
Exploring the Potential of Mixed Fourier Series in Signal Processing Applications Using One-Dimensional Smooth Closed-Form Functions with Compact Support: A Comprehensive Tutorial


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- We prove that the Roache approach (i.e., using simple polynomials derived from the residual error framework) is spectrally equivalent to the Lanczos approach (i.e., using quasi-Bernoulli polynomials derived from an integration-by-parts framework) for any harmonic different from zero (i.e., ), where simple polynomial coefficients are determined by a low-cost backward algorithm. Although both approaches have the same complexity when using linear operators based on integrals or derivatives, simple polynomials are easier to manipulate using these operators, and they reduce rounding errors by lowering addition and multiplication operations.
- We propose a reprojection method that allows the transformation from Fourier series coefficients to mixed Fourier series coefficients. We introduce the term “mixed Fourier series” to designate the summation of series derived from a smooth periodic residual error, wherein one of the series is the Fourier series. This method allows for recovering convergence using standard Fourier coefficients obtained from any smooth function. The proposed method has the advantage of avoiding the temporal information of g:. Therefore, it has the potential to be particularly useful for native spectral applications (e.g., solving differential equations with spectral methods).
- By employing the Maliev–Lanczos approach and leveraging the residual error framework, we introduce and evaluate a novel sub-harmonic mixed Fourier series. This new series demonstrates enhanced performance and versatility in approximating wide-band or pass-band functions compared to the quasi-Bernoulli series. It is worth noting that the Maliev–Lanczos approach presents a set of continuity-based constraints that can be applied to any series complementing the Fourier series. Moreover, the conditions for achieving accelerated convergence can be readily obtained using the residual error framework.
- We discuss several examples of common smooth functions whose approximations using polynomials and trigonometric series exhibit several well-known adverse phenomena, such as the Gibbs phenomenon, Runge’s phenomenon, spectral leakage, and non-convergence by a non-analytic point or a limited region of convergence (using the Taylor series), which are successfully represented by the mixed Fourier series. The results demonstrate the potential of the Maliev–Lanczos approach in the approximation of the usual smooth functions in applied problems, even outperforming, in several scenarios, the Taylor series, orthogonal polynomials, and Chebyshev polynomials using nonuniform sampling.
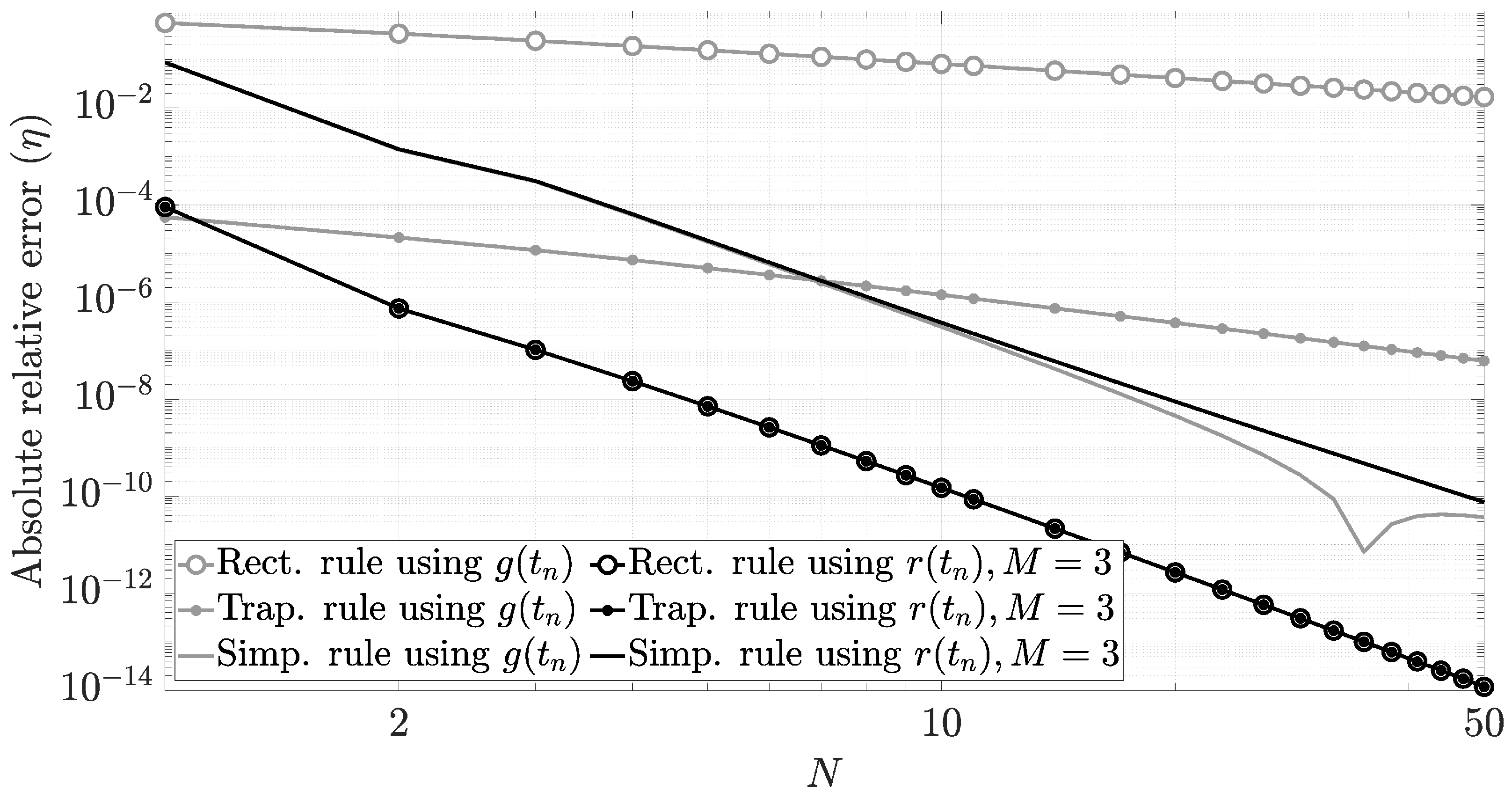
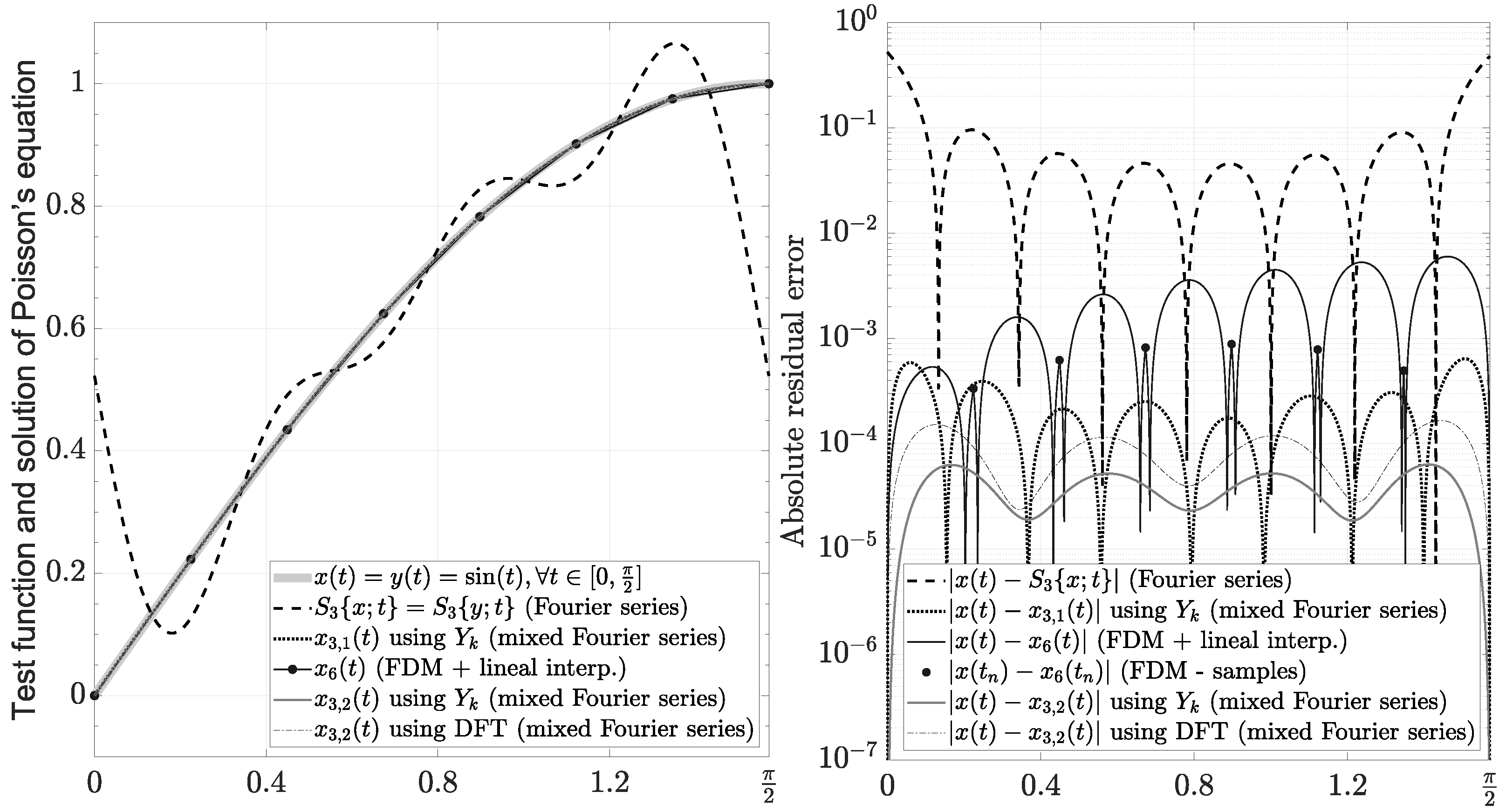
- We illustrate the application of the mixed Fourier series with linear operators. In particular, we solve a common direct problem in applied mathematics (Numerical Riemann Integration) and a common inverse problem in fluid dynamics (Poisson’s equation). In both examples, we show the benefit of employing simple polynomials, and we illustrate fast convergence without the Gibbs phenomenon.
- We evaluate the use of a mixed evaluation (i.e., a combination of closed-form derivatives and the DFT approach) to find the mixed Fourier series of functions without closed-form Fourier coefficients. In that case, we show that the DFT reflects the property for smooth functions, which allows accelerated discrete Fourier processing. Therefore, this approach has a huge potential for a wide range of practical situations.
- Finally, we show in detail the methodology used to define a new mixed Fourier series using the residual error framework. Additionally, the versatility of this new series is demonstrated through several examples.
2. Continuous-Time Theory
2.1. Fourier Series Fundamentals
2.2. Mixed Fourier Series
2.3. Polynomial Coefficients in Closed Form
2.3.1. Case
2.3.2. Case
2.3.3. Case
2.3.4. General Case: Arbitrary Such That
2.4. Fourier Coefficients in Closed Form
2.5. Enhanced Continuous-Time Processing
2.6. Relation with the Maliev–Lanczos Approach
2.7. A Simple Reprojection Method: Using Standard Closed-Form Fourier Coefficients to Define a Mixed Fourier Series
3. Continuous-Time Examples and Applications
3.1. A Different Perspective for Convergent Series of Functions
3.2. Canonical Examples of Approximation Using Closed-Form Smooth Functions
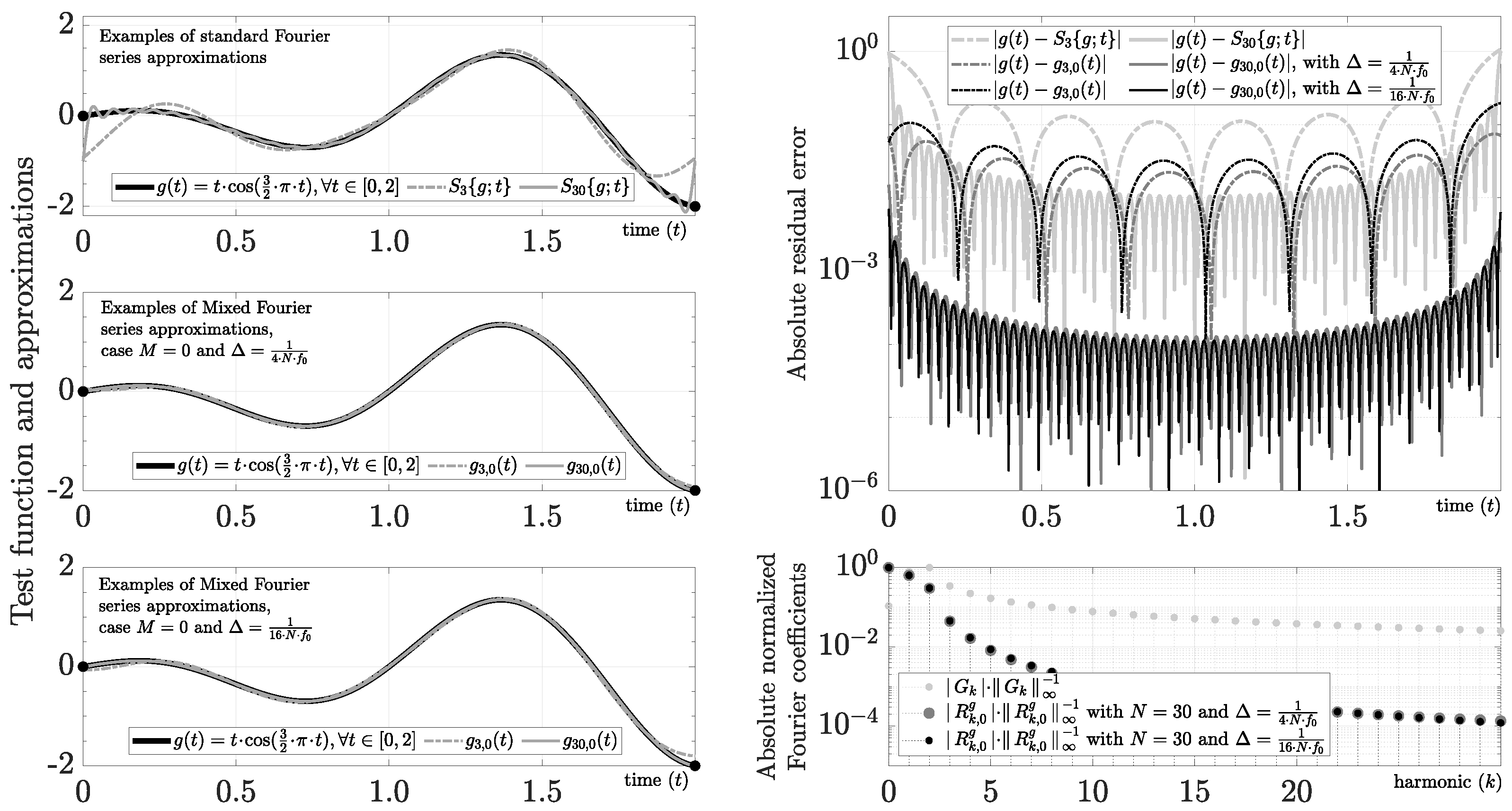
3.2.1. Generic Sawtooth Function
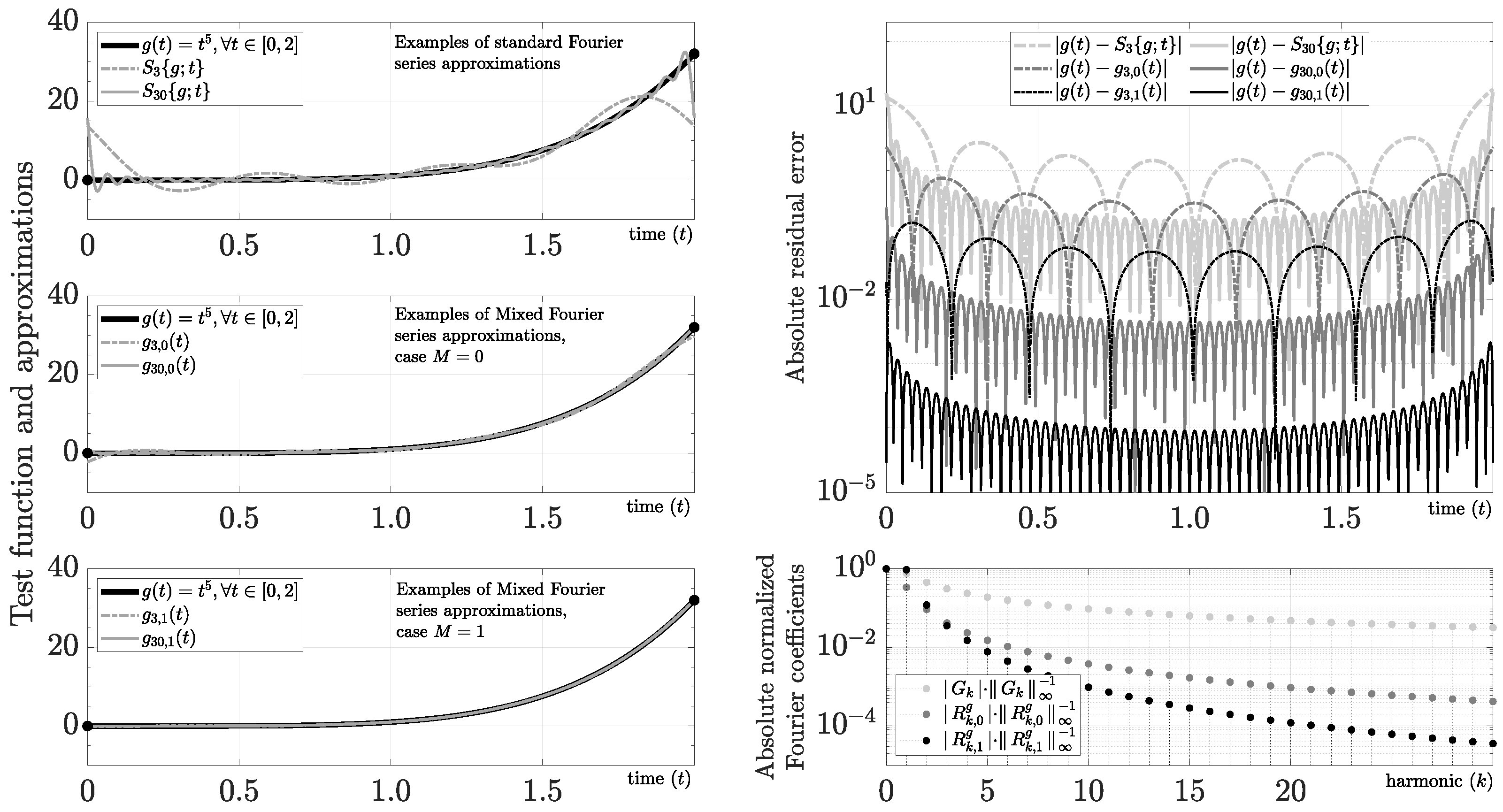
3.2.2. Power Function
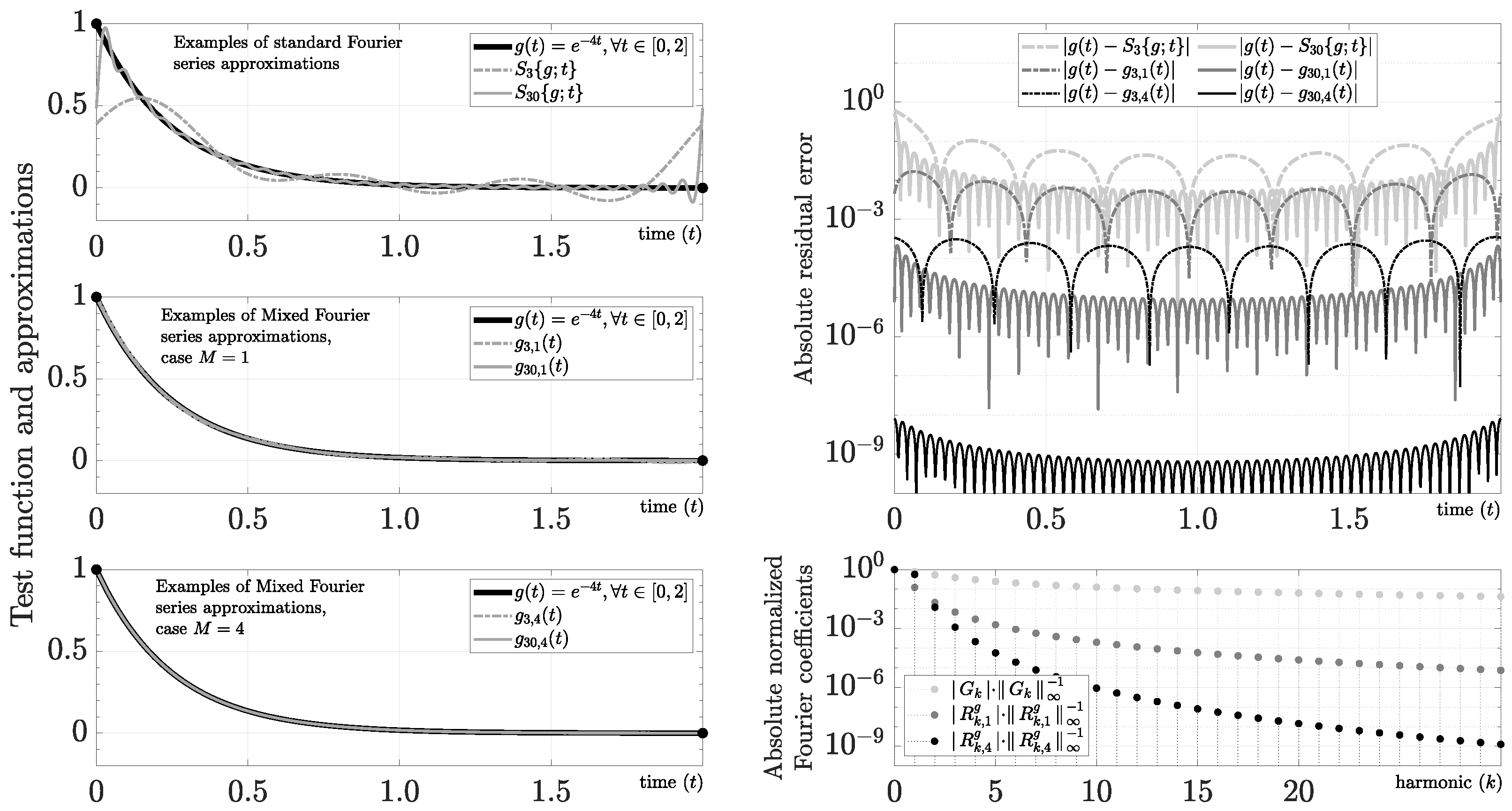
3.2.3. Exponential Function
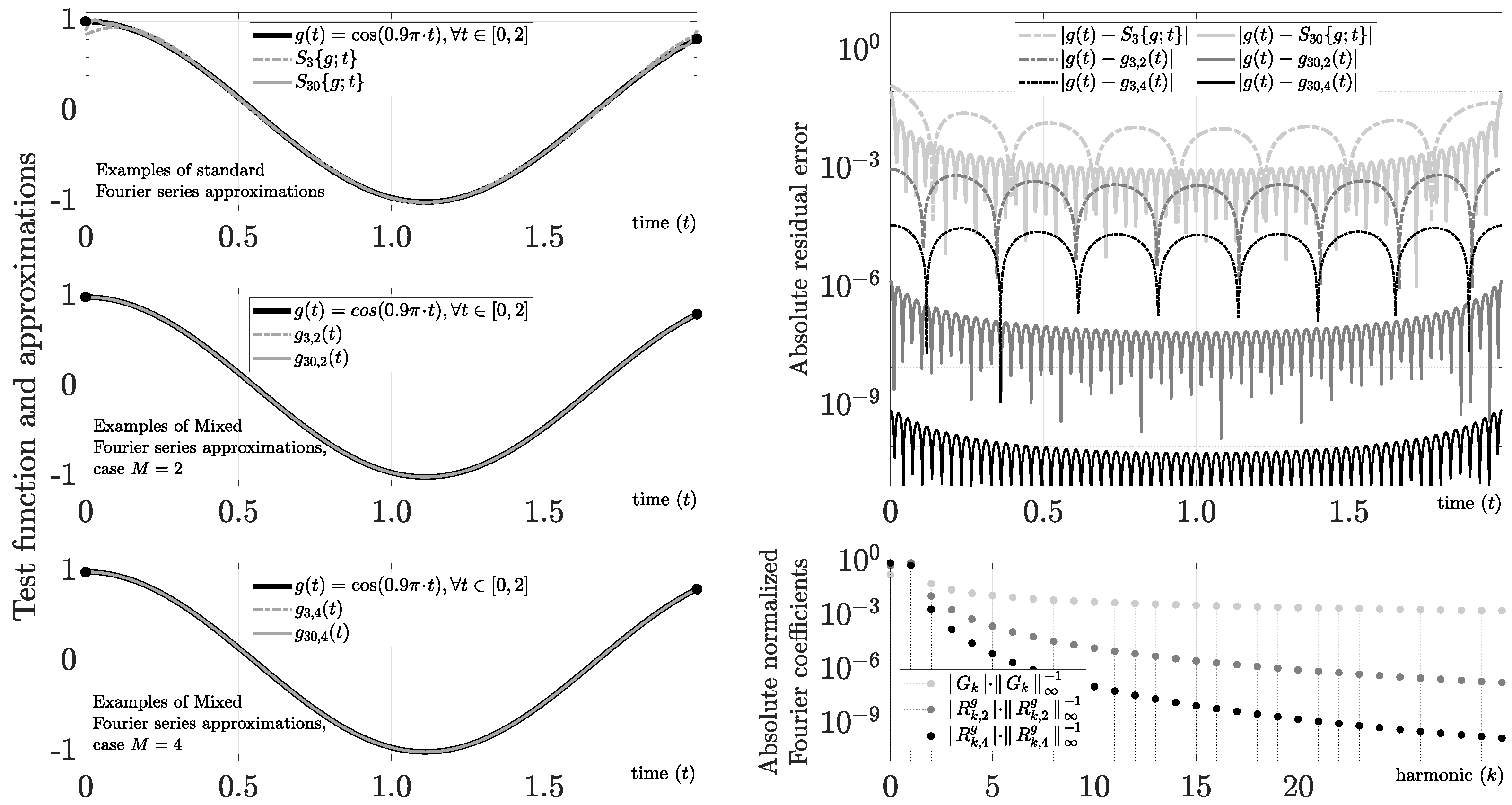
3.2.4. Base-Band Cosine Function
3.3. Comparison with Selected State-of-the-Art Techniques
3.4. A Canonical Direct Problem: Numerical Riemann Integration of Closed-Form Smooth Functions
3.5. A Canonical Inverse Problem: Solution of a Boundary Value Problem (BVP) Using Standard Closed-Form Fourier Coefficients
3.6. A Canonical Inverse Problem: Solution of a Boundary Value Problem (BVP) Using the DFT
3.7. Toward an Ideal Sampling Theorem for Truncated Continuous-Time Functions
- 1.
- If , then such that , where can be as small as desired.
- 2.
- If , then such that , where can be as small as desired. The bandwidth of with this approach is .
- 3.
- Conclusively, if both previous limits converge to zero, then , where can be as small as desired.
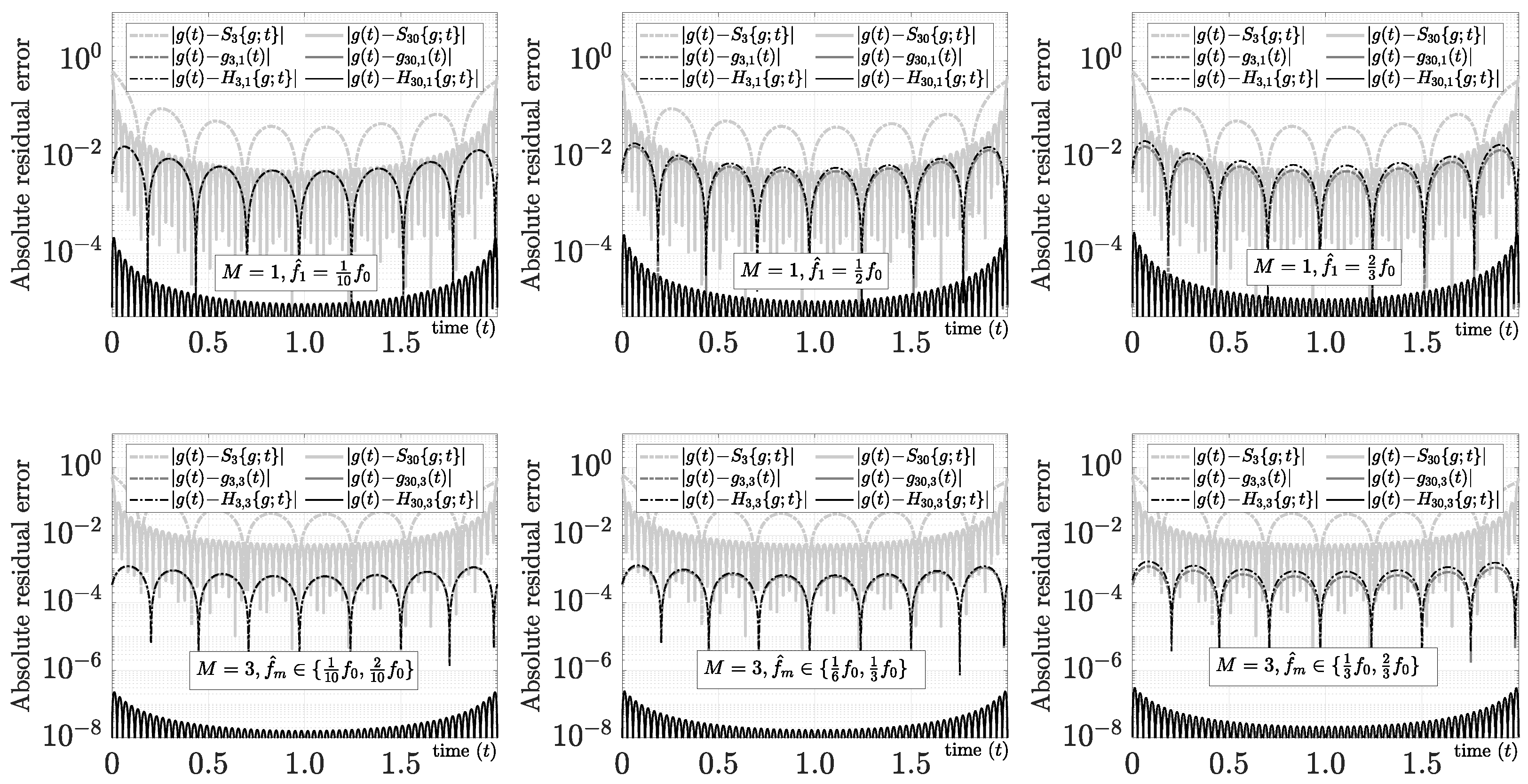
3.8. Canonical Example of a Non-Polynomial Mixed Fourier Series: The Sub-Harmonic Case
4. Open Challenges and Future Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zygmund, A. Trigonometric Series, 3rd ed.; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar] [CrossRef]
- Allen, R.; Mills, D. Signal Analysis: Time, Frequency, Scale, and Structure; Wiley-IEEE Press: Hoboken, NJ, USA, 2004. [Google Scholar] [CrossRef]
- Knapp, A.W. Basic Real Analysis; Birkhäuser: Basel, Switzerland, 2005. [Google Scholar] [CrossRef]
- Cho, C.H.; Chen, C.Y.; Chen, K.C.; Huang, T.W.; Hsu, M.C.; Cao, N.P.; Zeng, B.; Tan, S.G.; Chang, C.R. Quantum Computation: Algorithms and Applications. Chin. J. Phys. 2021, 72, 248–269. [Google Scholar] [CrossRef]
- Bao, S.; Cao, J.; Wang, S. Vibration Analysis of Nanorods by the Rayleigh-Ritz Method and Truncated Fourier Series. Results Phys. 2019, 12, 327–334. [Google Scholar] [CrossRef]
- Paez-Rueda, C.; Bustamante-Miller, R. Novel Computational Approach to Solve Convolutional Integral Equations: Method of Sampling for One Dimension. Ing. Univ. 2019, 23, 1–32. [Google Scholar] [CrossRef]
- Sokhal, S.; Ram Verma, S. A Fourier Wavelet Series Solution of Partial Differential Equation Through the Separation of Variables Method. Appl. Math. Comput. 2021, 388, 125480. [Google Scholar] [CrossRef]
- Gurpinar, E.; Sahu, R.; Ozpineci, B. Heat Sink Design for WBG Power Modules Based on Fourier Series and Evolutionary Multi-Objective Multi-Physics Optimization. IEEE Open J. Power Electron. 2021, 2, 559–569. [Google Scholar] [CrossRef]
- Acero, J.; Lope, I.; Carretero, C.; Burdío, J.M. Analysis and Modeling of the Forces Exerted on the Cookware in Induction Heating Applications. IEEE Access 2020, 8, 131178–131187. [Google Scholar] [CrossRef]
- Momose, A. X-ray Phase Imaging Reaching Clinical Uses. Phys. Med. 2020, 79, 93–102. [Google Scholar] [CrossRef]
- Katiyar, R.; Gupta, V.; Pachori, R.B. FBSE-EWT-Based Approach for the Determination of Respiratory Rate from PPG Signals. IEEE Sens. Lett. 2019, 3, 7001604. [Google Scholar] [CrossRef]
- Tripathy, R.K.; Bhattacharyya, A.; Pachori, R.B. A Novel Approach for Detection of Myocardial Infarction from ECG Signals of Multiple Electrodes. IEEE Sens. J. 2019, 19, 4509–4517. [Google Scholar] [CrossRef]
- Lostanlen, V.; Andén, J.; Lagrange, M. Fourier at the Heart of Computer Music: From Harmonic Sounds to Texture. Comptes Rendus Phys. 2019, 20, 461–473. [Google Scholar] [CrossRef]
- Canuto, C.G.; Hussaini, M.Y.; Quarteroni, A.; Zang, T.A. Spectral Methods: Fundamentals in Single Domains; Scientific Computation; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Chawde, D.P.; Bhandakkar, T.K. Mixed Boundary Value Problems in Power-law Functionally Graded Circular Annulus. Int. J. Press. Vessel. Pip. 2021, 192, 104402. [Google Scholar] [CrossRef]
- Nie, G.; Hu, H.; Zhong, Z.; Chen, X. A Complex Fourier Series Solution for Free Vibration of Arbitrary Straight-sided Quadrilateral Laminates with Variable Angle Tows. Mech. Adv. Mater. Struct. 2022, 29, 1081–1096. [Google Scholar] [CrossRef]
- Chen, Q.; Du, J. A Fourier Series solution for the Transverse Vibration of Rotating Beams with Elastic Boundary Supports. Appl. Acoust. 2019, 155, 1–15. [Google Scholar] [CrossRef]
- Zhang, M.Y.; Hu, D.Y.; Yang, C.; Shi, W.; Liao, A.H. An Improvement of the Generalized Discrete Fourier Series Based Patch Near-field Acoustical Holography. Appl. Acoust. 2021, 173, 107711. [Google Scholar] [CrossRef]
- Cheng, D.; Kou, K.I. Multichannel Interpolation of Nonuniform Samples with Application to Image Recovery. J. Comput. Appl. Math. 2020, 367, 112502. [Google Scholar] [CrossRef]
- Cheng, D.; Kou, K.I. FFT Multichannel Interpolation and Application to Image Super-resolution. Signal Process. 2019, 162, 21–34. [Google Scholar] [CrossRef]
- Brooks, E.B.; Thomas, V.A.; Wynne, R.H.; Coulston, J.W. Fitting the Multitemporal Curve: A Fourier Series Approach to the Missing Data Problem in Remote Sensing Analysis. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3340–3353. [Google Scholar] [CrossRef]
- Jayasankar, U.; Thirumal, V.; Ponnurangam, D. A Survey on Data Compression Techniques: From the Perspective of Data Quality, Coding Schemes, Data Type and Applications. J. King Saud Univ. Comput. Inf. Sci. 2021, 33, 119–140. [Google Scholar] [CrossRef]
- Hewitt, E.; Hewitt, R.E. The Gibbs-Wilbraham Phenomenon: An Episode in Fourier Analysis. Arch. Hist. Exact Sci. 1979, 21, 129–160. [Google Scholar] [CrossRef]
- Reade, J.B. On the Order of Magnitude of Fourier Coefficients. SIAM J. Math. Anal. 1986, 17, 469–476. [Google Scholar] [CrossRef]
- Jackson, D. The Convergence of Fourier Series. Am. Math. Mon. 1934, 41, 67–84. [Google Scholar] [CrossRef]
- Harris, F. On the Use of Windows for Harmonic Analysis with the Discrete Fourier Transform. Proc. IEEE 1978, 66, 51–83. [Google Scholar] [CrossRef]
- Jerri, A.J. The Gibbs Phenomenon in Fourier Analysis, Splines and Wavelet Approximations; Mathematics and Its Applications; Springer: New York, NY, USA, 1998. [Google Scholar] [CrossRef]
- Lanczos, C. Applied Analysis; Dover Publications: Mineola, NY, USA, 2013. [Google Scholar] [CrossRef]
- Torcal-Milla, F.J. A Simple Approach to the Suppression of the Gibbs Phenomenon in Diffractive Numerical Calculations. Optik 2021, 247, 167921. [Google Scholar] [CrossRef]
- Hamming, R. Numerical Methods for Scientists and Engineers, 2nd ed.; Dover: Mineola, NY, USA, 1987. [Google Scholar]
- Jerri, A.J. Lanczos-Like σ-Factors for Reducing the Gibbs Phenomenon in General Orthogonal Expansions and Other Representations. J. Comput. Anal. Appl. 2000, 2, 111–127. [Google Scholar] [CrossRef]
- Yun, B.I.; Rim, K.S. Construction of Lanczos Type Filters for the Fourier Series Approximation. Appl. Numer. Math. 2009, 59, 280–300. [Google Scholar] [CrossRef]
- Murio, D.A. The Mollification Method and the Numerical Solution of Ill-Posed Problems; Wiley-Interscience: Hoboken, NJ, USA, 1993. [Google Scholar] [CrossRef]
- Tadmor, E.; Tanner, J. Adaptive Mollifiers for High Resolution Recovery of Piecewise Smooth Data from its Spectral Information. Found. Comput. Math. 2002, 2, 155–189. [Google Scholar] [CrossRef]
- Tadmor, E.; Tanner, J. Adaptive Filters for Piecewise Smooth Spectral Data. IMA J. Numer. Anal. 2005, 25, 635–647. [Google Scholar] [CrossRef]
- Tanner, J. Optimal Filter and Mollifier for Piecewise Smooth Spectral Data. Math. Comput. 2006, 75, 767–790. [Google Scholar] [CrossRef]
- Tadmor, E. Filters, Mollifiers and the Computation of the Gibbs Phenomenon. Acta Numer. 2007, 16, 305–379. [Google Scholar] [CrossRef]
- Piotrowska, J.; Miller, J.M.; Schnetter, E. Spectral Methods in the Presence of Discontinuities. J. Comput. Phys. 2019, 390, 527–547. [Google Scholar] [CrossRef]
- Yun, B.I.; Kim, H.C.; Rim, K.S. An Averaging Method for the Fourier Approximation to Discontinuous functions. Appl. Math. Comput. 2006, 183, 272–284. [Google Scholar] [CrossRef]
- Duman, O. Generalized Cesàro Summability of Fourier Series and its Applications. Constr. Math. Anal. 2021, 4, 135–144. [Google Scholar] [CrossRef]
- Arrowood, J.; Smith, M. Gibbs Phenomenon Suppression Using Fir Time-Varying Filter Banks. In Proceedings of the Digital Signal Processing Workshop, Utica, IL, USA, 13–16 September 1992; pp. 2.1.1–2.1.2. [Google Scholar] [CrossRef]
- Gelb, A.; Gottlieb, S. The Resolution of the Gibbs Phenomenon for Fourier Spectral Methods. In Advances in the Gibbs Phenomenon; Sampling Publishing: Potsdam, NY, USA, 2007. [Google Scholar]
- Yun, B.I. A Weighted Averaging Method for Treating Discontinuous Spectral Data. Appl. Math. Lett. 2012, 25, 1234–1239. [Google Scholar] [CrossRef]
- Ruijter, M.; Versteegh, M.; Oosterlee, C.W. On the Application of Spectral Filters in a Fourier Option Pricing Technique. J. Comput. Financ. 2015, 19, 75–106. [Google Scholar] [CrossRef]
- Walter, G.G.; Shim, H.T. Gibbs’ Phenomenon for Sampling Series and What to do About it. J. Fourier Anal. Appl. 1988, 4, 357–375. [Google Scholar] [CrossRef]
- Song, R.; Liang, Y.; Wang, X.; Qi, D. Elimination of Gibbs Phenomenon in Computational Information based on the V-system. In Proceedings of the 2007 2nd International Conference on Pervasive Computing and Applications, Birmingham, UK, 26–27 July 2007; pp. 337–341. [Google Scholar] [CrossRef]
- Greene, N. Inverse Wavelet Reconstruction for Resolving the Gibbs Phenomenon. Int. J. Circuits Syst. Signal Process. 2008, 2, 73–77. [Google Scholar]
- Morita, T.; Sato, K.i. Mollification of the Gibbs Phenomena Using Orthogonal Wavelets. In Proceedings of the 2011 International Conference on Multimedia Technology, Hangzhou, China, 26–28 July 2011; pp. 6441–6444. [Google Scholar] [CrossRef]
- Ding, Y.; Selesnick, I.W. Artifact-Free Wavelet Denoising: Non-convex Sparse Regularization, Convex Optimization. IEEE Signal Process. Lett. 2015, 22, 1364–1368. [Google Scholar] [CrossRef]
- Lombardini, R.; Acevedo, R.; Kuczala, A.; Keys, K.P.; Goodrich, C.P.; Johnson, B.R. Higher-Order Wavelet Reconstruction/Differentiation Filters and Gibbs Phenomena. J. Comput. Phys. 2016, 305, 244–262. [Google Scholar] [CrossRef]
- Pan, C. Gibbs Phenomenon Removal and Digital Filtering Directly Through the Fast Fourier Transform. IEEE Trans. Signal Process. 2001, 49, 444–448. [Google Scholar] [CrossRef]
- Boyd, J.P. A Comparison of Numerical Algorithms for Fourier Extension of the First, Second, and Third Kinds. J. Comput. Phys. 2002, 178, 118–160. [Google Scholar] [CrossRef]
- De Ridder, F.; Pintelon, R.; Schoukens, J.; Verheyden, A. Reduction of the Gibbs Phenomenon Applied on Nonharmonic Time Base Distortions. IEEE Trans. Instrum. Meas. 2005, 54, 1118–1125. [Google Scholar] [CrossRef]
- Huybrechs, D. On the Fourier Extension of Nonperiodic Functions. SIAM J. Numer. Anal. 2010, 47, 4326–4355. [Google Scholar] [CrossRef]
- Adcock, B.; Huybrechs, D. On the Resolution Power of Fourier Extensions for Oscillatory Functions. J. Comput. Appl. Math. 2014, 260, 312–336. [Google Scholar] [CrossRef]
- Geronimo, J.; Liechty, K. The Fourier Extension Method and Discrete Orthogonal Polynomials on an Arc of the Circle. Adv. Math. 2020, 365, 107064. [Google Scholar] [CrossRef]
- Gelb, A.; Tanner, J. Robust Reprojection Methods for the Resolution of the Gibbs phenomenon. Appl. Comput. Harmon. Anal. 2006, 20, 3–25. [Google Scholar] [CrossRef]
- Gottlieb, D.; Shu, C.W.; Solomonoff, A.; Vandeven, H. On the Gibbs Phenomenon I: Recovering Exponential Accuracy from the Fourier Partial Sum of a Nonperiodic Analytic Function. J. Comput. Appl. Math. 1992, 43, 81–98. [Google Scholar] [CrossRef]
- Gelb, A. A Hybrid Approach to Spectral Reconstruction of Piecewise Smooth Functions. J. Sci. Comput. 2000, 15, 293–322. [Google Scholar] [CrossRef]
- Shizgal, B.D.; Jung, J.H. Towards the Resolution of the Gibbs Phenomena. J. Comput. Appl. Math. 2003, 161, 41–65. [Google Scholar] [CrossRef]
- Jung, J.H.; Shizgal, B.D. Generalization of the Inverse Polynomial Reconstruction Method in the Resolution of the Gibbs Phenomenon. J. Comput. Appl. Math. 2004, 172, 131–151. [Google Scholar] [CrossRef]
- Chen, X.; Jung, J.H.; Gelb, A. Finite Fourier Frame Approximation Using the Inverse Polynomial Reconstruction Method. J. Sci. Comput. 2018, 76, 1127–1147. [Google Scholar] [CrossRef]
- Boyd, J.P. Chebyshev and Fourier Spectral Methods, 2nd Revised ed.; Dover Publications: Mineola, NY, USA, 2001. [Google Scholar]
- Pan, J.; Li, H. A New Collocation Method using Near-minimal Chebyshev Quadrature Nodes on a Square. Appl. Numer. Math. 2020, 154, 104–128. [Google Scholar] [CrossRef]
- Driscoll, T.; Fornberg, B. A Padé-based Algorithm for Overcoming the Gibbs Phenomenon. Numer. Algorithms 2001, 26, 77–92. [Google Scholar] [CrossRef]
- Beckermann, B.; Matos, A.C.; Wielonsky, F. Reduction of the Gibbs Phenomenon for Smooth Functions with Jumps by the ε-algorithm. J. Comput. Appl. Math. 2008, 219, 329–349. [Google Scholar] [CrossRef]
- Nersessian, A.; Poghosyan, A.; Barkhudaryan, R. Convergence Acceleration for Fourier Series. J. Contemp. Math. Anal. 2006, 41, 39–51. [Google Scholar]
- Brezinski, C. Extrapolation Algorithms for Filtering Series of Functions, and Treating the Gibbs Phenomenon. Numer. Algorithms 2004, 36, 309–329. [Google Scholar] [CrossRef]
- Pasquetti, R. On Inverse Methods for the Resolution of the Gibbs Phenomenon. J. Comput. Appl. Math. 2004, 170, 303–315. [Google Scholar] [CrossRef]
- Krylov, A.N. On Approximate Calculations, Lectures Delivered in 1906; Tipolitography of Birkenfeld: St. Petersburg, Russia, 1907. (In Russian) [Google Scholar]
- Kantorovich, L.V.; Krylov, V. Approximate Methods of Higher Analysis, 3rd ed.; Interscience Publishers Inc.: New York, NY, USA, 1964. [Google Scholar] [CrossRef]
- Lanczos, C. Discourse on Fourier Series; Hafner: New York, NY, USA, 1966. [Google Scholar] [CrossRef]
- Banerjee, N.S.; Geer, J.F. Exponential Approximations Using Fourier Series Partial Sums; Technical Report; ICASE, NASA Langley Research Center: Hampton, VA, USA, 1997. [Google Scholar]
- Rim, K.S.; Yun, B.I. Gibbs Phenomenon Removal by Adding Heaviside Functions. Adv. Comput. Math. 2013, 38, 683–699. [Google Scholar] [CrossRef]
- Yun, B.I. Improving Fourier Partial Sum Approximation for Discontinuous Functions Using a Weight Function. Abstr. Appl. Anal. 2017, 2017, 1364914. [Google Scholar] [CrossRef]
- Wangüemert-Pérez, J.G.; Godoy-Rubio, R.; Ortega-Moñux, A.; Molina-Fernández, I. Removal of the Gibbs Phenomenon and its Application to Fast-Fourier-Transform-based mode Solvers. J. Opt. Soc. Am. A 2007, 24, 3772–3780. [Google Scholar] [CrossRef]
- Jones, W.B.; Hardy, G. Accelerating Convergence of Trigonometric Approximations. Math. Comput. 1970, 24, 547–560. [Google Scholar] [CrossRef]
- Lyness, J.N. Computational Techniques Based on the Lanczos Representation. Math. Comput. 1974, 28, 81–123. [Google Scholar] [CrossRef]
- Eckhoff, K.S. Accurate and Efficient Reconstruction of Discontinuous Functions from Truncated Series Expanstions. Math. Comput. 1993, 61, 745–763. [Google Scholar] [CrossRef]
- Eckhoff, K.S. Accurate Reconstructions of Functions of Finite Regularity from Truncated Fourier Series Expansions. Math. Comput. 1995, 64, 671–690. [Google Scholar] [CrossRef]
- Eckhoff, K.S. On a High Order Numerical Method for Functions with Singularities. Math. Comput. 1998, 67, 1063–1088. [Google Scholar] [CrossRef]
- Li, W. Alternative Fourier Series Expansions with Accelerated Convergence. Appl. Math. 2016, 7, 1824–1845. [Google Scholar] [CrossRef]
- Barkhudaryan, A.; Barkhudaryan, R.; Poghosyan, A. Asymptotic Behavior of Eckhoff’s Method for Fourier Series Convergence Acceleration. Anal. Theory Appl. 2007, 23, 228–242. [Google Scholar] [CrossRef]
- Poghosyan, A. Asymptotic Behavior of the Krylov-lanczos Interpolation. Anal. Appl. 2009, 7, 199–211. [Google Scholar] [CrossRef]
- Poghosyan, A. Asymptotic Behavior of the Eckhoff Approximation in Bivariate Case. Anal. Theory Appl. 2012, 28, 329–362. [Google Scholar] [CrossRef]
- Poghosyan, A. On an Autocorrection Phenomenon of the Eckhoff Interpolation. Aust. J. Math. Anal. Appl. 2012, 9, 1–31. [Google Scholar] [CrossRef]
- Nersessian, A.; Poghosyan, A. Accelerating the Convergence of Trigonometric Series. Cent. Eur. J. Math. 2006, 4, 435–448. [Google Scholar] [CrossRef]
- Poghosyan, A.V.; Poghosyan, L. On a Pointwise Convergence of Quasi-Periodic-Rational Trigonometric Interpolation. Int. J. Anal. 2014, 2014, 249513. [Google Scholar] [CrossRef]
- Poghosyan, A.; Bakaryan, T. Optimal Rational Approximations by the Modified Fourier Basis. Abstr. Appl. Anal. 2018, 2018, 1705409. [Google Scholar] [CrossRef]
- Poghosyan, A.; Poghosyan, L.; Barkhudaryan, R. On some quasi-periodic approximations. Armen. J. Math. 2020, 12, 1–27. [Google Scholar] [CrossRef]
- Poghosyan, A.; Poghosyan, L.; Barkhudaryan, R. On the Convergence of the Quasi-periodic Approximations on a Finite Interval. Armen. J. Math. 2021, 13, 1–44. [Google Scholar] [CrossRef]
- Nersessian, A.; Poghosyan, A. On a Rational Linear Approximation of Fourier Series for Smooth Functions. J. Sci. Comput. 2006, 26, 111–125. [Google Scholar] [CrossRef]
- Nersessian, A. On an Over-Convergence Phenomenon for Fourier series. Armen. J. Math. 2018, 10, 1–21, Correction in Armen. J. Math. 2019, 11, 1–2. [Google Scholar] [CrossRef]
- Nersessian, A. Fourier Tools are Much More Powerful than Commonly Thought. Lobachevskii J. Math. 2019, 40, 1122–1131. [Google Scholar] [CrossRef]
- Nersessian, A. Operator Theory and Harmonic Analysis; Springer Proceedings in Mathematics and Statistics; Chapter On Some Fast Implementations of Fourier Interpolation; Springer: Berlin/Heidelberg, Germany, 2021; pp. 463–477. [Google Scholar] [CrossRef]
- Nersessian, A. Acceleration of Convergence of Fourier Series Using the Phenomenon of Over-Convergence. Armen. J. Math. 2022, 14, 1–31. [Google Scholar] [CrossRef]
- Nersessian, A.; Poghosyan, A. The convergence acceleration of two-dimensional Fourier interpolation. Armen. J. Math. 2008, 1, 50–63. [Google Scholar]
- Baszenski, G.; Delvos, F.; Tasche, M. A United Approach to Accelerating Trigonometric Expansions. Comput. Math. Appl. 1995, 30, 33–49. [Google Scholar] [CrossRef]
- Adcock, B. Modified Fourier Expansions: Theory, Construction and Applications. Ph.D. Thesis, Trinity Hall, University of Cambridge, Cambridge, UK, 2010. [Google Scholar] [CrossRef]
- Batenkov, D.; Yomdin, Y. Algebraic Fourier Reconstruction of Piecewise Smooth Functions. Math. Comput. 2012, 81, 277–318. [Google Scholar] [CrossRef]
- Batenkov, D. Complete Algebraic Reconstruction of Piecewise-smooth Functions from Fourier Data. Math. Comput. 2015, 84, 2329–2350. [Google Scholar] [CrossRef]
- Trefethen, L.N. Spectral Methods in MATLAB; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2000. [Google Scholar]
- Shen, J.; Tang, T.; Wang, L.L. Spectral Methods: Algorithms, Analysis and Applications; Springer Series in Computational Mathematics 41; Springer Publishing Company Incorporated: New York, NY, USA, 2011. [Google Scholar]
- Roache, P.J. A Pseudo-spectral FFT Technique for Non-periodic Problems. J. Comput. Phys. 1978, 27, 204–220. [Google Scholar] [CrossRef]
- Lee, H.N. An Alternate Pseudospectral Model for Pollutant Transport, Diffusion and Deposition in the atmosphere. Atmos. Environ. 1981, 15, 1017–1024. [Google Scholar] [CrossRef]
- Biringen, S.; Kao, K.H. On the Application of Pseudospectral FFT Techniques to Non-periodic Problems. Int. J. Numer. Methods Fluids 1989, 9, 1235–1267. [Google Scholar] [CrossRef]
- Kleiner, I. Evolution of the Function Concept: A Brief Survey. Coll. Math. J. 1989, 20, 282–300. [Google Scholar] [CrossRef]
- Katznelson, Y. An Introduction to Harmonic Analysis; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar] [CrossRef]
- Grafakos, L. Classical Fourier Analysis, 3rd ed.; Graduate Texts in Mathematics 249; Springer: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Tveito, A.; Winther, R. Introduction to Partial Differential Equations: A Computational Approach; Springer: Berlin/Heidelberg, Germany, 2005; Volume 29. [Google Scholar] [CrossRef]
- Friesecke, G. Lectures on Fourier Analysis; University of Warwick: Coventry, UK, 2007. [Google Scholar]
- Jeffreys, H.; Jeffreys, B. Methods of Mathematical Physics, 3rd ed.; Cambridge Mathematical Library, Cambridge University Press: Cambridge, UK, 2000. [Google Scholar] [CrossRef]
- Unser, M. Sampling-50 Years After Shannon. Proc. IEEE 2000, 88, 569–587. [Google Scholar] [CrossRef]
- Vaidyanathan, P. Generalizations of the Sampling Theorem: Seven Decades After Nyquist. IEEE Trans. Circuits Syst. Fundam. Theory Appl. 2001, 48, 1094–1109. [Google Scholar] [CrossRef]
- Xu, K. The Chebyshev Points of the First Kind. Appl. Numer. Math. 2016, 102, 17–30. [Google Scholar] [CrossRef]
- Press, W.H.; Teukolsky, S.A.; Vetterling, W.T.; Flannery, B.P. Numerical Recipes: The Art of Scientific Computing, 3rd ed.; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar] [CrossRef]
- Sköllermo, G. A Fourier Method for the Numerical Solution of Poisson’s Equation. Math. Comput. 1975, 29, 697–711. [Google Scholar] [CrossRef]
- Leveque, R. Finite Difference Methods for Ordinary and Partial Differential Equations: Steady-State and Time-Dependent Problems; Classics in Applied Mathematics; SIAM, Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2007. [Google Scholar] [CrossRef]














Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Páez-Rueda, C.-I.; Fajardo, A.; Pérez, M.; Yamhure, G.; Perilla, G. Exploring the Potential of Mixed Fourier Series in Signal Processing Applications Using One-Dimensional Smooth Closed-Form Functions with Compact Support: A Comprehensive Tutorial. Math. Comput. Appl. 2023, 28, 93. https://doi.org/10.3390/mca28050093
Páez-Rueda C-I, Fajardo A, Pérez M, Yamhure G, Perilla G. Exploring the Potential of Mixed Fourier Series in Signal Processing Applications Using One-Dimensional Smooth Closed-Form Functions with Compact Support: A Comprehensive Tutorial. Mathematical and Computational Applications. 2023; 28(5):93. https://doi.org/10.3390/mca28050093
Chicago/Turabian StylePáez-Rueda, Carlos-Iván, Arturo Fajardo, Manuel Pérez, German Yamhure, and Gabriel Perilla. 2023. "Exploring the Potential of Mixed Fourier Series in Signal Processing Applications Using One-Dimensional Smooth Closed-Form Functions with Compact Support: A Comprehensive Tutorial" Mathematical and Computational Applications 28, no. 5: 93. https://doi.org/10.3390/mca28050093