
Double Closed-Loop Compound Control Strategy for Magnetic Liquid Double Suspension Bearing


Abstract
:1. Introduction
2. Dynamic Model and Step Response of Supporting System in CFC Mode
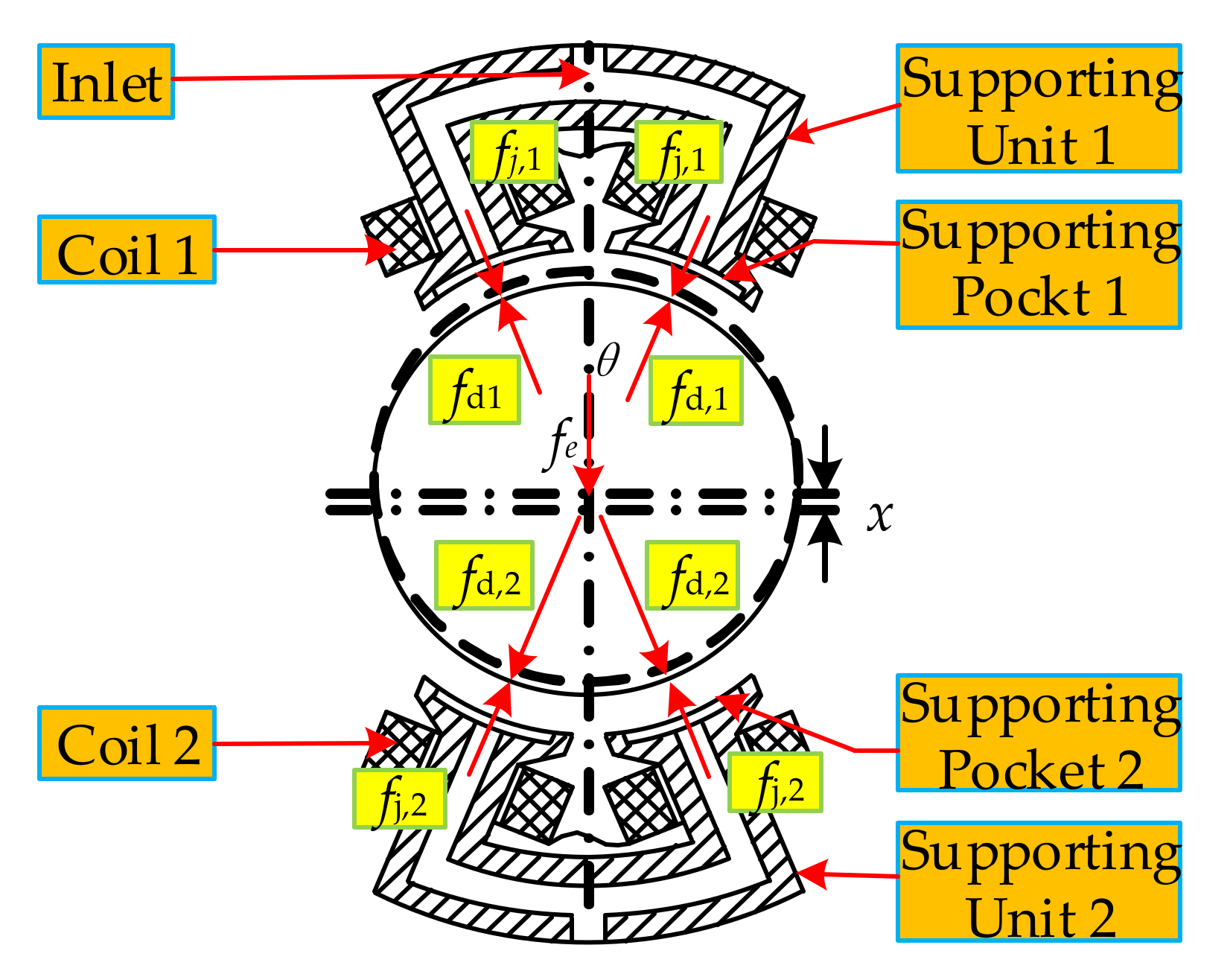
2.1. Mathematical Model of Supporting System in CFC Mode
- (1)
- The inertia force of the lubricant is ignored.
- (2)
- The viscosity–pressure characteristics of the liquid are ignored.
- (3)
- The coil flux leakage is ignored, considering that the coil flux is distributed uniformly in the magnetic circuit.
- (4)
- The magnetic resistance in the iron core and rotor is ignored, and the magnetic potential only acts on the air gap.
- (5)
- The magnetic hysteresis and eddy current of the magnetic materials are ignored.
- (6)
- The hydraumatic bearing surface is assumed as a rigid body.
- (7)
- The rotor gravity is ignored.
2.2. Step Response Analysis in CFC Mode
3. Numerical Simulation of the Rotor Impact-Rubbing Process under Electromagnetic Failure
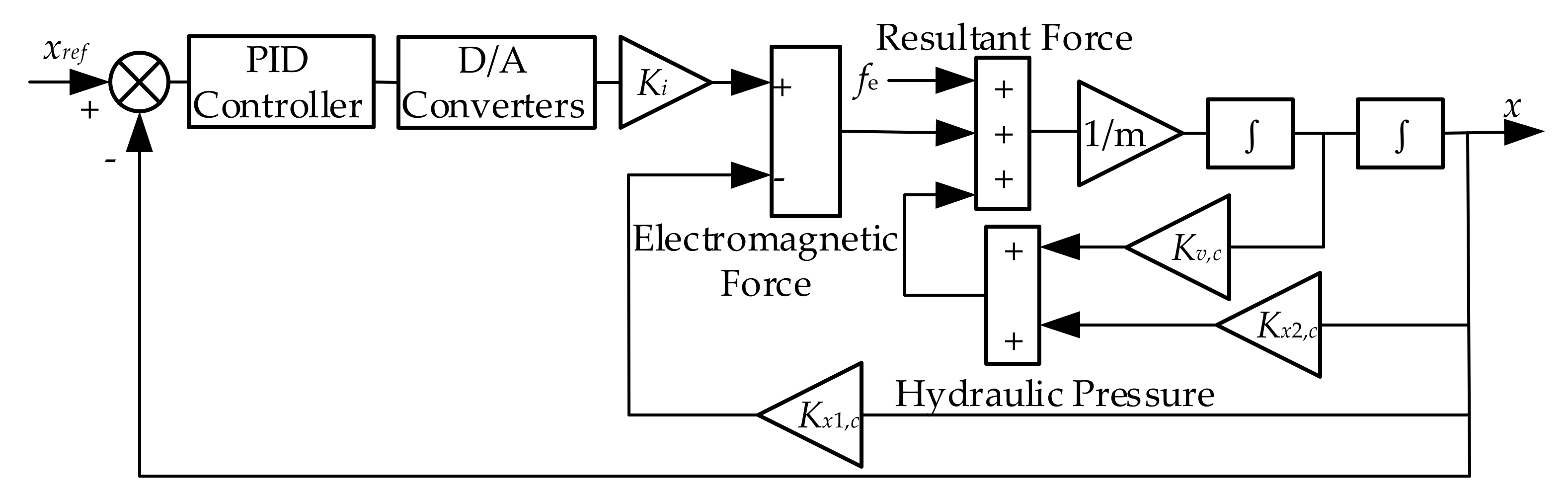
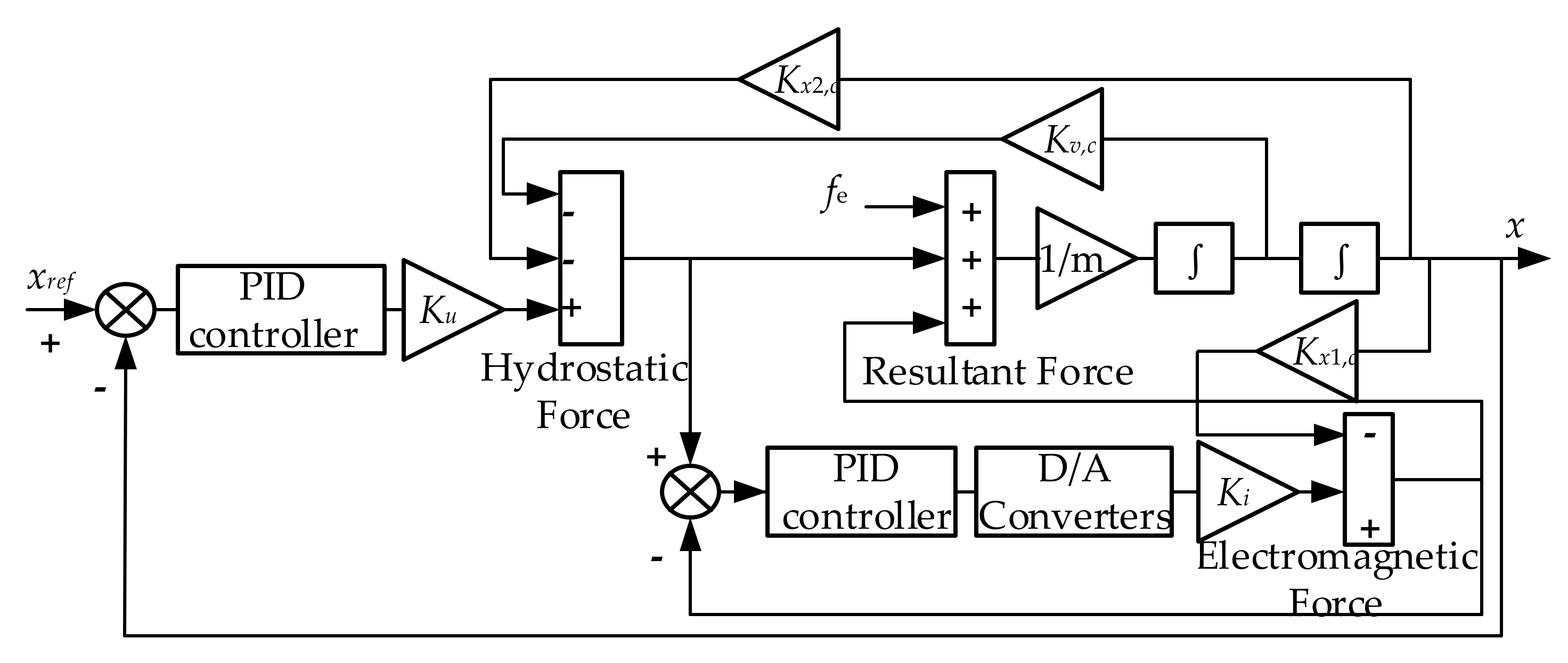
3.1. Mathematical Model of Supporting System under DCL Control
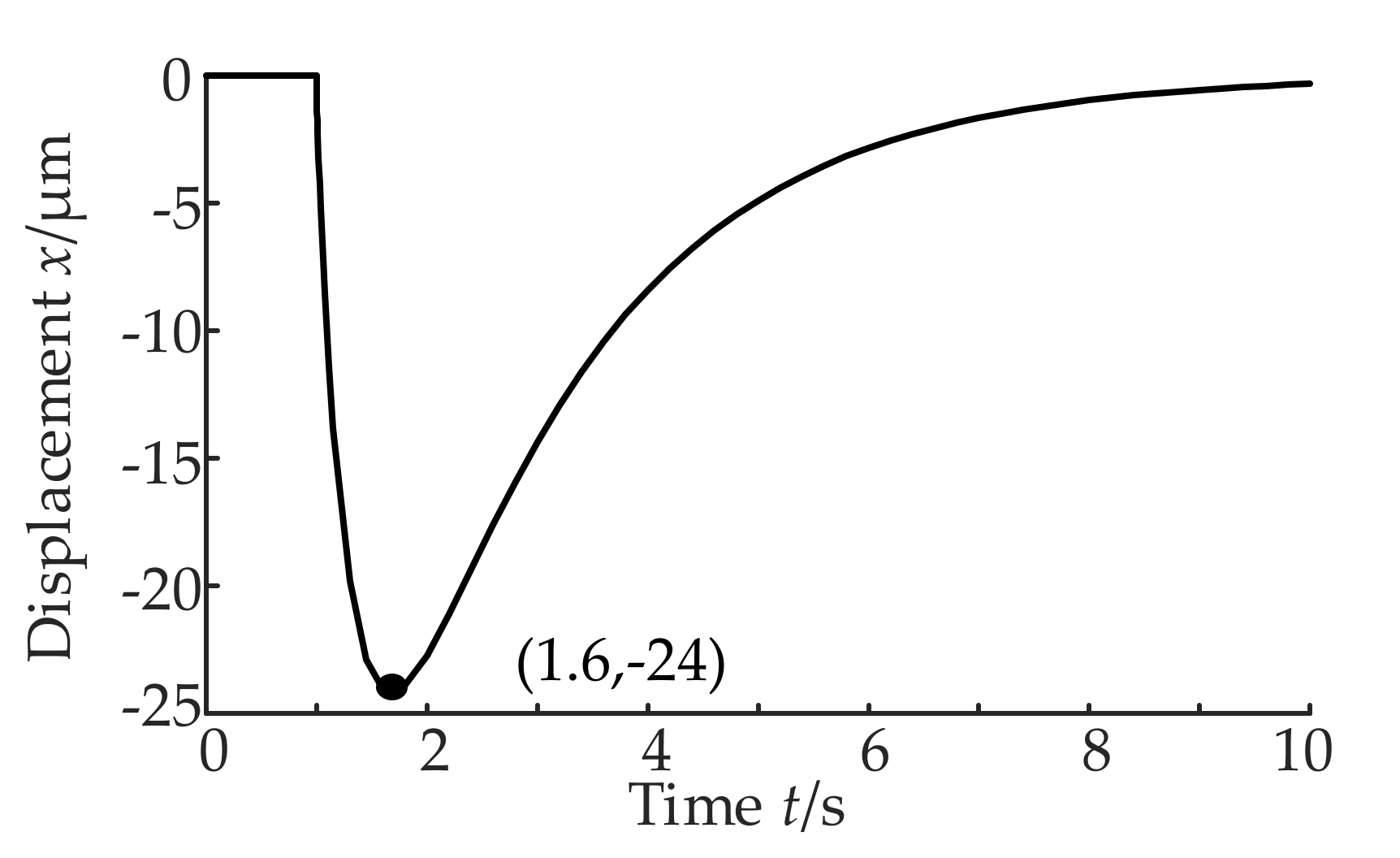
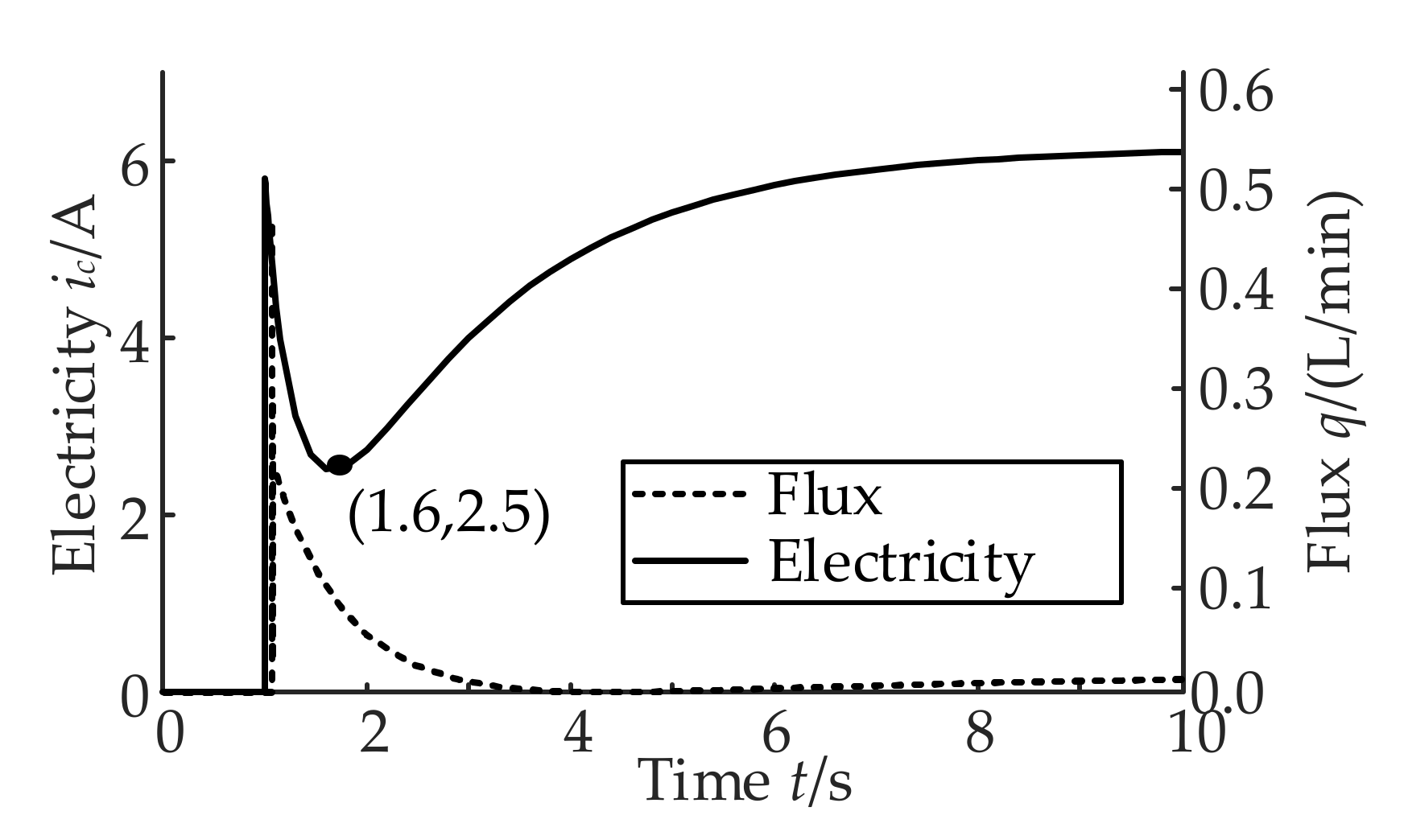
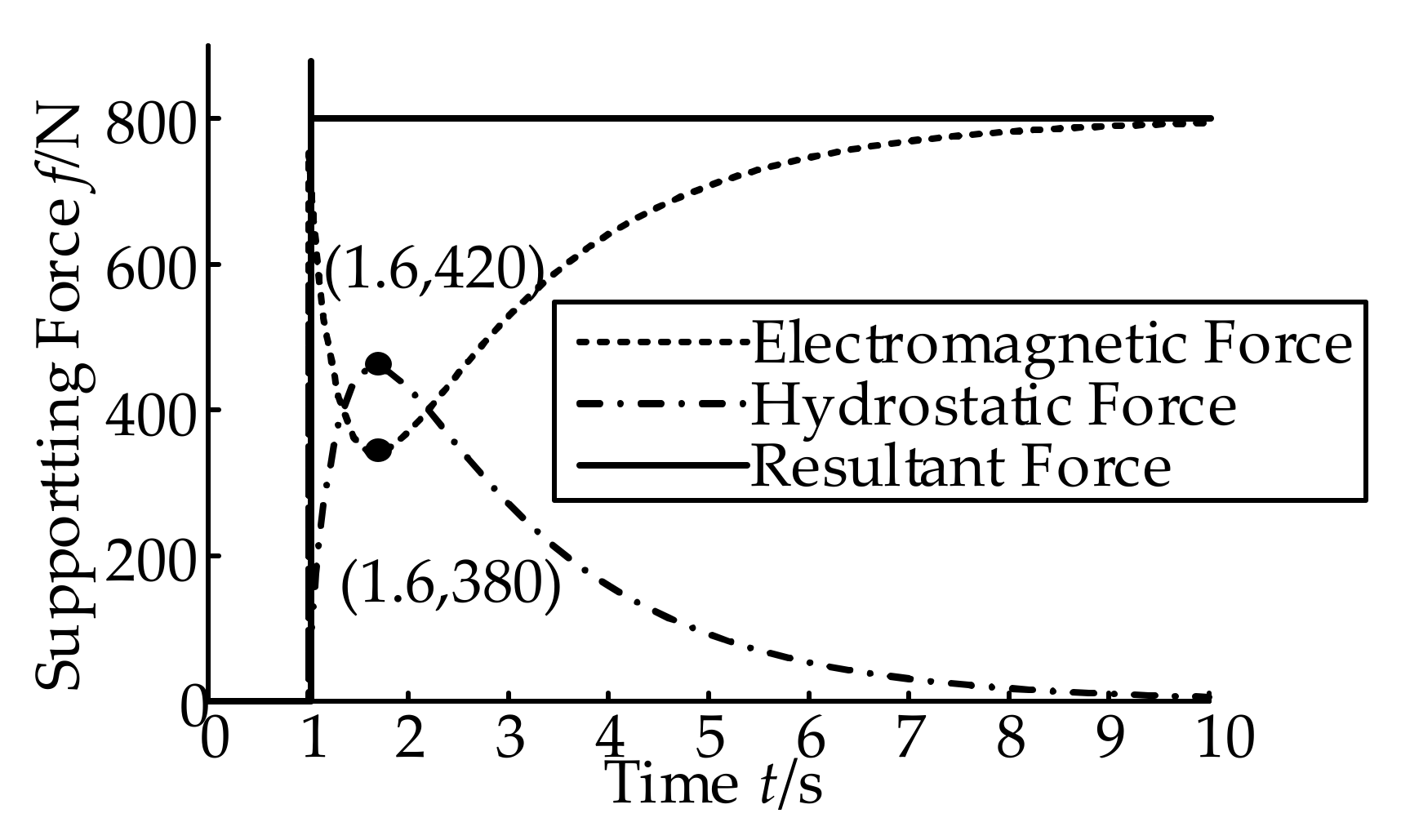
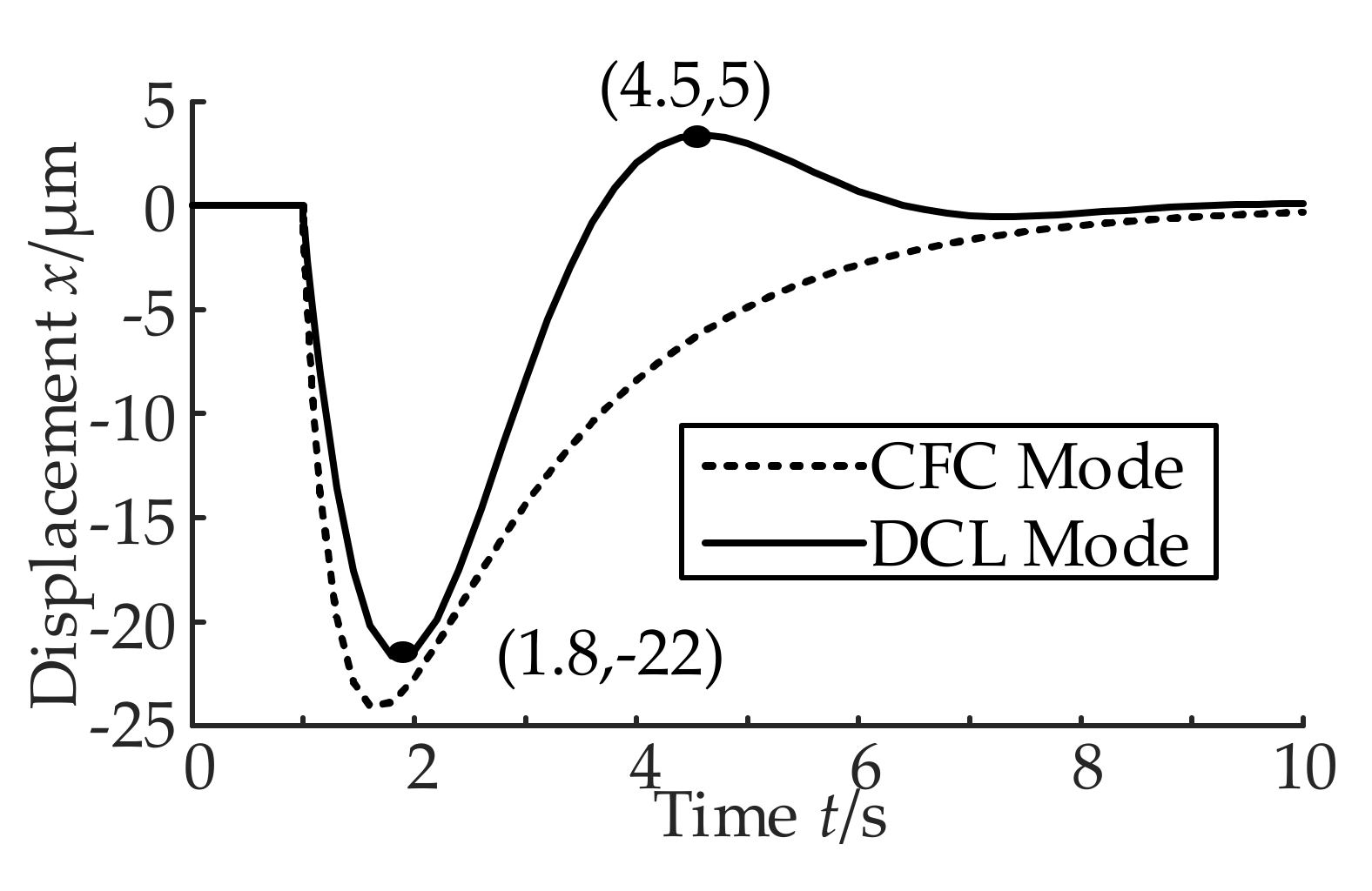
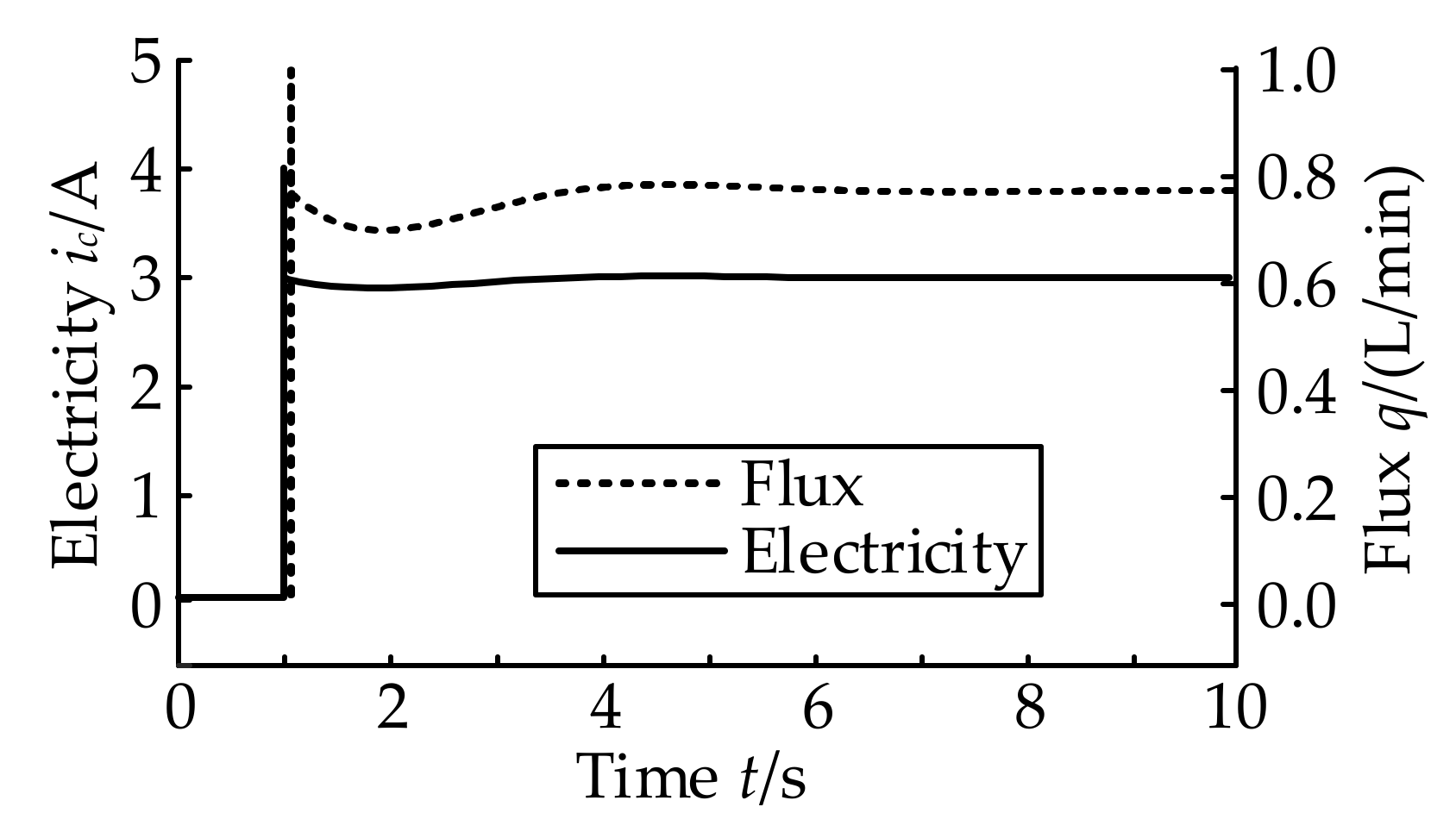
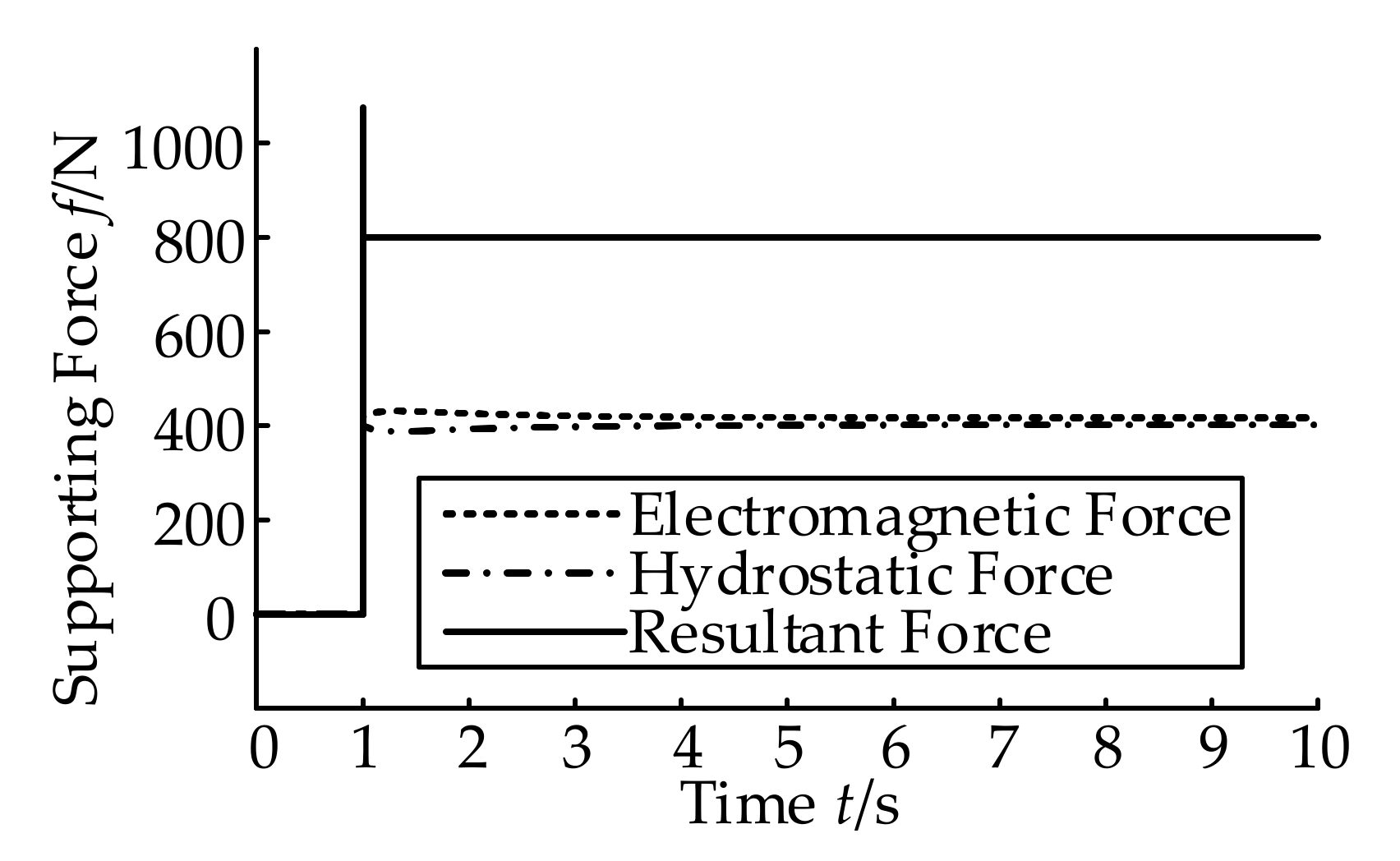
3.2. Simulation Analysis in DCL Mode under Step Response
4. Analysis of Dynamic and Static Characteristics in Different Modes
4.1. Index of Characteristic
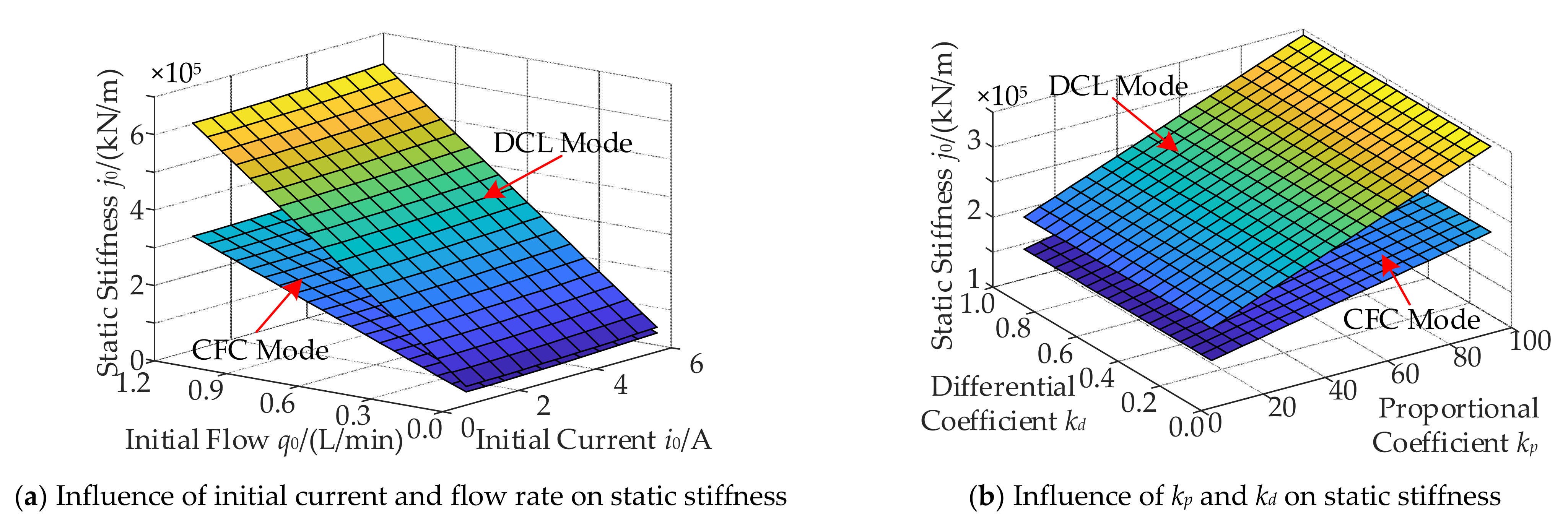
4.2. Variation Law of Static Stiffness with Parameters
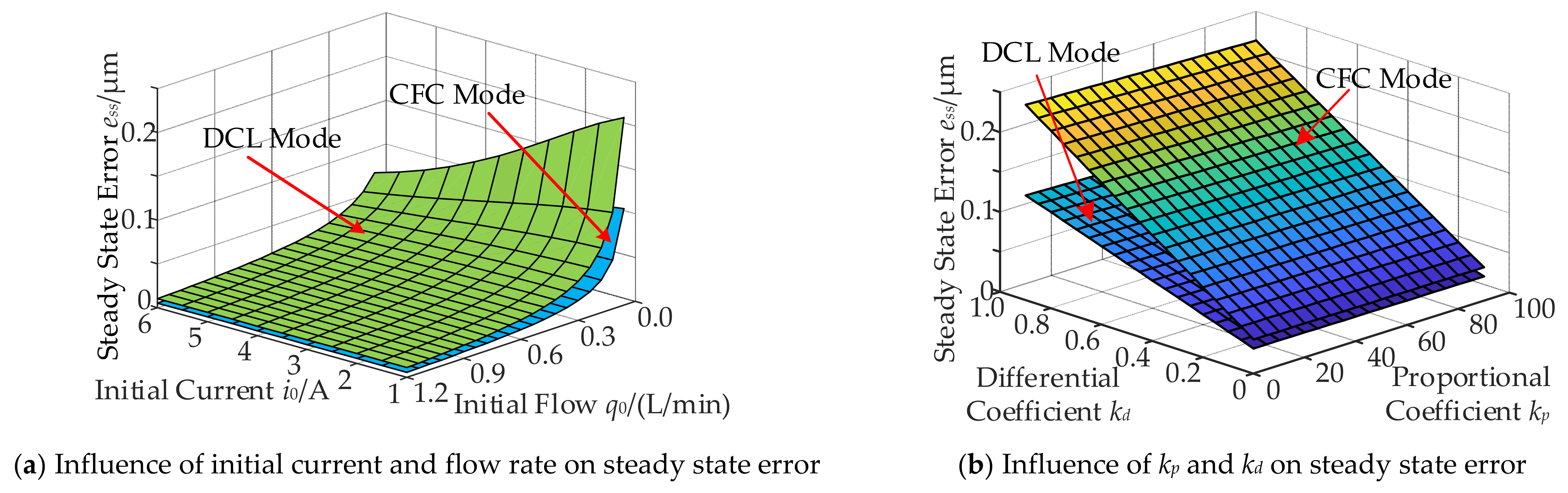
4.3. Variation Law of Steady-State Error with Parameters
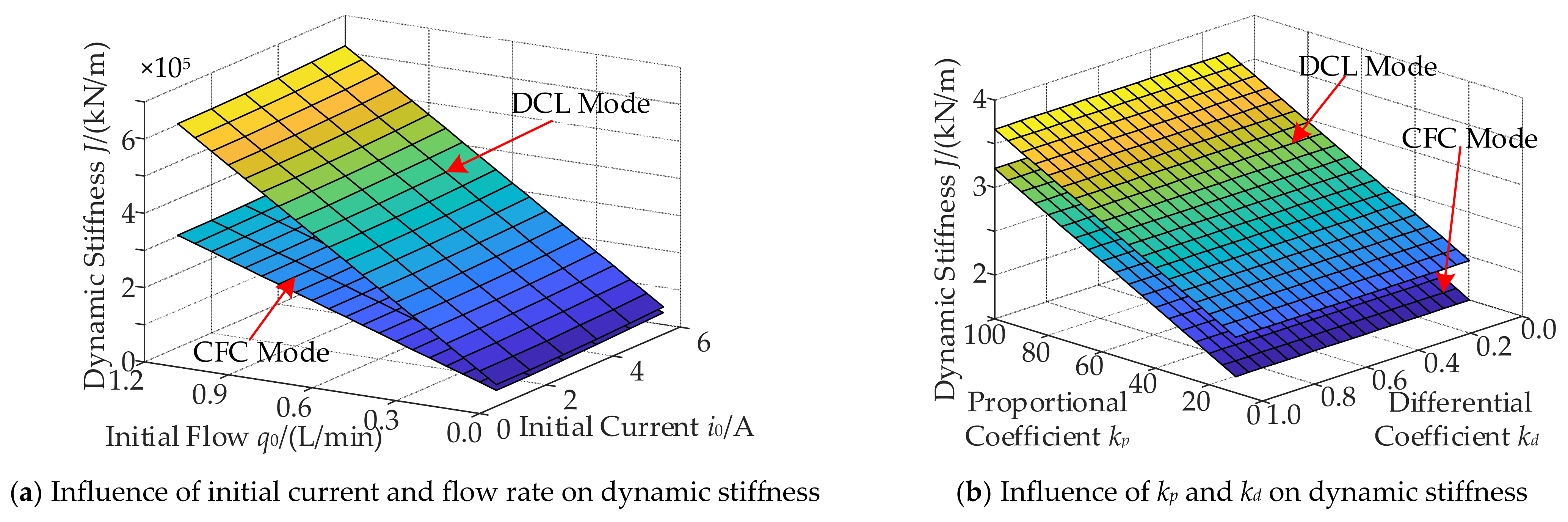
4.4. Variation Law of Dynamic Stiffness with Parameters
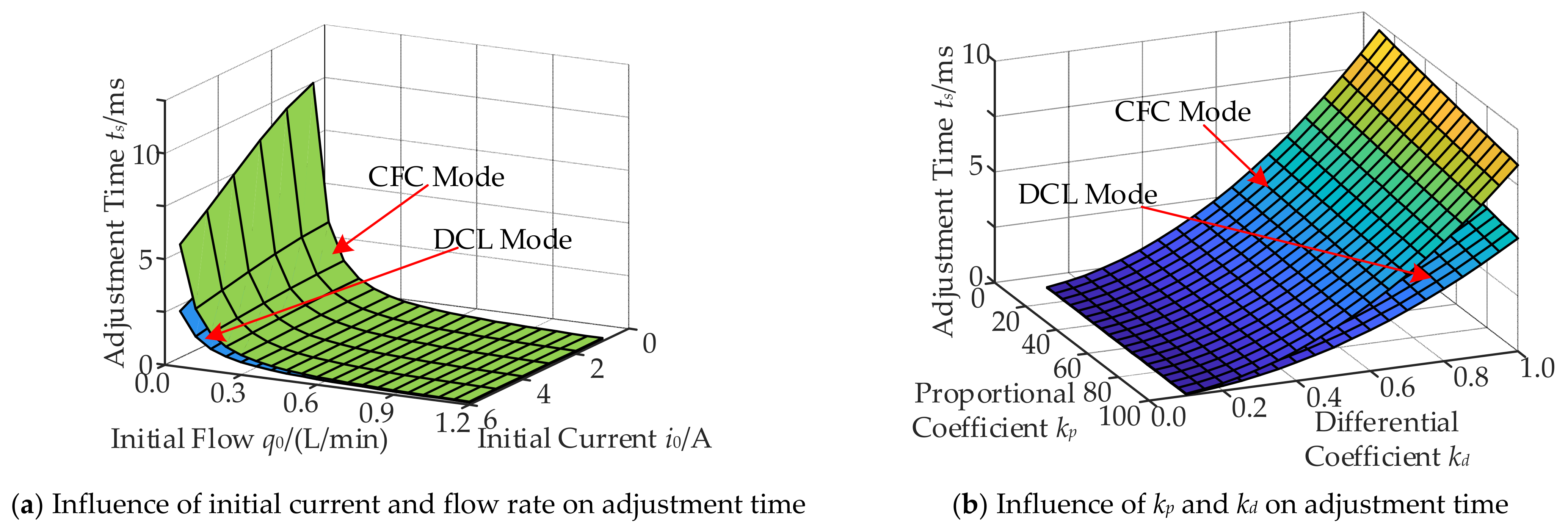
4.5. Variation Law of Adjustment Time with Parameters
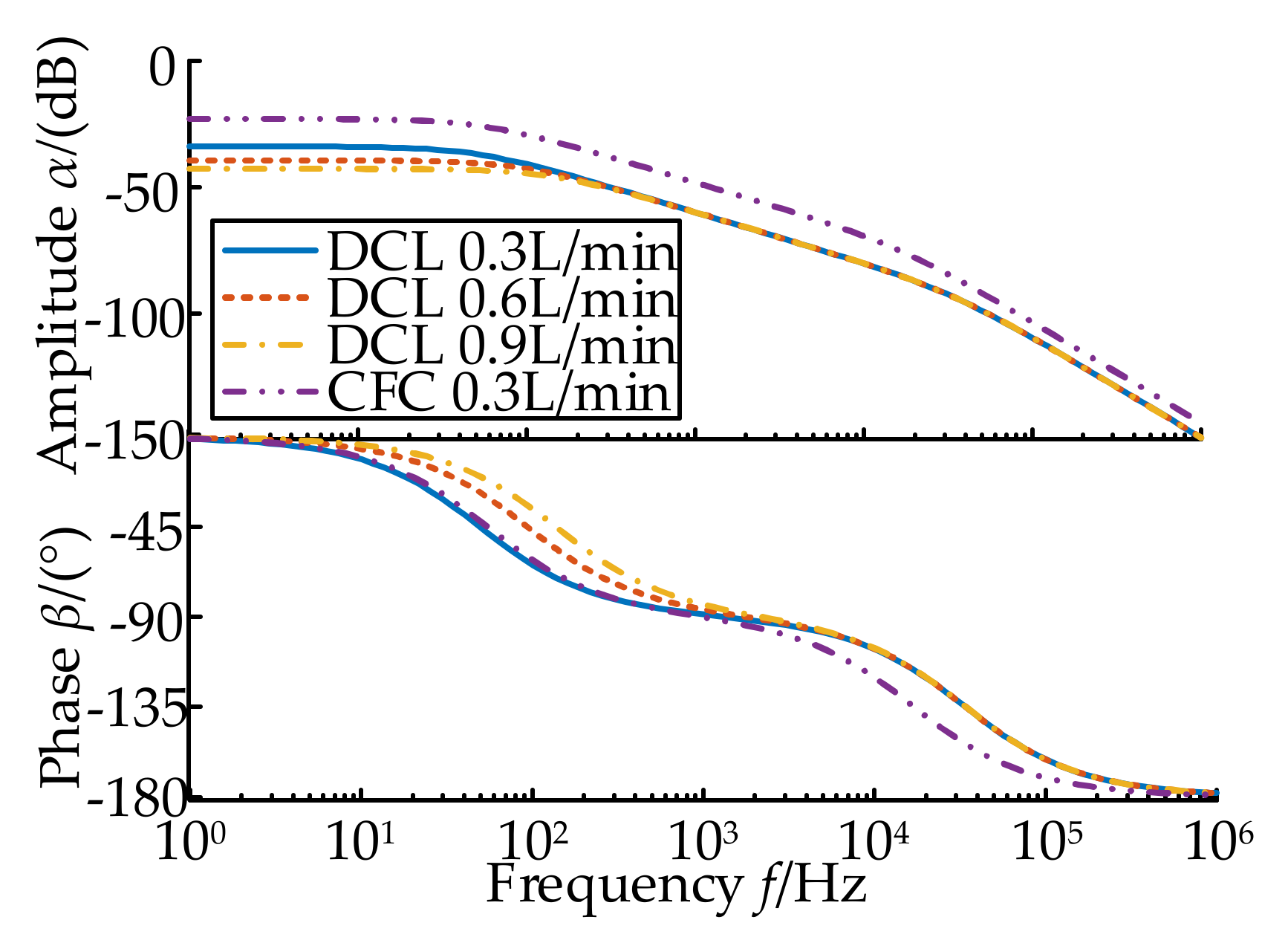
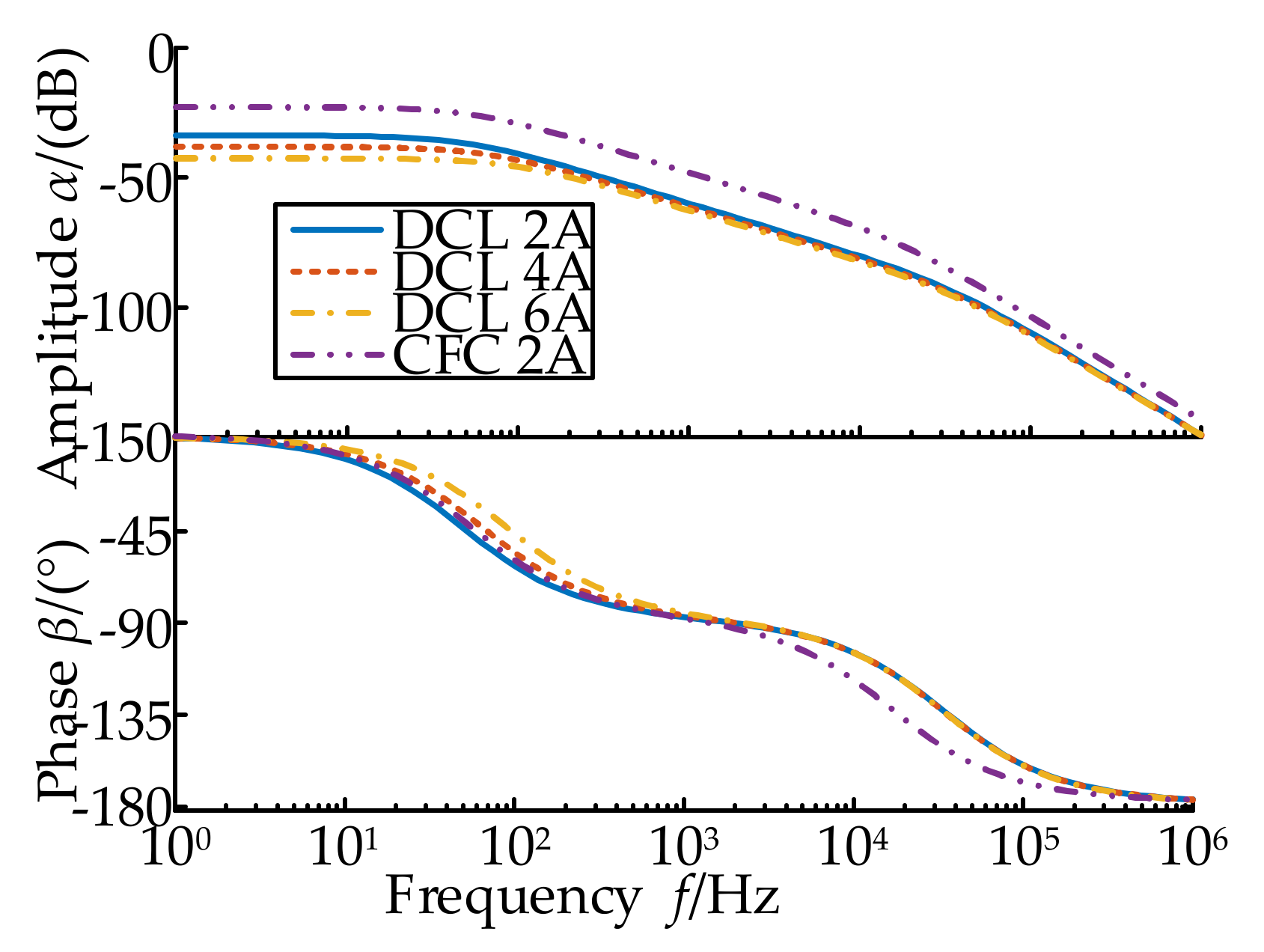
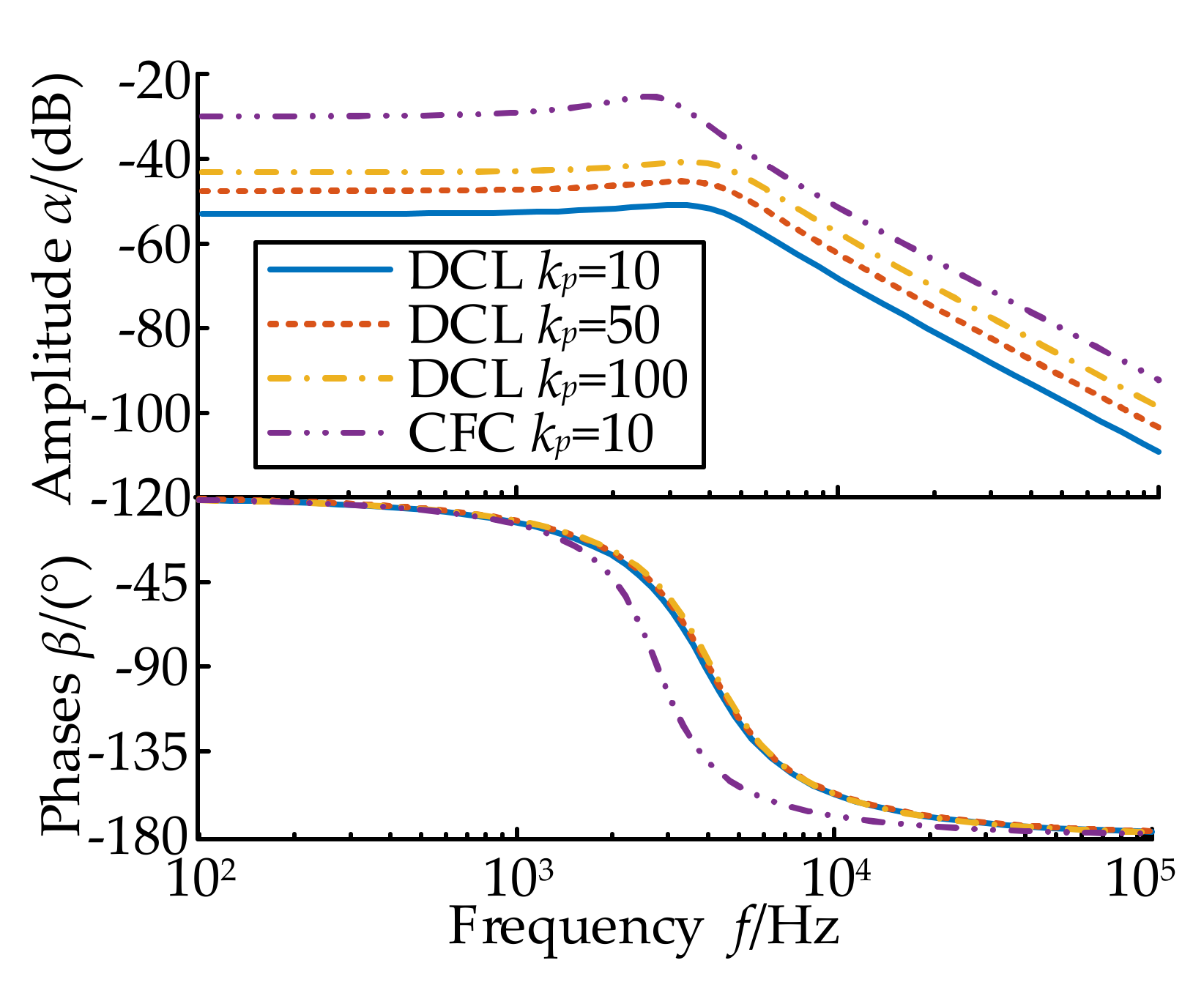
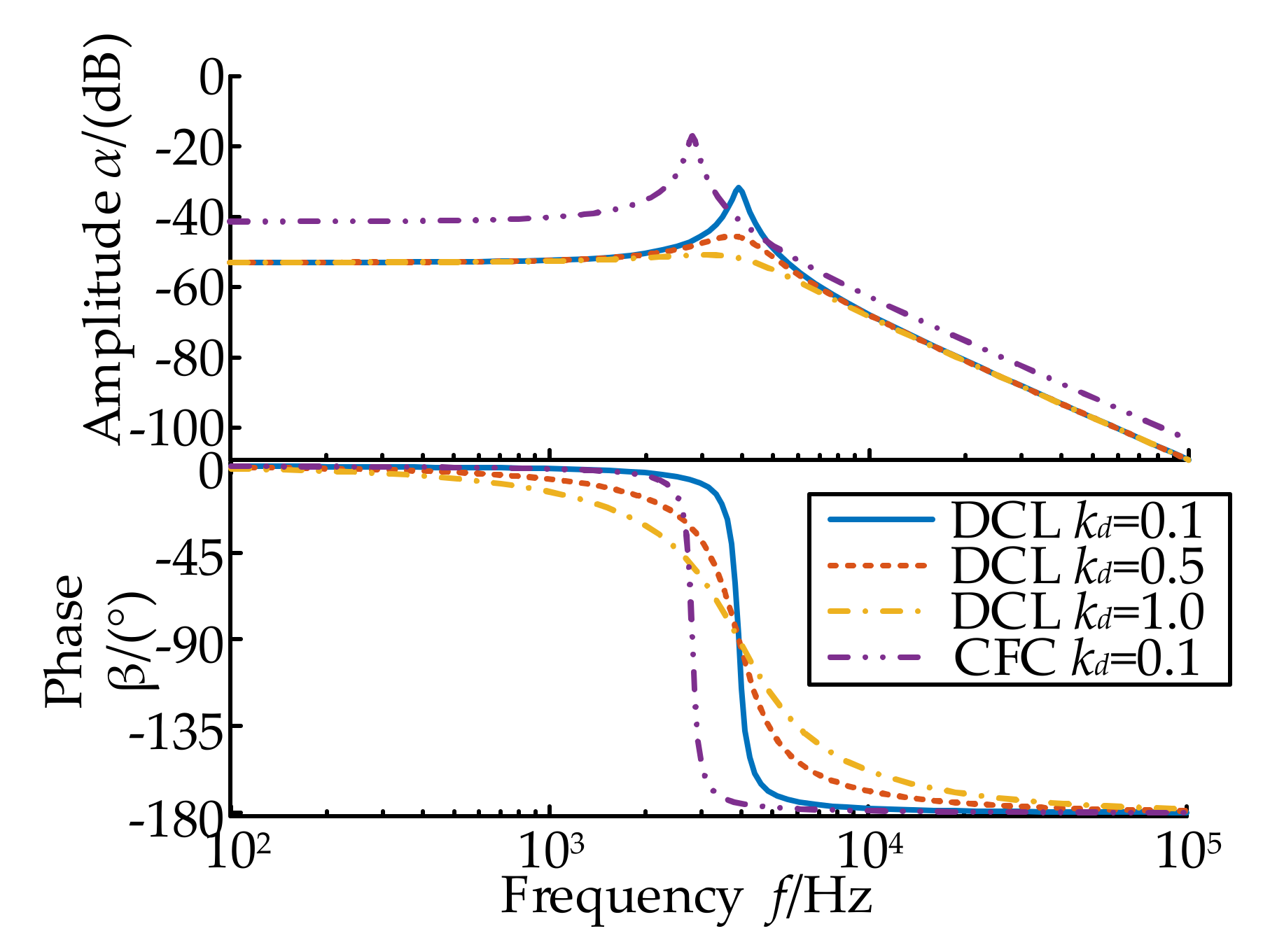
4.6. Variation Law of Amplitude–Phase Curve with Parameters
5. Conclusions
- (1)
- In DCL mode, the displacement was smaller and the adjustment time was shorter, and the hydrostatic force and electromagnetic force retained a certain proportion.
- (2)
- Increasing the initial current and the initial flow can improve the dynamic and static characteristics of the MLDSB. However, as the oil film thickness is smaller than the electromagnetic air gap, the initial flow has a stronger effect on the dynamic and static characteristics.
- (3)
- In DCL mode, the static and dynamic stiffnesses are greater and the adjustment time is shorter, but the steady-state error is larger than that in CFC mode.
- (4)
- Increasing kp can improve the stiffness and reduce the adjustment time and steady-state error. However, excessive kp will lead to instability of the MLDSB. The steady-state error, adjustment time, and damping increased with an increase in kd, but kd had little effect on the stiffness of the MLDSB.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, .H.; Zhang, G.J.; Cao, B.; Gao, D.R.; Du, D.J. Decouping Control of Single DOF Supporting System of Magnetic-Liquid Double Suspension Bearing. Mach. Tool Hydraul. 2020, 48, 1–8. [Google Scholar]
- Zhao, J.; Yan, W.D.; Wang, Z.Q.; Gao, D.; Du, D. Study on Clearance-Rubbing Dynamic Behavior of 2-DOF Supporting System of Magnetic-Liquid Double Suspension Bearing. Processes 2020, 8, 973. [Google Scholar] [CrossRef]
- Chen, R.; Li, H.W.; Tian, J. The Relationship Between the Number of Magnetic Poles and the Bearing Capacity of Radial Magnetic Bearing. J. Shandong Univ. 2018, 48, 81–85. [Google Scholar]
- Seokwon, L.; Heon, H. Development of Magnetic Bearing Controller with High Magnetic Levitation Accuracy. J. Inst. Internet Broadcast. Commun. 2019, 19, 225–229. [Google Scholar]
- Puskaric, M.; Car, Z.; Bulic, N. Magnetic Bearing Control System based on PI and PID Controllers. Teh. Vjesn. 2018, 25, 136–140. [Google Scholar]
- Wang, Y.Z.; Jiang, D.; Yin, Z.W.; Gao, G.Y.; Zhang, X.L. Load Capacity Analysis of Water Lubricated Hydrostatic Thrust Bearing Based on CFD. J. Donghua Univ. Nat. Sci. 2015, 41, 428–432. [Google Scholar]
- Chen, B.X.; Wang, Y. Vertical Control of 6-DOF Pneumatic Platform Based on Optimized Neural Network A Lgorithm. Comput. Simul. 2018, 35, 315–319. [Google Scholar]
- Li, H.F.; Lin, K.; Li, B.; Li, G. Position and Current Double Closed Loop Control of Reaction Sphere Actuator Based on Quaternion. Trans. China Electrotech. Soc. 2019, 24, 484–492. [Google Scholar]
- Li, H.X.; Lin, C.; Tang, H.Y. Double Closed Loop DC Motor Speed Control System Based on Fuzzy Control. Electr. Drive 2019, 49, 22–26. [Google Scholar]
- Yang, H.; Liu, L.; Yan, Z.A.; Yang, X. A Fuzzy Control Strategy for Buck Converter System of Double Closed Loop Circuits. J. Xi’an Jiaotong Univ. 2016, 50, 35–40. [Google Scholar]
- Liu, G.; Pan, M. Design of FPGA-based Self-repairing AMB Controller for MSFW. Opt. Precis. Eng. 2009, 17, 2762–2770. [Google Scholar]
- Qi, W.C.; Li, Y.M.; Zhang, H.; Qin, C.; Liu, C.; Yin, Y. Double Closed Loop Fuzzy PID Control Method of Tractor Body Leveling on Hilly and Mountations Areas. Trans. Chin. Soc. Agric. Mach. 2019, 50, 17–23. [Google Scholar]
- Zhu, H.Q.; Zhao, Y.L.; Hu, Y.M.; Zhu, S. Compensation Strategy of Suspension Force for a Bearingless Permanent Magnet Slice Moter under Dynamic Disturbance. J. Vib. Shock 2017, 36, 99–105. [Google Scholar]
- Li, Y.H.; Yu, S.J.; Zhang, Y.F. Heading Optimizing Dynamic Positioning of Cable-laying Vessel under Fuzzy-PID Synthesis Control. Ship Sci. Technol. 2016, 38, 39–43. [Google Scholar]
- Wang, X.B.; Zhu, C.S. Multi-frequency Compensation for Active Magnetic Bearing-Flexible Rotor System Based on Adaptive Least Mean Square Algorithm with a Phase Shift. J. Mech. Eng. 2021, 57, 1–10. [Google Scholar]
- Zhu, H.Q.; Fan, S. Soft-sensing Modeling for Rotor Displacements of Six-pole Radial Active Magnetic Bearing Using Improved Continuous Hidden Markov Model. Proc. CSEE 2021, 41, 3933–3943. [Google Scholar]
- Zhao, H.; Wu, X.C.; Wang, J.; Wang, Q.; Chen, T.; Zhang, B.; Gao, D.R. Influence of Oil Sealing Belt on Dynamic and Static Characteristic of Closed Type Liquid Hydrostatic Slide. Mach. Tool Hydraul. 2018, 46, 47–53. [Google Scholar]
- Reza, E.; Mostafa, G.; Mohammad, K. Nonlinear Dynamic Analysis and Experimental Verification of a Magnetically Supported Flexible Rotor System with Auxiliary Bearings. Mech. Mach. Theory 2018, 121, 545–562. [Google Scholar]
- Zhao, H.; Chen, T.; Wang, Q.; Zhang, B.; Gao, D.R. Stability Analysis of Single DOF Support System of Magnetic-Liquid Double Suspension Bearing. Mach. Tool Hydraul. 2019, 47, 1–7. [Google Scholar]
- Liu, H.T.; Su, Z.Z.; Wu, L.T. Analysis and Experimental Method of Static Bearing Characteristics for Magnetic Bearing. Electr. Mach. Control Appl. 2017, 44, 93–98. [Google Scholar]
- Wang, X.Q.; Li, B.; Li, S.S.; Jia, Y. Study on the Static Characteristics of Spiral Groove Small Orifice Throttle Hybrid Gas Bearing. Lubr. Eng. 2021, 46, 51–56. [Google Scholar]
- Jiang, K.J.; Zhu, C.S. Parameter Identification for Stiffness and Damping of Active Magnetic Bearing in Flexible Rotor System. J. Vib. Eng. 2017, 30, 883–892. [Google Scholar]
- Zhang, C.C.; Wang, N.X.; Wang, D.X. Dynamic Characteristics of Magnetic Suspended Dual-Rotor System with Uncertain Parameters. Modul. Mach. Tool Autom. Manuf. Technol. 2021, 3, 14–20. [Google Scholar]
- Yang, S.P.; Ren, Y.W.; Yu, H.T. Design and Research of Maglev Supporting for Implantable Blood Pump. Mach. Tool Hydraul. 2018, 46, 87–90. [Google Scholar]
- Jiang, Q.L.; Hu, Z.Q. Improved Incomplete Derivative PID Control of Axial Active Magnetic Bearing. J. Southwest Jiaotong Univ. 2018, 46, 87–90. [Google Scholar]
- Shang, Y.J.; Lin, Z.; Liu, X.J.; Xin, X. Impact of Hydrostatic Bearing on the Dynamic Performance of Electric Spindle Rotor Device. Mech. Sci. Technol. Aerosp. Eng. 2015, 34, 688–693. [Google Scholar]
- Wu, H.C.; Yu, H.T.; Hu, S.; Chen, P. Analysis on Characteristics of Homo-Polar Permanent Biased Radial Magnetic Bearings. Bearing 2018, 7, 40–45. [Google Scholar]
- Chen, L.L.; Zhu, C.S.; Wang, Z.B. Decoupling Control for Active Magnetic Bearing High-speed Flywheel Rotor Based on Mode Separation and State Feedback. Proc. CSEE 2017, 37, 5461–5472. [Google Scholar]
- Sun, B. Research on Coordinated Control Between Under-Excitation Limiter of Excitor and Power System Stabilizer of Synchronous Generator; Southwest Jiaotong University: Chengdu, China, 2018. [Google Scholar]
- Meng, A.H.; Li, M.F.; Pan, Y.L.; Zhou, J. Performance of Pulsed Jet On Off Valve Based on Giant Magneto strictive Actuator. Trans. Chin. Soc. Agric. Mach. 2010, 41, 211–215. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Variable | Size | Dimension |
|---|---|---|---|
| i0 | Biasing circuit | 1.7 | A |
| µ | Dynamic viscosity | 0.04136 | Pa·s |
| m | Mass of rotor | 10 | kg |
| µ0 | Permeability of air | 4π × 10−7 | H/m |
| Ae | Area of supporting cavity | 416 | mm2 |
| Ab | Extrusion area | 56 | mm2 |
| h0 | Oil film thickness | 30 | μm |
| x0 | Air gap | 300 | μm |
| θ | Angle | 22.5 | ° |
| Flow coefficient | 0.68 | dimensionless | |
| A | Area of pole | 1080 | mm2 |
| N | Turns per coil | 50 | dimensionless |
| q0 | Flow | 5.56 × 10−8 | m3/s |
| kp | Proportional coefficient | 100 | dimensionless |
| ki | Integral coefficient | 10 | dimensionless |
| kd | differential coefficient | 1 | dimensionless |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Wang, Y.; Ma, X.; Li, S.; Gao, D.; Du, G. Double Closed-Loop Compound Control Strategy for Magnetic Liquid Double Suspension Bearing. Processes 2021, 9, 1195. https://doi.org/10.3390/pr9071195
Zhao J, Wang Y, Ma X, Li S, Gao D, Du G. Double Closed-Loop Compound Control Strategy for Magnetic Liquid Double Suspension Bearing. Processes. 2021; 9(7):1195. https://doi.org/10.3390/pr9071195
Chicago/Turabian StyleZhao, Jianhua, Yongqiang Wang, Xuchao Ma, Sheng Li, Dianrong Gao, and Guojun Du. 2021. "Double Closed-Loop Compound Control Strategy for Magnetic Liquid Double Suspension Bearing" Processes 9, no. 7: 1195. https://doi.org/10.3390/pr9071195