2.1. Multilayer Perceptron Neural Networks
Multilayer perceptron (MLP) networks are the most used category of artificial neural networks [
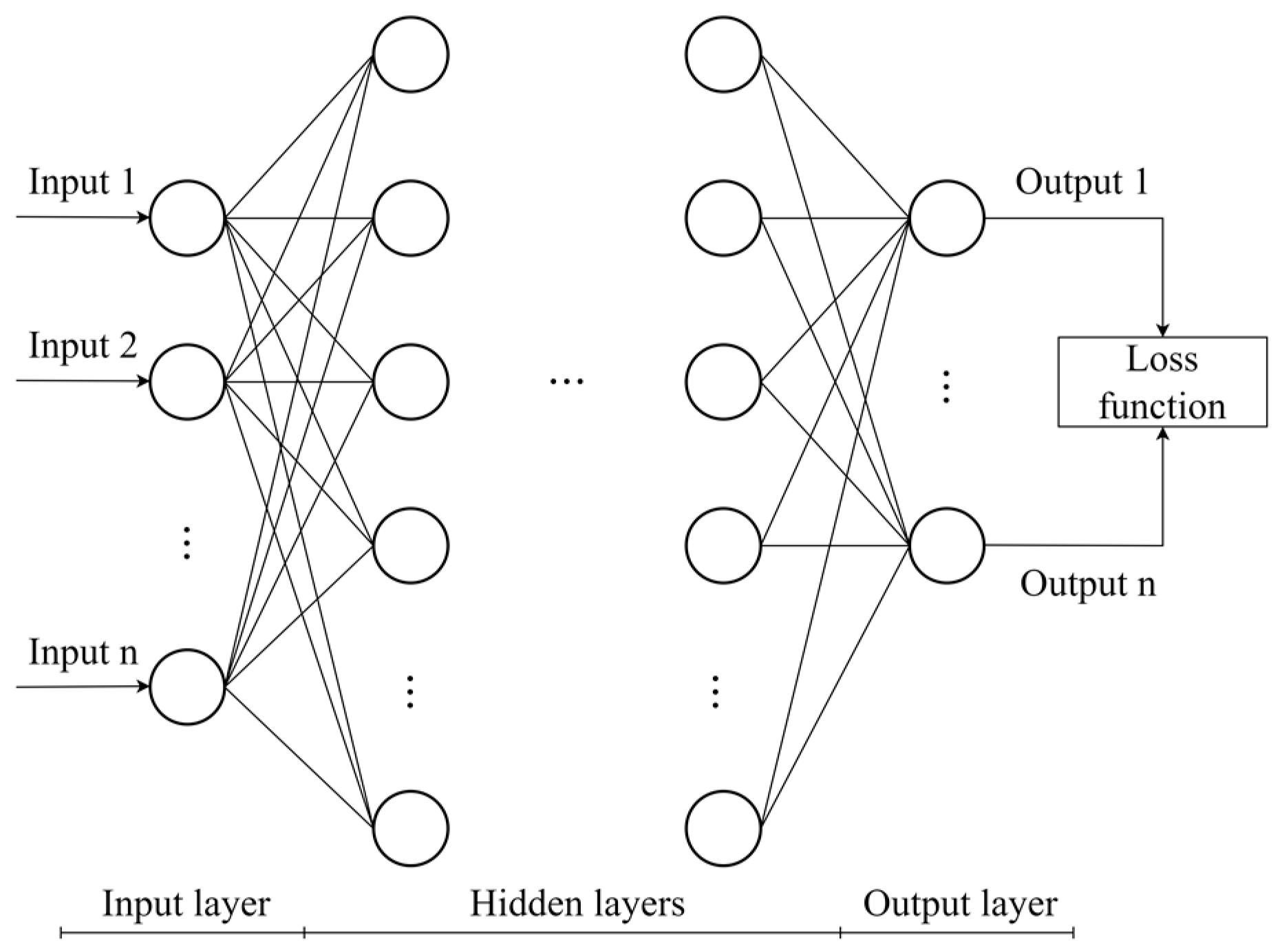
19]. These networks can be trained to fit non-linear relationships between input and output variables accurately through exposure to known examples of corresponding data points. MLP networks consist of systems of interconnected signal processing nodes, known as neurons, that are divided into three sections, namely the input layer, hidden layers, and output layer, as shown in
Figure 1. In a fully connected MLP network, each neuron in a given layer is connected to every other neuron in both the previous and subsequent layers. The number of neurons per hidden layer, as well as the number of hidden layers, are architecture hyperparameters that require tuning during the training process.
To make a prediction, MLP networks feed the output from a neuron to each neuron in the downstream layer of the network. This output signal is multiplied by a weight and summed with the other incoming weighted signals. A bias value is added to this summed signal. To calculate the output signal of a given layer
, the summed weighted incoming signal is then passed into a non-linear activation function. This process starts at the input layer and is repeated until the signal reaches the output layer. The output signal from the final layer is the predicted value of the MLP network. This process is known as forward propagation and is given in vector form as follows:
In Equation (1), is the output vector from the previous layer, , is a matrix containing all the connecting weights for the layer, is a vector containing the layer biases, and represents the activation function for the layer.
The network weights and biases constitute the trainable network parameters. These parameters are optimized to produce accurate predictions by minimizing a selected loss function. Typically, the mean squared error (MSE) between the predicted values
and the target values from the training dataset
is used as the loss function for MLP networks. The MSE loss function is given as:
The loss function is minimized using a gradient-based optimization process which requires the gradient of the loss function with respect to the trainable network parameters. With these gradients known, the trainable network parameters are updated iteratively to minimize the loss function. The use of the given target values implies that MLP neural networks rely on supervised learning, as opposed to unsupervised learning.
2.2. PINN Methodology for Thermofluid Process Modeling
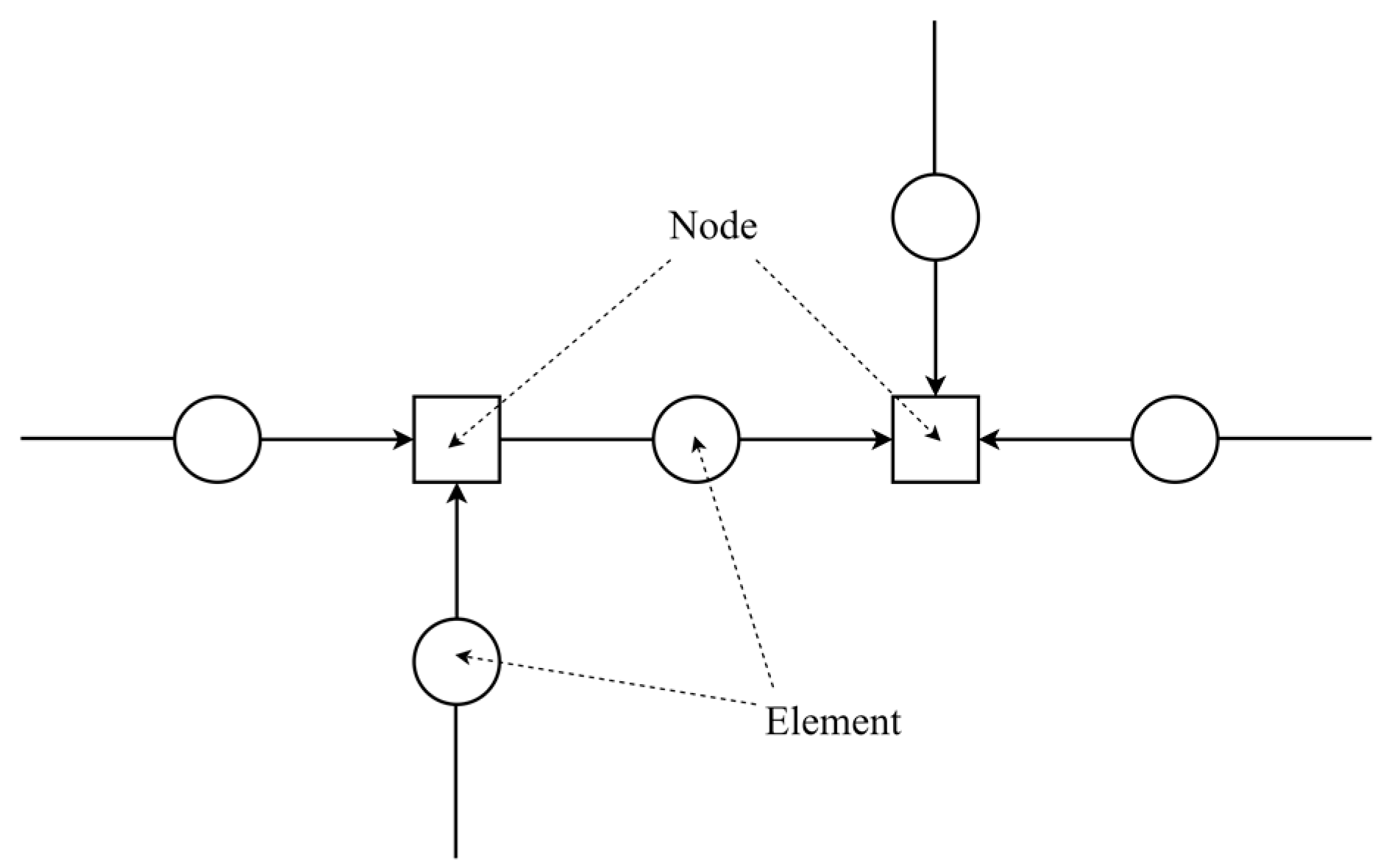
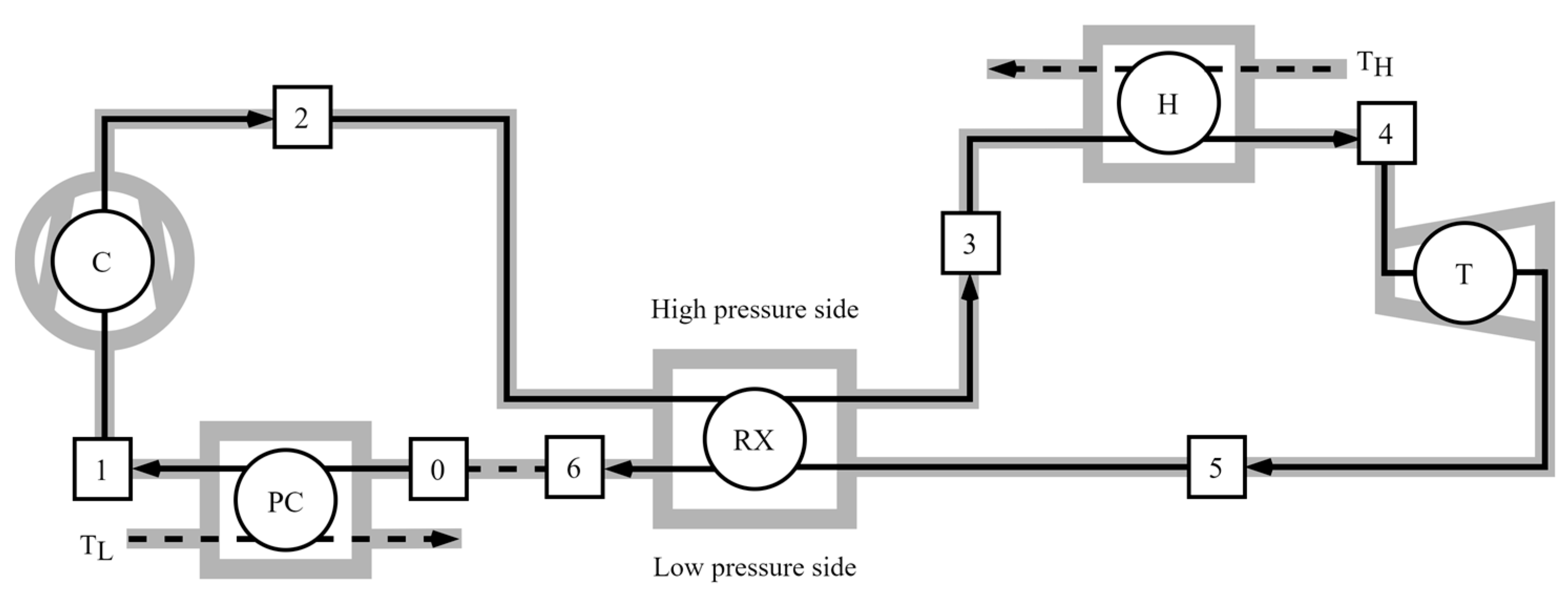
In the thermofluid network process modeling methodology, the system layout is described in terms of nodes and elements, as shown schematically in
Figure 2.
An element is a control volume that represents a physical component such as a pipe, valve, heat exchanger, boiler, or turbine. Each element has one inlet and one outlet and the fluid properties within the element are assumed to be represented by a single weighted average value between the inlet and the outlet. An element may also represent a single subdivision or increment of a physical component, such as a heat exchanger, that is discretized into several control volumes. A node represents the connection point between elements, which may also be a physical reservoir or tank. Nodes may therefore have multiple inlets and outlets with the fluid properties within a node assumed to be homogeneous and represented by a single averaged value.
MLPs form the foundation for PINNs, however, the loss functions for PINNs are constructed differently from those for MLPs. Instead of considering the difference between the predicted and target values, the governing physics equations for the system being modeled are embedded directly into the PINN loss function. For thermofluid process modeling applications, the governing physics equations are the mass, energy, and momentum balance equations. The mass flow rate (), total enthalpy (), and total pressure () are the fundamentally conserved quantities in the respective balance equations. These quantities are therefore the target parameters for which the PINN models generate predictions. The mass and energy balance equations are written for each node, while the momentum balance equation is written between the inlet and outlet of each element.
The generic forms of the balance equations are derived under the assumption of one-dimensional, steady-state flow through the network elements and are given by:
Mass balance (written for each node):
Energy balance (written for each node):
Momentum balance (written for each element):
is the rate of heat transfer to the fluid, is the rate of work done by the fluid, is the total pressure rise due to work done on the fluid, and is the total pressure loss. For the purposes of the high-level integrated analysis that is the focus here, it will be assumed that the differences in the kinetic and potential energy terms between the inlets and outlets that form part of the total enthalpy and total pressure are negligible. This means that the total property values may be approximated with the static property values, and therefore and in Equations (4) and (5), respectively.
The values of the terms in the different balance equations are typically of different orders of magnitude and dependent on the specific application. For instance, one could find that
,
, and
. These large differences will result in the energy balance equations providing larger contributions to the overall PINN loss function than the mass or momentum balance equations. As a result, the optimizer will be biased towards minimizing the disproportionately large energy balance losses during the training of the PINN, while neglecting the smaller mass and momentum losses [
1]. This biased optimization process is highly undesirable as it ultimately leads to prolonged training times and inaccurate results. To prevent this, the conserved variables are normalized, and the balance equations are implemented in their non-dimensional (i.e., normalized) form. The normalized variables are defined as:
In Equation (6), * denotes a non-dimensional variable. The variables are normalized using reference quantities (i.e., ). The magnitudes of these reference quantities are selected such that they represented the maximum physically realistic values of the relevant variables for the specific thermofluid system.
The balance equations are applied throughout the thermofluid system to generate a set of residual functions. This entails writing the normalized balance equations with all quantities on one side of the equal sign. Using this approach, the generic residual loss functions for thermofluid systems are given as:
The different residual functions for the balance equations are then collected to form combined residual loss functions. The combined mass balance residual (
, energy balance residual (
, and momentum balance residual (
are calculated as mean squared losses and are given by:
The residual loss functions are then added together to obtain the overall PINN loss function as follows:
In Equation (13), , , and are user-defined weighting coefficients for the different residual loss functions.
The residual loss functions require the calculation of fluid properties and component characteristics for various thermofluid network components, such as specific work, specific heat, and pressure change, as inputs. The generic forms of the component characteristic equations are given as follows:
Total pressure rise due to work done on the fluid:
with
the total pressure ratio over the machine.
Total pressure loss:
with
the average fluid density and
a non-dimensional total pressure loss factor.
Rate of work done by the fluid:
with
the isentropic efficiency of the machine and
the isentropic outlet enthalpy.
Rate of heat transfer to the fluid:
with
the heat exchanger’s effectiveness,
the maximum possible rate of heat transfer, and the subscripts
and
referring to the hot and cold fluid streams, respectively.
In Equations (17) and (18), the maximum possible rate of heat transfer across the heat exchanger (
) is given by:
with the maximum possible rates of heat transfer for the hot and cold fluid streams, respectively, defined as:
In Equation (20), and are the enthalpy of the hot fluid at the inlet temperature of the cold fluid and the hot fluid, respectively, and in Equation (21) and are the enthalpy of the cold fluid at the inlet temperature of the hot fluid and the cold fluid, respectively.
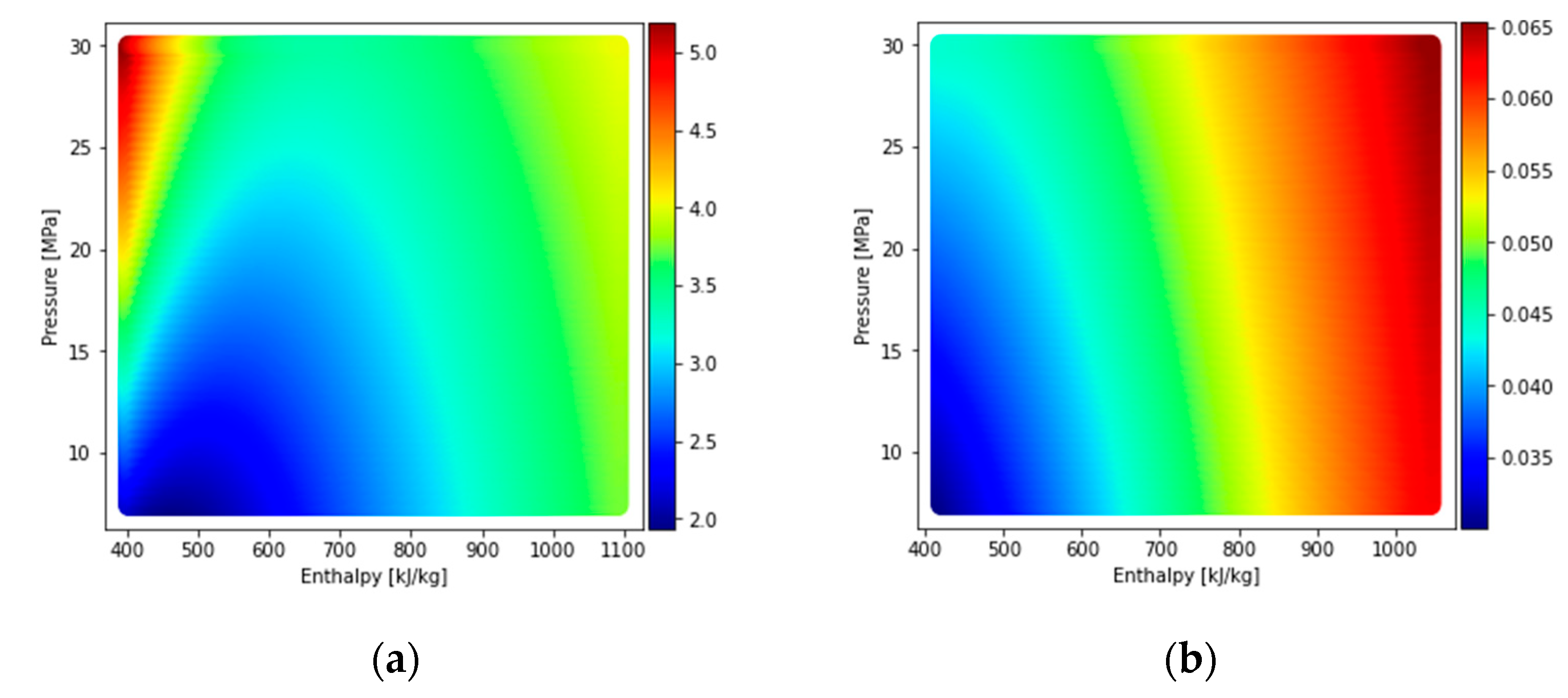
In this work, the component characteristics are calculated within the PINN loss function. However, the required fluid properties are updated outside the loss function and then fed into the loss function for each evaluation. The fluid property calculations introduce additional non-linearities for which the PINN models need to account, over and above the set of non-linear balance and component characteristic equations. In this work, a bicubic interpolation scheme was applied to produce a set of non-linear interpolation functions capable of accurately approximating any required fluid properties given an input set of pressure and enthalpy values. The actual fluid properties used to generate these functions were obtained from the CoolProp fluid property library [
20].
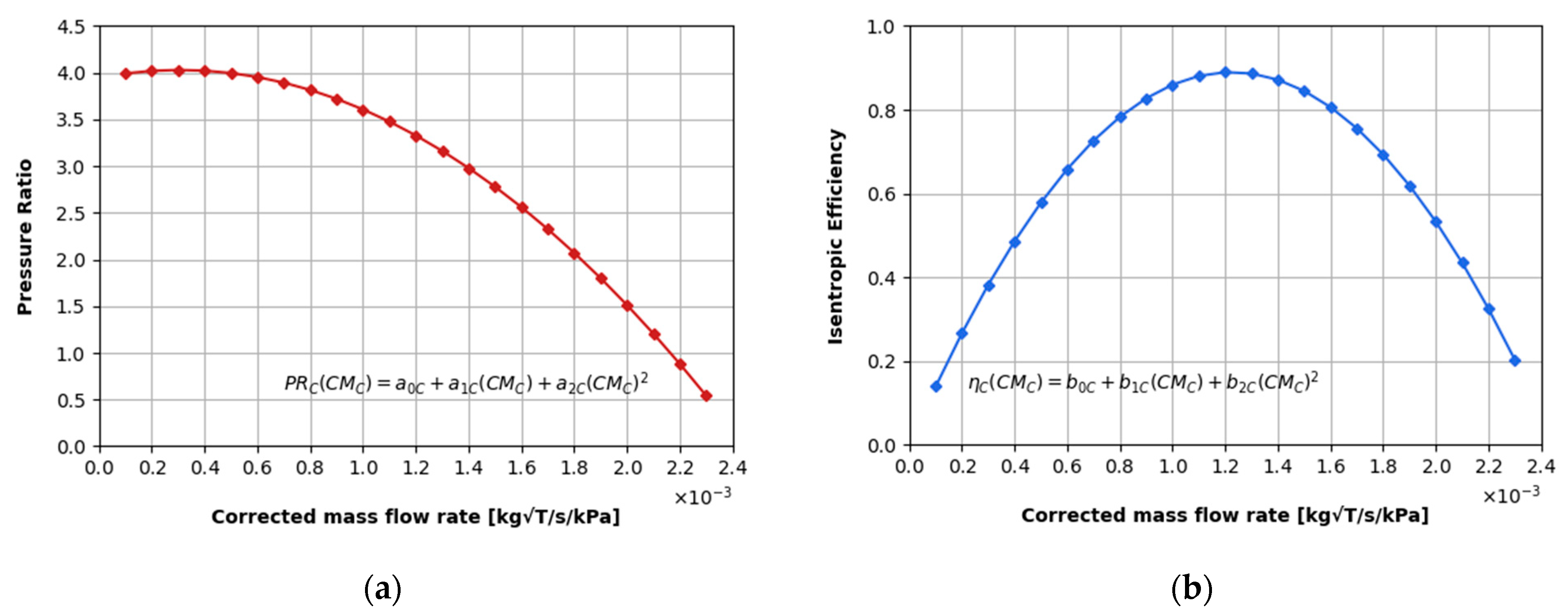
Figure 3 provides two examples of non-linear fluid property relationships that were captured using the bicubic interpolation scheme.
Besides the conserved variables (
), there may also be other fluid properties (such as temperature
) and/or component characteristic variables (such as a pressure loss coefficient
) that form part of the input features of the neural network. It is also important to normalize these parameters to obtain a normalized input feature vector in order to minimize the training time [
21].
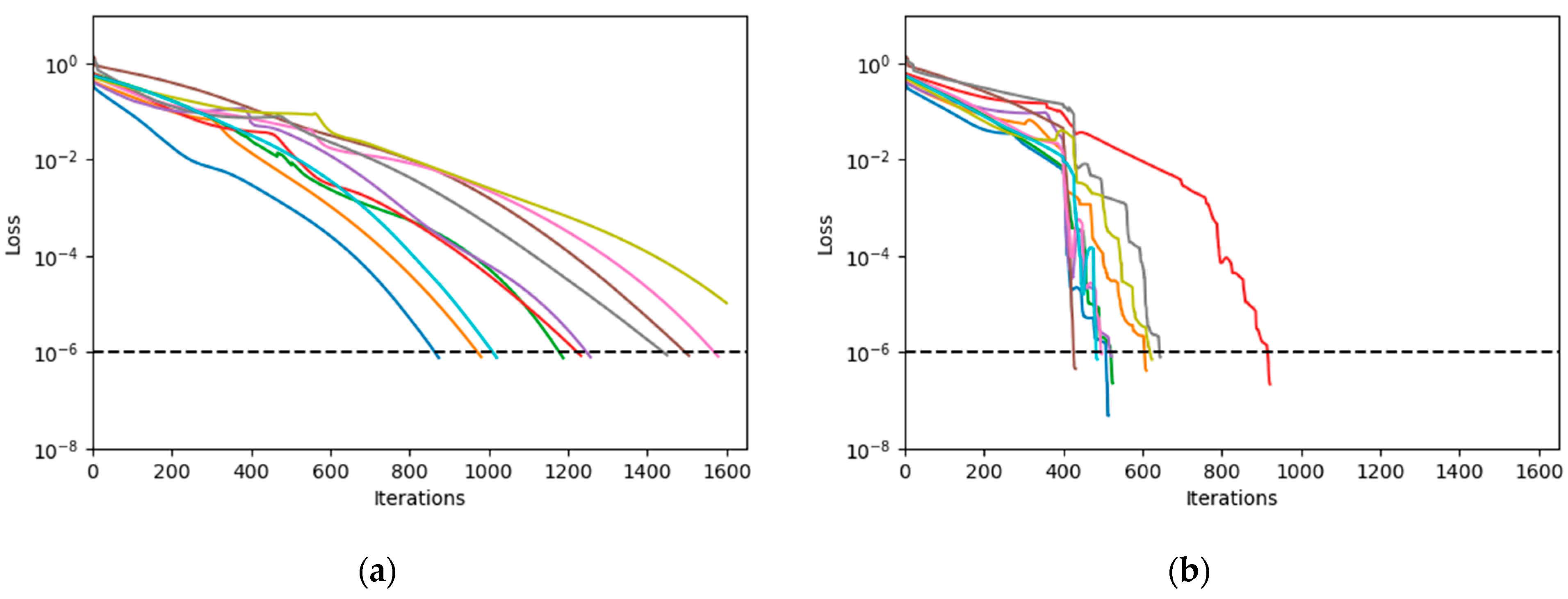
Two different optimization approaches were used to train the PINN model. One set of PINN models was trained using only the first-order Adam optimization algorithm [
22] to update the network parameters. Adam was selected as the optimization algorithm for this work as it has been shown to outperform other optimization algorithms when training PINNs [
23]. A second set of PINN models was trained using a hybrid optimizer in which the Adam optimizer was initially used to prime the parameters before a second-order optimizer was applied in conjunction with the Adam optimizer to train the network to convergence [
24]. The truncated Newton method (TNC) was used as the second-order optimizer and implemented by coupling the
SciPy minimize function with the neural network built in
TensorFlow. When applying both a first- and second-order optimizer, the PINN model must first be trained using only the first-order optimizer for a set number of iterations before being refined using the second-order optimizer. This prevents the model from converging to a local minimum too quickly, as would be the case if the second-order optimizer was implemented on its own [
24]. In this work, the first 400 iterations of the optimization process were completed using Adam before the TNC optimizer was applied.
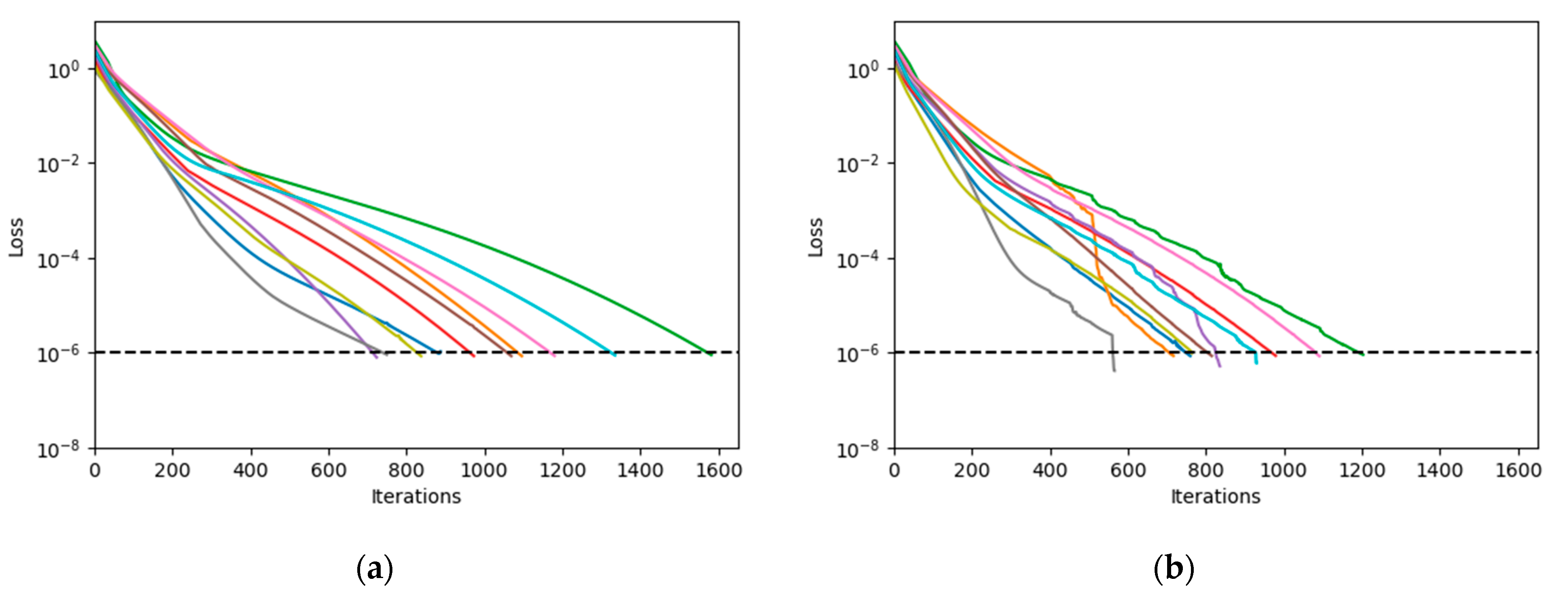
In this work, the optimization process was primarily terminated based on a tolerance value for the total model loss. This ensured that the PINN models achieved a certain level of accuracy in their predictions. The value of 1 × 10−6 was selected as the desired tolerance for the total model loss. A second restriction of a maximum number of iterations was placed on the optimization process of the PINN models to prevent the process from running indefinitely, should the models not be able to reach the desired tolerance specified above.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}