1. Introduction
Recently, the water industry has been receiving global attention as an industry with potential growth in the future. Current trends indicate that the wastewater treatment industry is a rapidly growing industry globally. Thus, the demand for special pumps for transferring sewage containing solid wastes is increasing rapidly. However, grinder and vortex pumps that are mostly used for wastewater treatment are inefficient and cannot transfer sewage with solid wastes because of low efficiency and the need for frequent maintenance, among other factors. To overcome these problems, many research studies have been conducted on treating sewage containing solid wastes [
1,
2,
3,
4]. One such study proposed a single-channel impeller with a single free annulus passage, which can smoothly transfer sewage containing solid wastes. Moreover, it has a high efficiency and wide flow range compared with those of grinder and vortex pumps. However, the single-channel impeller has an unsymmetrical flow passage, and there is a limit to stabilizing unstable vibrations with the generated radial forces due to unsteady features between the stationary volute and rotating impeller. Moreover, a single-channel pump impeller produces unstable radial force sources at a general frequency specified by the impeller rotating speed [
4].
Researches on the interaction between the impeller and stator have been conducted over the past several years. Qin and Tsukamoto [
5] analyzed the unsteady flow characteristics caused by impeller–diffuser interaction in a diffuser pump using a singularity method. The pressure fluctuation characteristics generated by rotor–stator interaction in a diffuser pump were investigated numerically by Shi and Tsukamoto [
6]. As the result, it was confirmed that the flow characteristics generated by the impeller–diffuser interaction can be analyzed through an unsteady flow analysis. The unsteady flow characteristics between the radial impeller and diffuser in a radial pump were investigated by Feng et al. [
7]. The flow between the impeller and diffuser was analyzed effectively by using the unsteady Reynold-averaged Navier–Stokes (RANS) analysis and laser Doppler velocimetry (LDV), and it was reported that there are two types of interaction effects between a rotor and stator. One was the downstream effect induced by the impeller, which has an unsteady flow characteristic because of the highly distorted flow field and the wake of the impeller. The other was the upstream effect induced by the stator, which induces unsteady pressure fluctuations. Experimental and computational numerical studies for investigating unsteady hydrodynamic forces on the diffuser pump impeller were performed by Zhang and Tsukamoto [
8]. The hydrodynamic unsteady forces acting on the pump impeller were analyzed by varying the number of impeller blades. It was found that the hydrodynamic force was smaller when the blade number of impellers was equal to the diffuser vane number. However, pressure fluctuation was the largest compared with that in other cases. Benra [
9] measured the hydrodynamic forces acting on the blade of a single-channel pump. Fluid-structure interaction (FSI) was used for numerical analysis of hydrodynamic forces, and the deflection of the blade was measured using proximity sensors. The vibration induced by the blade was transmitted to the volute and pipes. This phenomenon occurred periodically according to the rotation of the blade, and it was confirmed that the hydrodynamic force increases as the flow rate of the pump increases. Nishi et al. [
10] proposed a single-channel pump design to increase the amount of solid waste passing through the impeller and to improve the pump performance. The results of the study showed that the pump efficiency exceeded 62%. Pei et al. [
11] analyzed the flow characteristics of a single-blade centrifugal pump through numerical analysis and confirmed that unsteady flow characteristics are distributed according to the position of the blade. In addition, it has been reported that the stability of a single-channel pump can be improved by optimizing the flow characteristic or flow path between the blade and volute. These unsteady radial force sources were generally induced by the impeller–volute interaction, and consequentially, these sources adversely affected the entire hydraulic and mechanical performances (durability, life expectancy, etc.) of a single-channel pump. Therefore, an advanced design technique that can concurrently enhance hydraulic efficiency and decrease these unsteady sources is required.
To achieve multiple goals simultaneously, optimization methods using numerical analysis are widely used. Classical methods such as decomposition, Lagrangian techniques and cutting plane methods were previously applied to find optimal points. However, these classic optimization methods are ineffective for practical engineering problems. Hence, many studies were focused on exploratory optimization algorithms, such as a particle swarm optimization (PSO) [
12] and genetic algorithm (GA) [
13] to identify global optima, because the classic methods can be trapped in local optima according to the initially set value. These exploratory optimization methods combined with three-dimensional (3-D) RANS analysis have been generally used to find the best design solutions in the last decades—especially for turbomachinery designs [
14,
15]. Recently, a hybrid optimization algorithm was developed that combines the advantages of several optimization algorithms to improve computational efficiency. Robinson et al. [
16] sought to combine GA and PSO and introduced an initial model of hybrid PSO-GA. Shi et al. [
17] introduced an improved hybrid PSO-GA algorithm. The hybrid PSO-GA and GA were used to calculate benchmark test problems, and the performances of the algorithms were compared. The hybrid PSO-GA algorithm showed an improved performance with respect to the ability to identify optimal solutions and the speed of the convergence. Gandelli et al. [
18] established another hybrid PSO-GA algorithm by applying a novel combinations strategy and tested its performance using various benchmark test problems. The optimization using this hybrid PSO-GA algorithm led to consistent and effective results for the benchmark problems.
In fact, as shown in the above literatures, even though many computational optimization methodologies on various pump designs have been proposed, no systematic design works have been attempted for single-channel pumps. In the present work, the geometric shapes of the volute and impeller flow paths of a single-channel pump were systematically optimized to concurrently enhance hydraulic efficiency and decrease the unsteady radial forces by using hybrid PSO-GA based on a surrogate model. Here, for multi-objective optimization, the hydraulic efficiency and unsteady radial forces resulting from impeller–volute interaction were used as objective functions. These were then approximated using a radial-bias neural network (RBNN) model [
19]. Furthermore, as one of the design-of-experiment (DOE) methods, Latin hypercube sampling (LHS) [
20] was employed to efficiently choose the design points within the design space. This work is the follow-up study of the authors’ previous works [
21,
22,
23]. In the previous works, the authors verified that the design technique combined with the numerical analysis and optimization method is a practical tool for realizing the high-efficiency and low-fluid-induced vibration of the single-channel pump. Based on these results, the importance for objective functions was understood. Then, two objective functions were selected to design the high-efficiency and low-fluid-induced vibration single-channel pump. In addition to the hybrid PSO-GA, the advanced technique is used to improve the prediction accuracy and performance of the optimal design. The hybrid PSO-GA proved to be superior through some benchmark function tests, but rarely applied to the engineering problems [
16,
17,
18]. Therefore, in this study, it was verified whether the hybrid PSO-GA technique could be practically used in the actual pump design step.
3. Optimization Techniques
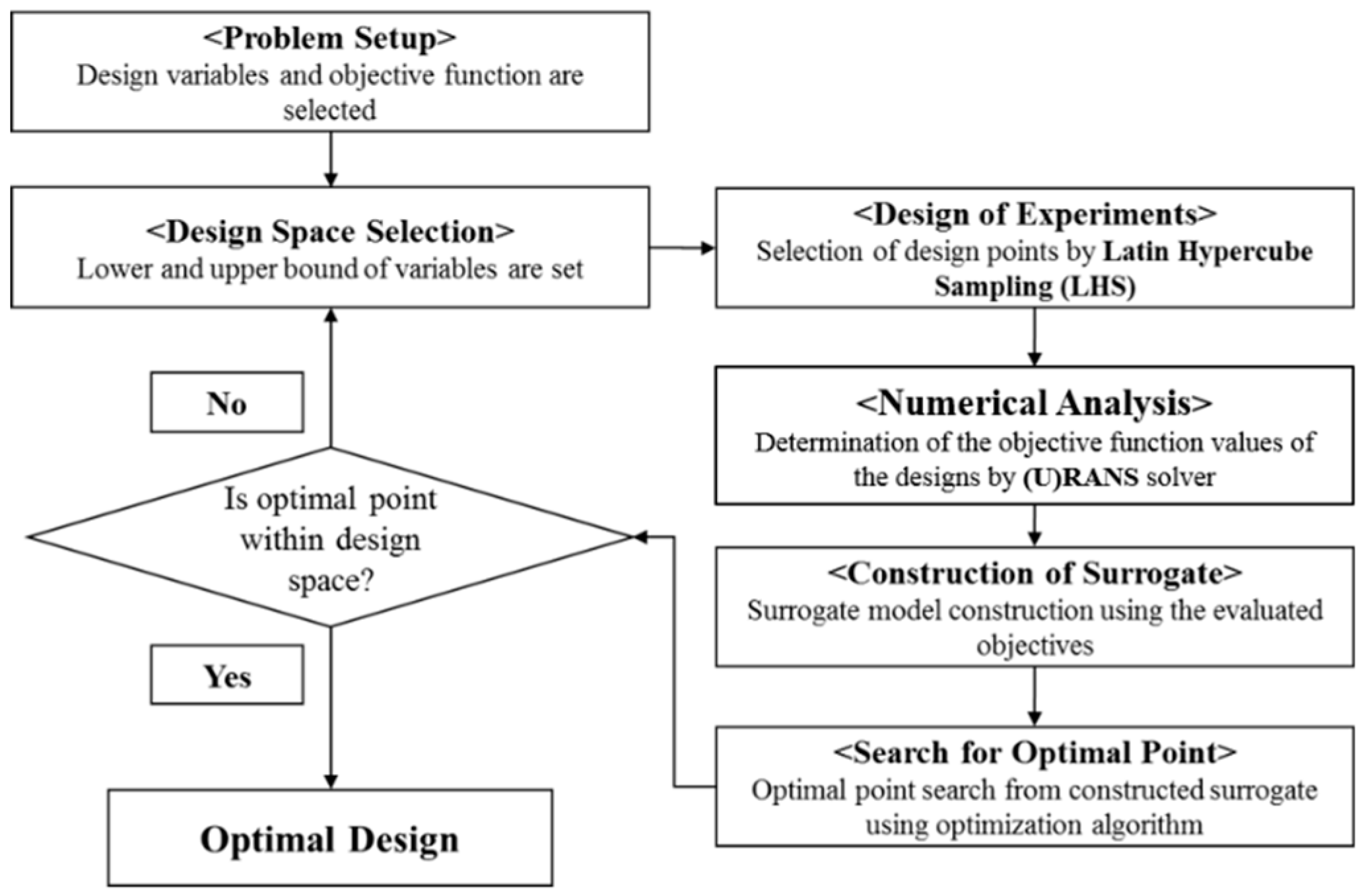
The flowchart for the multi-objective optimization process using surrogate modeling is shown in
Figure 4. First, the objective functions and constraints are defined according to the design goal. Subsequently, the design variables considering constraints are chosen. The LHS [
20] is used as DOE to select the design points and the objective functions are evaluated by (U)RANS analysis at these design points. The next step is the construction of surrogate model to approximate the objective functions and a searching algorithm, that is, hybrid PSO-GA, is used to combine and formulate these surrogate models. Finally, Pareto-optimal solutions—that is, a collection of non-dominated solutions—are derived and the multi-objective optimization procedure is terminated [
26].
3.1. Optimization Goal
The design goals of the current multiple optimization were to concurrently reduce the radial force sources and improve the hydraulic efficiency. The hydraulic efficiency, one of the objective functions, is defined as follows:
where,
H,
Q,
ρ, g, and
P represent total head, volume flow rate, the density, gravity acceleration, and power, respectively.
Other objective functions for the radial force sources are the distance of the mass center of the sweep area from the origin and the sweep area of the radial force during one revolution, as follows:
where,
As represents the signed area of the polygon, considered as the sweep area of the radial force during one revolution. The centroid of a non-self-intersecting closed polygon defined by
n vertices (
x0,
y0), (
x1,
y1), …, (
x(n-1),
y(n-1)) is defined as the point (
Cx,
Cy), as follows:
The vertices in these equations are defined as being numbered in sequence along the perimeter of the polygon. Hence, the distance of the mass center of the sweep area from the origin can be finally defined as follows:
Thus, in order to fulfil the design goals described above, multi-objective optimization was performed using Fη and Fradial as objective functions.
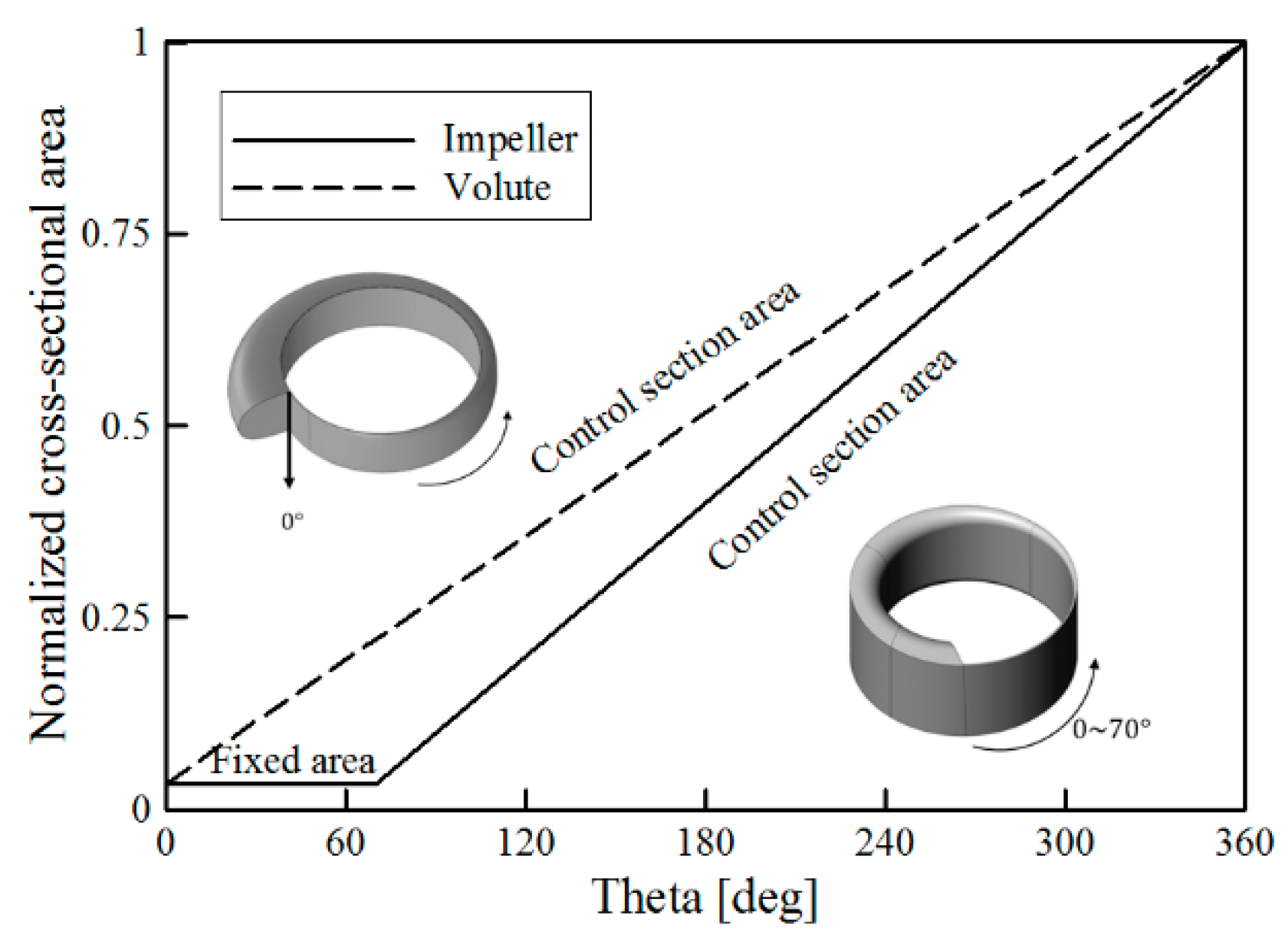
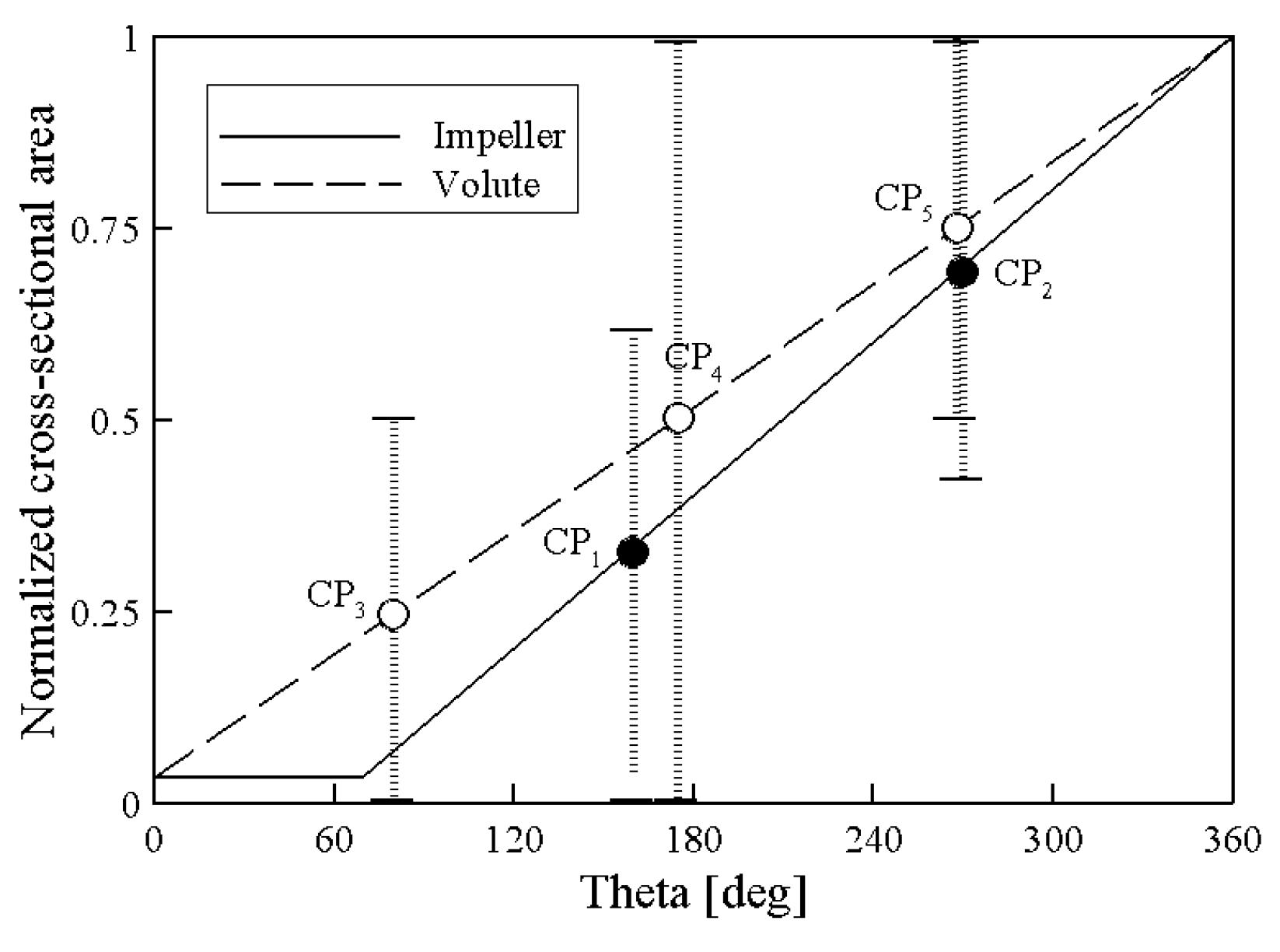
In this study, five geometric parameters associated to the internal flow characteristics of the pump were chosen as design variables to control the cross-sectional area of the volute and impeller. The distribution of the cross-sectional area of the internal flow of impeller and volute can be controlled smoothly by adjusting the control points represented by a third and fourth order Bezier-curve, respectively, as shown in
Figure 5. Hence, the variations in the y-axes for two control points (CP
1 and CP
2) for the impeller and three control points (CP
3, CP
4 and CP
5) for the volute were selected.
Figure 5 shows the defined design variables and ranges are listed in
Table 2.
3.2. Surrogate Modeling
In the present work, 54 design points were generated for the five design variables by LHS using the MATLAB function ‘lhsdesign’ [
27]. LHS is an effective sampling technique that uses an
m ×
n simulation matrix where
m is the number of levels (sampling points) to be examined and
n is the number of design parameters. Each of the
n columns of the matrix containing the levels, 1, 2, …,
m, is randomly paired to form a Latin hypercube. This approach produces random sample points, ensuring that all portions of the design space are represented. The objective function values at these design points were calculated by (U)RANS analysis, as shown in
Table A1 (
Appendix A).
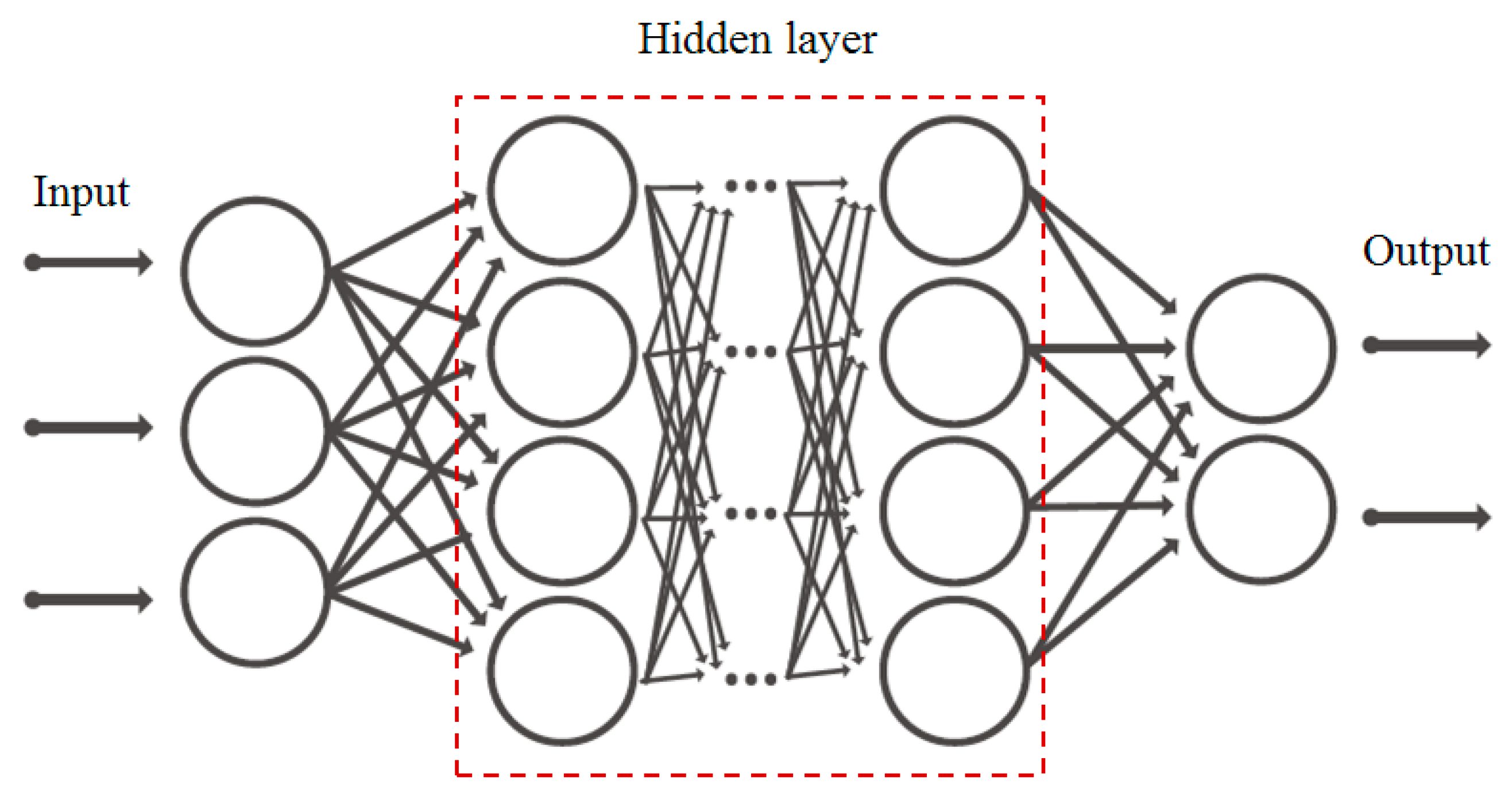
The RBNN model was applied for the surrogate modeling from the objective functions. The RBNN as a neural network model, presented in
Figure 6, consists of a hierarchical structure that starts at the input stage and ends at the output stage, where each stage is known as a layer. There are intermediate layers between the input and output stages, known as hidden layers. By controlling the number and size of these hidden layers, arbitrary complex functions can be learned, and the surrogate models can be constructed. The RBNN includes a two-layered hidden network containing a layer of radial neurons and an output of linear neurons. The hidden layer uses a series of radial primitives to nonlinearly modify the input space to the intermediate space. The output layer then executes a linear combiner to produce the desired target. In this study, MATLAB built-in code ‘radbas’ and ‘newrb’ were used to perform radial basis function-based machine learning [
27]. ‘Newrb’ makes a two-layer network. As mentioned above, the first layer constructed by ‘radbas’ is radial basis neuron network and the second layer is linear neuron network. This combination model
f(x) for the formulation can be represented as a linear combination of a set of N radially-symmetric functions as follow:
where
wj is the weight and
Φj is radial basis function. Machine learning finds the input vector with the largest error in the network and adjusts the weight or neurons of this vector to minimize the error in the network. This process is repeated until the network’s mean squared error falls below the set goal. The construction process can be accessed through graphical user interface (GUI) environment using the application ‘neural net fitting’, which is supported within MATLAB [
27].
In order to construct the RBNN model, an initial value must be assigned to the spread constant (SC), that is, a constant for the first hidden layer (nonlinear function) of the neural network. Because machine learning is based on this initial SC value, it should be chosen carefully.
The network training was implemented by changing the SC values to identify the minimum cross-validation error. The parameters SC
1 and SC
2 are constants that are utilized to configure the surrogate model with respect to the efficiency and radial force, respectively. The SC values were chosen using a k-fold cross-validation test [
28], which is a validation method that estimates how the results of statistical analysis are generalized to independent datasets. The process of the k-fold cross-validation test used in the present work is described as follows:
- Step 1
Construct a surrogate model using the 53 experimental points, except for one point of the 54 experimental points.
- Step 2
Compare the value of the objective function at the location of the experimental point excluded from Step 1 (between CFD simulation value and predicted value by the surrogate model).
- Step 3
This process is carried out at all experimental points. Then, evaluate the sum of the errors between predicted and CFD simulation values.
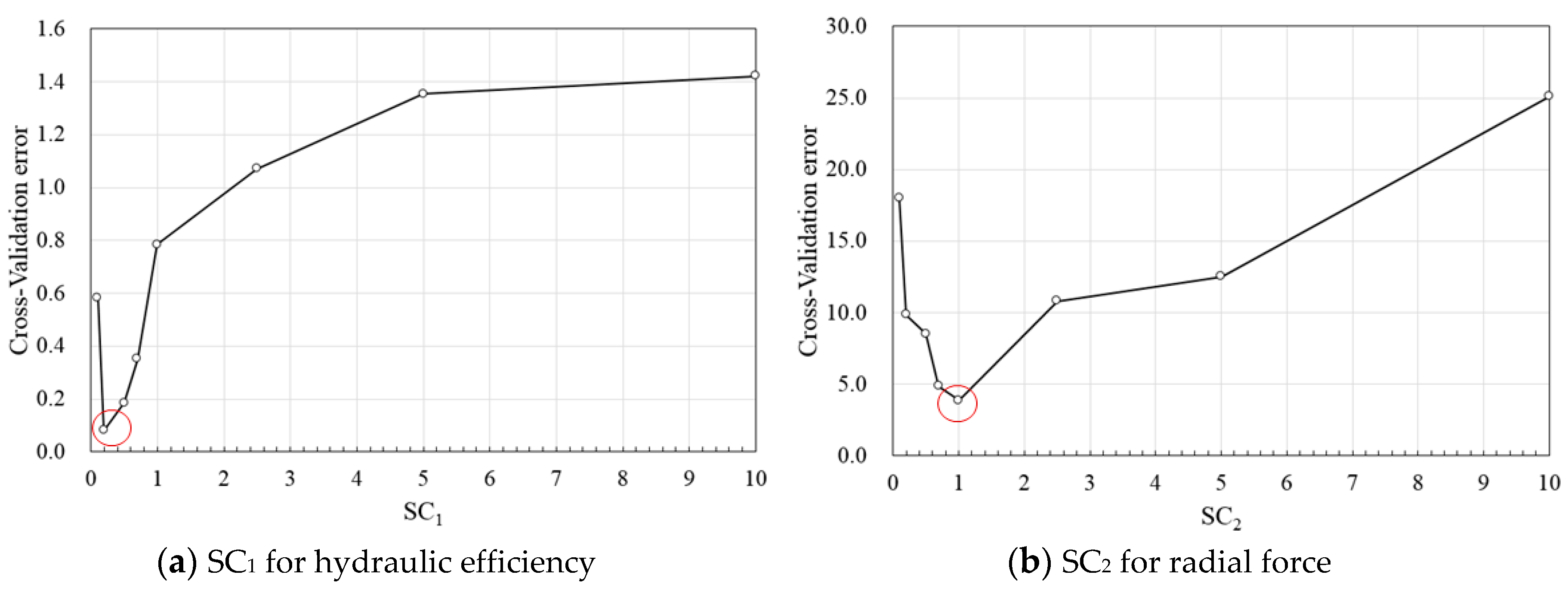
As shown in
Figure 7, the error was minimized when the values of SC
1 and SC
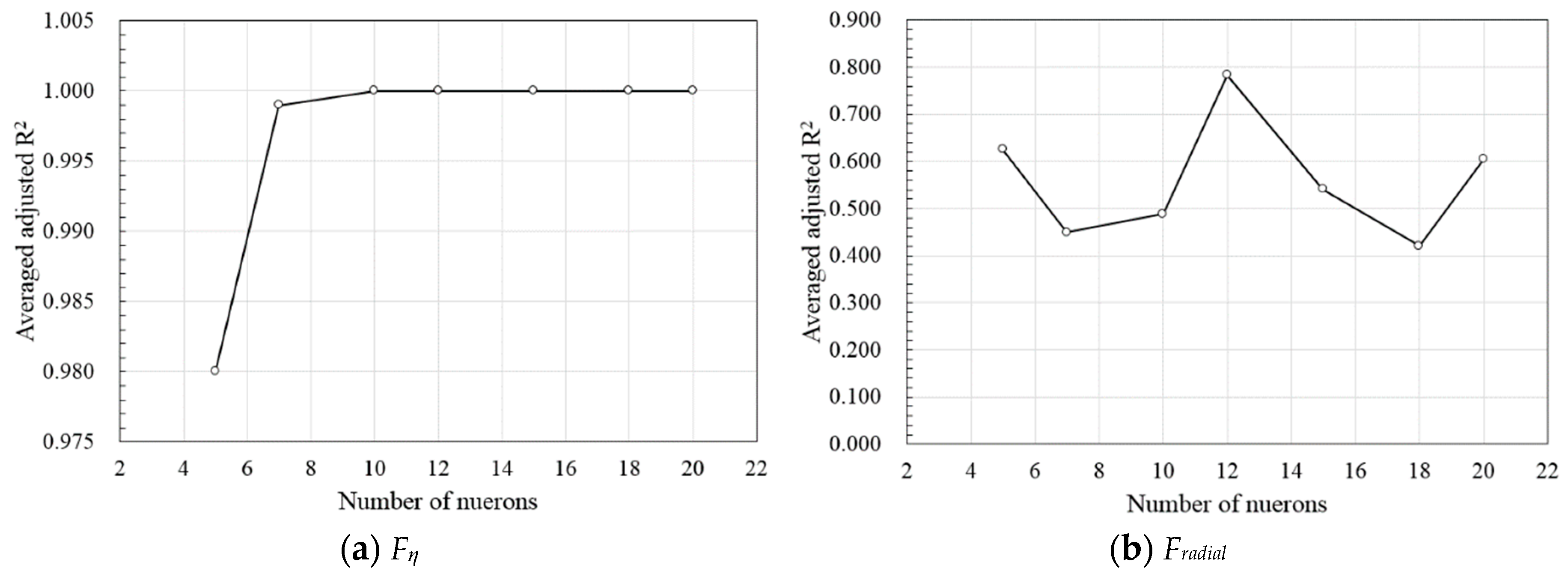
2 were 0.2 and 1.0, respectively. Neural networks with various numbers of neurons were trained 10 times and the averaged adjusted R
2 values are compared (
Figure 8). The same quantity of neurons was used in each layer; when using 12 neurons, the statistically most accurate models with adjusted R
2 equals to 1.00 and 0.78 could be achieved.
3.3. Searching Algorithm
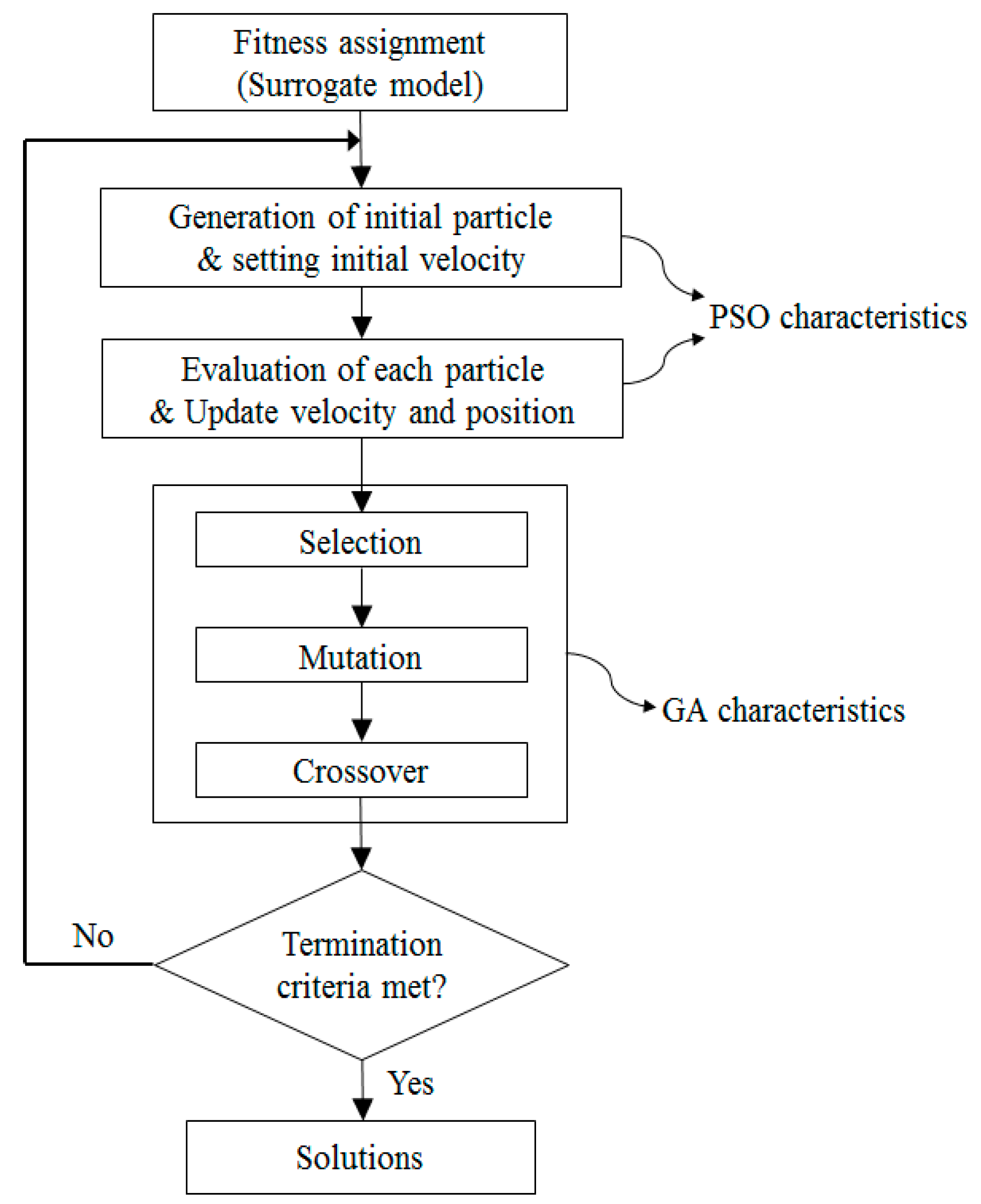
Once the surrogate model is constructed, it is necessary to find the optimal point on the fitness assignment, which is the output in the form of a function of the surrogate model. In the present work, a hybrid PSO-GA algorithm that was most recently developed [
18] was used as searching algorithm to identify a global optimal solution within the fitness assignment. It is known to have a high reliability. Hybrid strategies combine two or more algorithms to maximize the benefits of each algorithm. One benefit of the PSO algorithm is its simplicity and another one is that the PSO algorithm controls the convergence criteria to identify the optimal solution in a short time. The GA, on the other hand, has the advantage of finding the global optimal solution by controlling the genetic search operators—that is, the crossover and mutation rates—which affect the convergence. The locations of the global best particles are updated by the genetic search operators to prevent premature convergence. By using the genetic search operators, the locations of the particles can be exchanged among the particles and thus have the ability to escape the local optima.
The procedure of the hybrid PSO-GA algorithm is represented in
Figure 9 [
15]. This algorithm shares the initial number of particles of the PSO with the number of populations of the GA. The first step of this procedure is to identify an initial optimal solution using the particles of the PSO. The next step is to modify the locations of the particles using the genetic search operators and identify the improved optimal solution. The procedure is competed when the termination criteria are met by referring to the updated location; otherwise, it is repeated. In the present work, the following parameters and termination criteria were used: population size (i.e., number of particles) = 400, crossover fraction = 0.35, mutation fraction = 0.70, generations = 1000, function tolerance = 10
−6, and initial velocity of particles = 2.5. The pseudo-code of the hybrid PSO-GA used in this study is shown in
Table A2 (
Appendix B).
3.4. Optimization Results
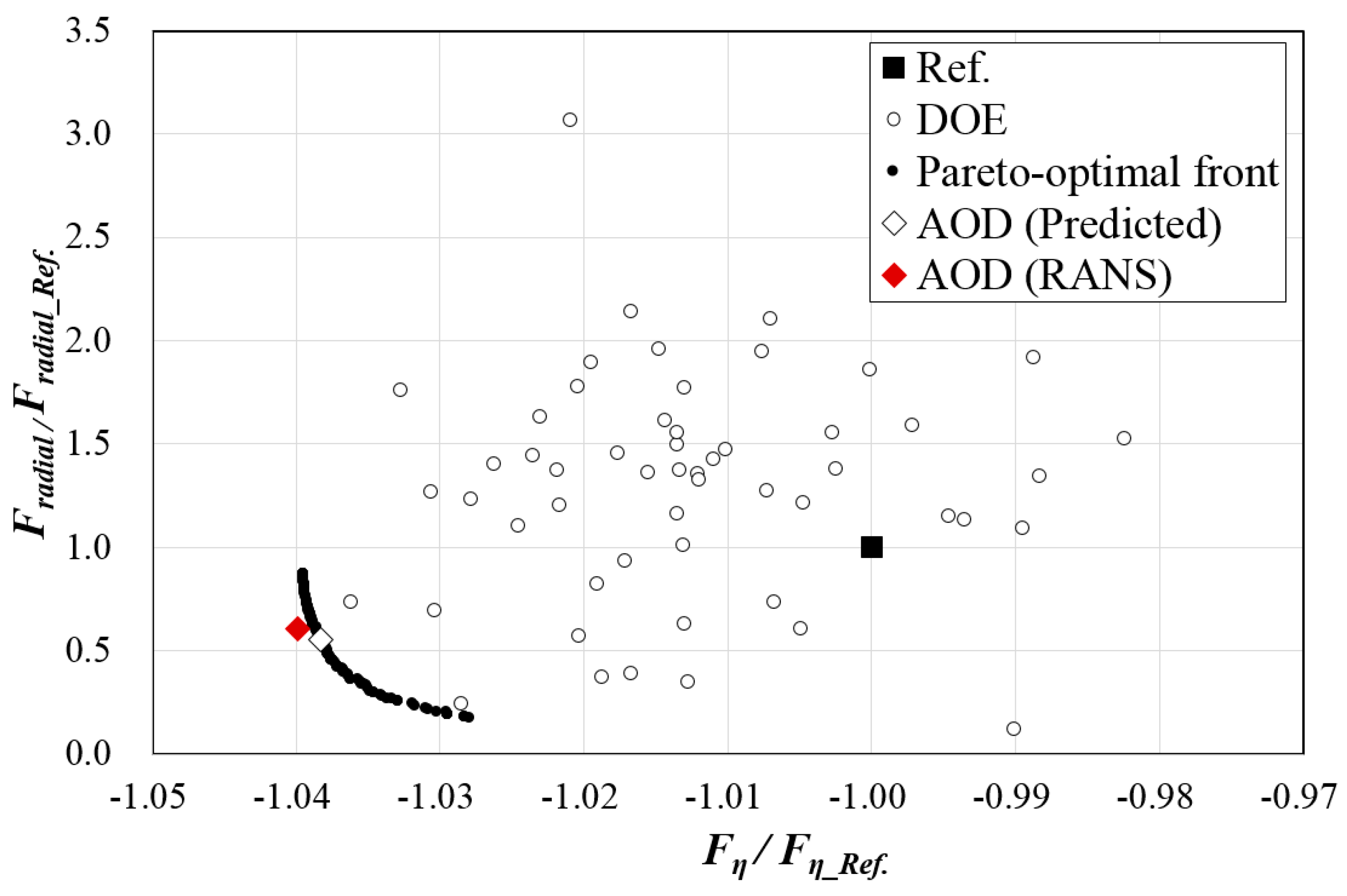
For the optimization, hybrid PSO-GA with RBNN was used to search the Pareto-optimal front in a feasible solution space bounded by the lower and upper bounds of the design variables. Pareto-optimal solutions with the optimum trade-off between the two conflicting objective functions are plotted in
Figure 10.
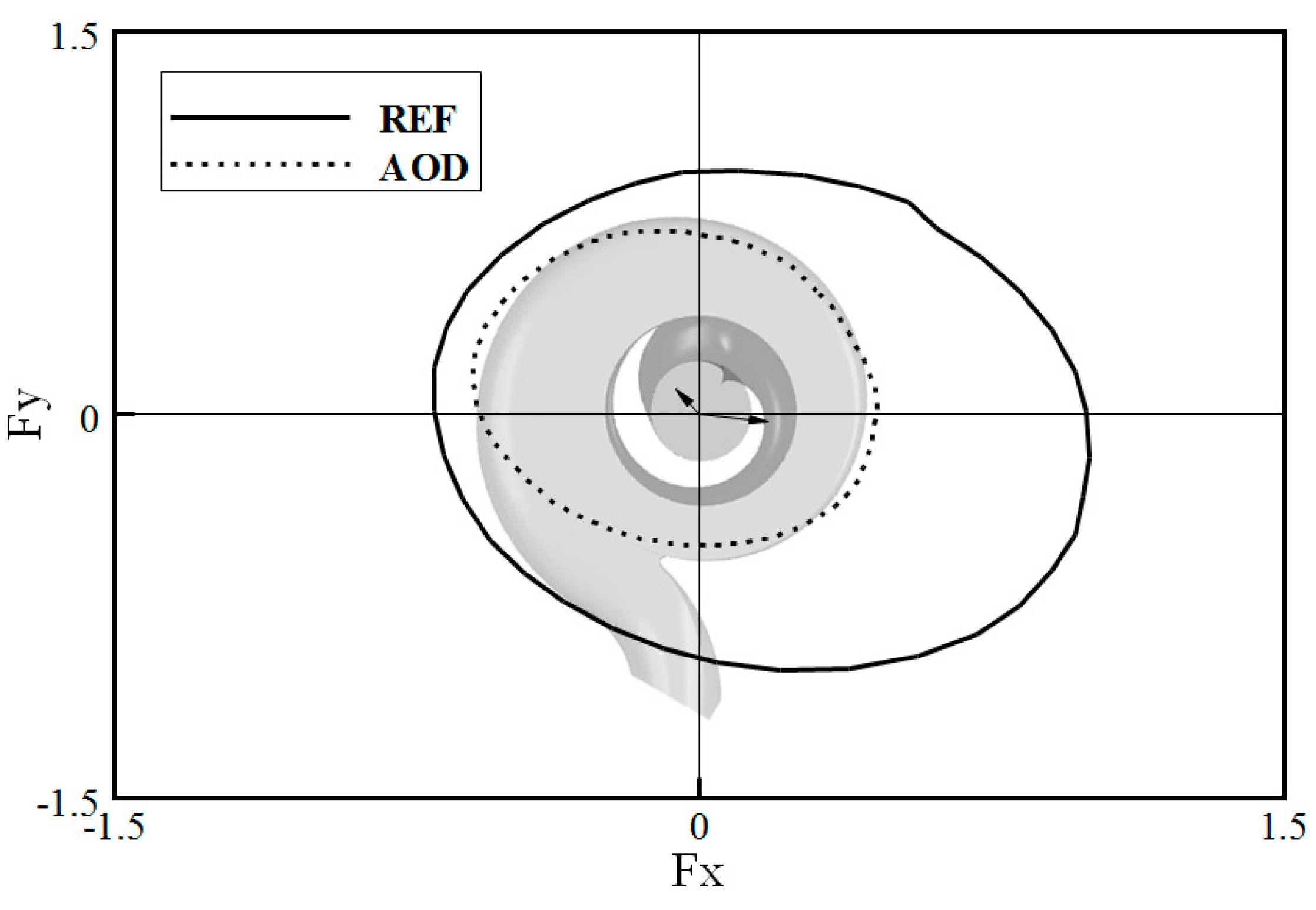
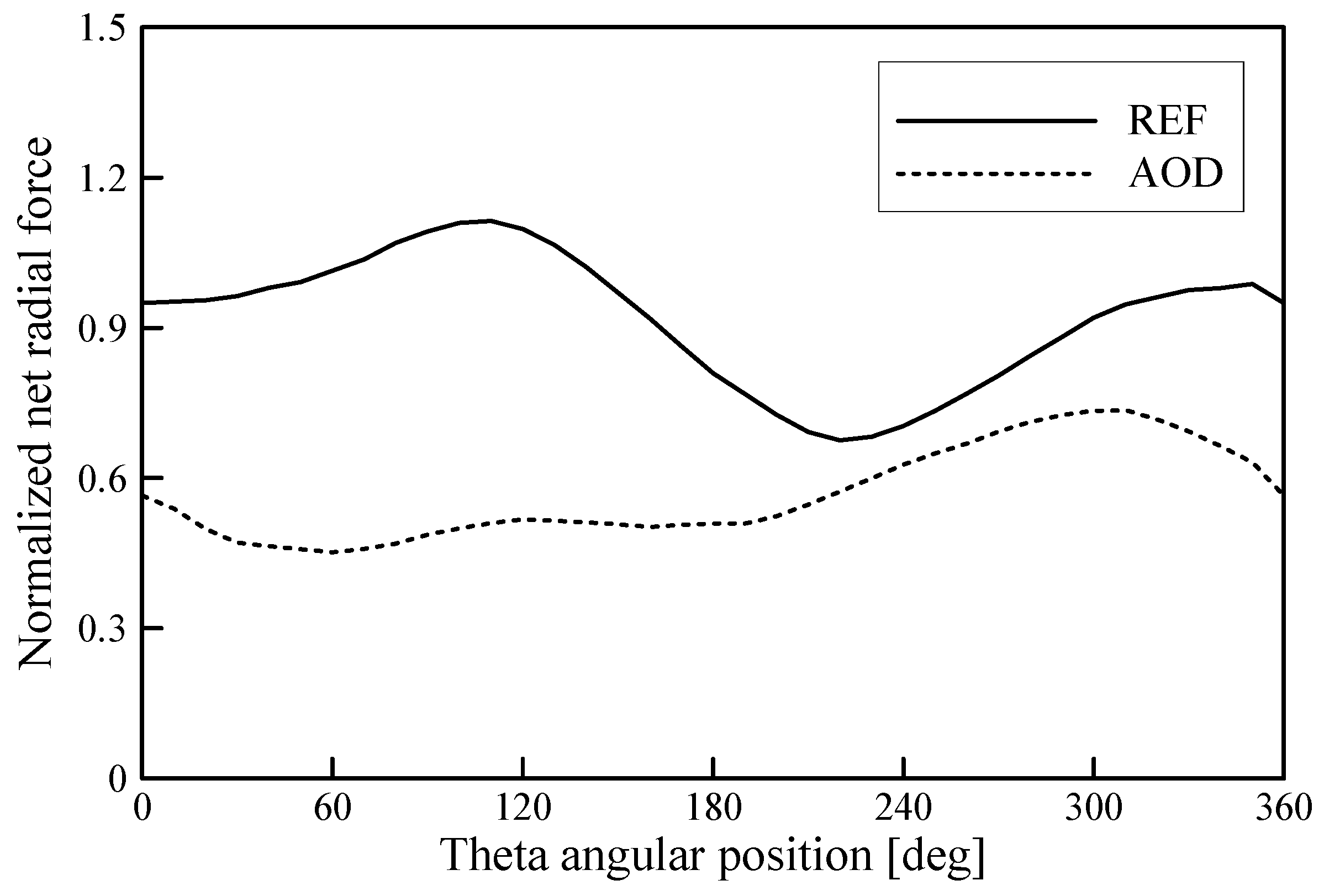
The arbitrary optimum design (AOD) was obtained as the final design near the center of the Pareto-optimal front, to improve the prediction of both the objective functions compared to the reference. The values of the design variables and objective functions of the AOD, along with those for the reference design, are listed in
Table 3. The AOD showed an improvement of 3.07% and 44.80% for the hydraulic efficiency and radial force, respectively, compared with the reference design. In contrast, the relative errors between (U)RANS and the predicted values for these objective functions were 0.16% and 8.77%, respectively.
5. Conclusions
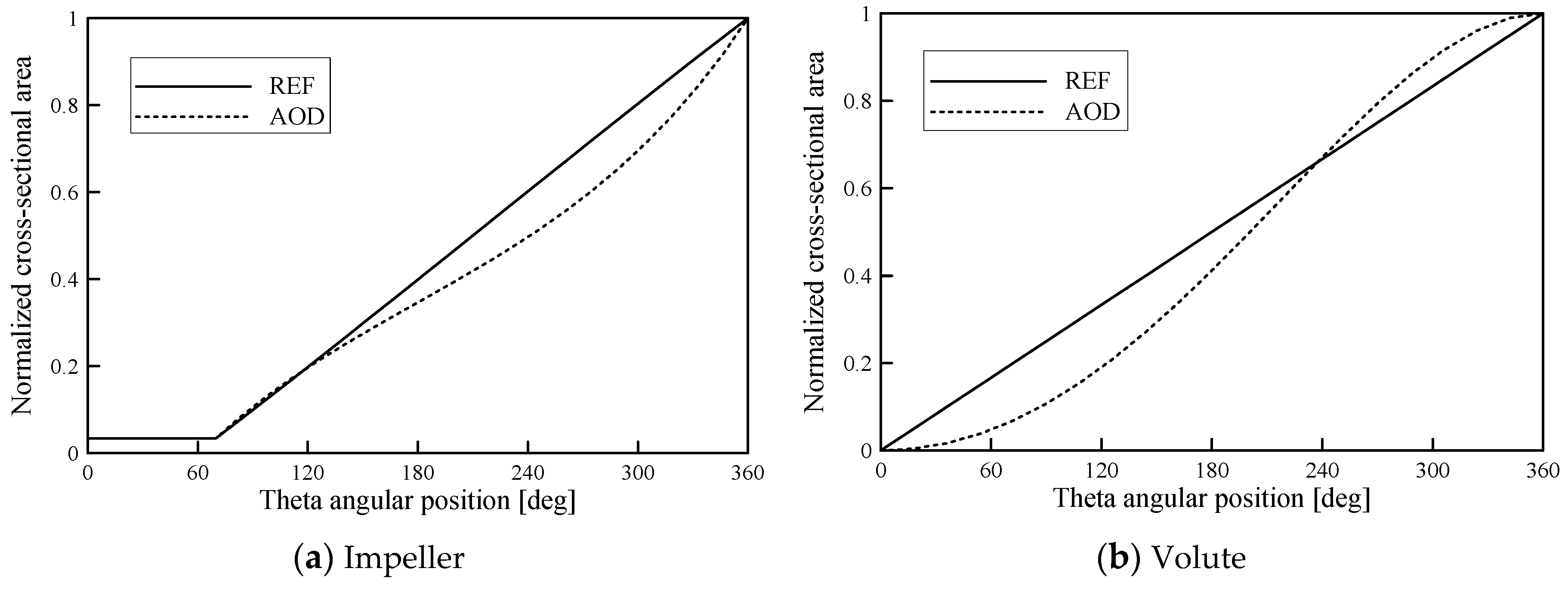
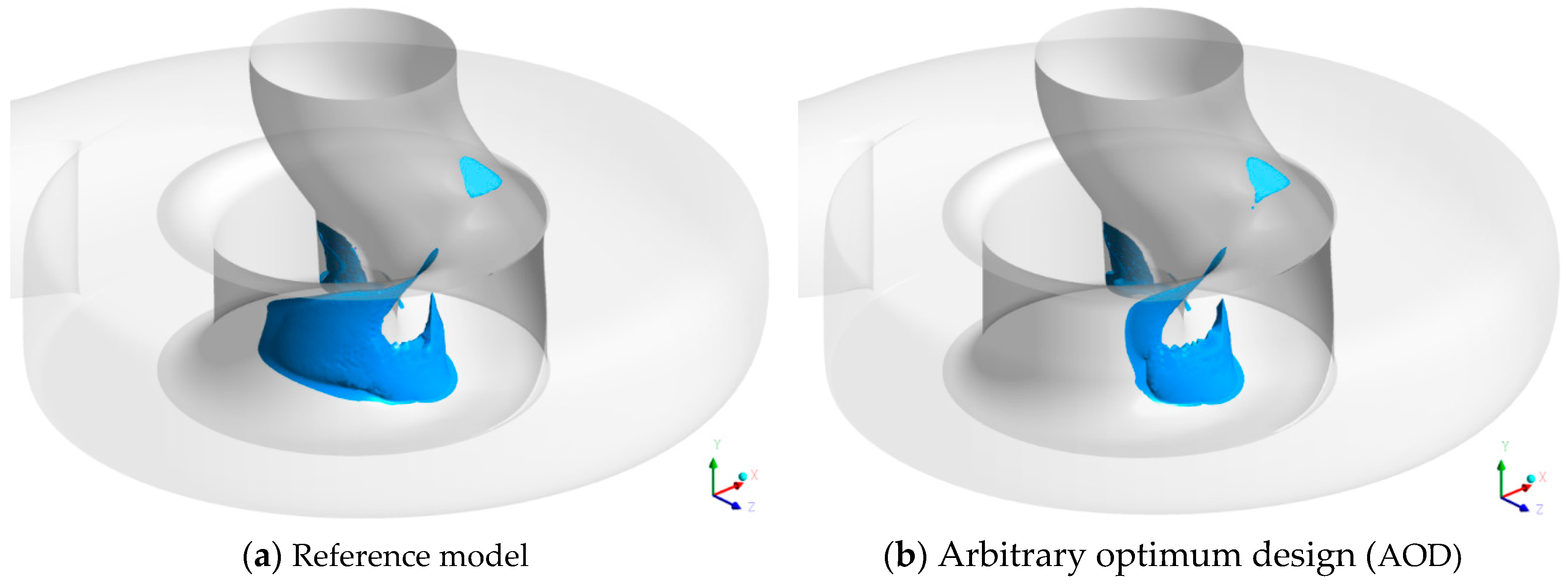
In this study, a multiple optimization technique using hybrid PSO-GA was introduced to effectively enhance the efficiency and radial force sources with fluid-induced vibration of the single-channel pump. 3-D steady and unsteady RANS analyses were performed to investigate the hydraulic characteristics of the single-channel pump using ANSYS CFX-15.0. As the design variables, design parameters for controlling the internal cross-sectional areas of the single-channel impeller and volute were chosen in the authors’ previous study. Two performance functions, i.e., hydraulic efficiency and radial force, were defined as the objective functions. The optimization based on the surrogate model was performed considering reasonable calculation time. The RBNN method was used as a surrogate model, and it was repeatedly constructed 10 times with a different number of neurons constituting the layer for statistical analysis. As a result, when 12 neurons were used, the most accurate surrogate model was constructed. Through optimization with RBNN consisting of 12 neurons, the hydraulic efficiency of the optimum design increased by 3.07%, and the radial force caused by impeller–volute interaction reduced by 44.80%, compared to the reference design.
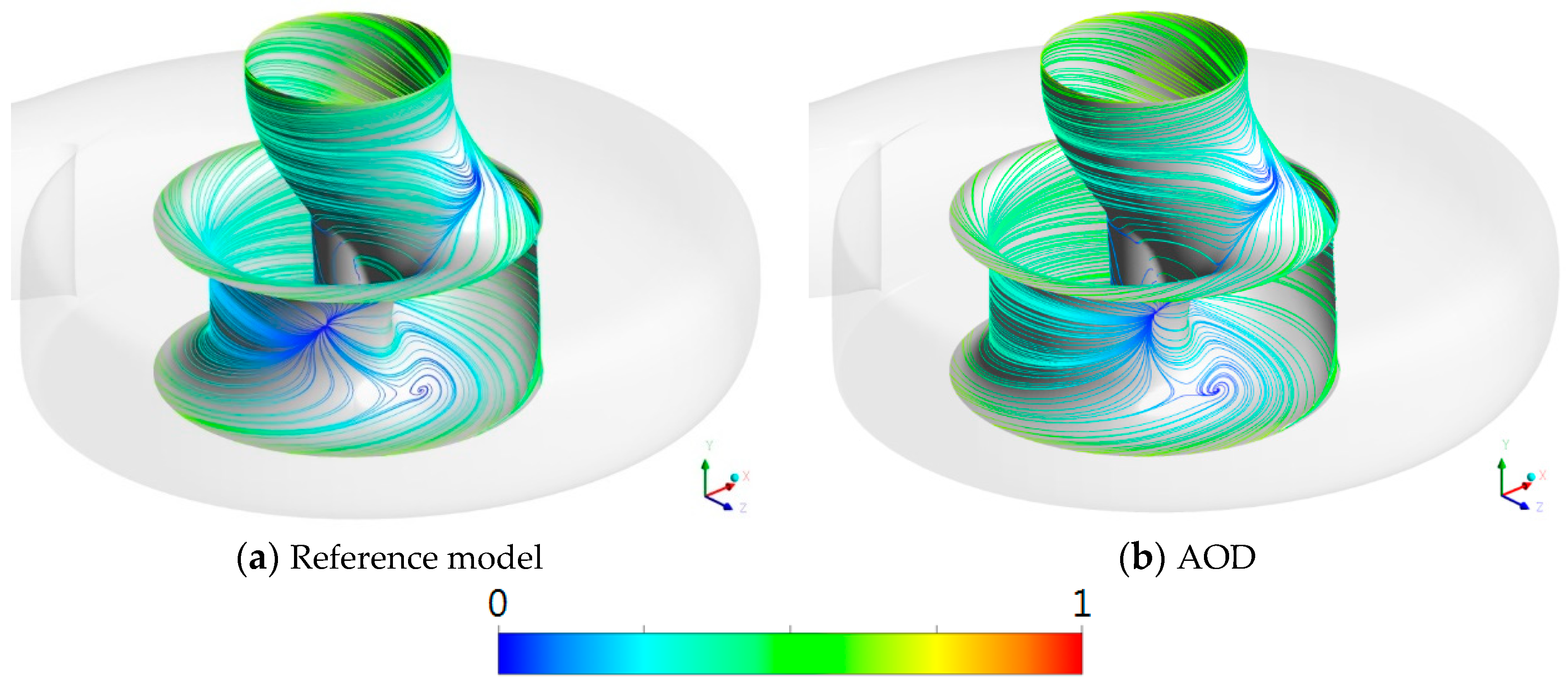
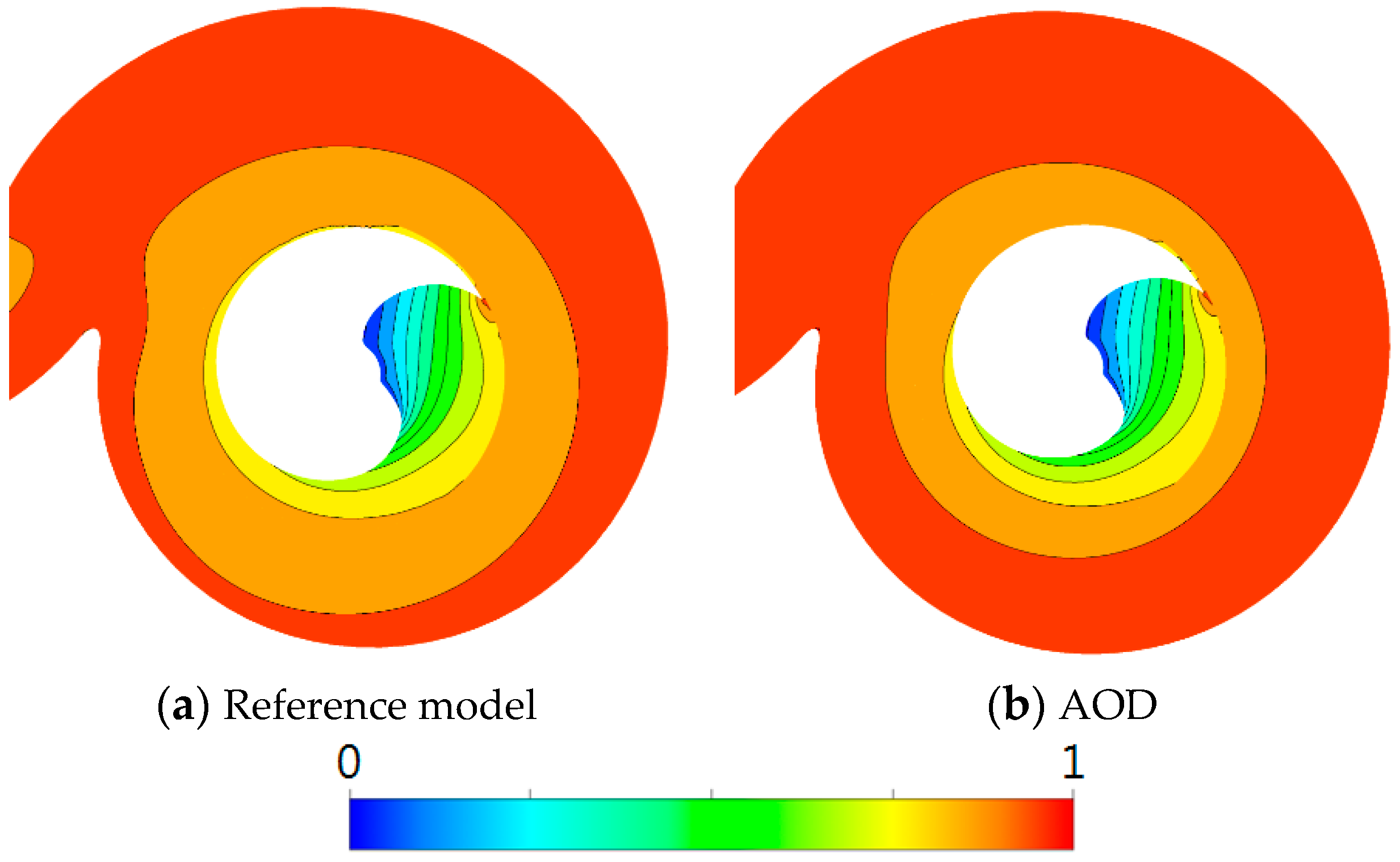
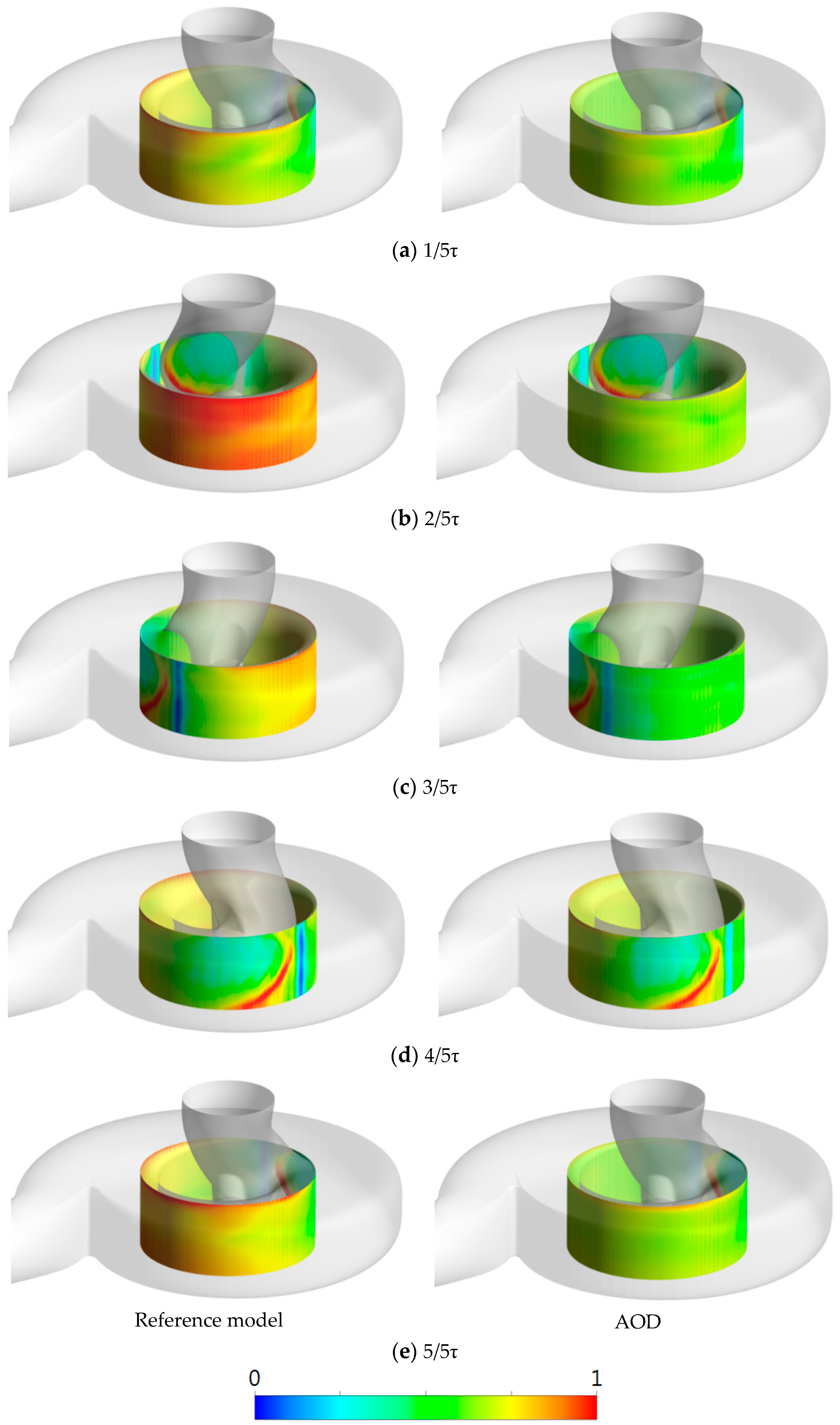
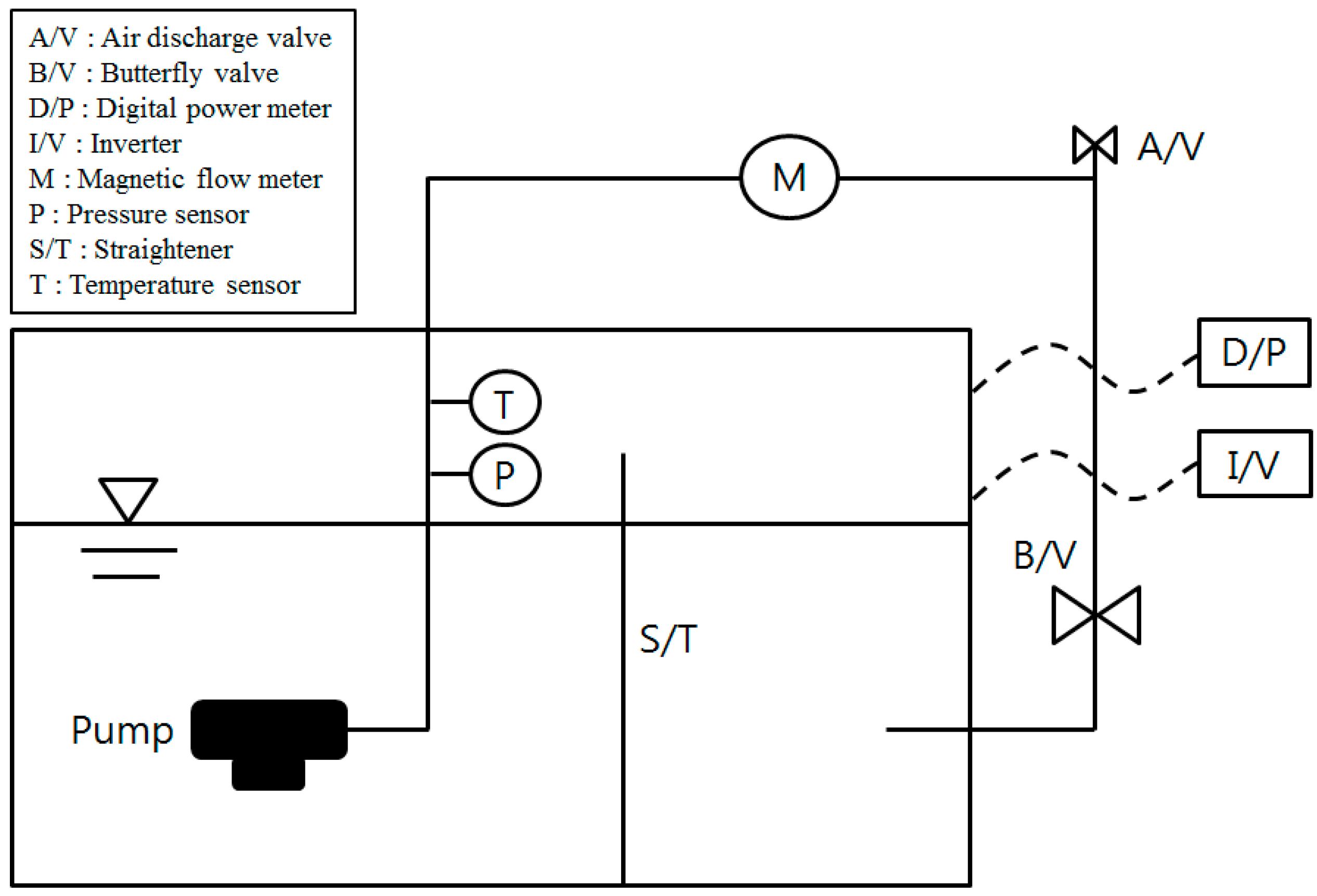
In the optimum design, the flow path in the impeller was narrow in comparison with the reference design. The flow path in the volute upstream of the optimum design was narrowed, while that in the volute downstream was slightly increased, in comparison with the reference design. These structural changes balanced the pressure distribution along the impeller–volute interface and delayed the flow separation on the impeller surface. As a result, it was confirmed through (U)RANS analysis that the fluid-induced vibration of the optimum design reduced in comparison with the reference design. The optimum design obtained in the present study was used to manufacture a prototype model, and the hydraulic performances, i.e., efficiency and head, were verified experimentally. Thus, reasonable results were obtained with the required design specification. However, the precise vibration test was not conducted, and only the vibration values were measured briefly using the simple vibration meter. This is because it was very difficult to simultaneously measure detailed vibration with the hydraulic performances in the experimental apparatus, and there was no submersible three-axis vibration sensor. Therefore, in a future work, the vibration characteristics of the single-channel pump will be investigated in more detail using a three-axis vibration meter, and the flow characteristics including solid wastes will be studied.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















