Geometric Parameters Calibration of Focused Light Field Camera Based on Edge Spread Information Fitting


Abstract
:1. Introduction
2. Imaging and Calibration Principles
2.1. Optical Model of Focused Light Field Camera
2.2. Rendering with the Focused Light Field Camera
2.3. Calibration Principle of Focused Light Field Camera
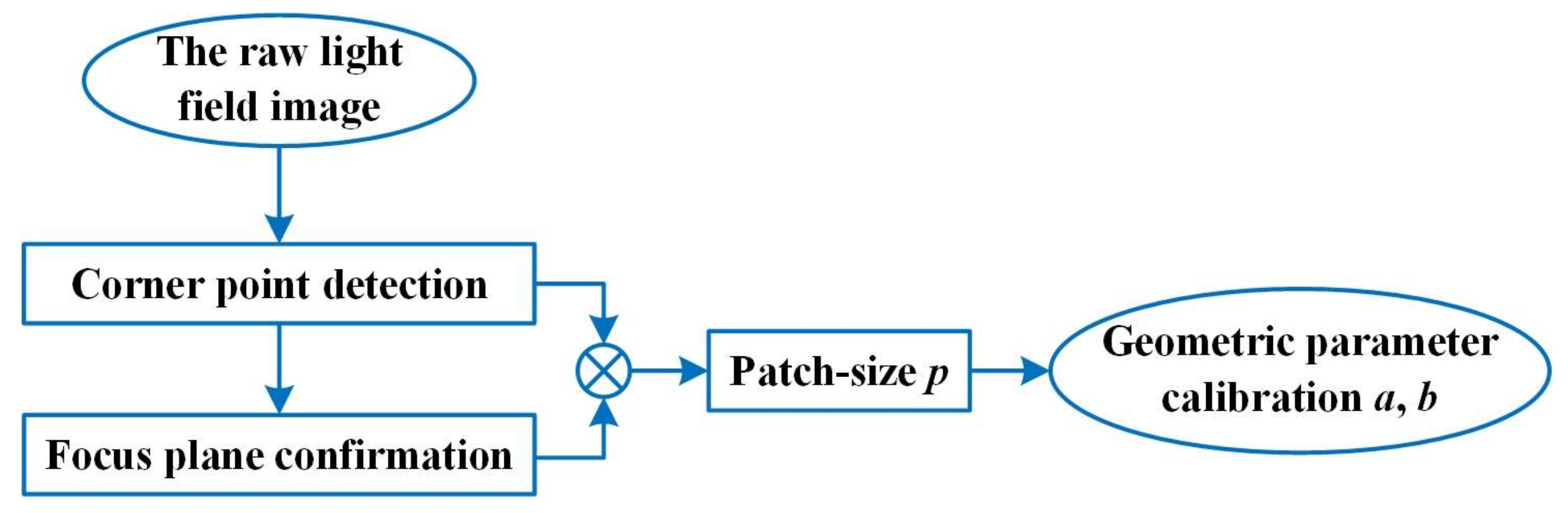
3. Calibration Method
3.1. Corner Detection Algorithm Based on ESIF
| Algorithm 1: Automatic Corner Detection Method | |
| Input: | {Mi|∈[1, n]} Raw micro-image; n: the number of the micro-image; |
| Step 1 | Adjust the two-dimensional mobile platform, extract the ROI Oi from the raw corner image. |
| Step 2 | for each i∈[I, n] do |
| Raw micro-image; processing by median filter and Hough line detection algorithms; if the number of lines equal to 4 then | |
| Obtain edge line on each micro-image; | |
| else | |
| Break the loop; | |
| Step 3 | Obtain edge block {Ai, Bi, Ci, Di}; Edge gray curve fitting and derivative; |
| Step 4 | Calculate the edge points {ai, bi, ci, di} from the edge block; Obtain precise corner coordinate {ui}; |
| Return precise corner coordinate; | |
| Output: | Precise corner coordinate in the raw corner image. |
3.2. Focus Plane Confirmation
4. Experimental Analysis
4.1. Simulation Experiments
4.2. Physical Experiments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, Z.; Zhao, Y.; Liu, S.; Liu, Y.; Wang, W.; Tang, L. Calibration of line-structured light vision sensors based on simultaneous polarization imaging. Meas. Sci. Technol. 2022, 33, 115202. [Google Scholar] [CrossRef]
- Schambach, M.; León, F.P. Microlens array grid estimation, light field decoding, and calibration. IEEE Trans. Comput. Imaging 2020, 6, 591–603. [Google Scholar] [CrossRef]
- Hu, Y.; Yao, M.; Huang, Z.; Peng, J.; Zhang, Z.; Zhong, J. Full-Resolution Light-Field Camera via Fourier Dual Photography. Photonics 2022, 9, 559. [Google Scholar] [CrossRef]
- Lam, E.Y. Computational photography with plenoptic camera and light field capture: Tutorial. J. Opt. Soc. Am. A 2015, 32, 2021–2032. [Google Scholar] [CrossRef]
- Bok, Y.; Jeon, H.-G.; Kweon, I.S. Geometric Calibration of Micro-Lens-Based Light Field Cameras Using Line Features. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 287–300. [Google Scholar] [CrossRef]
- Labussière, M.; Teulière, C.; Bernardin, F.; Ait-Aider, O. Leveraging Blur Information for Plenoptic Camera Calibration. Int. J. Comput. Vis. 2022, 130, 1655–1677. [Google Scholar] [CrossRef]
- Liu, Y.; Mo, F.; Aleksandrov, M.; Zlatanova, S.; Tao, P. Accurate calibration of standard plenoptic cameras using corner features from raw images. Opt. Express 2021, 29, 158–169. [Google Scholar] [CrossRef]
- Wang, Y.; Qiu, J.; Liu, C.; He, D.; Kang, X.; Li, J.; Shi, L. Virtual Image Points Based Geometrical Parameters’ Calibration for Focused Light Field Camera. IEEE Access 2018, 6, 71317–71326. [Google Scholar] [CrossRef]
- Jin, X.; Sun, X.; Li, C. Geometry parameter calibration for focused plenoptic cameras. Opt. Express 2020, 28, 3428–3441. [Google Scholar] [CrossRef]
- Cai, Z.; Liu, X.; Pedrini, G.; Osten, W.; Peng, X. Light-field depth estimation considering plenoptic imaging distortion. Opt. Express 2020, 28, 4156–4168. [Google Scholar] [CrossRef]
- Mishiba, K. Fast Depth Estimation for Light Field Cameras. IEEE Trans. Image Process. 2020, 29, 4232–4242. [Google Scholar] [CrossRef]
- Cai, L.; Luo, P.; Zhou, G.; Chen, Z. Maneuvering target recognition method based on multi-perspective light field reconstruction. Int. J. Distrib. Sens. Netw. 2019, 15, 1–12. [Google Scholar] [CrossRef]
- Guan, Y.; Sang, X.; Xing, S.; Chen, Y.; Li, Y.; Chen, D.; Yu, X.; Yan, B. Parallel multi-view polygon rasterization for 3D light field display. Opt. Express 2020, 28, 34406–34421. [Google Scholar] [CrossRef]
- Zhu, S.; Lai, A.; Eaton, K.; Jin, P.; Gao, L. On the fundamental comparison between unfocused and focused light field cameras. Appl. Opt. 2018, 57, A1–A11. [Google Scholar] [CrossRef]
- Cai, Z.; Liu, X.; Pedrini, G.; Osten, W.; Peng, X. Unfocused plenoptic metric modeling and calibration. Opt. Express 2019, 27, 20177–20198. [Google Scholar] [CrossRef]
- Ueno, R.; Suzuki, K.; Kobayashi, M.; Kwon, H.; Honda, H.; Funaki, H. Compound-Eye Camera Module as Small as 8.5 × 8.5 × 6.0 mm for 26 k-Resolution Depth Map and 2-Mpix 2D Imaging. IEEE Photon. J. 2013, 5, 6801212. [Google Scholar] [CrossRef]
- Georgiev, T.; Lumsdaine, A. Focused plenoptic camera and rendering. J. Electron. Imaging 2010, 19, 021106. [Google Scholar]
- Chlubna, T.; Milet, T.; Zemčík, P. Real-time per-pixel focusing method for light field rendering. Comput. Vis. Media 2021, 7, 319–333. [Google Scholar] [CrossRef]
- Tian, Y.; Liu, B.; Su, X.; Wang, L.; Li, K. Underwater Imaging Based on LF and Polarization. IEEE Photon. J. 2018, 11, 1–9. [Google Scholar] [CrossRef]
- Sipiran, I.; Bustos, B. Harris 3D: A robust extension of the Harris operator for interest point detection on 3D meshes. Vis. Comput. 2011, 27, 963–976. [Google Scholar] [CrossRef]
- Mu, Z.; Li, Z. A Novel Shi-Tomasi Corner Detection Algorithm Based on Progressive Probabilistic Hough Transform. In Proceedings of the Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 2918–2922. [Google Scholar] [CrossRef]
- Chen, Y.; Zu, S.; Wang, Y.; Chen, X. Deblending of simultaneous source data using a structure-oriented space-varying median filter. Geophys. J. Int. 2020, 222, 1805–1823. [Google Scholar] [CrossRef]
- Feng, Z.; He, W.; Fang, J.; Gu, G.; Chen, Q.; Zhang, P.; Chen, Y.; Zhou, B.; Zhou, M. Fast Depth Imaging Denoising With the Temporal Correlation of Photons. IEEE Photon. J. 2017, 9, 1–10. [Google Scholar] [CrossRef]
- Boudraa, O.; Hidouci, W.K.; Michelucci, D. Using skeleton and Hough transform variant to correct skew in historical documents. Math. Comput. Simul. 2020, 167, 389–403. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object Distance (mm) | pg (Pixel) | pc (Pixel) | Absolute Error (mm) | Error Ratio |
|---|---|---|---|---|
| 230.91 | 23 | 23.10 | 0.10 | 0.4348% |
| 267.77 | 21 | 21.03 | 0.03 | 0.1429% |
| 300 | 20 | 19.98 | 0.02 | 0.1000% |
| Parameters | Ground Truth (mm) | Calibration (mm) | Absolute Error (mm) | Error Ratio |
|---|---|---|---|---|
| a | ag = 15.0000 | ac = 15.0125 | 0.0125 | 0.083% |
| b | bg = 3.0000 | bc = 2.9995 | 0.0005 | 0.017% |
| Parameters | Ground Truth (mm) | Wang’s Results (mm) | Wang’s Error Ratio | Ours Method (mm) | Ours Error Ratio |
|---|---|---|---|---|---|
| a | −0.6649 | −0.7313 | 9.99% | −0.6223 | 6.41% |
| b | 0.1382 | 0.1383 | 0.07% | 0.1363 | 1.37% |
| Average error ratio | 5.03% | 3.89% | |||
| Parameters | Designed Values | Calibration Results |
|---|---|---|
| a | 15.00 mm | 18.53 mm |
| b | 3.00 mm | 2.89 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, W.; Wang, H.; Fan, J.; Xie, B.; Wang, X. Geometric Parameters Calibration of Focused Light Field Camera Based on Edge Spread Information Fitting. Photonics 2023, 10, 187. https://doi.org/10.3390/photonics10020187
Feng W, Wang H, Fan J, Xie B, Wang X. Geometric Parameters Calibration of Focused Light Field Camera Based on Edge Spread Information Fitting. Photonics. 2023; 10(2):187. https://doi.org/10.3390/photonics10020187
Chicago/Turabian StyleFeng, Wei, Henghui Wang, Jiahao Fan, Boya Xie, and Xuanze Wang. 2023. "Geometric Parameters Calibration of Focused Light Field Camera Based on Edge Spread Information Fitting" Photonics 10, no. 2: 187. https://doi.org/10.3390/photonics10020187