
An Effective Communication Prototype for Time-Critical IIoT Manufacturing Factories Using Zero-Loss Redundancy Protocols, Time-Sensitive Networking, and Edge-Computing in an Industry 4.0 Environment


Abstract
:1. Introduction
1.1. Motivation of the Study
1.2. Contribution, Assumptions and Limitations of the Study
- Two zero-loss redundancy protocols operation principle: PRP, suitable for protection against multiple points of failures, and HSR to palliate to IP-based IIoT networks’ unforeseen link failures, therefore reducing the risks of communication delays and downtimes.
- TSN and edge computing concepts benefits to diminish communication latency risks when dealing with critical data transmission.
- All network components (switches) are TSN-capable devices.
- We assume that inter-domain transmissions for the edge computing are done in the background.
- Our research intends to develop experimental industrial network communication prototypes solely built on theoretical concepts such as TSN, edge computing, and zero-loss redundancy protocols. We do not conduct deep simulations on these technologies but incorporate their benefits to design a robust and reliable industrial communication network. Our communication prototypes are helpful to plan robust network design before the actual deployment on physical network devices. The concept of TSN is currently not finalized yet. Deep tests on this technology should happen once completed.
- Our research only focuses on IP-based industrial networks communication.
- Our research is limited to intra-domain transmission.
1.3. Previous Works Gaps Summary
2. Background and Theory
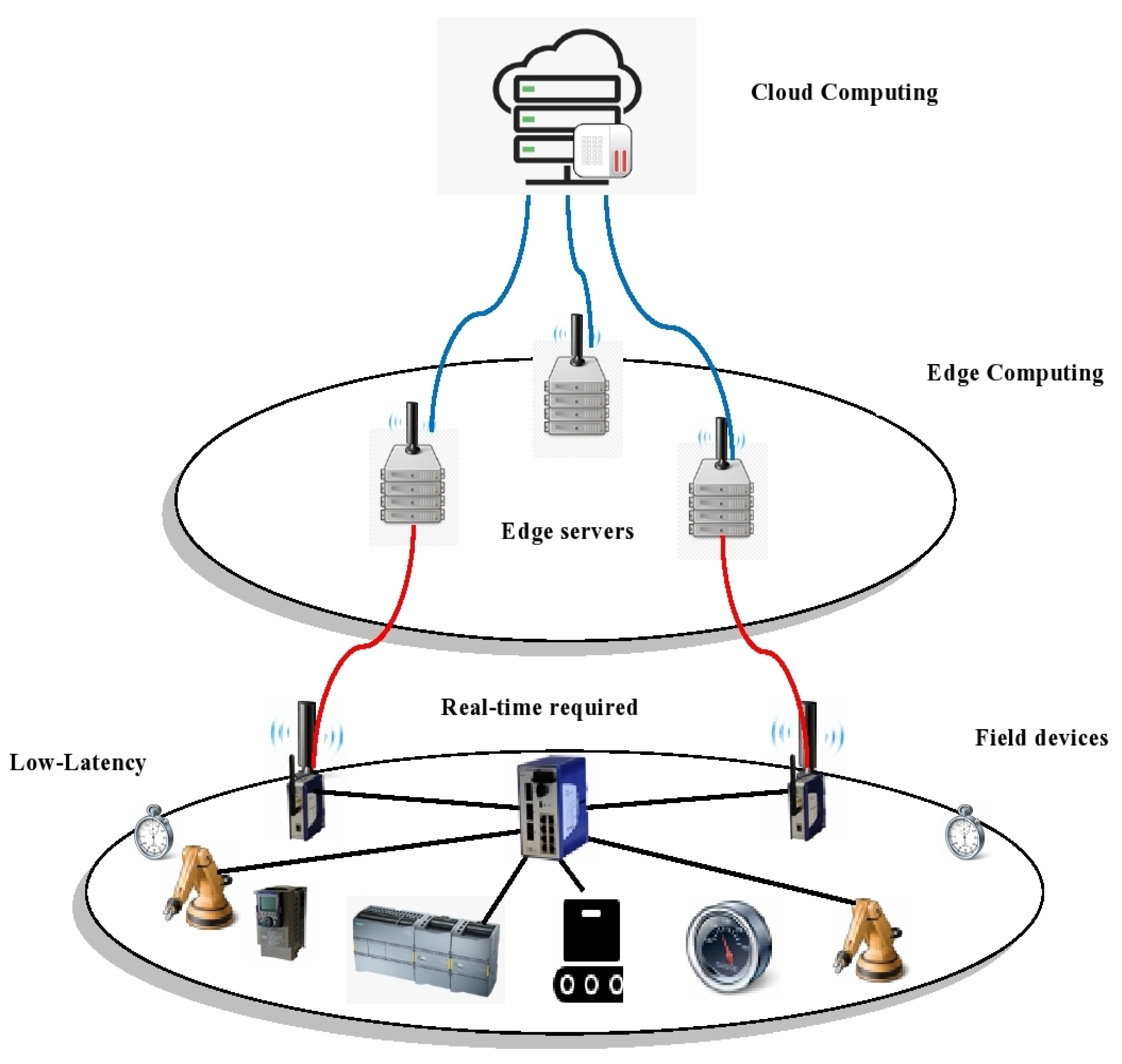
2.1. Edge Computing
- Big IIoT data: IIoT devices create massive data which are collected, processed, and stored in the smart factory network. These data can be directly collected from an MTD or an IIoT device; in this case, they are called raw data. Other data present in the network are the raw data processing product to make production processes decisions, take actions, and send information back to IIoT devices.
- Ultra-low-latency response: Most IIoT applications require real-time responses and extreme low-latency for precise decision-making from continuously monitoring IIoT devices data. Individual MTDs and IIoT devices are unable to achieve, on their own, the analysis and the processing of all smart factory data at ultra-low latency.
- Reliable medium: The data processing and collection in an IIoT environment needs to be continuous and uninterrupted to ensure that the production processes deliver excellent results in terms of quality and quantity. Therefore, it is imperative to have a reliable medium through which data is transmitted and processed without unnecessary failure.
2.2. Ethernet and Switches
- The preamble is the first section of the Ethernet frame that synchronizes the recipient of the Ethernet frame. It is usually a sequence of ‘1 s’ and ‘0 s’ in 7 bytes.
- The Start of Frame Delimiter (SFD): This section marks the beginning of a frame as a sequence of ‘1 s’ and ‘0 s’ bits in 1 byte.
- The Destination and The Source address: These two sections save the physical or MAC (media access control) address of each end-device from which and to which the frame is going.
- The type: This section is only available in Ethernet V2.0 frames and indicates the protocol used in the Ethernet frame: IP or UDP.
- The Length: This part is only available in Ethernet IEEE 802.3 frame and indicates the size of the data field.
- The protocol data unit (PDU): This section contains the data is transmitted from one node to another.
- The Frame Checking Sequence (FCS): This part offers a checksum to check errors in the Ethernet frame. Its size is 4 bytes.
- The Inter Frame Gap (IFG): This is a 12 bytes section to mark the minimum space between two frames following each other.
- Assuming that, in a network with two switches only, a frame travels directly from a switch to another without waiting in the source switch memory, we present a mathematical expression for the minimum communication frame delay aswhere is the frame processing delay from the source node or switch; is the processing delay at the destination node; is the delay generated by the frame transmission. We defined in (5). is the delay issued by the electrical signal traveling through the physical medium (the copper cable or the fiber cable for long distances). At a worst-case scenario, frames are assumed to be transmitted at about the speed of light via a cable. We consider that the length of cables used between the transmitting node and the two switches is the same. The worst-case delay of is therefore approximated to about 5 µs per kilometer or 0.1 µs for 20 m.where is the size of the transmitted frame in bits and x is the data rate in bits per seconds.
- Assuming that the frame will be stored for few times in one of the switches before the transmission to the end-point, the frame communication delay can be expressed aswhere is the number of frames waiting in the switch memory, IFG is the inter frame gap, is the data size of the frame in the queue, represents the overhead of the frame and x is the data transmission rate in bits per seconds.The above delay calculations are only applicable for the store and forward switching method that considers the overall size of the frame before its transmission unlike other technologies such as cut-through. As per Gutiérrez C.S.V. et al. (2018) [51], a simplified expression of the delay from an end-point Y to another end-point Z in a network with k number of switches is presented in (8).where is delay to transmit all frames into the link, is the delay a frame encounters to travel on each link based on the data rate of the link, and is the processing delay for a frame to be forwarded from a switch ingress port to its egress port.
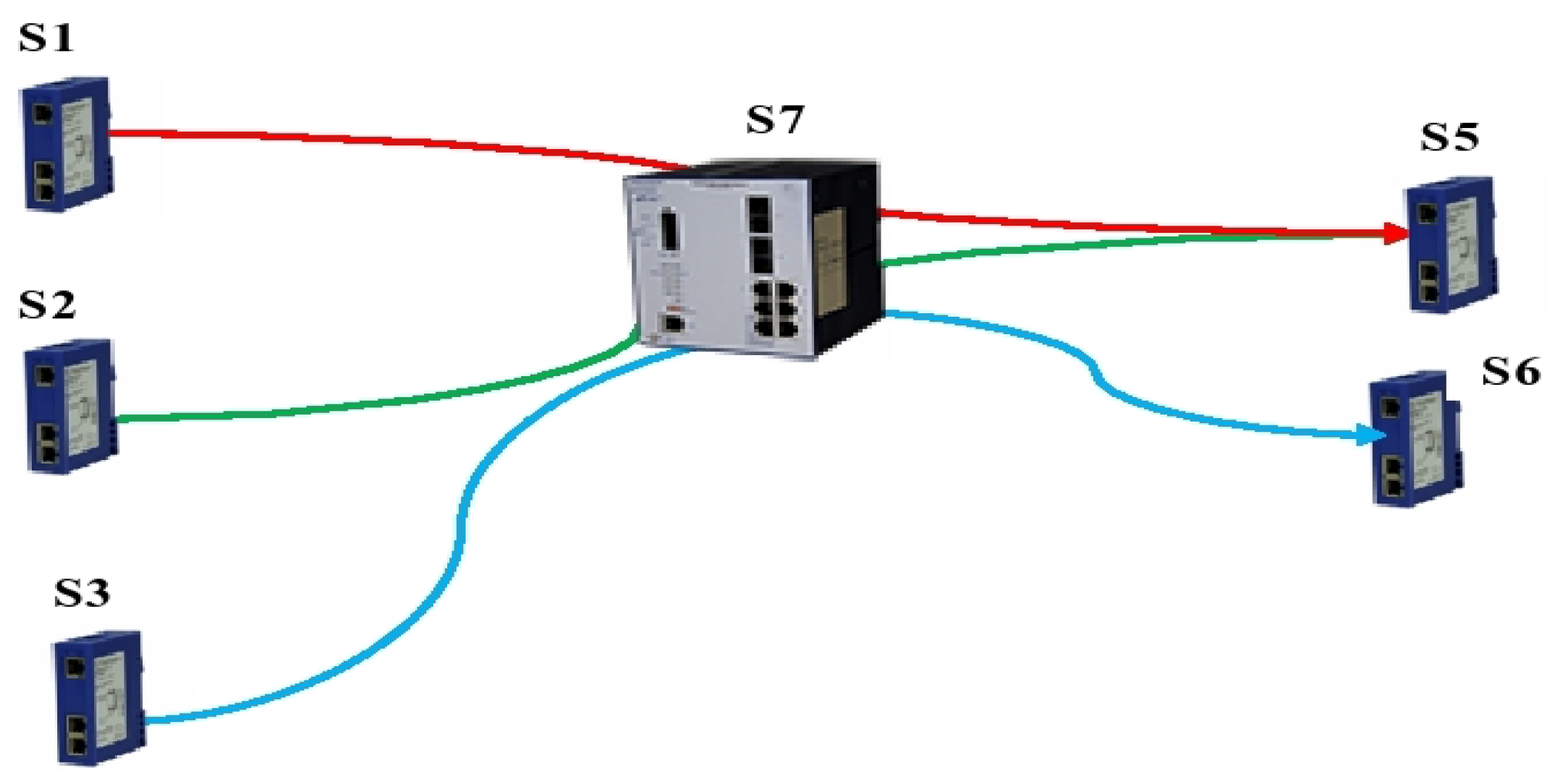
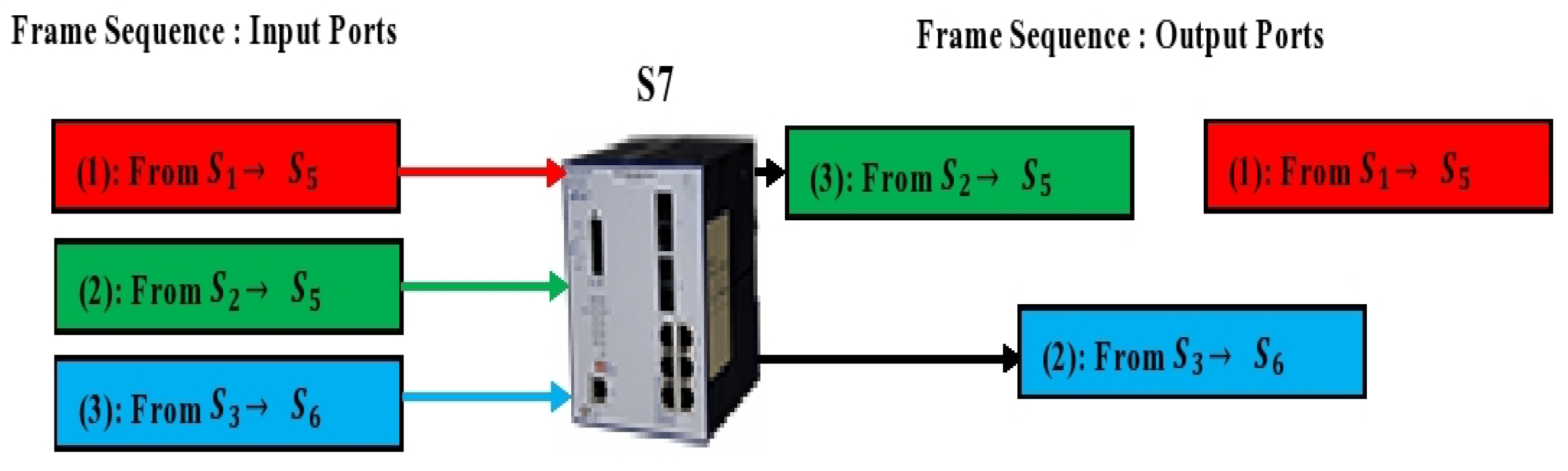
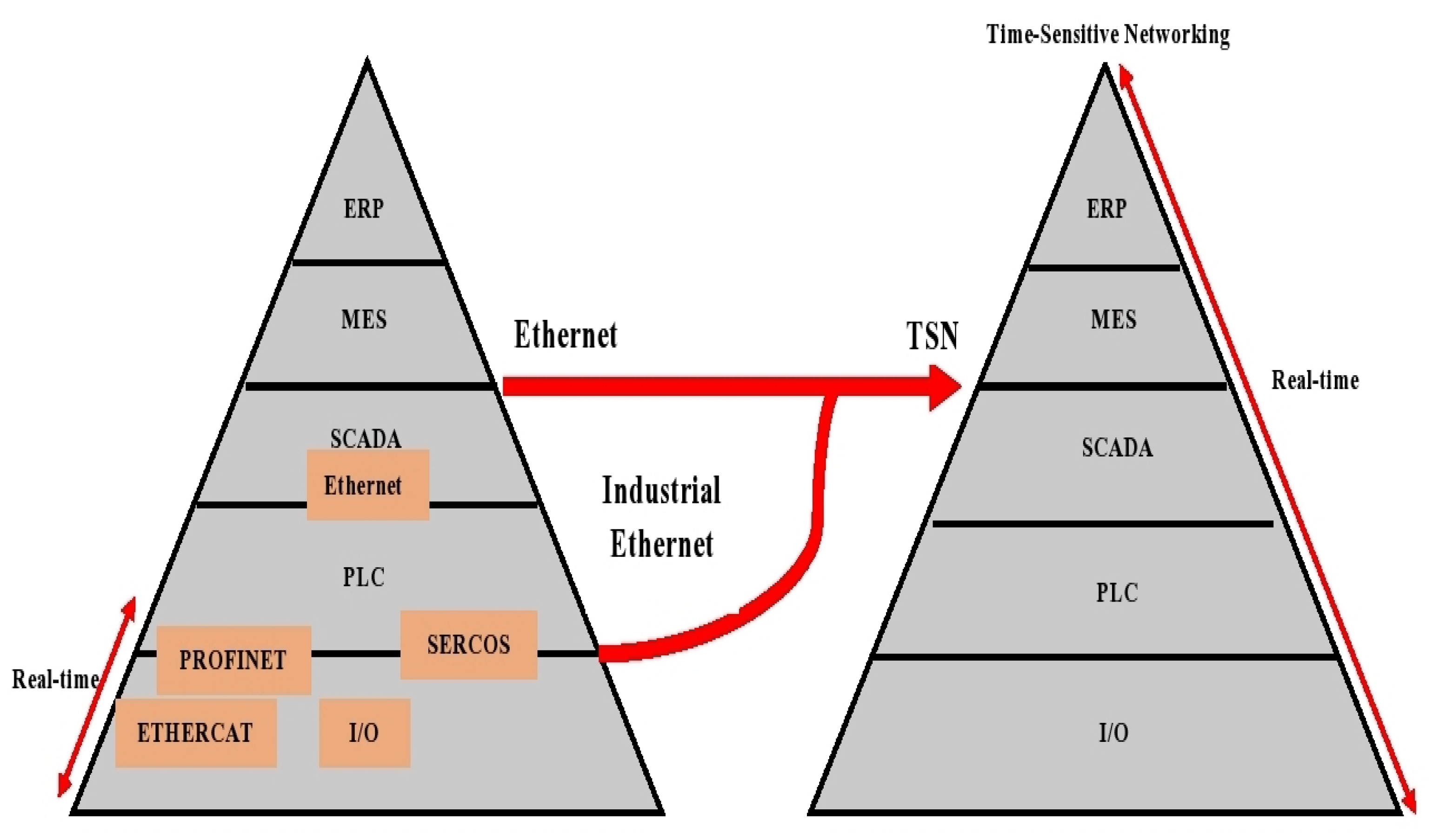
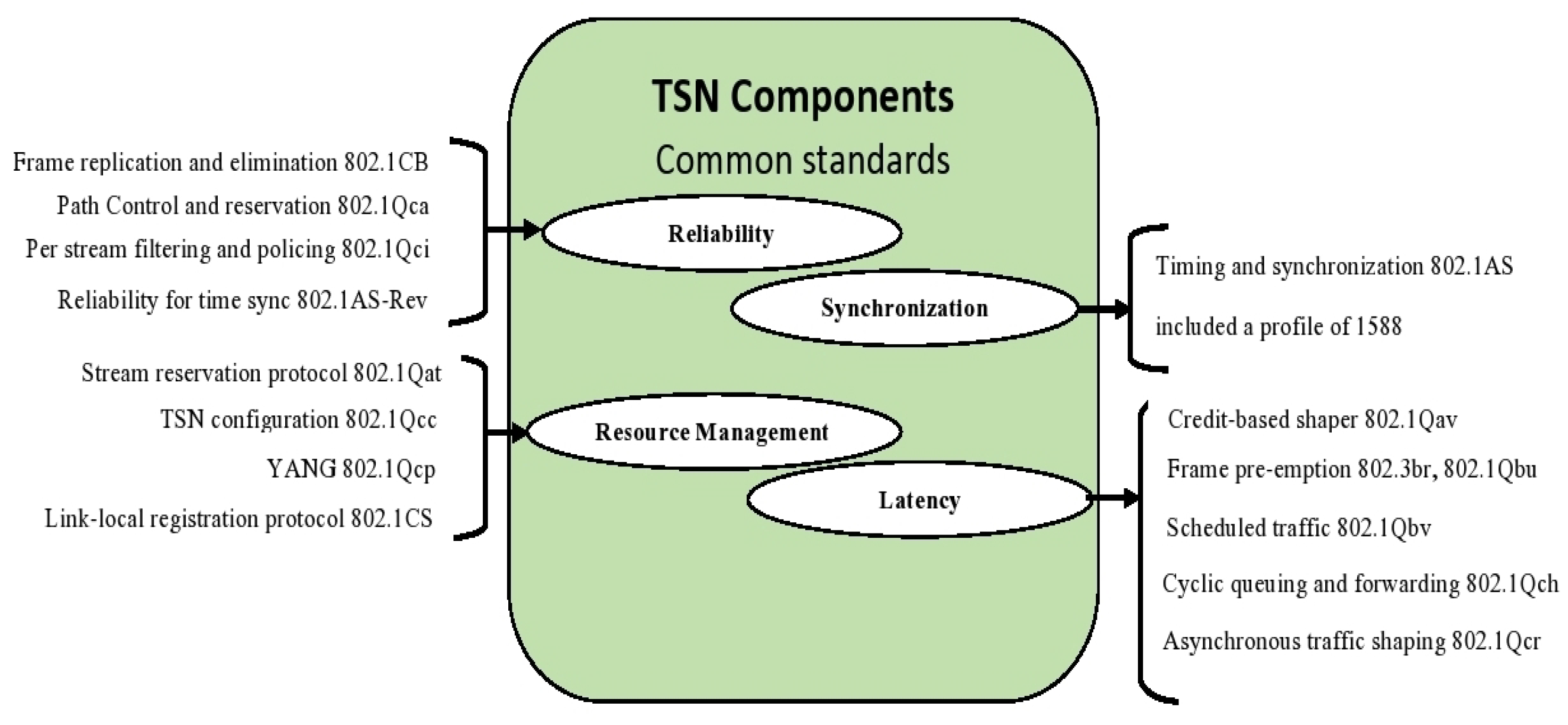
2.3. Time-Sensitive Networking (TSN)
- Time Synchronization: It is a crucial feature of TSN networks as it allows devices, by clock synchronization, to consistently exchange data at specific time slots.
- Scheduling and Traffic Shaping: This feature enables different traffic classes and types to operate in one network. The classes have individual bandwidth requirements, priorities, and delays.
- Stream Management and Fault Tolerance: This feature is about registering, identifying, and managing data paths before the communication begins. It allows us to keep a close look into each communication stream’s time accuracy and conduct [57].

2.4. Network Redundancy
- A bus or line topology: In this network topology, network devices like switches are connected one after another in a line. Figure 8 is an illustration of the bus topology.
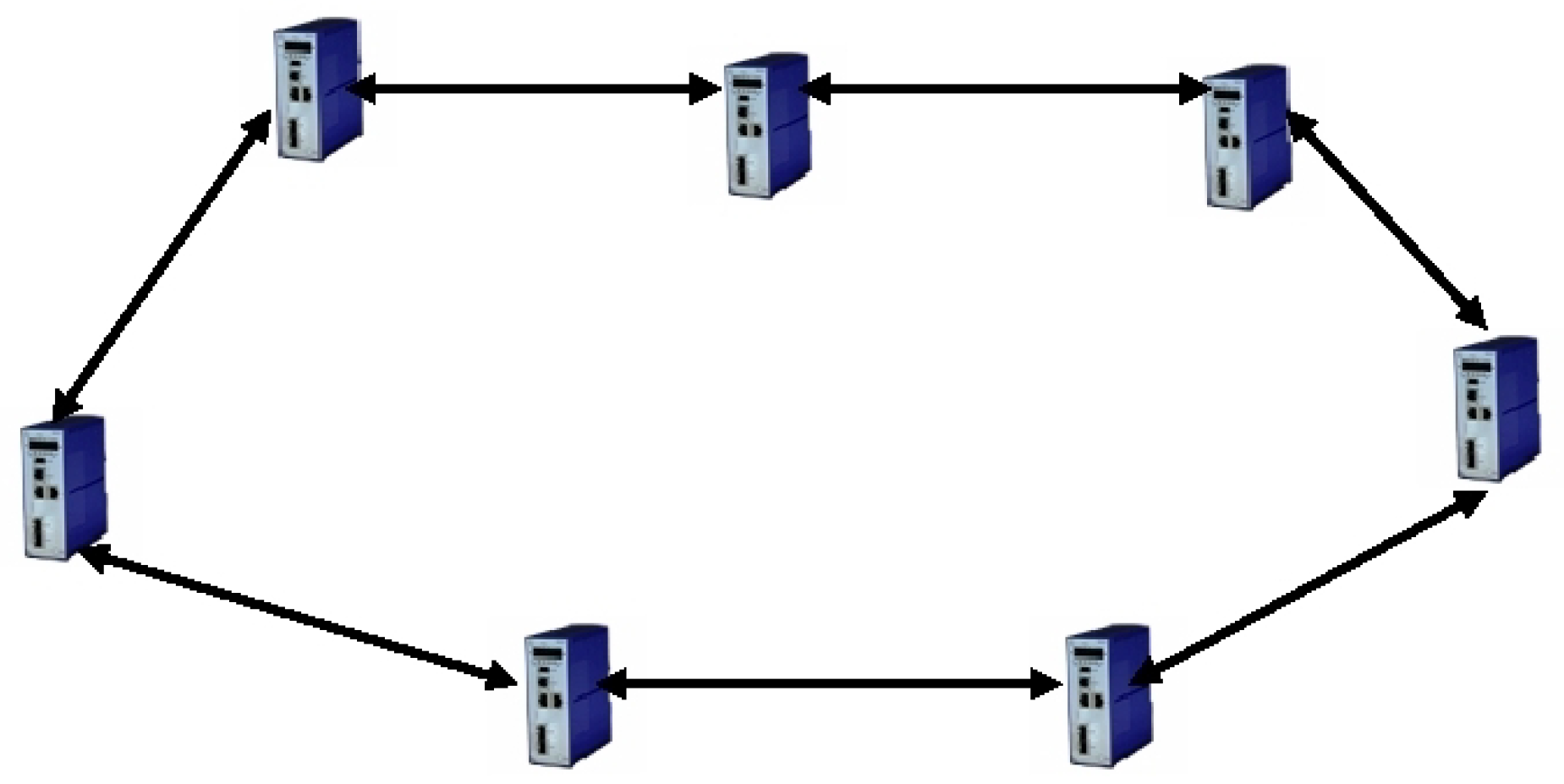
- A ring topology: The ring topology is very popular in industrial networks. It can be defined as a bus topology from which the first and last device is connected. A ring topology is presented in Figure 9.
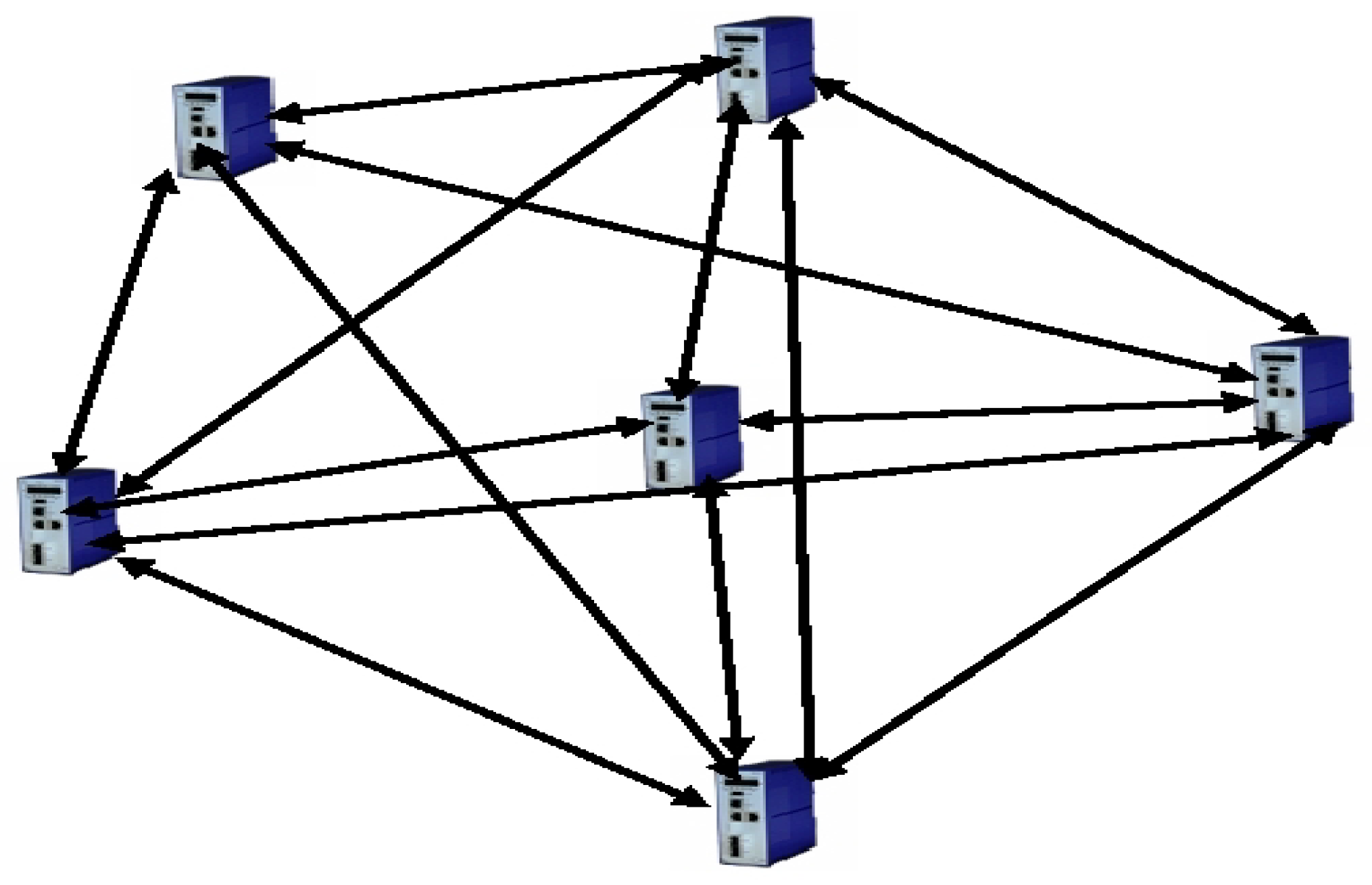
- A mesh topology: In the mesh topology, devices are interconnected through several connections coming back and forth from one device to another. A graphical representation of the mesh topology is presented in Figure 10.
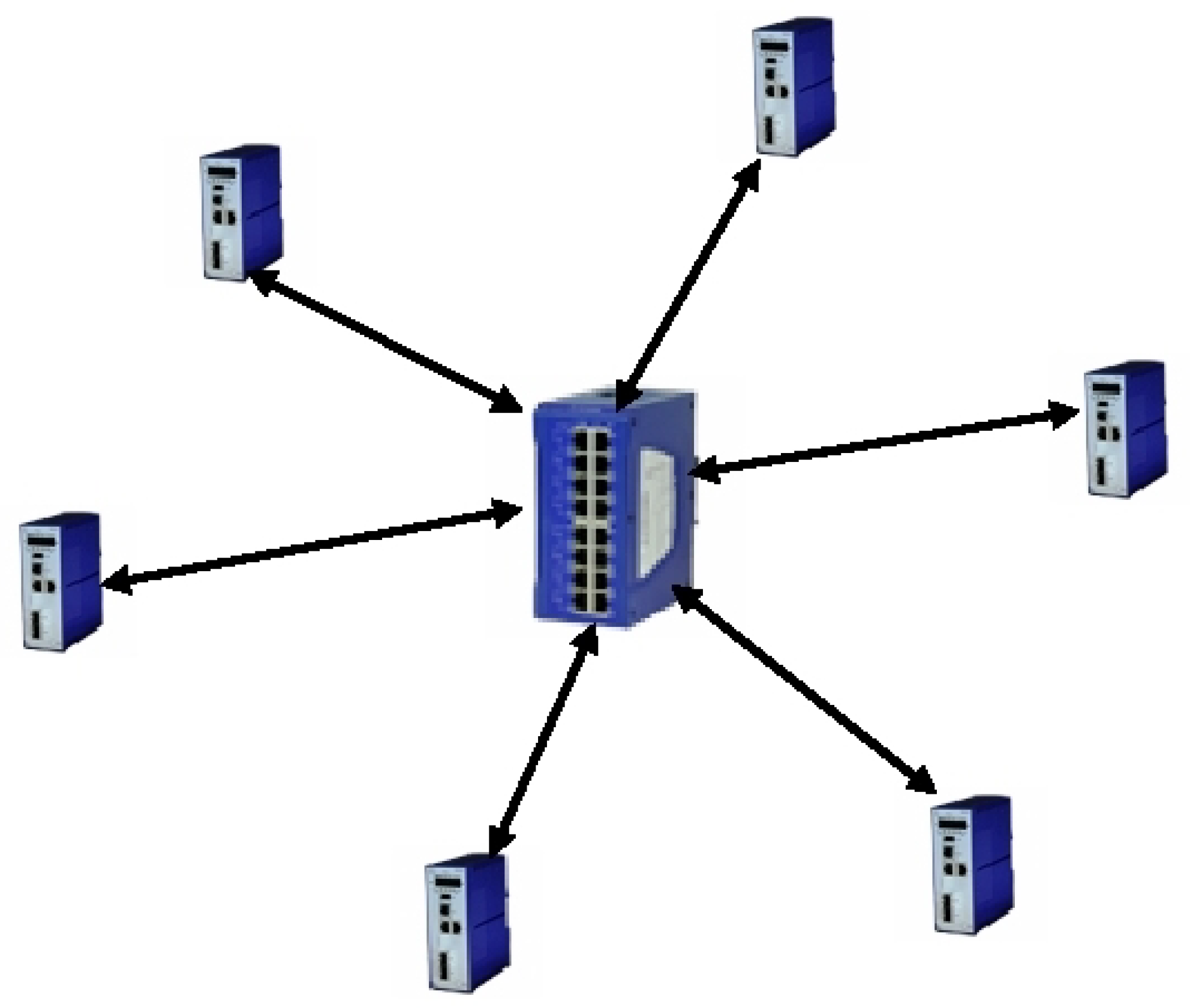
- A star topology: In a star topology, devices are connected to each other via a single switch. It is the preferred topology for the office environment. Figure 11 an illustration of this topology.
3. Some Industrial Network Redundancy Protocols in Ip-Based Communication Networks
3.1. Standard Redundancy Protocols
- Rapid Spanning Tree Protocol (RSTP): RSTP is an improved version of the spanning tree protocol (STP) implemented for loop prevention in Ethernet networks [37]. RSTP can be used in various network topologies. It also offers a higher number of network participants than the original STP (of up to forty switches for a ring topology) and a better recovery time of a minimum of one second. However, the recovery time of RSTP, which depends on the positioning of the network switch, can increase to more than one second and is not enough to offer deterministic behavior to critical industrial applications that require highly ultra-low latency.
- Media Redundancy Protocol (MRP): MRP is a ring redundancy protocol that provides high availability for Ethernet networks when it comes to network recovery [64]. The protocol supports up to fifty network participants and a recovery time of 500ms for a worst-case scenario. One of the links (redundant link) remains blocked in an MRP ring until there is a fault in the network. Each MRP ring has a switch configured as a manager that monitors the network state and detects failure to activate the redundant link [33]. Although MRP offers perfect recovery time for most industrial network applications, it is still insufficient to satisfy some time-critical applications like specific IIoT applications that do not tolerate any downtime. For such applications, zero-loss redundancy protocols were introduced [65].
3.2. Zero-Loss Redundancy Protocols for IP-Based Industrial Networks
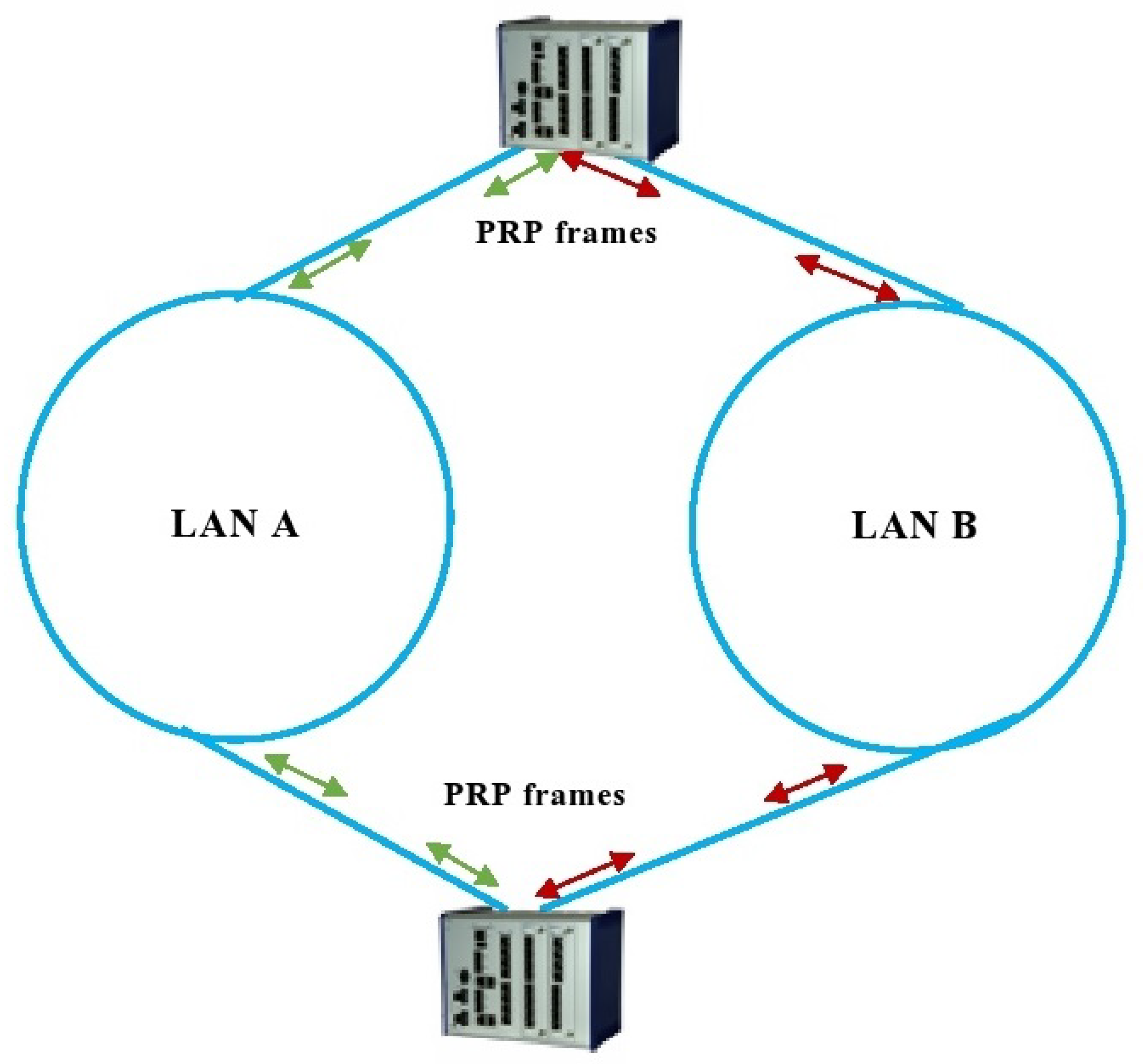
- Parallel Redundancy Protocol (PRP): PRP is a protocol (in the International Electrotechnical Commission-IEC 62439-3 standard) developed to achieve zero loss recovery time whenever a failure occurs in a network. A protocol is applied closer to the end-devices while the remaining network switches can use different other protocols. The operational principle of PRP is to send duplicated frames from a PRP capable end-device, called Double-Attached Node supporting PRP (DAN P), or from a Redundancy Box (RedBox), which is a switch that supports the PRP protocol, to the corresponding PRP device which accepts the first frame arriving and discards the second one. The implementation of PRP depends on two independent networks (Local Area Network-LAN A and Local Area Network-LAN B) through which the transmitted frame travels until it reaches its destination. The two independent networks can have a different redundancy protocol, such as RSTP, MRP, or none (single switches connected). By sending duplicated frames in independent networks, the PRP protocol ensures that a frame will always reach the destination at the source speed even if a physical failure happens in one of the networks [66]. Figure 12 is an illustration of the operation in a PRP network [66].
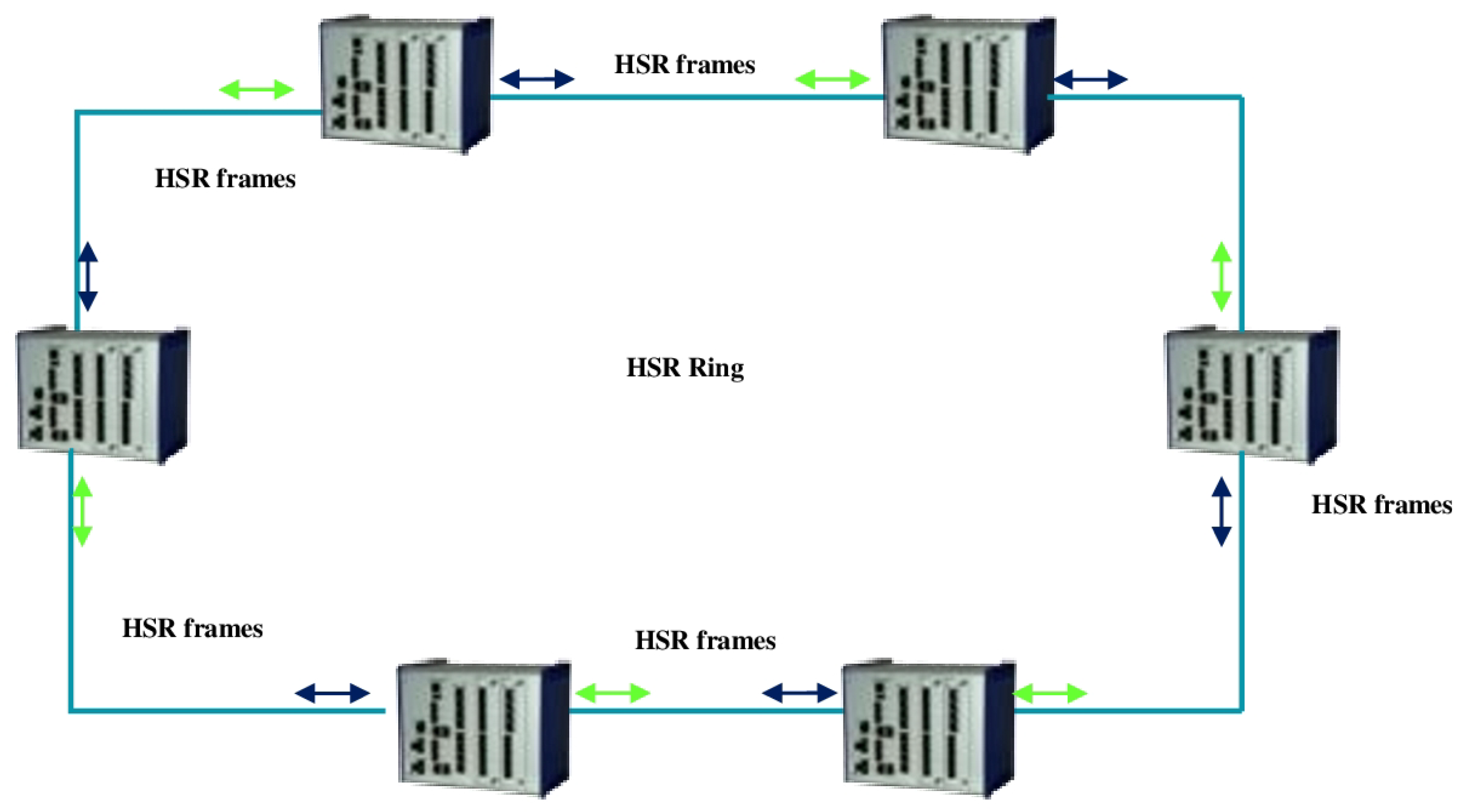
- High-Availability Seamless Redundancy Protocol (HSRP): Like PRP, HSR is a zero-loss redundancy protocol defined by the IEC 62439-3 standard. It also consists of sending duplicated frames through the network to ensure prompt delivery to the destination in hardware or software failure in network devices. The HSR protocol is designed for use in a ring topology only with a maximum of 512 participants. In an HSR network, all ring devices need to support the HSR protocol to forward duplicated frames and discard the one arriving second. The HSR capable devices are called Double-Attached Node supporting HSR (DAN H) [66,67]. Figure 13 is a graphical representation of operations in an HSR network [66].
4. Results and Discussions
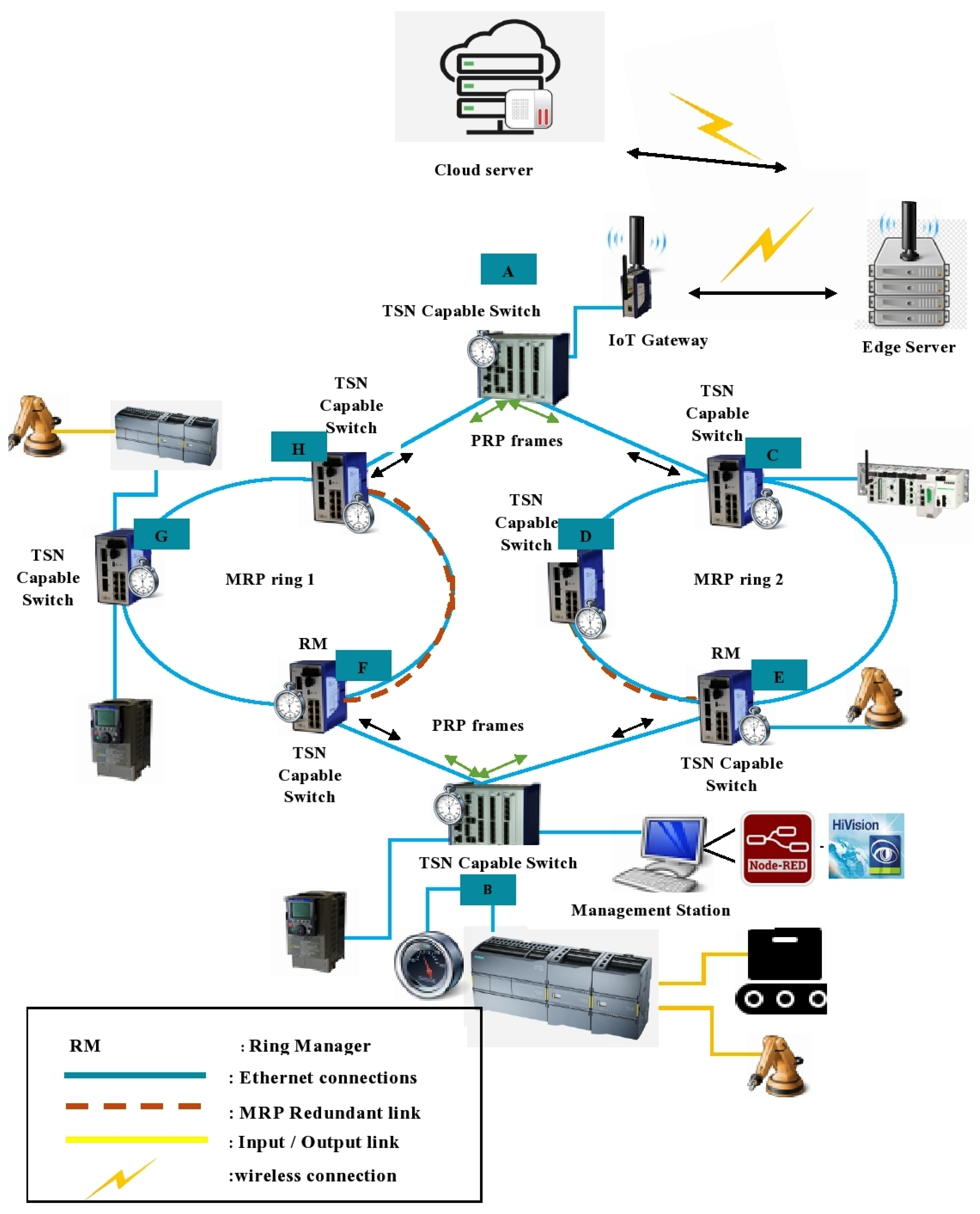
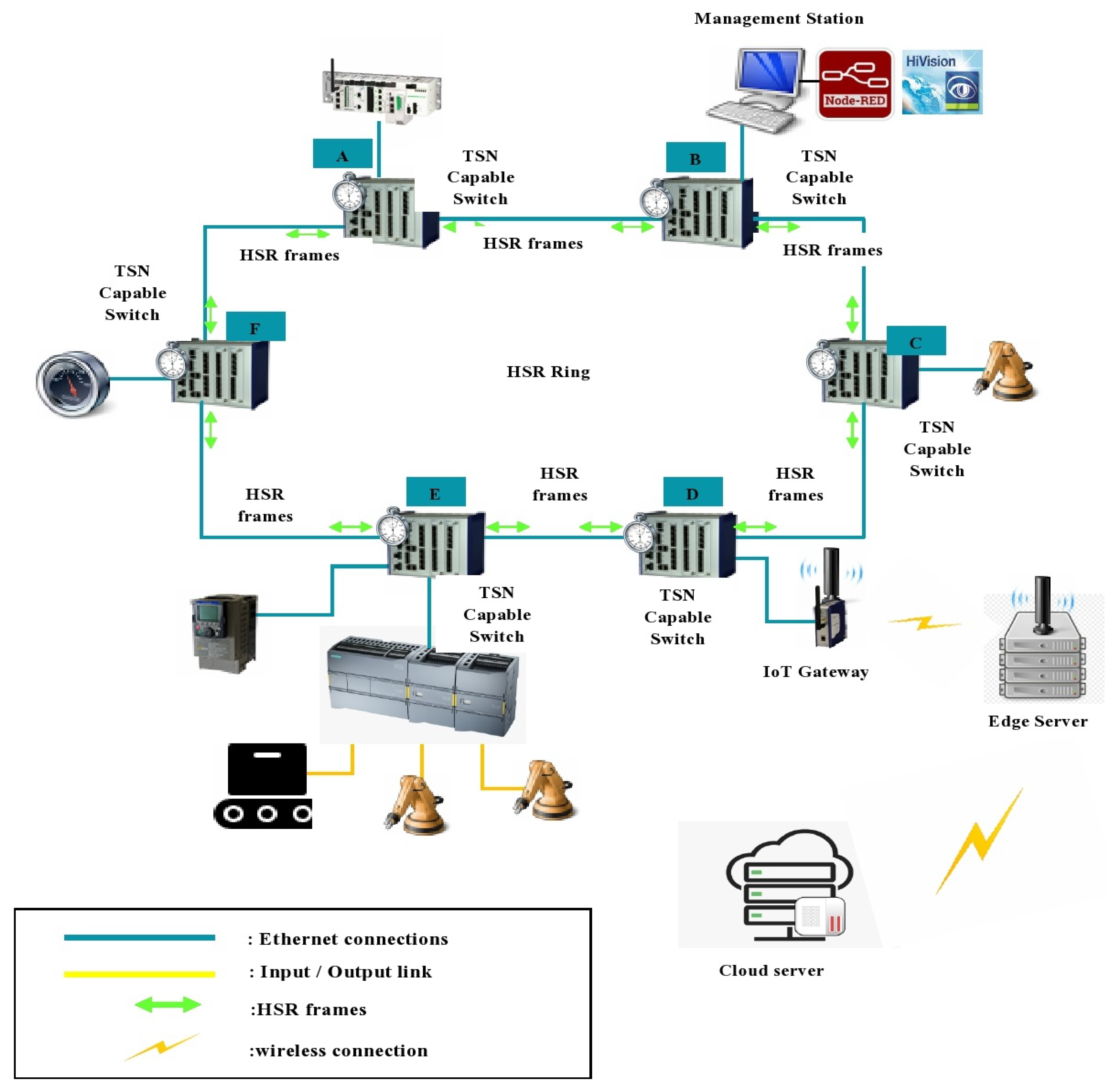
4.1. The Effective Network Communication Prototypes Design
4.2. Frame Transmission Time in TSN-Capable versus Non-TSN-Capable Network Switches
4.3. Our Proposed Network Communication Prototypes versus Standalone Protection Schemes (RSTP and MRP)
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Minimum communication frame delay | |
| Frame processing delay from the source node or switch | |
| Processing delay at the destination node | |
| Delay generated by the frame transmission | |
| Delay caused by the electrical signal traveling through the physical medium | |
| Size of the transmitted frame in bits | |
| x | Link data rate in bits per seconds |
| Overall frame communication delay when stored before transmission | |
| Frame delay in switch memory | |
| Number of frames waiting in the switch memory | |
| IFG | Inter frame gap |
| Data size of the frame in the queue | |
| Overhead of the frame | |
| Frame delay from point Y to point Z | |
| Delay to transmit all frames into the link | |
| Delay a frame encounters to travel on each link based on its data rate | |
| Frame processing delay from a switch ingress port to its egress port |
References
- Dao, N.; Lee, Y.; Cho, S.; Kim, E.; Chung, K.; Keum, C. Multi-tier multi-access edge computing: The role for the fourth industrial revolution. In Proceedings of the 2017 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Korea, 18–20 October 2017; pp. 1280–1282. [Google Scholar]
- Al-Gumaei, K.; Schuba, K.; Friesen, A.; Heymann, S.; Pieper, C.; Pethig, F.; Schriegel, S. A survey of Internet of Things and big data integrated solutions for industrie 4.0. In Proceedings of the 2018 IEEE 23rd International Conference on Emerging Technologies and Factory Automation (ETFA), Turin, Italy, 4–7 September 2018; pp. 1417–1424. [Google Scholar]
- Bedi, G.; Venayagamoorthy, K.; Singh, R.; Brooks, R.R.; Wang, K.C. Review of Internet of Things (IoT) in electric power and energy systems. IEEE Internet Things J. 2018, 5, 847–870. [Google Scholar] [CrossRef]
- Miraz, M.H.; Ali, M.; Excell, P.S.; Picking, R. A Review on Internet of Things (IoT), Internet of Everything (IoE) and Internet of Nano Things (IoNT); Internet Technologies and Applications (ITA): Wrexham, UK, 2015; pp. 219–224. [Google Scholar]
- Yang, G.; Xie, L.; Mantysalo, M.; Zhou, X.L.; Pang, Z.B.; Xu, L.D.; Kao-Walter, S.; Chen, Q.; Zheng, L.R. A health-IoT platform based on the integration of intelligent packaging, unobtrusive bio-sensor, and intelligent medicine box. IEEE Trans. Ind. Inform. 2014, 10, 2180–2191. [Google Scholar] [CrossRef] [Green Version]
- Pasluosta, C.F.; Gassner, H.; Winkler, J.; Klucken, J.; Eskofier, B.M. An emerging era in the management of Parkinson disease: Wearable technologies and the internet of things. IEEE J. Biomed. Health Inform. 2015, 19, 1873–1881. [Google Scholar] [CrossRef] [PubMed]
- Lin, J.; Yu, W.; Zhang, N.; Yang, X.Y.; Zhang, H.L.; Zhao, W. AA survey on internet of things: Architecture, enabling technologies, security and privacy, and applications. IEEE Internet Things J. 2017, 4, 1125–1142. [Google Scholar] [CrossRef]
- Schriegel, S.; Kobzan, T.; Jasperneite, J. Investigation on a distributed SDN control plane architecture for heterogeneous time sensitive networks. In Proceedings of the 2018 14th IEEE International Workshop on Factory Communication Systems (WFCS), Imperia, Italy, 13–15 June 2018; pp. 1–10. [Google Scholar]
- Kharb, S.; Singhrova, A. Fuzzy based priority aware scheduling technique for dense industrial iot networks. J. Netw. Comput. Appl. 2019, 125, 17–27. [Google Scholar] [CrossRef]
- Perera, C.; Liu, C.H.; Jayawardena, S.; Chen, M. A survey on Internet of Things from industrial market perspective. IEEE Access 2014, 2, 1660–1679. [Google Scholar] [CrossRef]
- Rezaeibagha, F.; Mu, Y.; Huang, X.; Yang, W.; Huang, K. Fully Secure Lightweight Certificateless Signature Scheme for IIoT. IEEE Access 2019, 7, 144433–144443. [Google Scholar] [CrossRef]
- Jaloudi, S. Communication Protocols of an Industrial Internet of Things Environment: A Comparative Study. Future Internet 2019, 11, 66. [Google Scholar] [CrossRef] [Green Version]
- Heymann, S.; Stojanovci, L.; Watson, K.; Nam, S.; Song, B.; Gschossmann, H.; Schriegel, S.; Jasperneite, J. Cloud-based plug and work architecture of the IIC testbed smart factory Web. In Proceedings of the 2018 IEEE 23rd International Conference on Emerging Technologies and Factory Automation (ETFA), Turin, Italy, 4–7 September 2018; pp. 187–194. [Google Scholar]
- Kobzan, T.; Schriegel, S.; Althoff, S.; Boschmann, A.; Otto, J.; Jasperneite, J. Secure and time-sensitive communication for remote process control and monitoring. In Proceedings of the 2018 IEEE 23rd International Conference on Emerging Technologies and Factory Automation (ETFA), Turin, Italy, 4–7 September 2018; pp. 1105–1108. [Google Scholar]
- Prinz, F.; Schoeffler, M.; Lechler, A.; Verl, A. End-to-end Redundancy between Real-time I4.0 Components based on Time-Sensitive Networking. In Proceedings of the 2018 IEEE 23rd International Conference on Emerging Technologies and Factory Automation (ETFA), Turin, Italy, 4–7 September 2018; pp. 1083–1086. [Google Scholar]
- Ergenç, D.; Fischer, M. On the Reliability of IEEE 802.1CB FRER. In Proceedings of the IEEE INFOCOM 2021—IEEE Conference on Computer Communications, Virtual Conference, 10–13 May 2021; pp. 1–10. [Google Scholar]
- Bruckner, D.; Stănică, M.P.; Blair, R.; Schriegel, S.; Kehrer, S.; Seewald, M.; Sauter, T. An Introduction to OPC UA TSN for Industrial Communication Systems. Proc. IEEE 2019, 107, 1121–1131. [Google Scholar] [CrossRef]
- Yu, Q.; Gu, M. Adaptive group routing and scheduling in multicast time-sensitive networks. IEEE Access 2020, 8, 37855–37865. [Google Scholar] [CrossRef]
- Vlk, M.; Hanzálek, Z.; Brejchová, K.; Tang, S.; Bhattacharjee, S.; Fu, S. Enhancing Schedulability and Throughput of Time-Triggered Traffic in IEEE 802.1Qbv Time-Sensitive Networks. IEEE Trans. Commun. 2020, 68, 7023–7038. [Google Scholar] [CrossRef]
- Zhu, H.; Liu, K.; Yan, Y.; Zhang, H.; Huang, T. Measures to Improve the Accuracy and Reliability of Clock Synchronization in Time-Sensitive Networking. IEEE Access 2020, 8, 192368–192378. [Google Scholar] [CrossRef]
- Jin, X.; Xia, C.; Guan, N.; Zeng, P. Joint Algorithm of Message Fragmentation and No-Wait Scheduling for Time-Sensitive Networks. IEEE/CAA J. Autom. Sin. 2021, 8, 478–490. [Google Scholar] [CrossRef]
- Jin, X.; Xia, C.; Guan, N.; Xu, C.; Li, D.; Yin, Y.; Zeng, P. Real-time scheduling of massive data in time sensitive networks with a limited number of schedule entries. IEEE Access 2020, 8, 6751–6767. [Google Scholar] [CrossRef]
- Cao, K.; Liu, Y.; Meng, G.; Sun, Q. An overview on edge computing research. IEEE Access 2020, 8, 85714–85728. [Google Scholar] [CrossRef]
- Chen, B.; Wan, J.; Celesti, A.; Li, D.; Abbas, H.; Zhang, Q. Edge Computing in IoT-Based Manufacturing. IEEE Commun. Mag. 2018, 9, 103–109. [Google Scholar] [CrossRef]
- Pustokhina, I.V.; Pustokhin, D.A.; Gupta, D.; Khanna, A.; Shankar, K.; Nguyen, G.N. An Effective Training Scheme for Deep Neural Network in Edge Computing Enabled Internet of Medical Things (IoMT) Systems. IEEE Access 2020, 8, 107112–107123. [Google Scholar] [CrossRef]
- Qi, Q.; Tao, F. A Smart Manufacturing Service System Based on Edge Computing, Fog Computing, and Cloud Computing. IEEE Access 2019, 7, 86769–86777. [Google Scholar] [CrossRef]
- Liao, H.; Zhou, Z.; Zhao, X.; Zhang, L.; Mumtaz, S.; Jolfaei, A.; Ahmed, S.H.; Bashir, A.K. Learning-Based Context-Aware Resource Allocation for Edge-Computing-Empowered Industrial IoT. IEEE Internet Things J. 2020, 7, 4260–4277. [Google Scholar] [CrossRef]
- Gong, C.; Lin, F.; Gong, X.; Lu, Y. Intelligent Cooperative Edge Computing in Internet of Things. IEEE Internet Things J. 2020, 7, 9372–9382. [Google Scholar] [CrossRef]
- Carvalho, A.; O’Mahony, N.; Krpalkova, L.; Campbell, S.; Walsh, J.; Doody, P. Edge computing applied to industrial machines. Procedia Manuf. 2019, 38, 178–185. [Google Scholar] [CrossRef]
- Chen, Y.; Sun, Y.; Lu, N.; Wang, B. Channel-reserved medium access control for edge computing based IoT. J. Netw. Comput. Appl. 2020, 150, 102500. [Google Scholar] [CrossRef]
- Roig, P.J.; Alcaraz, S.; Gilly, K. Formal Specification of Spanning Tree Protocol Using ACP. Elektron. Elektrotech. 2017, 23, 84–91. [Google Scholar]
- Longo, E.; Redondi, A.E.C.; Cesana, M.; Arcia-Moret, A.; Manzoni, P. MQTT-ST: A Spanning Tree Protocol for Distributed MQTT Brokers. In Proceedings of the ICC 2020–2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Giorgetti, A.; Cugini, F.; Paolucci, F.; Valcarenghi, L.; Pistone, A.; Castoldi, P. Performance analysis of media redundancy protocol (MRP). IEEE Trans. Ind. Inform. 2013, 9, 218–227. [Google Scholar] [CrossRef]
- Naukkarinen, H. Ethernet Technology in Safety Automation. Bachelor’s Thesis, Metropolia University of Applied Sciences, Vantaa, Finland, 2020. [Google Scholar]
- Musaddiq, A.; Zikria, Y.B.; Hahm, O.; Yu, H.; Bashir, A.K.; Kim, S.W. A survey on resource management in IoT operating systems. IEEE Access 2018, 6, 8459–8482. [Google Scholar] [CrossRef]
- Wylian, S.F. Multiple Spanning-Tree (MST) to Improve Enterprise Network Security. Available online: https://elar.urfu.ru/bitstream/10995/84223/1/978-5-91256-486-4_2020_083.pdf (accessed on 29 October 2021).
- Willis, P.; Shenoy, N.; Pan, Y.; Hamilton, J. Root Redundancy in Meshed Tree Bridged Networks. In Proceedings of the IEEE 45th Conference on Local Computer Networks (LCN), Sydney, Australia, 16–19 November 2020; pp. 297–308. [Google Scholar]
- Xu, B.; Gao, J.; Bosley, B.; Garcia, J.; Clark, T. Fast Load Shedding Scheme for Enhancing Reliability and Stability of Expanded Liquified Gas Plant. In Proceedings of the 74th Conference for Protective Relay Engineers (CPRE), College Station, TX, USA, 22–25 March 2021; pp. 1–7. [Google Scholar]
- Lo Bello, L.; Steiner, W. A Perspective on IEEE Time-Sensitive Networking for Industrial Communication and Automation Systems. Proc. IEEE 2019, 6, 1094–1120. [Google Scholar] [CrossRef]
- Ali, A.; Feng, L.; Bashir, A.K.; El-Sappagh, S.; Ahmed, S.H.; Iqbal, M.; Raja, G. Quality of service provisioning for heterogeneous services in cognitive radio-enabled internet of things. IEEE Trans. Netw. Sci. Eng. 2020, 7, 328–342. [Google Scholar] [CrossRef]
- Muhammad, G.; Alhamid, M.F.; Alsulaiman, M.; Gupta, B. Edge computing with cloud for voice disorder assessment and treatment. IEEE Commun. Mag. 2018, 56, 60–65. [Google Scholar] [CrossRef]
- Lee, K.C.; Lee, S.; Lee, M.H. Worst Case Communication Delay of Real-Time Industrial Switched Ethernet with Multiple Levels. IEEE Trans. Ind. Electron. 2006, 53, 1669–1676. [Google Scholar] [CrossRef]
- Karachalios, K. A Vision for the Next Wave of Connectedness; IEEE GSMA PSMC: Barcelona, Spain, 2017. [Google Scholar]
- Oyekanlu, E. Predictive edge computing for time series of industrial IoT and large scale critical infrastructure based on open-source software analytic of big data. In Proceedings of the 2017 IEEE International Conference on Big Data, Boston, MA, USA, 11–14 December 2017; pp. 1663–1669. [Google Scholar]
- Islam, M.T.; Taha, A.E.M.; Akl, S. A survey of access management techniques in machine type communications. IEEE Commun. Mag. 2014, 52, 74–81. [Google Scholar] [CrossRef]
- Anagnostopoulos, C.; Kolomvatsos, K. An intelligent, time-optimized monitoring scheme for edge nodes. J. Netw. Comput. Appl. 2019, 148, 102458. [Google Scholar] [CrossRef]
- Ray, P.P.; Dash, D.; De, D. Edge computing for Internet of Things: A survey, e-healthcare case study and future direction. J. Netw. Comput. Appl. 2019, 140, 1–22. [Google Scholar] [CrossRef]
- Raileanu, S.; Borangiu, T.; Morariu, O.; Iacob, I. Edge Computing in Industrial IoT Framework for Cloud-based Manufacturing Control. In Proceedings of the 2018 22nd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 10–12 October 2018; pp. 261–266. [Google Scholar]
- Huynh, M.; Goose, S.; Mohapatra, P.; Liao, R. RRR: Rapid Ring Recovery Submillisecond Decentralized Recovery for Ethernet Ring. IEEE Trans. Comput. 2011, 60, 1561–1570. [Google Scholar] [CrossRef]
- Nigel, B. PRfc 2544 Testing of Ethernet Services in Telecom Networks—White Paper; Agilent Technologies: Santa Clara, CA, USA, 2004; Available online: http://literature.cdn.keysight.com/litweb/pdf/5989-1927EN.pdf (accessed on 10 November 2021).
- Gutiérrez, C.S.V.; Juan, L.U.S.; Ugarte, I.Z.; Vilches, V.M. Time sensitive networking for robotics. arXiv 2018, arXiv:1804.07643. [Google Scholar]
- Maestro, J.A.; Reviriego, P. Energy Efficiency in Industrial Ethernet: The Case of Powerlink. IEEE Trans. Ind. Electron. 2010, 57, 2896–2903. [Google Scholar] [CrossRef]
- Skeie, T.; Johannessen, S.; Holmeide, O. Timeliness of real-time IP communication in switched industrial Ethernet networks. IEEE Trans. Ind. Inform. 2006, 2, 25–39. [Google Scholar] [CrossRef]
- Farkas, J.; Bello, L.L.; Gunther, C. TTime-sensitive networking standards. IEEE Commun. Stand. Mag. 2018, 2, 20–21. [Google Scholar] [CrossRef]
- Adame, T.; Carrascosa, M.; Bellalta, B. Time-Sensitive Networking in IEEE 802.11 be: On the Way to Low-latency WiFi 7. Sensors 2020, 21, 4954. [Google Scholar] [CrossRef]
- Tian, S.; Hu, Y. The Role of OPC UA TSN in IT and OT Convergence. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 2272–2276. [Google Scholar]
- Fu, S.; Zhang, H.; Chen, J. Time-sensitive networking technology overview and performance analysis. ZTE Commun. 2018, 16, 57–64. [Google Scholar]
- Prinz, F.; Schoeffler, M.; Lechler, A.; Verl, A. A Dynamic real-time orchestration of i4.0 components based on time-sensitive networking. Procedia CIRP 2018, 72, 910–915. [Google Scholar] [CrossRef]
- Ashjaei, M.; Lo Bello, L.; Daneshtalab, M.; Patti, G.; Saponara, S.; Mubeen, S. Time-Sensitive Networking in automotive embedded systems: State of the art and research opportunities. J. Syst. Archit. 2021, 117, 102137. [Google Scholar] [CrossRef]
- Vitturi, S.; Zunino, C.; Sauter, T. Industrial Communication Systems and Their Future Challenges: Next-Generation Ethernet, IIoT, and 5G. Proc. IEEE 2019, 107, 944–961. [Google Scholar] [CrossRef]
- Farkas, J. TSN Basic Concepts. DetNet – TSN workshop 2018. Available online: https://www.ieee802.org/1/files/public/docs2018/detnet-tsn-farkas-tsn-basic-concepts-1118-v01.pdf (accessed on 10 November 2021).
- Wu, F.; Tian, A. rXstp: A Topology Discovery Mechanism Based on Rapid Spanning Tree for SDN In-Band Control. In Proceedings of the International Conference on Communications, Information System and Computer Engineering (CISCE), Beijing, China, 14–16 May 2021; pp. 703–706. [Google Scholar]
- Lindstrom, H. Migration to P4-Programmable Switches and Implementation of the Rapid Spanning Tree Protocol. Master’s Thesis, Linköping University, Linköping, Sweden, 2020. [Google Scholar]
- Peón, P.G.; Steiner, W.; Uhlemann, E. Network Fault Tolerance by Means of Diverse Physical Layers. In Proceedings of the 25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vienna, Austria, 8–11 September 2020; pp. 1697–1704. [Google Scholar]
- Media Redundancy Concepts—High Availability in Industrial Ethernet. Available online: https://www.belden.com/hubfs/emea/resources/Picture%20Park%20Assets\/Files%20for%20Redirection/WP_%20Media%20Redundancy%20\Concepts_Original_64020.pdf (accessed on 2 February 2021).
- Araujo, J.A.; Lázaro, J.; Astarloa, A.; Zuloaga, A.; Gárate, J.I. PRP and HSR for High Availability Networks in Power Utility Automation: A Method for Redundant Frames Discarding. IEEE Trans. Smart Grid 2015, 6, 2325–2332. [Google Scholar] [CrossRef]
- Khoshnevisan, M.; Joseph, V.; Gupta, P.; Meshkati, F.; Prakash, R.; Tinnakornsrisuphap, P. 5G Industrial Networks With CoMP for URLLC and Time Sensitive Network Architecture. IEEE J. Sel. Areas Commun. 2019, 37, 947–959. [Google Scholar] [CrossRef]
- Suljic, H.; Muminovic, M. Performance Study and Analysis of Time Sensitive Networking. Master’s Thesis, Malardalen University School of Innovation Design and Engineering Vasteras, Västerås, Sweden, 2019. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Redundancy Protocol | Network Topology | Max. Number of Switches | Recovery Time | Protection Limitation |
|---|---|---|---|---|
| RSTP | Ring | 40 | ≥2 s (Depends on network size) | Single link failure |
| RSTP | Mesh, Start, Any other | Infinite | ≥2 s | Single link failure (Except for mesh) |
| MRP | Ring | 50 | 500 ms | Single link failure |
| PRP | Double networks | Infinite | 0 ms | Multiple link failure |
| HSR | Ring | 512 | 0 ms | Single link failure |
| Switches | Redundancy Protocol | Redundancy Protocol |
|---|---|---|
| A | PRP | TSN capable |
| B | PRP | TSN capable |
| C | MRP (ring 2) | TSN capable |
| D | MRP (ring 2) | TSN capable |
| E | MRP (ring 2) | TSN capable, Ring Manager |
| F | MRP (ring 1) | TSN capable, Ring Manager |
| G | MRP (ring 1) | TSN capable |
| H | MRP (ring 1) | TSN capable |
| Network Protection Schemes | Advantages | Disadvantages |
|---|---|---|
| PRP-based prototype | Multi-link failures, 0 ms recovery time, Low communication latency with TSN and Edge computing technology | Requires a high number of infrastructure components (cabling and switches) and specialized switches supporting PRP technology |
| HSR-based prototype | 0 ms recovery time, Low communication latency with TSN and Edge computing technology, Low number of infrastructure components needed (simple ring topology) | Single-link failure, requires specialized switches supporting HSR technology in the entire ring |
| MRP | Low number of infrastructure components needed (simple ring topology), Standard redundancy protocol available in most industrial network switches | Single-link failure, Delayed recovery time, Communication latency |
| RSTP | Low number of infrastructure components needed (simple ring topology), Standard redundancy protocol available in most industrial network switches, Relatively easy to configure | Single-link failure, Delayed recovery time, Communication latency |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kiangala, K.S.; Wang, Z. An Effective Communication Prototype for Time-Critical IIoT Manufacturing Factories Using Zero-Loss Redundancy Protocols, Time-Sensitive Networking, and Edge-Computing in an Industry 4.0 Environment. Processes 2021, 9, 2084. https://doi.org/10.3390/pr9112084
Kiangala KS, Wang Z. An Effective Communication Prototype for Time-Critical IIoT Manufacturing Factories Using Zero-Loss Redundancy Protocols, Time-Sensitive Networking, and Edge-Computing in an Industry 4.0 Environment. Processes. 2021; 9(11):2084. https://doi.org/10.3390/pr9112084
Chicago/Turabian StyleKiangala, Kahiomba Sonia, and Zenghui Wang. 2021. "An Effective Communication Prototype for Time-Critical IIoT Manufacturing Factories Using Zero-Loss Redundancy Protocols, Time-Sensitive Networking, and Edge-Computing in an Industry 4.0 Environment" Processes 9, no. 11: 2084. https://doi.org/10.3390/pr9112084