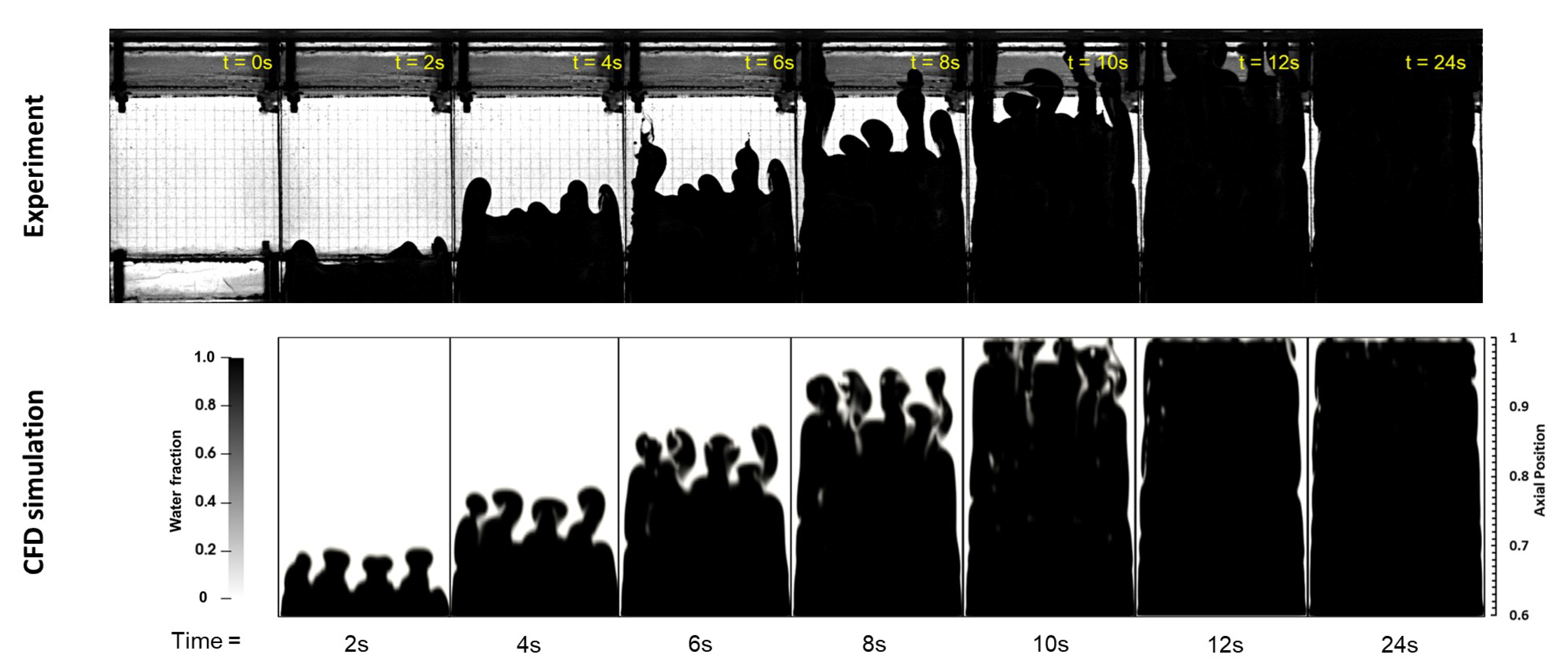
The moderate and strongly shear-thinning regimes both exhibited Saffman–Taylor type instability at the interface. In the moderately shear-thinning regime, several small finger-shaped channels formed across the interface, and the displaced fluid did not stagnate, possibly except for thin layers adjacent to the short side walls, as shown in
Figure 6 and
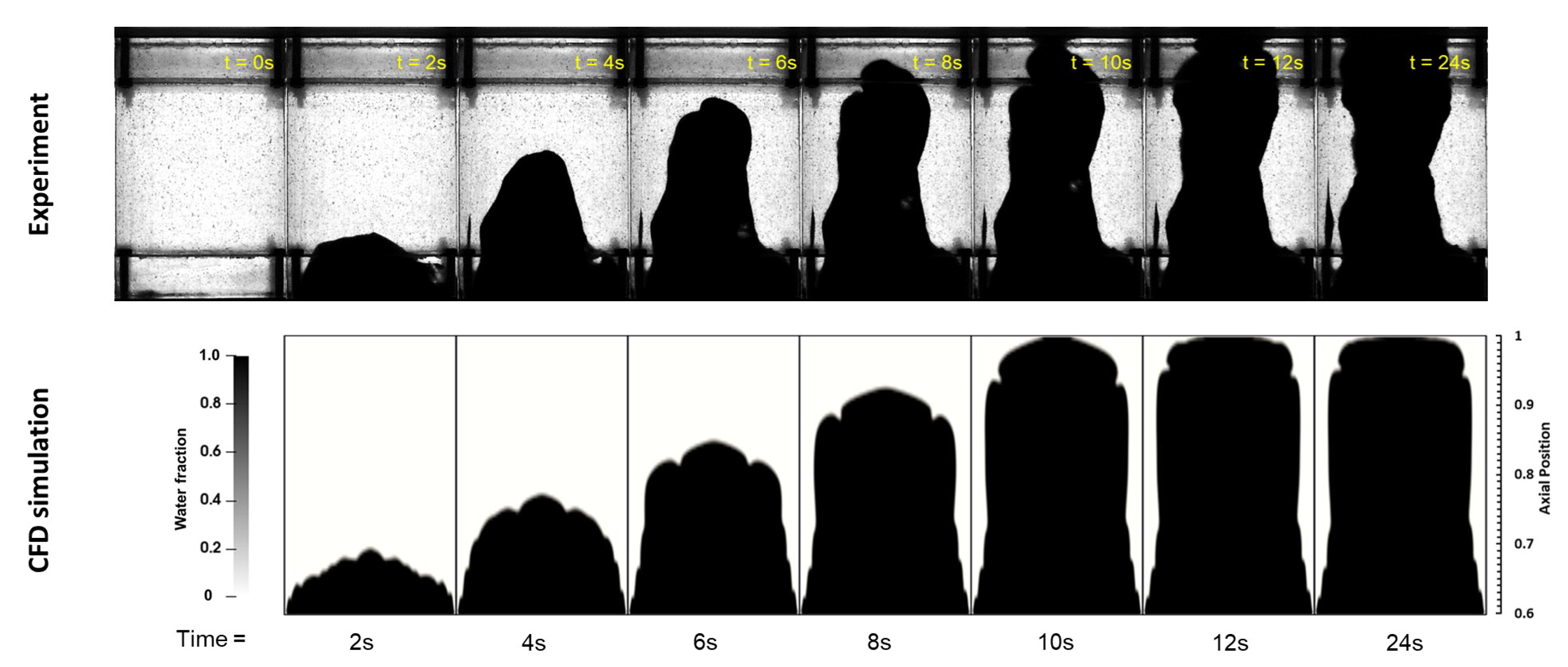
Figure 7. This allows the complete displacement of the shear-thinning fluid save for a relatively thin wall layer that displays a mild Kelvin–Helmholtz type of instability. In the strongly shear-thinning regime, the displacing fluid formed a unique channel through the displaced fluid. The displaced fluid appears to flow very slowly, if at all, on either side of the central channel. As a result, the displacing fluid accelerated through the relatively thin channel formed through the center of the duct and to the outlet. This created a relatively large wall layer and prevents the complete displacement of the duct.
We note that even if all xanthan gum solutions used for our experiments had effective viscosity greater than the displacing water, viscous fingering instabilities were only observed for the moderate and strongly shear-thinning regimes. We link this observation to the stabilizing effect of the density difference between the two fluids; as pointed out in the introduction, a density-stable fluid hierarchy will postpone the onset of viscous fingering. This is reasonable, since in a vertical channel, gravity acts to maintain a horizontal interface between the fluids. To assess the combined impact of gravity and viscosity on the stability of the displacements, we estimate and compare the “modified” pressure gradients for the (unperturbed) displaced and displacing fluid,
. The first term,
, is taken as the fully developed, laminar pressure gradient of fluid
i, and the second term is the hydrostatic component to the pressure gradient. As a first approximation, we use theoretical results for plane slot flow [
40] for calculating the friction pressure gradient of the Newtonian and the power law fluids, i.e.,:
This is only considered an approximation since, in our experiments and simulations, the duct aspect ratio was only
. As such, the side walls are expected to influence and reduce the volumetric flux for a given pressure differential. However, for the current discussion, we neglect the impact of the side walls and take Equation (
5) as a coarse approximation to the pressure gradient in the different phases. Finally, for the displacing (Newtonian) fluid, the same equation applies by replacing
and
. The resulting, approximated pressure gradients for the fluids used in this study are listed in
Table 3, along with the corresponding hydrostatic pressure gradient and the modified pressure gradient,
G.
When comparing the pressure gradient of water with that of the shear-thinning solutions, we note that the modified pressure gradient of the displacing water exceeds that of the weakly shear-thinning fluid. As pointed out above, this case did not exhibit any viscous fingering instability in either experiment or numerical simulations. We attribute the lack of viscous fingers to the stabilizing effect of the density difference between the fluids, which is reflected in the modified pressure gradient of these fluids. In the other two cases, the friction pressure gradient associated with the moderate and highly shear-thinning fluids exceed the stabilizing hydrostatic component. This makes the modified pressure gradient larger in the displaced phase, as shown in
Table 3. These two cases exhibited finger instabilities, both experimentally and in numerical simulations. Consequently, we find that our observations are consistent with a stability criterion based on the modified pressure gradients of the two fluids, similar to the classic Newtonian result [
14].
5. Summary and Conclusions
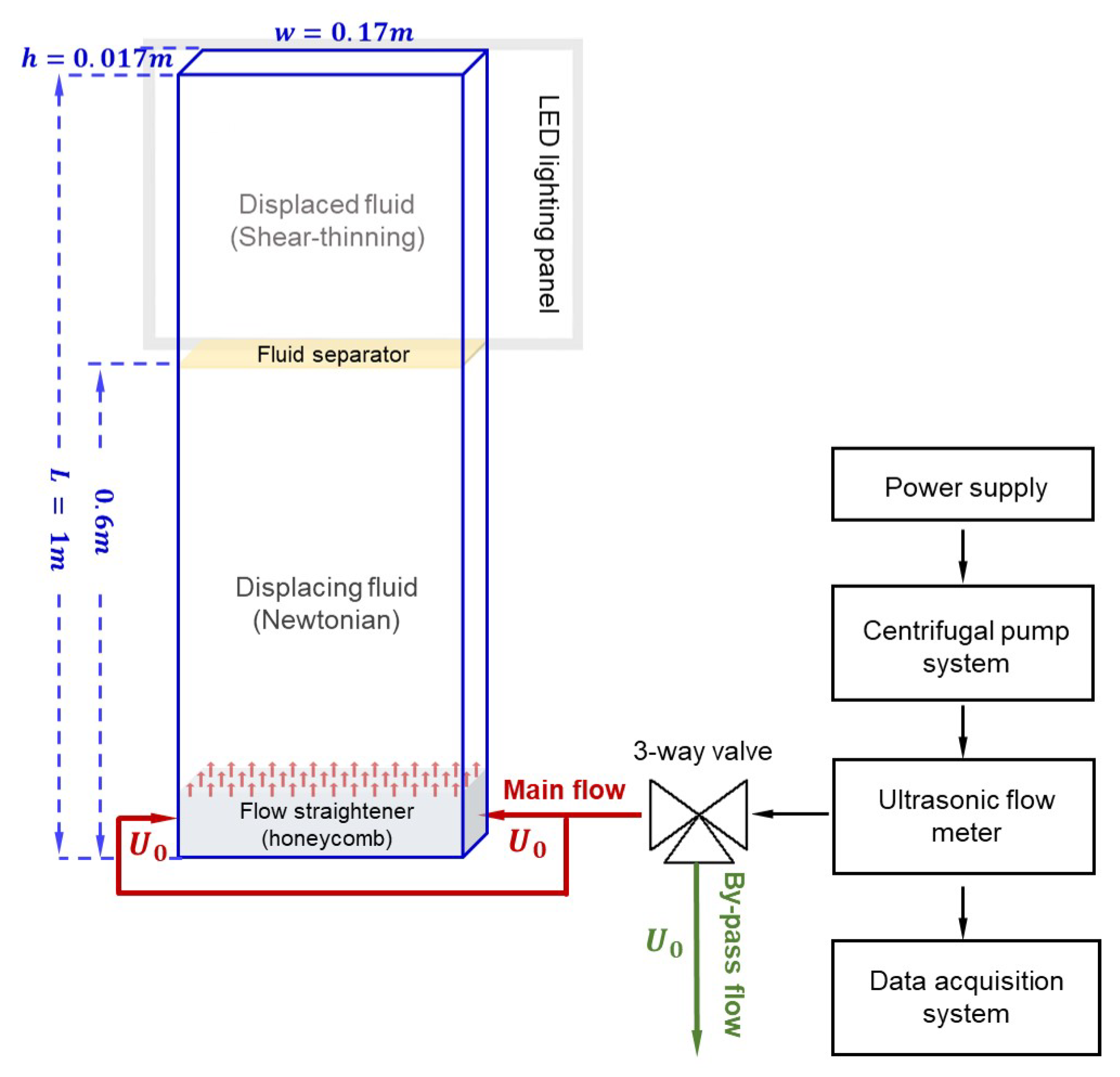
We have studied the displacement of different shear-thinning fluids by a denser but less viscous Newtonian fluid in a vertical, rectangular duct. Both experiments and fully three-dimensional numerical simulations have been performed to study the displacements, and with a particular focus on the interfacial region between the fluids and the growth of instabilities. A relatively small density difference was introduced to both examine the stabilizing effect of a positive density contrast, and also to improve repeatability of the experiments by maintaining a density-stable hierarchy at the start of the experiment. All displacement experiments and simulations were performed by imposed a fixed flow rate. We observed that the shape of the interface changed significantly as the displaced fluid was made more viscous and shear-thinning. As a result, our experiments and simulations were categorized as weakly, moderately and highly shear-thinning regimes.
The displacement in the weakly shear-thinning regime was found to be qualitatively similar to the displacement of a constant-viscosity Newtonian fluid. No obvious viscous finger formation was observed at the interface, and the displacement appeared stable, even if the fluid hierarchy was considerably viscosity-unstable. The lack of instabilities was attributed to the stabilizing effect on the interface by the density difference between the fluids. In the moderately shear-thinning regime, the displacing fluid formed several finger-shaped channels across the width of the duct. The finger structures are likely linked to the Saffman–Taylor instability, i.e., driven by the difference in viscosity of the two fluids. The displacement of shear-thinning fluid was relatively complete in this regime, leaving behind only a thin, residual wall layer. Finally, in the strongly shear-thinning regime, a central finger penetrated the displaced fluid and left behind considerable residual volume of non-displaced fluid on either side of this core.
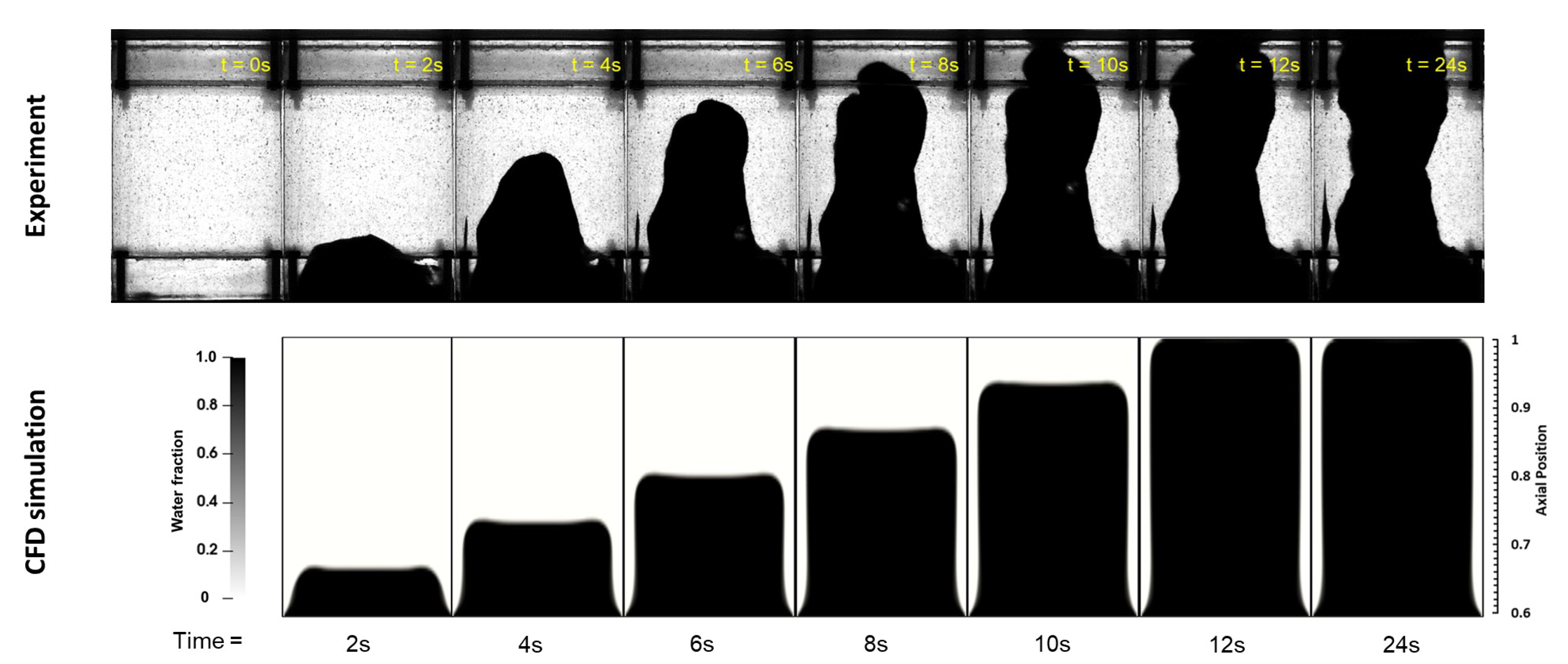
Numerical simulations have been performed using OpenFOAM, and the results compared to experimental observation for all three regimes. Simulation results and experiments are generally found to be in reasonable agreement for all three regimes. By introducing initial perturbations to the fluid interface in the numerical simulations, we observe improved agreement to the experimental results. This further suggests that the experimentally observed fingering and interface instability is indeed caused by a Saffman–Taylor type instability. Since the displaced fluid in our study is shear-thinning, the local fluid viscosity varies across the gap of the duct. Instead of linking the onset of viscous fingering instability to a specific, effective viscosity value, we instead interpret our observations in terms of the unperturbed pressure gradient within the displaced and displacing fluid phases. When accounting for the stabilizing density difference, we find that the pressure gradient is effective in predicting whether the displacement will be stable or not. This is found to be in accordance with theoretical linear stability analysis involving generalized Newtonian fluids [
23].
As pointed out above, an important observation of the current study is that the onset of displacement instability appears linked to the pressure gradient in the two fluids. This observation is also in agreement with, e.g., design rules for effective laminar displacement, where the pressure gradient within the displacing fluid should be greater than that of the displaced fluid [
16]. While the majority of past studies of the viscous fingering instability involves immiscible fluids, such as air displacing water or oil, the current study involves fluid configurations that are arguably more relevant for well construction, cementing and remediation operations.
Different interface dynamics from different shear-thinning regimes are visualized with experiments. We toned and bench marked a CFD tool that allows to generate dataset from computational experiments. With the aid of the toned computational tool, the cost of setting up experiments can be largely reduced, a wider range of displacement conditions can be investigated, and all relevant parameters can be easily altered. Thus, a more in-depth study of shear-thinning fluid displacement can be explored. Future studies will focus on in-depth analysis of the instability limit at the liquid interface for shear-thinning and other non-Newtonian fluid with data generated from the benchmarked CFD model. The selection criteria for finger-formation, and how this is linked to duct geometry and viscosity hierarchy will be explored.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}