
Position Output Adaptive Backstepping Control of Electro-Hydraulic Servo Closed-Pump Control System

Abstract
:1. Introduction
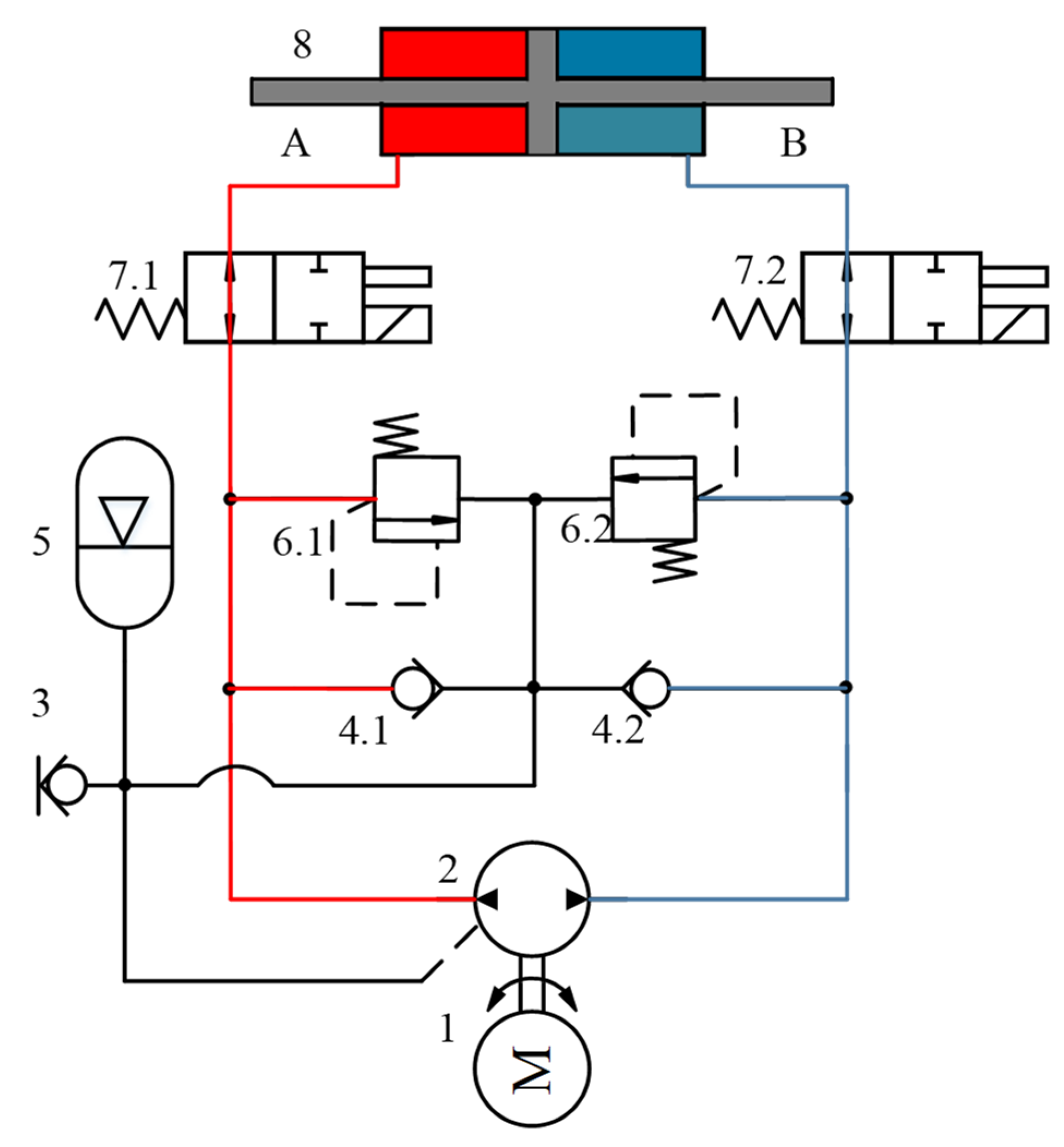
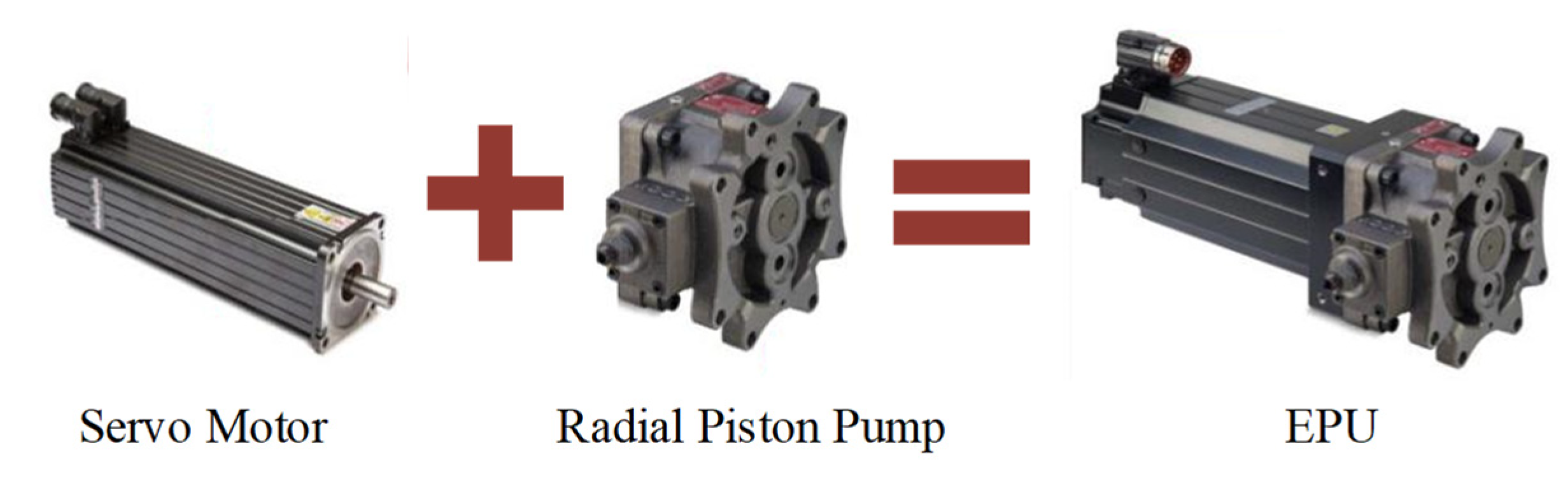
2. Operating Principle of Pump Control System
3. Mathematical Model
3.1. Servo Motor
3.2. Fixed Displacement Pump
3.3. Double-Acting Symmetrical Hydraulic Cylinder
4. Controller Design
5. Experimental Results and Analysis
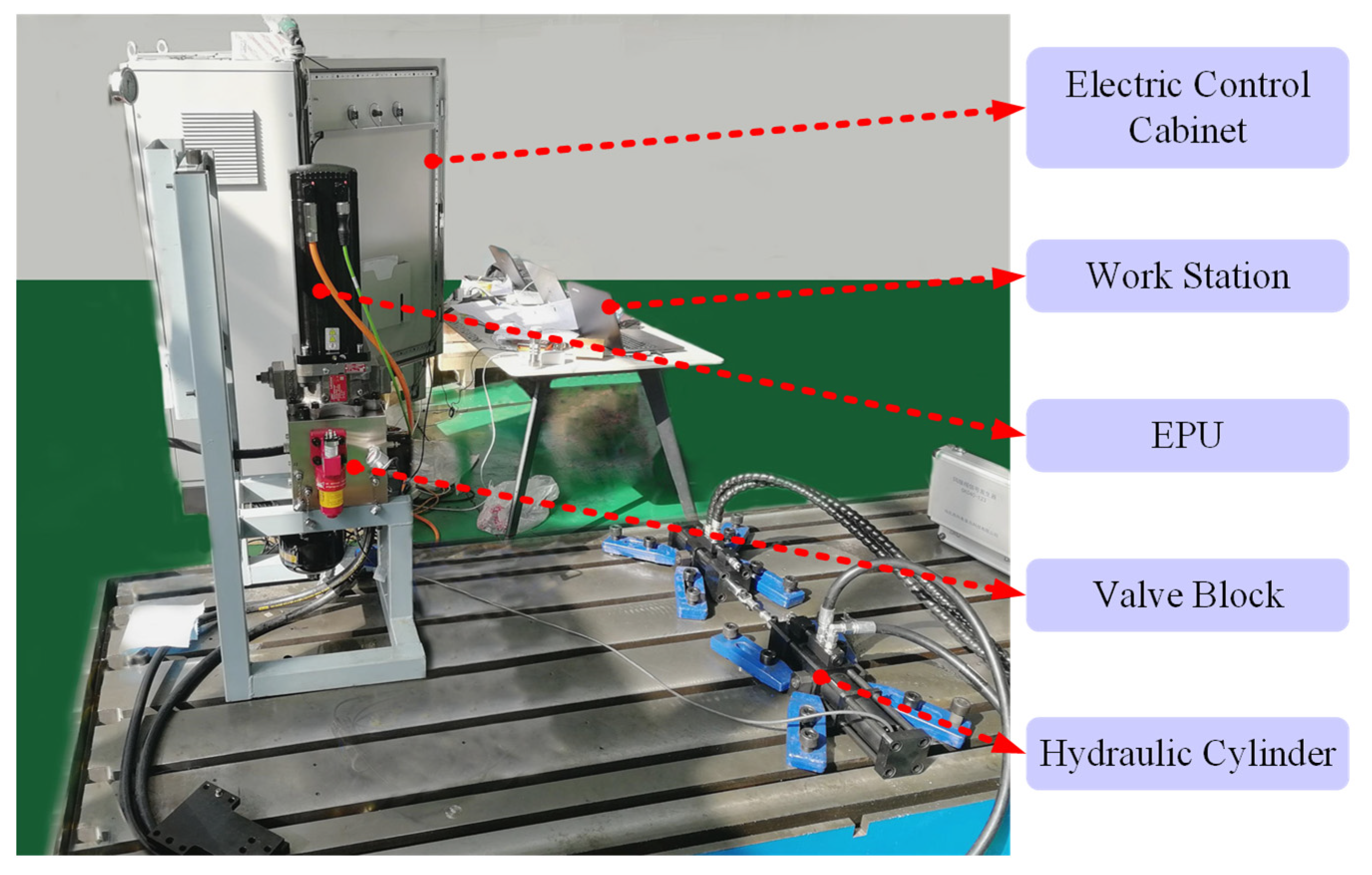
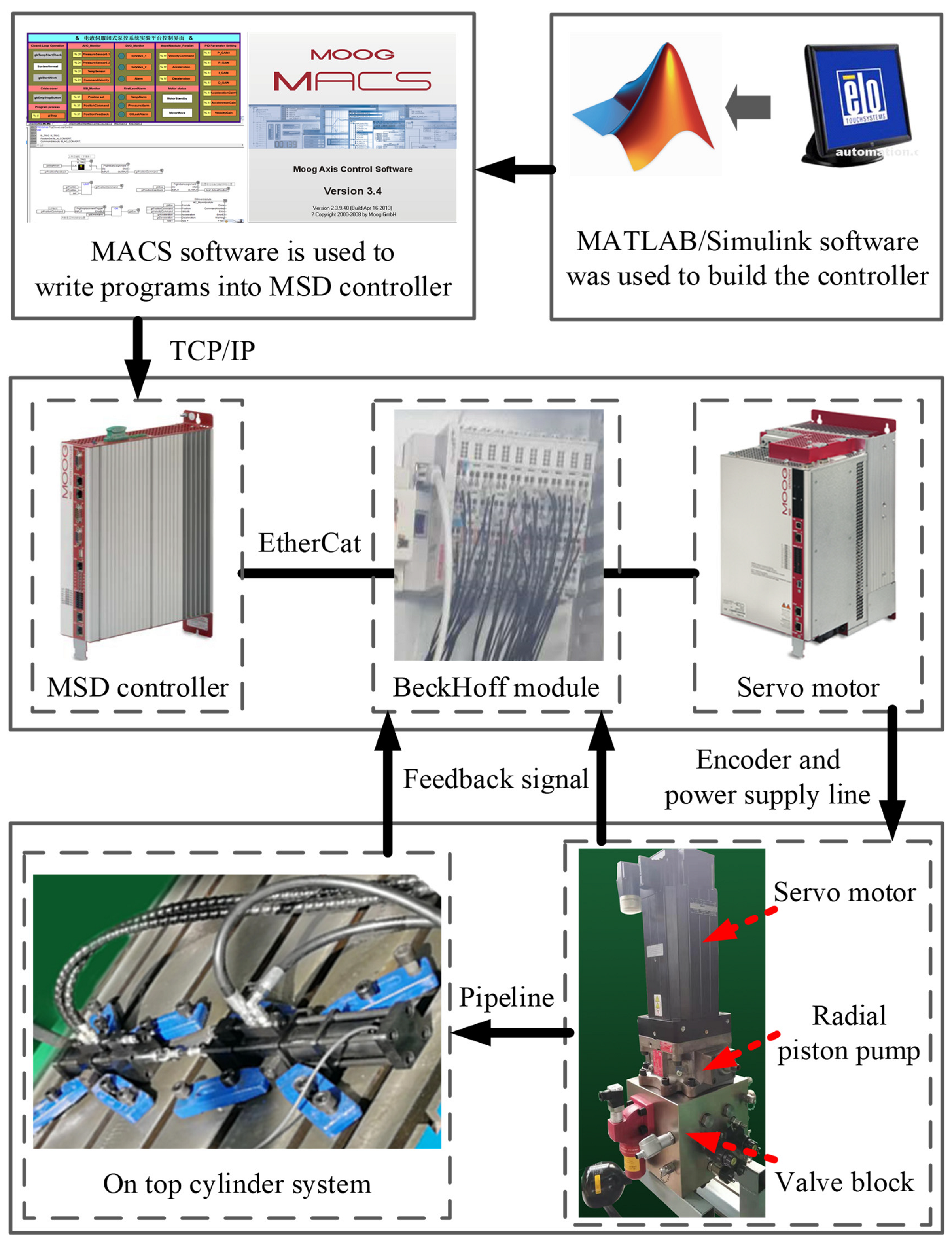
5.1. Experimental Platform
5.2. Experimental Analysis
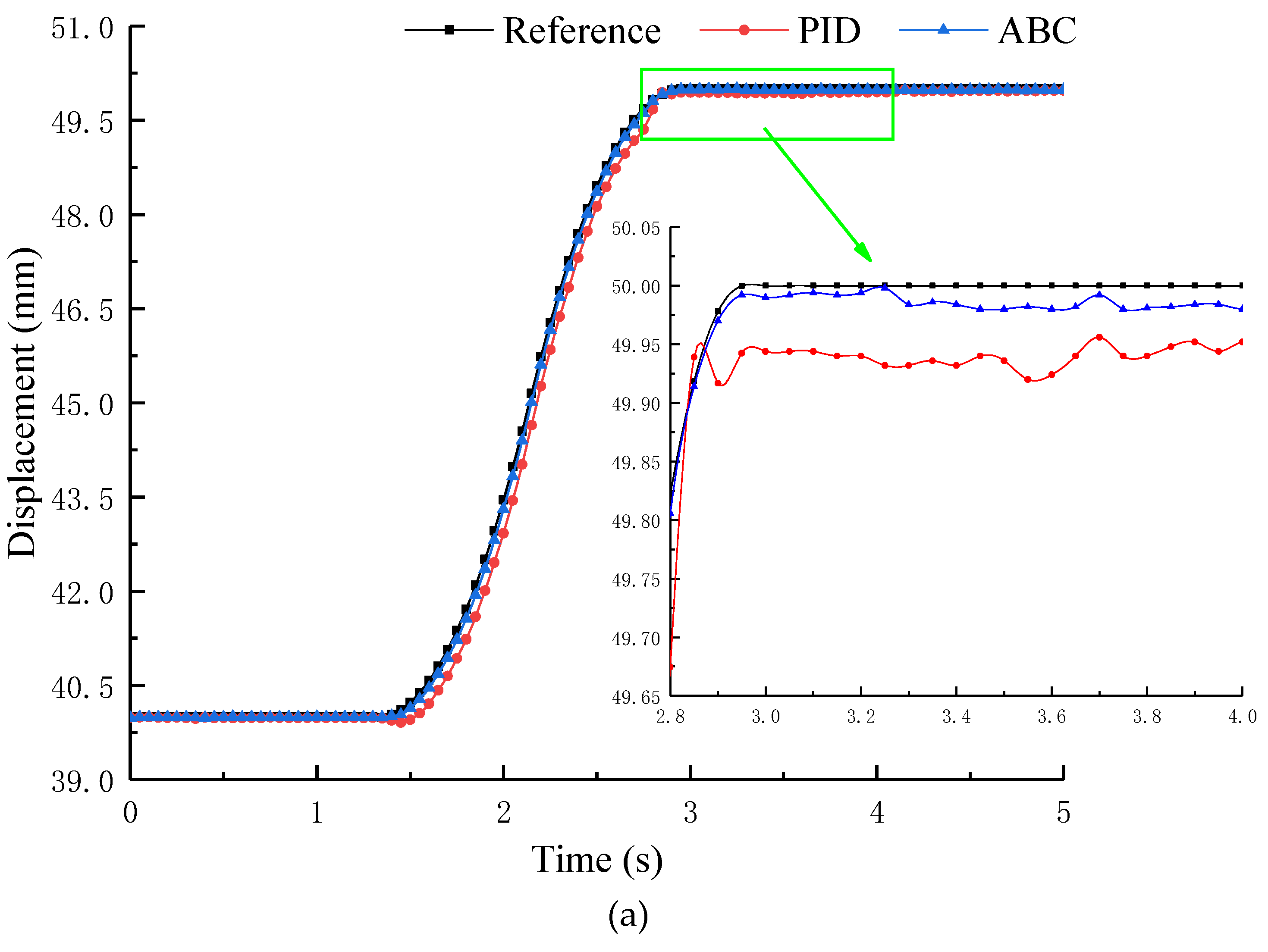
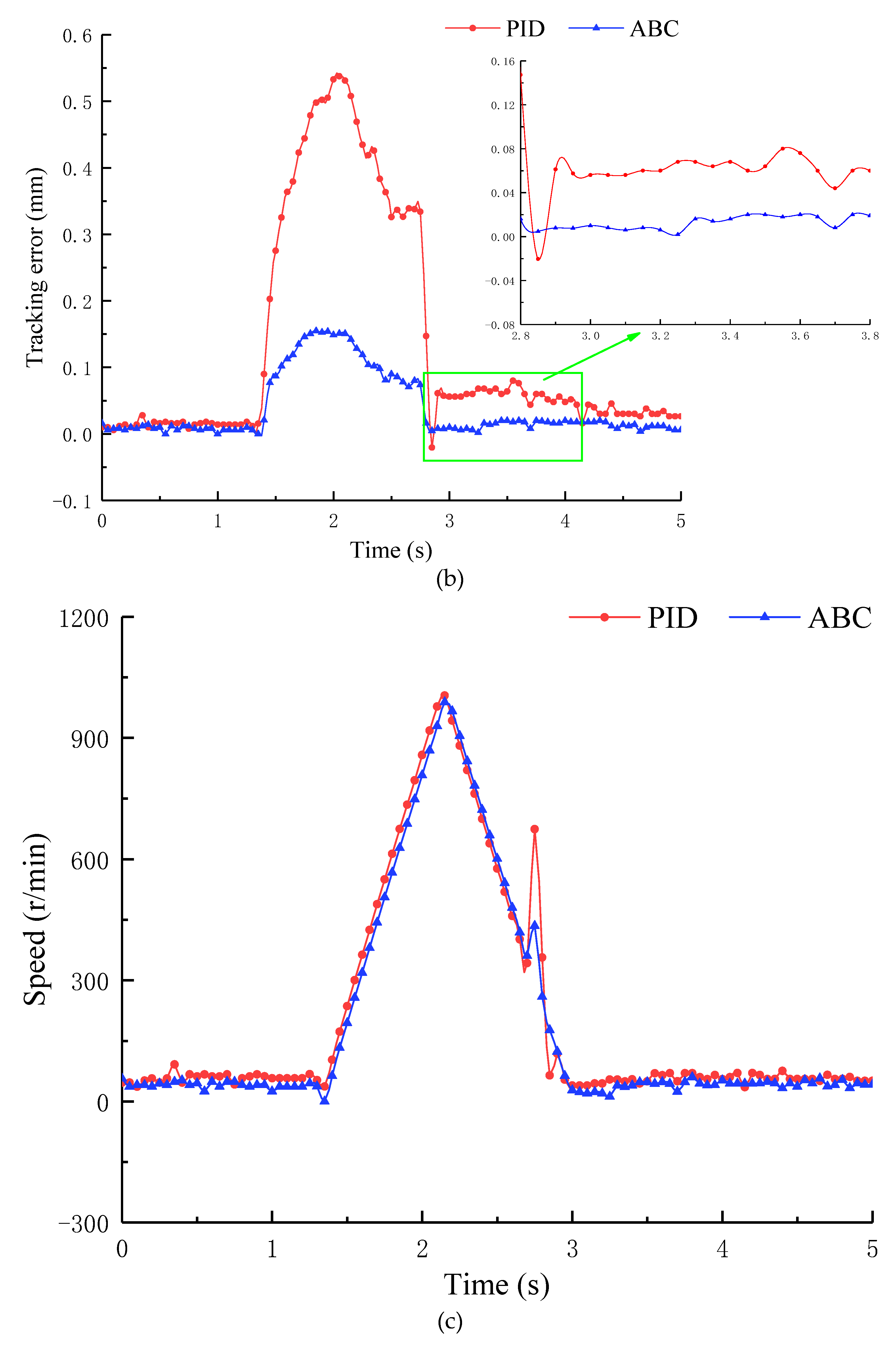
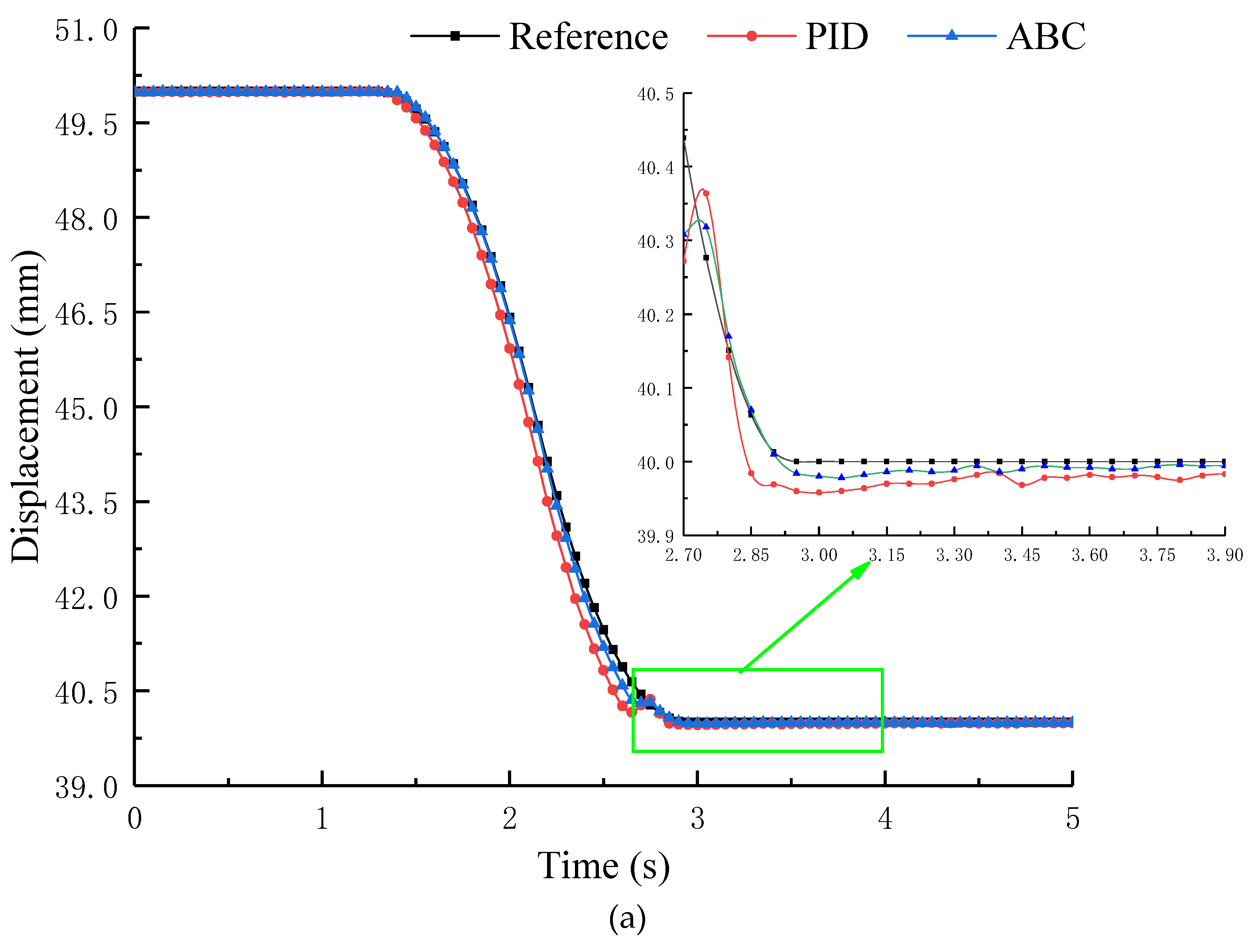
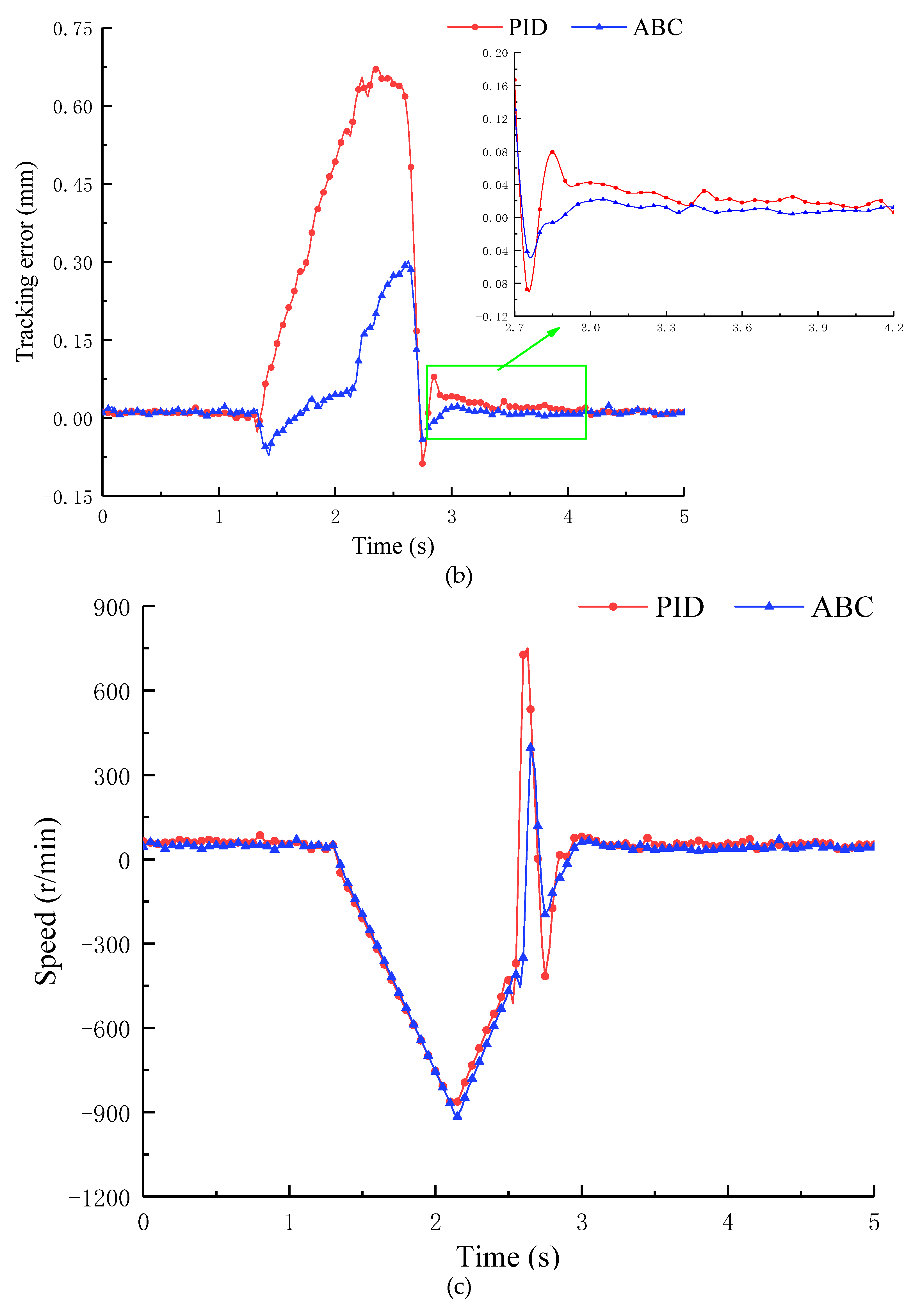
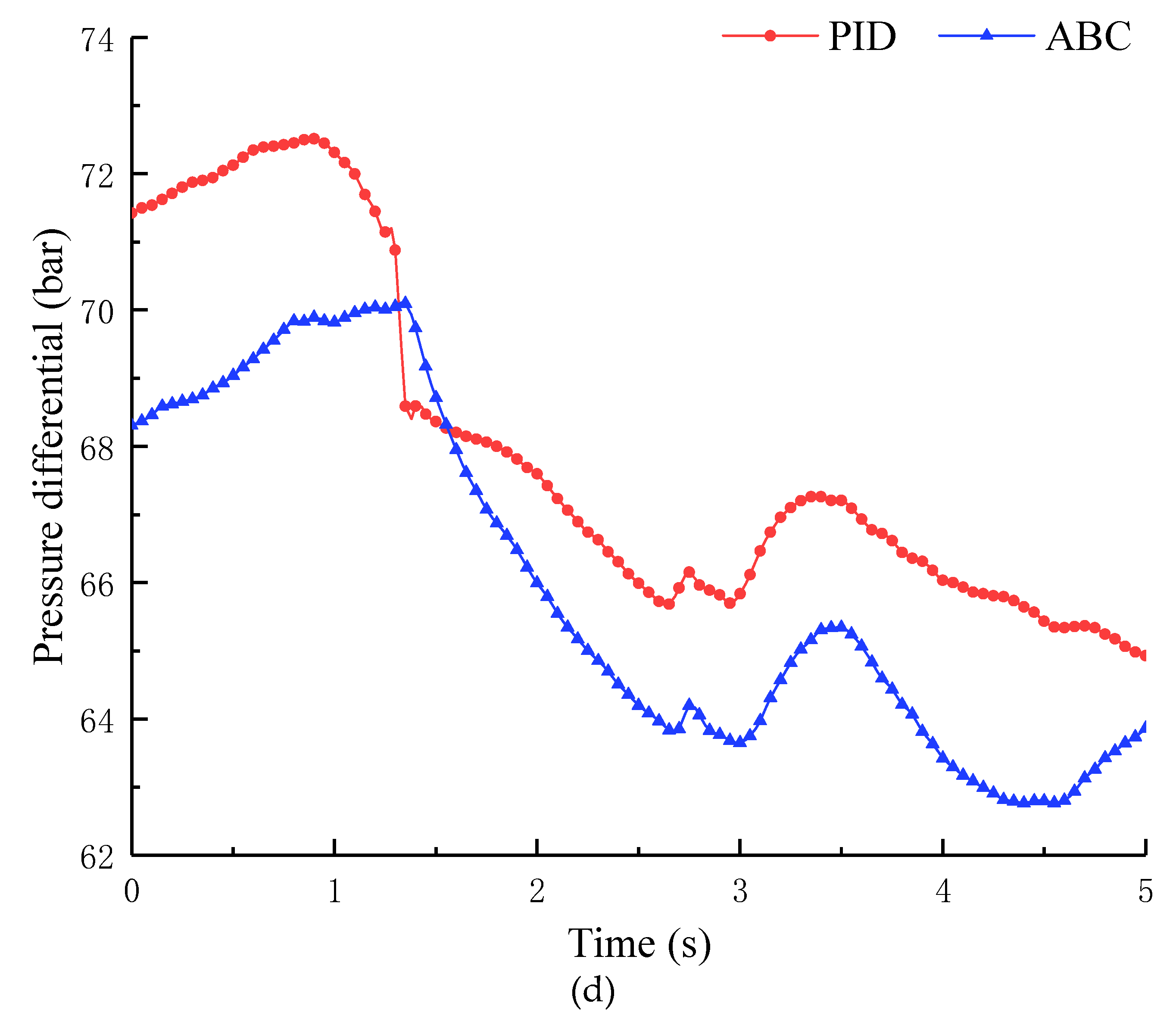
5.2.1. 10 mm “S” Ramp Signal
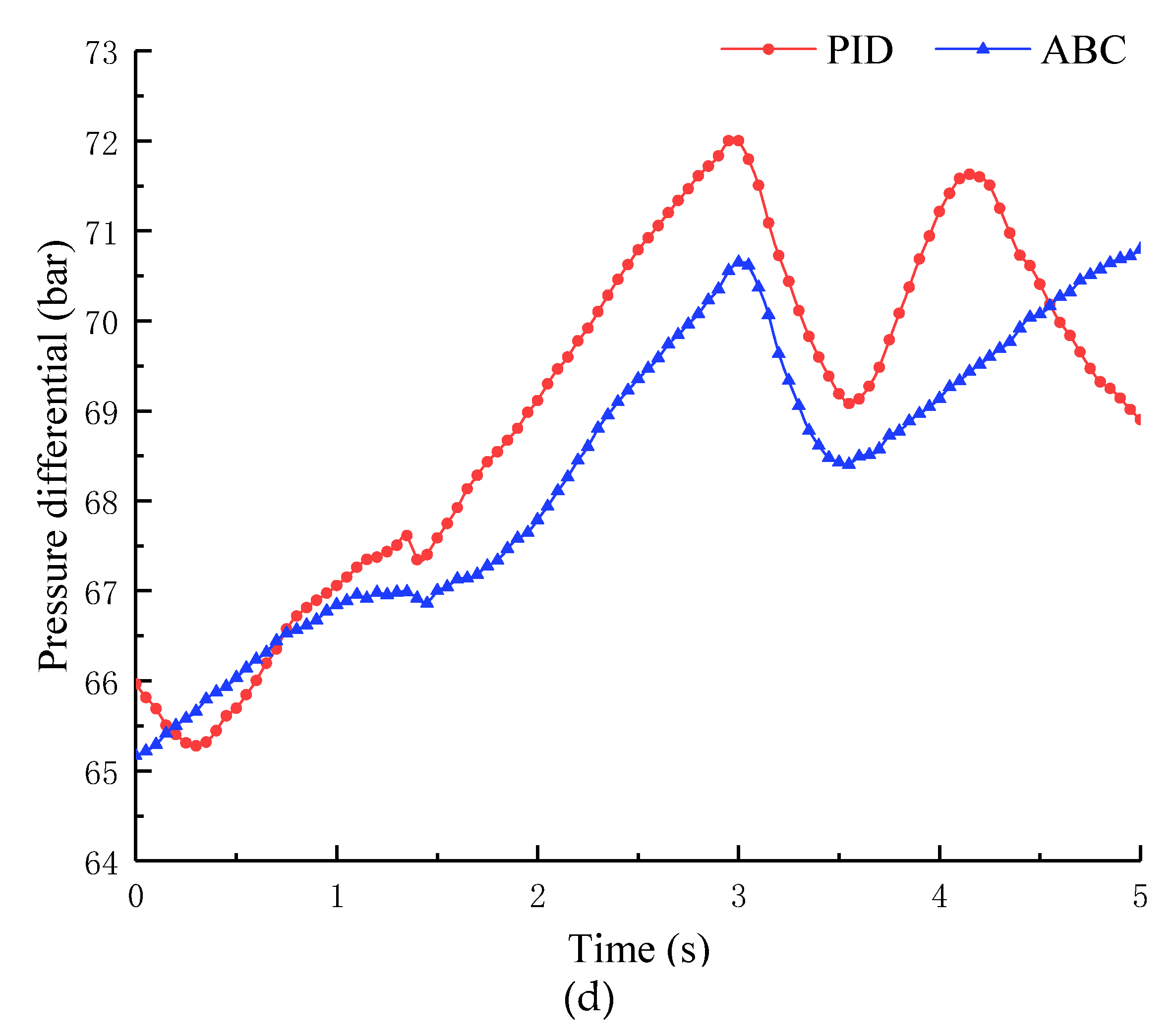
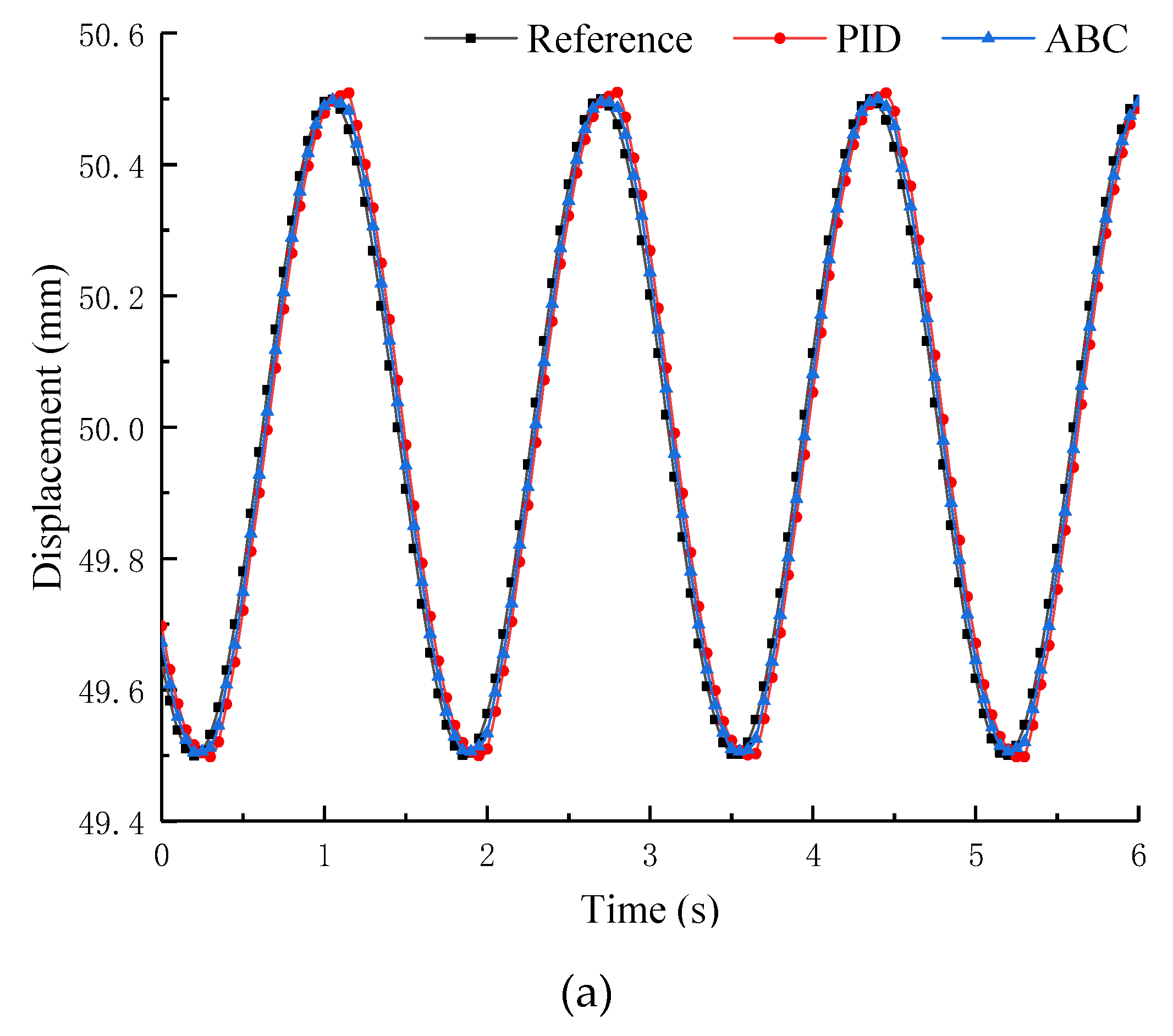
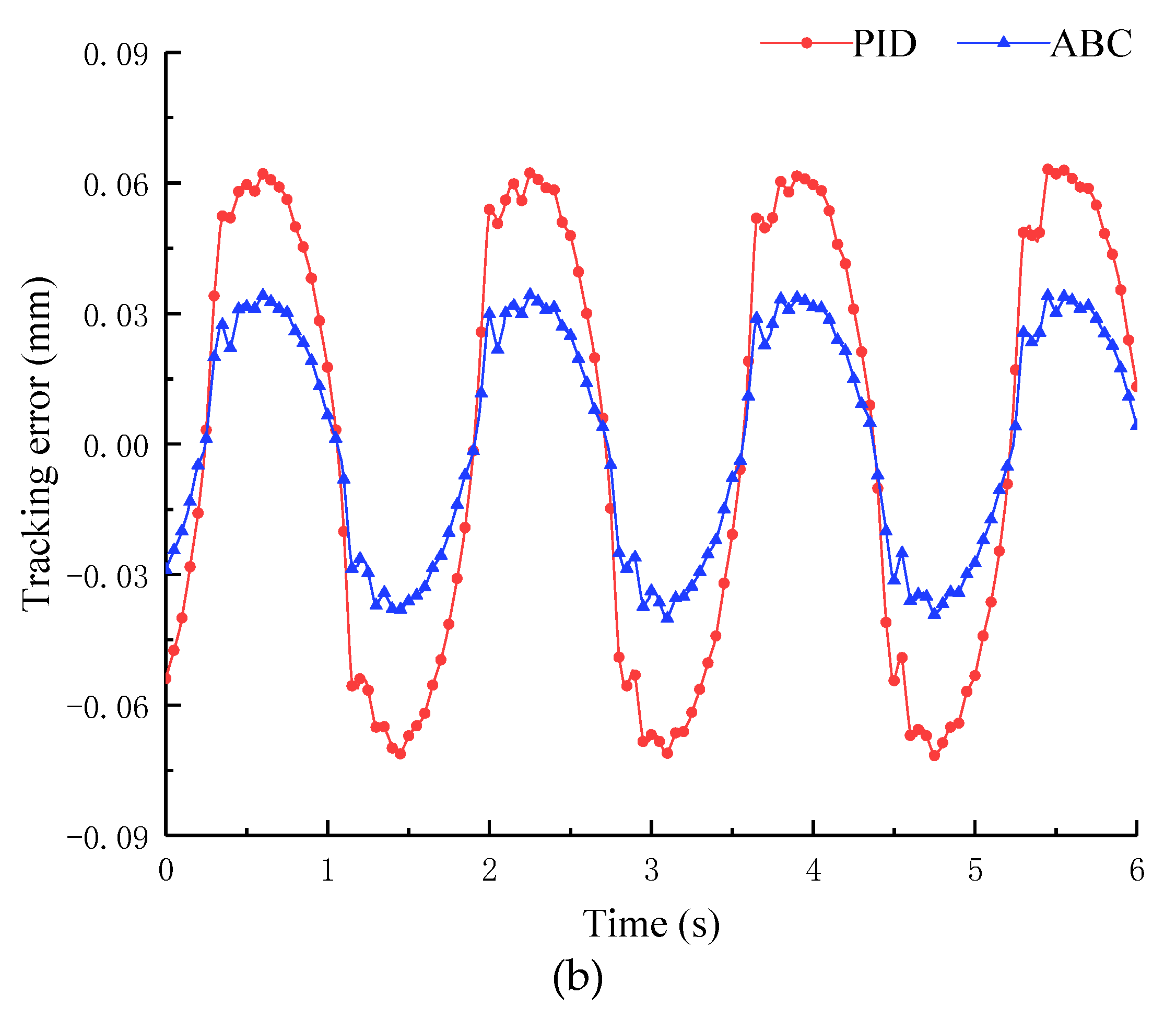
5.2.2. Sine Signal
6. Conclusions
- (1)
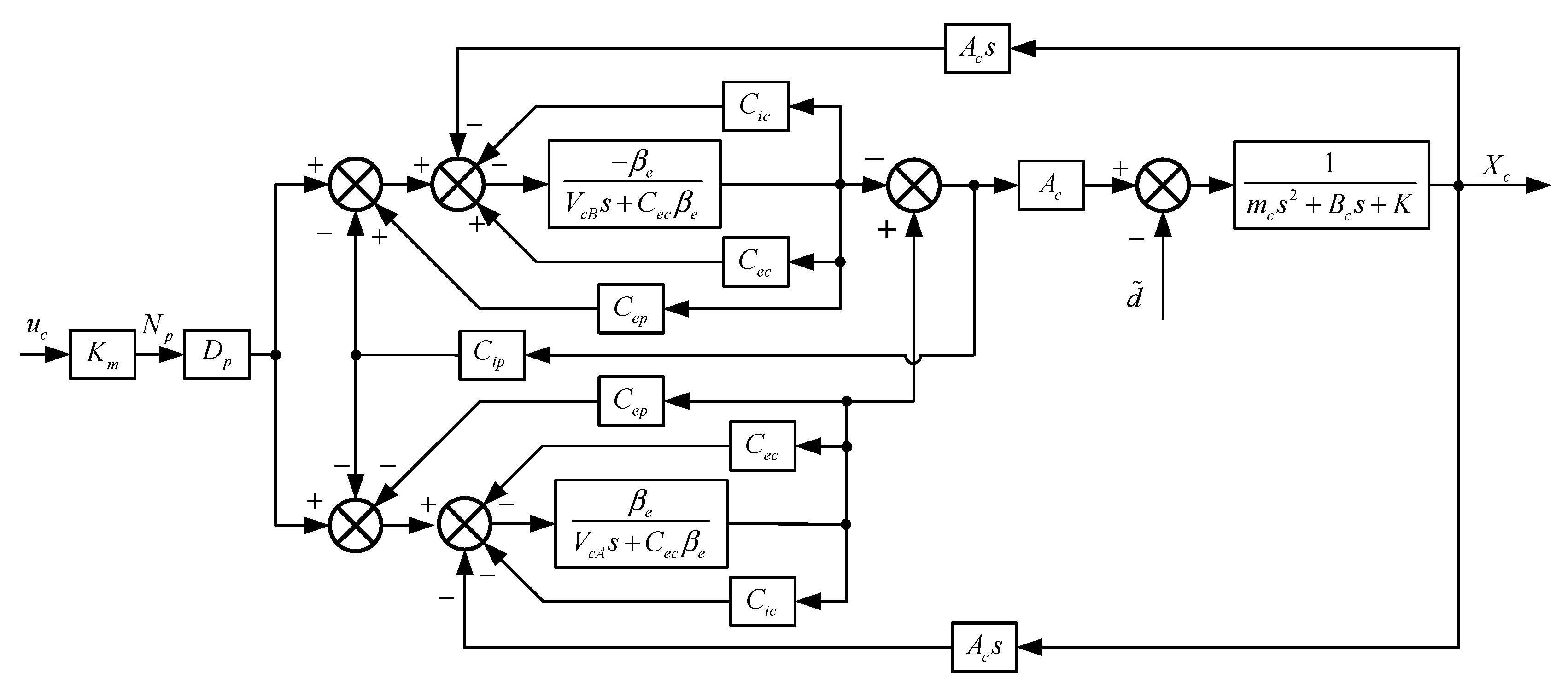
- The mathematical model of the electro-hydraulic servo pump control system was established, and the position output transfer function of the system was deduced.
- (2)
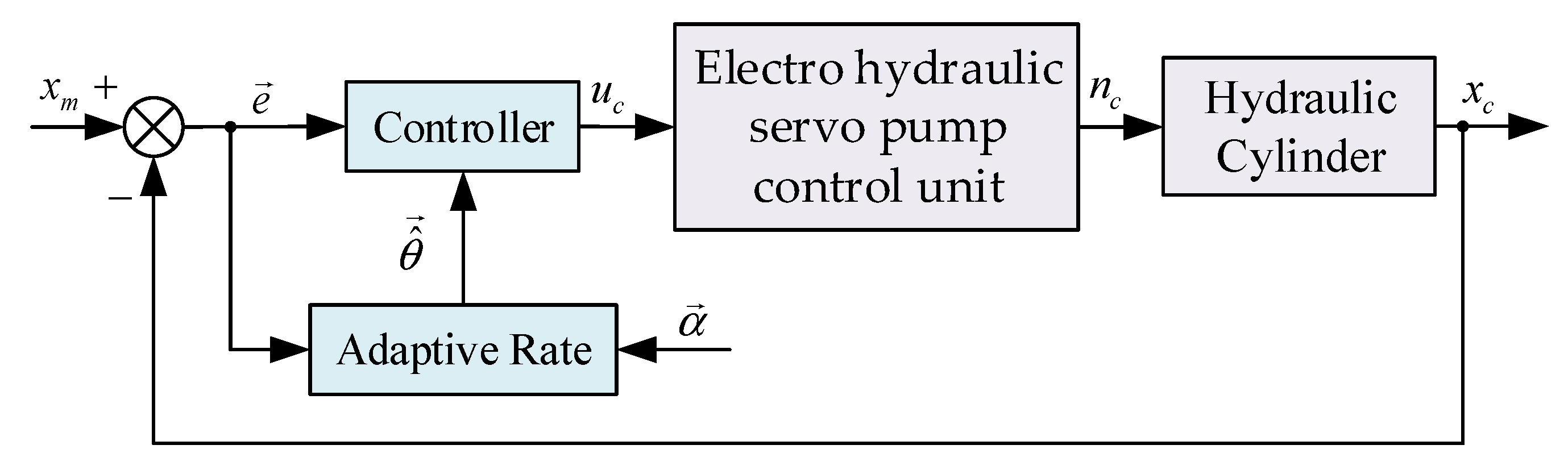
- An adaptive backstepping control strategy was proposed on the basis of the backstepping method. The algorithm fully considers the nonlinearity and parameter uncertainty of the pump control system. When the desired control input is obtained, the adaptive adjustment rate of the uncertain parameter is derived and applied to actual position control.
- (3)
- Experimental analysis showed that the adaptive backstepping control strategy proposed in this paper had good control performance in practical applications. Its steady-state control accuracy was able to reach ±0.02 mm, which can lay a certain foundation for high-precision position control of the pump control system. In addition, the system dead zone characteristics are also the main factors affecting the steady-state control. In order for the control accuracy of the system to be further improved, the pump control system dead zone characteristics can be further studied.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| DBS | direct backstepping controller |
| PID | proportional integral derivative controller |
| EPU | electro-hydraulic servo pump control unit |
| ABC | adaptive backstepping control algorithm |
References
- Yan, G.; Jin, Z. Research on position control of volume servo electro-hydraulic actuator. J. Xi’an Jiaotong Univ. 2021, 55, 94–100. [Google Scholar]
- Shao, X.; Zhang, Y.; Sun, G.; Xu, Y. Hydraulicrobot joint force compensation control. J. Electr. Mach. Control 2018, 22, 98. [Google Scholar]
- Sun, H.; Gao, Q.; Liu, G.; Hou, Y.; Tang, Q. A homologous balance and positioning servo system of fuzzy fractional order PID control. J. Fire Control Command Control 2017, 42, 61–65+71. [Google Scholar]
- Zuo, X.; Ruan, J.; Sun, J.; Li, S.; Liu, G. Stability analysis of two-dimensional electro-hydraulic servo valve based on extruded oil film theory. J. China Mech. Eng. 2017, 28, 537–543. [Google Scholar]
- Feng, L.; Yan, H. Nonlinear adaptive robust control of electro-hydraulic servo system. J. Appl. Sci. 2020, 10, 2265–2270. [Google Scholar] [CrossRef]
- Shen, G.; Zhu, Z.; Zhang, L.; Tang, Y.; Yang, C. Adaptive feed-forward compensation for hybrid control with acceleration time waveform replication on electro-hydraulic shaking table. J. Control Eng. Pract. 2013, 21, 1128–1142. [Google Scholar]
- Khalil, H.K. Nonlinear Systems; Prentice Hall: Upper Saddle River, NJ, US, 1996. [Google Scholar]
- Yao, J.; Jiao, Z.; Ma, D.; Yan, L. High-accuracy tracking control of hydraulic rotary actuators with modeling uncertainties. J. IEEE/ASME Trans. Mechatron. 2014, 19, 633–641. [Google Scholar] [CrossRef]
- Hao, Y.; Xia, L.; Ge, L.; Wang, X.; Quan, L. Research on position control characteristics of hybrid linear drive system. J. Trans. Chin. Soc. Agric. Mach. 2020, 51, 379–385. [Google Scholar]
- Maghareh, A.; Silva, C.E.; Dyke, S.J. Parametric model of servo-hydraulic actuator coupled with a nonlinear system: Experimental validation. J. Mech. Syst. Signal Process. 2018, 104, 663–672. [Google Scholar] [CrossRef]
- Jing, H.; Xu, H.; Jiang, J. Dynamic surface disturbance rejection control for electro-hydraulic load simulator. J. Mech. Syst. Signal Process. 2019, 134, 106293.1–106293.14. [Google Scholar] [CrossRef]
- Ba, D.X.; Ahn, K.K.; Truong, D.Q.; Park, H.G. Integrated model-based backstepping control for an electro-hydraulic system. J. Int. J. Precis. Eng. Manuf. 2016, 17, 565–577. [Google Scholar] [CrossRef]
- Huang, W.; Quan, L.; Cheng, H.; Ge, L.; Dong, Z. Velocity and position combined control of hydraulic excavator swing system based on handle integral. J. Beijing Inst. Technol. 2020, 40, 193–197. [Google Scholar]
- Guo, Q.; Zhao, D.; Zhao, X.; Li, Z.; Wu, L. Internal model control in position control of active suspension electro-hydraulic servo actuator. J. Trans. Chin. Soc. Agric. Mach. 2020, 51, 394–404. [Google Scholar]
- Guo, P.; Li, Y.; Li, J.; Zhang, B.; Wu, X. Design of primary mirror position control system for large aperture telescope. J. Acta Opt. Sin. 2020, 40, 122–128. [Google Scholar]
- Sani, S.; Chaji, A. Output feedback nonlinear control of double-rod hydraulic actuator using extended Kalman filter. In Proceedings of the IEEE 4th International Conference on Knowledge-Based Engineering and Innovation (KBEI), Tehran, Iran, 22–22 December 2017; pp. 0349–0354. [Google Scholar]
- Zad, H.S.; Ulasyar, A.; Zohaib, A. Robust Model Predictive position Control of direct drive electro-hydraulic servo system. In Proceedings of the 2016 International Conference on Intelligent Systems Engineering (ICISE), Islamabad, Pakistan, 15–17 January 2016. [Google Scholar]
- Shi, G.; Zhou, Q.; Wang, S.; Ju, C. High robust control strategy for electro-hydraulic composite steering system in unpilotless mode. J. Trans. Chin. Soc. Agric. Mach. 2019, 50, 395–402. [Google Scholar]
- Ji, X.; Wang, C.; Chen, S.; Zhang, Z. Sliding mode backstepping control method for valve-controlled electro-hydraulic Position Servo System. J. Cent. South Univ. (Sci. Technol.) 2020, 51, 1518–1525. [Google Scholar]
- Jia, C.; Wei, J.; Dong, E.; Gao, X.; He, H. A discrete-time sliding mode control method for multi-cylinder hydraulic press. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 13–16 October 2020; pp. 204–205. [Google Scholar]
- Ji, X.; Wang, C.; Zhang, Z.; Chen, S.; Guo, X. Nonlinear adaptive position control of hydraulic servo system based on sliding mode back-stepping design method. J. Proc. Inst. Mech. Eng. 2021, 235, 0349–0354. [Google Scholar] [CrossRef]
- Guo, X.; Wang, C.; Liu, H.; Zhang, Z.; Ji, X. Sliding mode control of pump-controlled electro-hydraulic servo system based on extended state observer. J. Beijing Univ. Aeronaut. Astronsutics 2020, 46, 1159–1168. [Google Scholar]
- Han, S.; Jiao, Z.; Wang, C.; Shang, Y.; Shi, Y. Fractional integral sliding mode nonlinear control of electro-hydraulic flight turntable. J. Beijing Univ. Aeronaut. Astronautics 2014, 40, 1411–1416. [Google Scholar]
- Shang, X.; Zhou, H.; Yang, H. Research Status of Active Control Method for Fluid Pulsation in Hydraulic System. J. Mech. Eng. 2019, 55, 216–226. [Google Scholar]
- Helian, B.; Chen, Z.; Yao, B.; Lyu, L.; Li, C. Accurate Motion Control of a Direct-drive Hydraulic System with an Adaptive Nonlinear Pump Flow Compensation. J. IEEE/ASME Trans. Mechatron. 2020, 26, 2593–2603. [Google Scholar] [CrossRef]
- Tri, N.M.; Nam, D.N.C.; Park, H.G.; Ahn, K.K. Trajectory control of an electro hydraulic actuator using an iterative backstepping control scheme. J. Mechatron. 2015, 29, 96–102. [Google Scholar] [CrossRef]
- Yin, X.; Zhang, W.; Jiang, Z.; Pan, L. Adaptive robust integral sliding mode pitch angle control of an electro-hydraulic servo pitch system for wind turbine. J. Mech. Syst. Signal Process. 2019, 133, 105704. [Google Scholar] [CrossRef]
- Liem, D.T.; Truong, D.Q.; Park, H.G.; Ahn, K.K. A Feedforward Neural Network Fuzzy Grey Predictor-based Controller for Force Control of an Electro-hydraulic Actuator. J. Int. J. Precis. Eng. Manuf. 2016, 17, 309–321. [Google Scholar] [CrossRef]
- Zhu, Y.; Sun, Y.; Chen, G. Simulation Research on Hydraulic Loading System of Wind Turbine Based on Particle Swarm PID Control. In Proceedings of the IEEE Conference on Telecommunications, Optics and Computer Science (TOCS), Shenyang, China, 11–13 December 2020; pp. 385–388. [Google Scholar]
- Lin, H.; Li, E.; Liang, Z. Adaptive backstepping controller for electro-hydraulic servo system with nonlinear uncertain parameters. J. Control Theory Appl. 2016, 33, 181–188. [Google Scholar]
- Kaddissi, C.; Kenne, J.P.; Saad, M. Indirect Adaptive Control of an Electrohydraulic Servo System Based on Nonlinear Backstepping. J. IEEE/ASME Trans. Mechatron. 2011, 16, 1171–1177. [Google Scholar] [CrossRef]
- Do, H.M.; Basar, T.; Choi, J.Y. An anti-windup design for single input adaptive control systems in strict feedback form. In Proceedings of the 2004 American Control Conference, Boston, MA, USA, 30 June–2 July 2004; pp. 2551–2556. [Google Scholar]
- Guan, C.; Pan, S. Nonlinear adaptive robust control of singlerod electrohydraulic actuator with unknown nonlinear parameters. J. IEEE Trans. Control Syst. Technol. 2008, 16, 434–445. [Google Scholar] [CrossRef]
- Yao, J.; Deng, W.; Sun, W. Precision Motion Control for Electro-Hydraulic Servo Systems with Noise Alleviation: A Desired Compensation Adaptive Approach. J. IEEE/ASME Trans. Mechatron. 2017, 22, 1859–1868. [Google Scholar] [CrossRef]
- Wang, C. Hydraulic Control System; Mechanical Industry Press: Beijing, China, 2012; pp. 41–42. [Google Scholar]
- Zheng, J.; Yao, J. Robust adaptive tracking control of hydraulic actuators with unmodeled dynamics. J. Trans. Inst. Meas. Contro. 2019, 41, 3887–3898. [Google Scholar] [CrossRef]
- Chen, G.; Liu, H.; Zhao, P.; Yan, G.; Ai, C. Research on Experimental Platform of Electro-hydraulic Servo Closed Pump Control System. J. Mech. Electr. Eng. 2021, 38, 363–367. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Units | Value |
|---|---|---|---|
| Total compression volume | 4.15 × 10−2 | ||
| Efficient working area cylinder | 7.9 × 10−4 | ||
| Total mass converted from the load to the piston | 150 | ||
| Viscous damping coefficient | 0.0345 | ||
| Equivalent spring stiffness of the load | 5 × 107 | ||
| Total leakage coefficient of hydraulic system | 9 × 10−11 | ||
| Effective volume modulus of oil | 7 × 108 | ||
| Control gain | 300 | ||
| Displacement of fixed displacement pump | 8 × 10−6 | ||
| External disturbance and unmodeled friction | 1.5 × 104 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, G.; Liu, H.; Jia, P.; Qiu, G.; Yu, H.; Yan, G.; Ai, C.; Zhang, J. Position Output Adaptive Backstepping Control of Electro-Hydraulic Servo Closed-Pump Control System. Processes 2021, 9, 2209. https://doi.org/10.3390/pr9122209
Chen G, Liu H, Jia P, Qiu G, Yu H, Yan G, Ai C, Zhang J. Position Output Adaptive Backstepping Control of Electro-Hydraulic Servo Closed-Pump Control System. Processes. 2021; 9(12):2209. https://doi.org/10.3390/pr9122209
Chicago/Turabian StyleChen, Gexin, Huilong Liu, Pengshuo Jia, Gengting Qiu, Haohui Yu, Guishan Yan, Chao Ai, and Jin Zhang. 2021. "Position Output Adaptive Backstepping Control of Electro-Hydraulic Servo Closed-Pump Control System" Processes 9, no. 12: 2209. https://doi.org/10.3390/pr9122209