K-Means-Based DNN Algorithm for a High Accuracy VLP System

Abstract
:1. Introduction
- For the first time, in this article, in order to achieve high-precision positioning of LED and PD-based indoor devices, we present a novel algorithm based on the combination of K-means clustering and DNNs. This algorithm achieves a better anti-interference capability and higher positioning accuracy compared with conventional DNN algorithms.
- To evaluate and analyze the performance of the proposed system, we developed and executed a comprehensive experimental framework. The VLP system exhibits an excellent performance in terms of interference resistance, and the highest millimeter-level positioning accuracy, to the best of our knowledge.
2. VLP System Model
2.1. The Channel Model
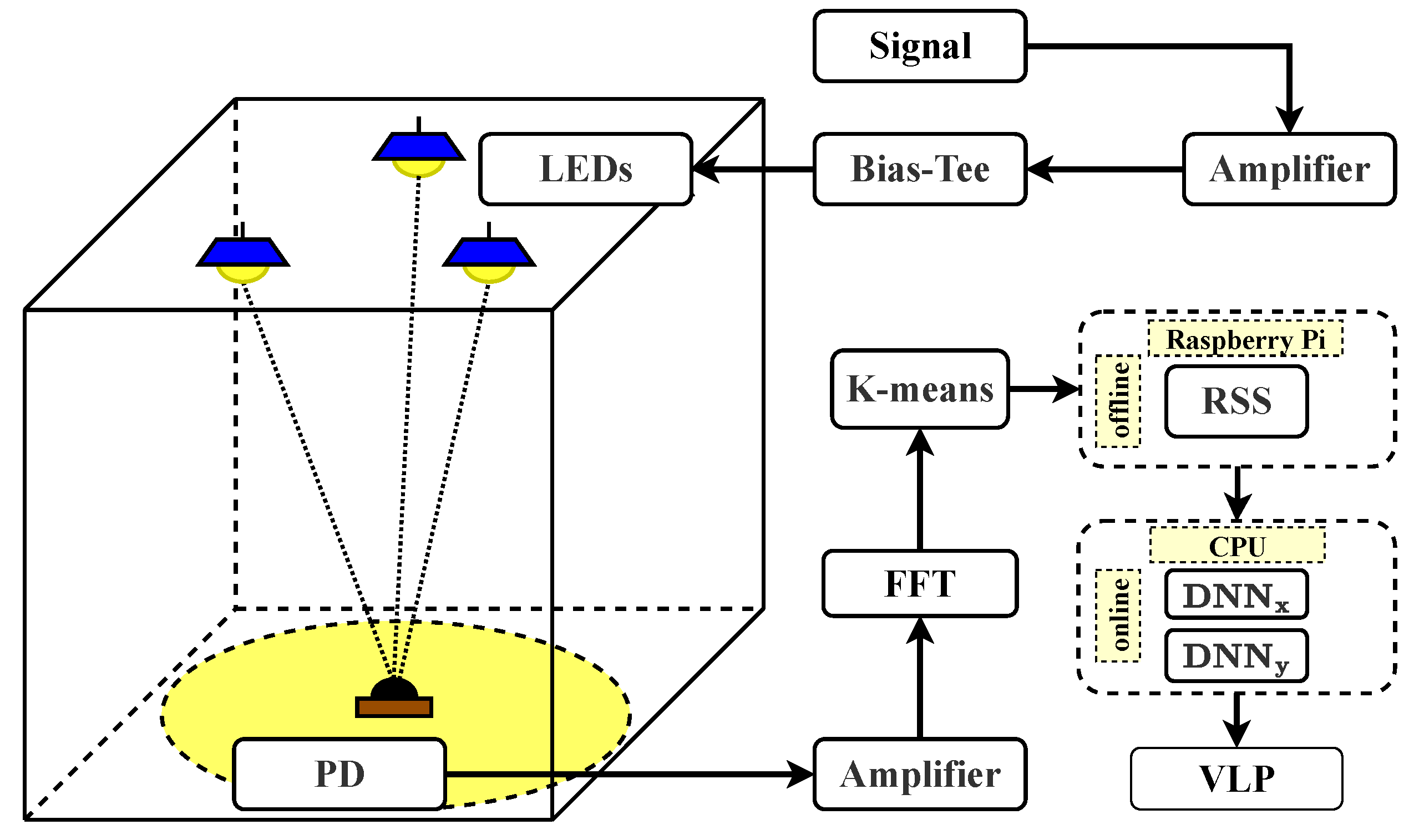
2.2. K-Means-DNN Model
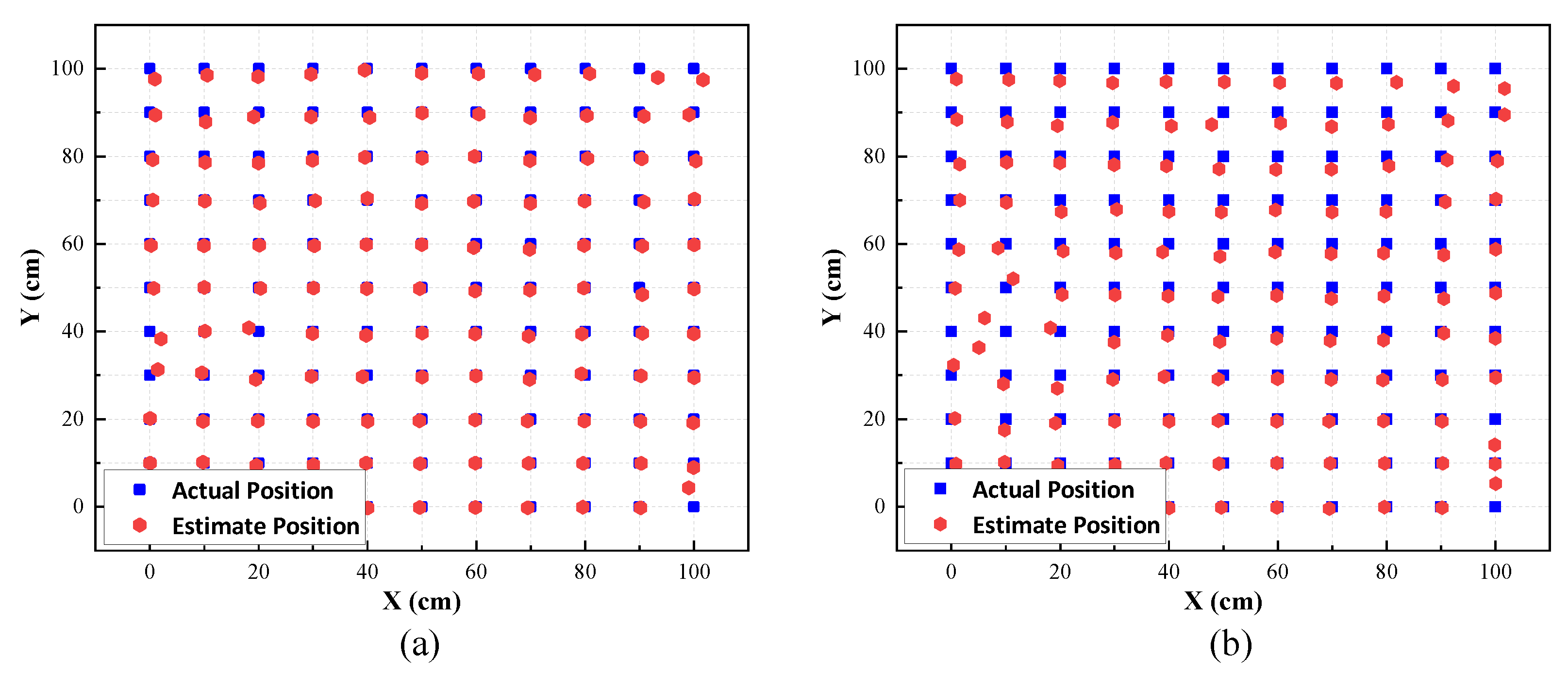
3. Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LED | Light Emitting Diode |
| DNN | Deep Neural Network |
| PD | Photo Detectors |
| VLP | Visible Light Positioning |
| IoT | Internet of Things |
| RGB | Red-Green-Blue |
| GPS | Global Positioning System |
| WLAN | Wireless Local Area Networks |
| UWB | Ultra-Wide Band |
| TOA | Time of Arrival |
| AOA | Angle of Arrival |
| TDOA | Time Difference of Arrival |
| LSTM-FCN | Long Short-Term Memory Fully Connected Network |
| ARWKNN | Adaptive Residual Weighted K-nearest Neighbors |
| GRNN | Generalized Regression Neural Network |
| BR-DNN | Deep Neural Network with Bayesian Regularization |
| FFT | Fast Fourier Transform |
| LOS | Line-of-Sight |
| CDF | Cumulative Distribution Function |
References
- Yang, C.; Shao, H.R. WiFi-based indoor positioning. IEEE Commun. Mag. 2015, 53, 150–157. [Google Scholar] [CrossRef]
- Dunlop, J.; Amanquah, N. High capacity hotspots based on bluetooth technology. IEE Proc.-Commun. 2005, 152, 521–527. [Google Scholar] [CrossRef]
- Habaebi, M.H.; Khamis, R.O.; Zyoud, A.; Islam, M.R. RSS based localization techniques for ZigBee wireless sensor network. In Proceedings of the 2014 International Conference on Computer and Communication Engineering, Kuala Lumpur, Malaysia, 23–25 September 2014; pp. 72–75. [Google Scholar]
- Wu, C.; Zhu, M.; Zhang, Y. The design and implementation of an infrared indoor positioning and lighting system. In Proceedings of the 2017 IEEE 2nd Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 25–26 March 2017; IEEE: New York, NY, USA, 2017; pp. 2134–2138. [Google Scholar]
- Huang, C.H.; Lee, L.H.; Ho, C.C.; Wu, L.L.; Lai, Z.H. Real-time RFID indoor positioning system based on Kalman-filter drift removal and Heron-bilateration location estimation. IEEE Trans. Instrum. Meas. 2014, 64, 728–739. [Google Scholar] [CrossRef]
- Alhadhrami, S.; Al-Salman, A.; Al-Khalifa, H.; Alarifi, A.; Alnafessah, A.; Alsaleh, M.; Al-Ammar, M. Ultra wideband positioning: An analytical study of emerging technologies. In Proceedings of the Eighth International Conference on Sensor Technologies and Applications, SENSORCOMM, Lisbon, Purtagal, 16–20 November 2014; pp. 1–9. [Google Scholar]
- Lee, C.; Chang, Y.; Park, G.; Ryu, J.; Jeong, S.G.; Park, S.; Park, J.W.; Lee, H.C.; Hong, K.S.; Lee, M.H. Indoor positioning system based on incident angles of infrared emitters. In Proceedings of the 30th Annual Conference of IEEE Industrial Electronics Society, IECON 2004, Busan, Republic of Korea, 2–6 November 2004; IEEE: New York, NY, USA, 2004; Volume 3, pp. 2218–2222. [Google Scholar]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Maheepala, M.; Kouzani, A.Z.; Joordens, M.A. Light-based indoor positioning systems: A review. IEEE Sens. J. 2020, 20, 3971–3995. [Google Scholar] [CrossRef]
- Huang, T.; Lin, B.; Ghassemlooy, Z.; Jiang, N.; Lai, Q. Three-Dimensional NLOS VLP Based on a Luminance Distribution Model for Image Sensor. IEEE Internet Things J. 2022, 10, 6902–6914. [Google Scholar] [CrossRef]
- Lin, B.; Tang, X.; Ghassemlooy, Z.; Lin, C.; Li, Y. Experimental demonstration of an indoor VLC positioning system based on OFDMA. IEEE Photonics J. 2017, 9, 1–9. [Google Scholar] [CrossRef]
- Chen, F.; Huang, N.; Gong, C. RSS-based visible light positioning with unknown receiver tilting angle: Robust design and experimental demonstration. Opt. Express 2022, 30, 39775–39793. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.Q.; Sekercioglu, Y.A.; Neild, A.; Armstrong, J. Position accuracy of time-of-arrival based ranging using visible light with application in indoor localization systems. J. Lightwave Technol. 2013, 31, 3302–3308. [Google Scholar] [CrossRef]
- Steendam, H. A 3-D positioning algorithm for AOA-based VLP with an aperture-based receiver. IEEE J. Sel. Areas Commun. 2017, 36, 23–33. [Google Scholar] [CrossRef]
- Do, T.H.; Yoo, M. TDOA-based indoor positioning using visible light. Photonic Netw. Commun. 2014, 27, 80–88. [Google Scholar] [CrossRef]
- Almadani, Y.; Ijaz, M.; Joseph, W.; Bastiaens, S.; Rajbhandari, S.; Adebisi, B.; Plets, D. A novel 3D visible light positioning method using received signal strength for industrial applications. Electronics 2019, 8, 1311–1317. [Google Scholar] [CrossRef]
- Chen, H.; Han, W.; Wang, J.; Lu, H.; Chen, D.; Jin, J.; Feng, L. High accuracy indoor visible light positioning using a long short term memory-fully connected network based algorithm. Opt. Express 2021, 29, 41109–41120. [Google Scholar] [CrossRef]
- Xu, S.; Chen, C.C.; Wu, Y.; Wang, X.; Wei, F. Adaptive residual weighted K-nearest neighbor fingerprint positioning algorithm based on visible light communication. Sensors 2020, 20, 4432. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Wang, J. GROF: Indoor localization using a multiple-bandwidth general regression neural network and outlier filter. Sensors 2018, 18, 3723. [Google Scholar] [CrossRef] [PubMed]
- Zhang, H.; Cui, J.; Feng, L.; Yang, A.; Lv, H.; Lin, B.; Huang, H. High-precision indoor visible light positioning using deep neural network based on the Bayesian regularization with sparse training point. IEEE Photonics J. 2019, 11, 1–10. [Google Scholar] [CrossRef]
- Guo, X.; Hu, F.; Elikplim, N.R.; Li, L. Indoor localization using visible light via two-layer fusion network. IEEE Access 2019, 7, 16421–16430. [Google Scholar] [CrossRef]
- Chen, Y.; Guan, W.; Li, J.; Song, H. Indoor real-time 3-D visible light positioning system using fingerprinting and extreme learning machine. IEEE Access 2019, 8, 13875–13886. [Google Scholar] [CrossRef]
- Komine, T.; Nakagawa, M. Fundamental analysis for visible-light communication system using LED lights. IEEE Trans. Consum. Electron. 2004, 50, 100–107. [Google Scholar] [CrossRef]
- Bastiaens, S. Towards Centimetre-Order Indoor Localisation with RSS-Based Visible Light Positioning. Ph.D. Thesis, Ghent University, Ghent, Belgium, 2022. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameter | Value |
|---|---|---|
| Adjacent LED distance | 0.85 m | |
| The coordinates of LEDs | (0.5, 0.5) (0.5, 1.25) (1.5, 1.0) | |
| The emission power of LEDs | 30 W | |
| Illuminance | 300∼900 Lx | |
| Area of photo diode | 1 | |
| m | Order of Lambertian emission | 0.646 |
| The field of view of PDs | 70° |
| References | Methodology | Complexity | Positioning Accuracy |
|---|---|---|---|
| This Work | K-means-DNN | Medium | 0.78 cm |
| [12] | Luminance Distribution Model | Medium | 7 cm |
| [13] | Cramer-Rao Bound | Medium | 7 cm |
| [14] | Maximum Likelihood | Medium | 10 cm |
| [15] | Pilot Signals | Low | 3.9 cm |
| [16] | Cayley–Menger | Medium | 10.5 cm |
| [17] | LSTM-FCN | Low | 0.92 cm |
| [18] | ARWKNN | Medium | 3.8 cm |
| [19] | GRNN | Low | 0.96 cm |
| [20] | BR-DNN | Medium | 4.5 cm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, J.; Wang, S.; Yang, L.; Lu, H.; Wang, J.; Chen, D.; Feng, L.; Chen, H.; Zhang, H. K-Means-Based DNN Algorithm for a High Accuracy VLP System. Photonics 2024, 11, 209. https://doi.org/10.3390/photonics11030209
Jin J, Wang S, Yang L, Lu H, Wang J, Chen D, Feng L, Chen H, Zhang H. K-Means-Based DNN Algorithm for a High Accuracy VLP System. Photonics. 2024; 11(3):209. https://doi.org/10.3390/photonics11030209
Chicago/Turabian StyleJin, Jianli, Shouwei Wang, Lu Yang, Huimin Lu, Jianping Wang, Danyang Chen, Lifang Feng, Hongyao Chen, and Hongyu Zhang. 2024. "K-Means-Based DNN Algorithm for a High Accuracy VLP System" Photonics 11, no. 3: 209. https://doi.org/10.3390/photonics11030209