2.1. Modeling Methodology for the 0.6 m CTWT
In this subsection, the methodology we used to model the 0.6 m CTWT is described in four steps:
Determining the output variables and input variables.
Determining the order of the input variables.
Building the model using a suitable algorithm.
Evaluating the model.
These steps are detailed below.
As introduced before, the goal of wind tunnel control is to make the Mach number stable. In the majority of cases, researchers set the Mach number as the output variable of the model, which can intuitively display the fitting degree of the model. Moreover, changes of the input variables could influence the Mach number, and this can be directly observed, which is beneficial for predictive control and can be achieved using the here established prediction model.
The working condition of a CTWT is affected by multiple indicators. Alterations of these variables could directly influence the output of the CTWT model.
According to the analysis of the aerodynamic structure and process flow of the concerned CTWT, the main control variable of this wind tunnel is the actual compressor speed (Sp). There is an interference quantity, namely, the total pressure in the stable section (Ps). The main controlled variable of the flow field system is the Mach number in the test section (Ma), which is mainly affected by the total pressure in the stable section (Ps) and the static pressure in the test section (Pt). These variables are defined below.
- (1)
Mach number (Ma)
The Mach number is the ratio of the speed of an object to the speed of sound, which is a multiple of the sound velocity, and is a dimensionless number. The Mach number is the controlled variable in this study, and the previous state of the Mach number has a strong correlation with the Mach number in the current state.
The Mach number studied in this project mainly operated in the transonic range.
- (2)
Total pressure (Ps)
The total pressure is the pressure assumed to exist when a gas is stationary in isentropic adiabatic motion and is mainly determined by gas density, temperature, gas constant and pressure. It is measured and recorded in the stable section of a wind tunnel system.
Although the total pressure can be independently debugged and operated in a continuous wind tunnel, there is also a serious coupling phenomenon between the total pressure and the Mach number. During the process of controlling the Mach number with the compressor speed, the total pressure is also constantly changing.
- (3)
Static pressure (Pt)
The static pressure is the normal force of the interaction between the flow layers inside a gas, measured and recorded in the test section of a wind tunnel. Static pressure and total pressure jointly determine the magnitude of the Mach number in a wind tunnel system. In the condition that the total pressure is not artificially changed, the static pressure is an important variable that affects the magnitude of the Mach number.
- (4)
Compressor speed (Sp)
The compressor speed directly controls the stability of the Mach number, and continuous wind tunnels mainly stabilize the Mach number within the control accuracy range by adjusting the speed.
According to the above description, the total pressure (Pt), static pressure (Ps), compressor speed (Sp) and Mach number (Ma) were chosen as the input variables of this model.
- 2.
Determining the orders of the input variables
The order of the variables selected for a model will directly affect the accuracy of prediction. A selected low order can lead to incomplete data information and the inability to accurately predict the Mach number, while a selected excessively high order will lead to information redundancy, which will cause too much noise in the model and prevent achieving a fast control. Therefore, the order of the variables should be determined scientifically through algorithms. The commonly used methods to determine the order of variables include the correlation integral (CI) approach [
23], the singular value decomposition (SVD) approach [
24] and the false nearest neighbor (FNN) approach [
25]. The CI approach needs a large sample size and can be easily influenced by noise. The SVD approach is suitable for linear systems but not for nonlinear systems. The FNN approach measures the ability of original features to interpret category variables. Based on the above considerations, the FNN approach was chosen to determine the order of the variables.
As shown in
Figure 1, when the dimension is 1, points A, B and C seem to be neighbors as a consequence of projecting into a space of smaller dimensions. However, when the dimension reaches 2, point B becomes separated from A and C. The idea of the FNN algorithm is that neighboring points that are squeezed together by low dimensions cease to be neighboring points as the dimensions increase. The FNN algorithm defines these points as false nearest neighbors. For a time series, when all false nearest neighbors disappear, the determined dimension can lead to information that is neither redundant nor deficient, and this dimension is the best dimension.
The details of the FNN algorithm are as follows.
For the sample data that are known as
the calculation of the FNN algorithm can be achieved by the following two methods:
- (1)
Find the nearest neighbor in N-dimensional space to make minimum:
Judge if the following description is true:
where
R is defined as the critical value, set between 10 and 50, generally 10. If the above formula is false, then the point is a false nearest neighbor.
- (2)
Increase the dimensions of
and
by 1 and calculate
:
Judge if the following description is true:
where
R is defined as the critical value, set between 10 and 50, generally 10. If the above formula is false, then the point is a false nearest neighbor.
As long as one of the above two judgements is false, the point can be considered as a false nearest neighbor. Judge every moment k, calculate the percentage of all moments with pseudo-neighbor points, change the value of n and continue to judge until the inflection point of the percentage decline is found. At this time, n is the best variable order.
- 3.
Building the model using a suitable algorithm
Considering the time delay of the system, both current and previous states of the above variables are supposed to be input variables. For the modeling of time series, the NARX model [
26,
27] is most commonly used in the industry. It has the characteristics of memory feedback, can increase the dynamic learning ability and can keep the system output delay and feedback to the input.
The basic structure of the NARX model is as follows:
where
express the historical output sequence of the model,
express the historical input sequence of the model,
i is the type number of the input variables, and
f is the fitting function of the NARX model.
In the selection of the fitting function, the BP network [
28] stands out with its strong nonlinear mapping ability, good fault tolerance ability and strong adaptive ability and becomes the best option for the nonlinear fitting function.
According to the above descriptions, a 0.6 m CTWT modeling method was obtained. The previous states of Pt, Ps, Sp and Ma were selected as input variables, aiming to predict the Mach number at the next moment. The FNN algorithm was used to determine their orders. Once the order was determined, the data was introduced into the NARX-BP-based prediction model to obtain the prediction result.
- 4.
Evaluating the model
When a model is established, evaluation indicators are supposed to be utilized. Generally, the RMSE is selected to evaluate the prediction of the Mach number. The RMSE measures the deviation between the predicted value and the real value as shown below:
where
is the real wind tunnel output,
is the model predicted value, and
n is the number of sampling points. The smaller the RMSE value is, the more accurate the prediction of the model is.
Moreover, the MD is introduced to estimate the maximum prediction deviation between the actual value and the predicted value in the whole prediction process. It can be calculated by
If the MD is too large, the control method will need further improvement.
These two evaluation indicators have different significance. A low RMSE indicates high stability and accuracy of prediction, while the MD represents the maximum error that the system can support. The project requires an RMSE of less than 0.001 of and an MD of less than 0.001.
In conclusion, the establishment process of the FNN-NARX-BP Mach number prediction model for a single working condition is shown in
Figure 2.
2.2. Modeling Methodology for the 2.4 m CTWT
The previous section discussed a set of modeling methods for a 0.6 m CTWT. However, the FNN-NARX-BP method is based on the assumption that a large amount of experimental data can be used to build the prediction model. Usually, very few data are available to establish a precise prediction model for a new process. Moreover, though some working conditions are similar, directly using a former condition’s model to predict the Mach number of the new condition will lead to some prediction errors. In other cases, a new wind tunnel has just been built, whose physical characteristics are similar to those of a wind tunnel with an established prediction model. In view of the fact that a single wind tunnel experiment requires a large amount of money and resources, it is uneconomical and unnecessary to rebuild an all-new prediction model in the above cases. To meet the modeling requirements, a new approach is proposed in this paper, which aims to utilize both the established model of the 0.6 m CTWT and few experimental data of the 2.4 m CTWT to build a description model of the 2.4 m CTWT.
In this subsection, the methodology used to model the 2.4 m CTWT is described in three steps:
Determining the migration algorithms.
Determining the intelligence algorithms to obtain the best migration coefficients.
Identifying the parameters that will be migrated.
These steps are detailed below.
How to use a small amount of new working condition data to correct the basic model and obtain a new model is a problem worth solving. Many studies have been conducted on this topic.
Section 1 introduced some model migration algorithms. Among these algorithms, the IOSBC model based on the shift and scaling of the historical process proposed by Gao F.R. and Lu J.D. [
21] and used in certain applications [
22] attracted the attention of the authors. This method is widely used in model migration due to its advantages of simple structure, requirement of less samples and easy combination with other algorithms.
The basic implementation steps of the IOSBC algorithm are as follows.
In the simplest case, a new process is a shift and scaling of an old process. The previous model for any form is as follows:
where
and
are the inputs and outputs of the basic model, respectively, and
is any nonlinear function to describe the old process. If there exists a shift and scaling in the input and output space,
and
should be transformed into those of the old process,
and
, by a slope and bias correction:
where
and
denote the scaling and shift of the old process in the input space, and
and
denote the scaling and shift of the old process in the output space. Thus, the new model is described by the new equation below:
Through the optimization algorithm, a small amount of known data under the new working condition are introduces, and the following equations are optimized to obtain the optimization parameters:
- 2.
Determining the intelligence algorithms to obtain the best migration coefficients
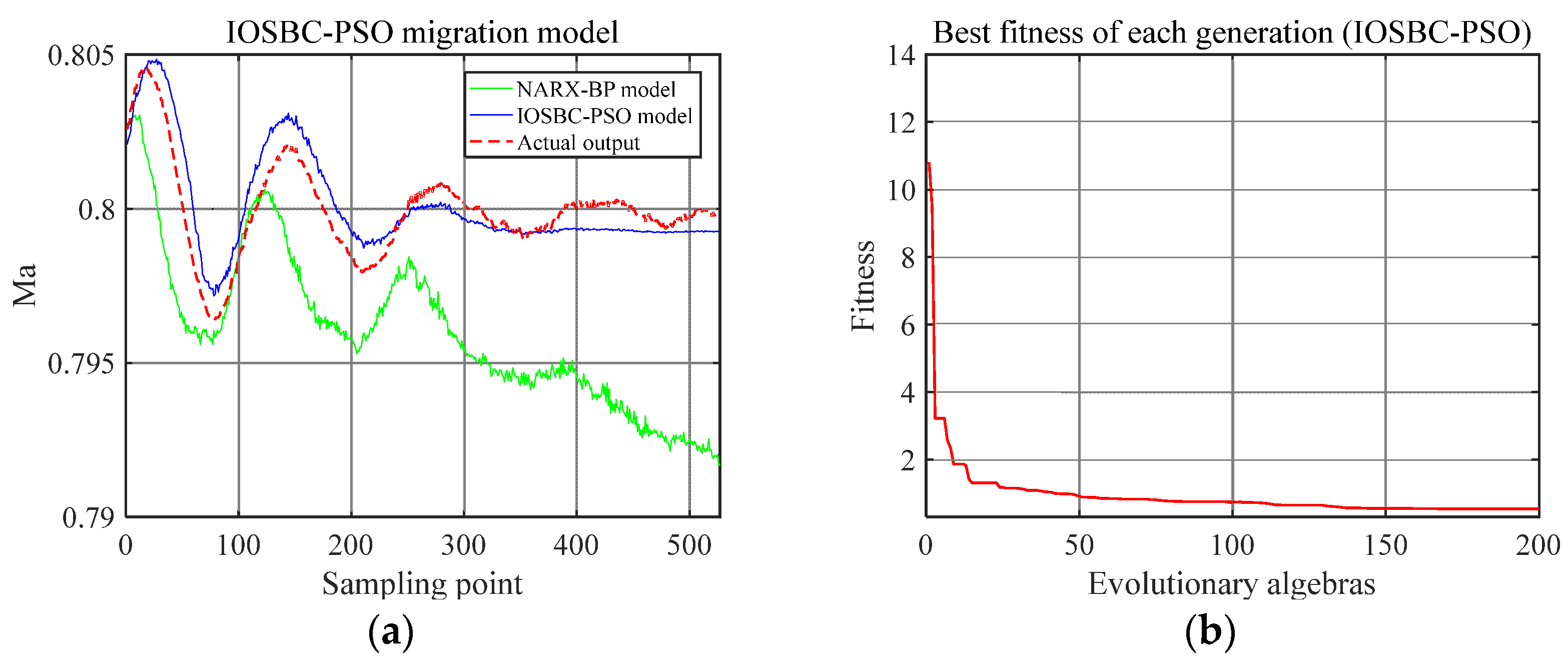
As a global optimization algorithm among intelligent optimization algorithms, particle swarm optimization (PSO) can iteratively optimize the parameters of the IOBSC algorithm to find the optimal solution; so, the IOSBC-PSO algorithm was developed in this paper to achieve a better migration of the basic model according to a small amount of data under the new working conditions.
Particle Swarm Optimization (PSO) is a metaheuristic optimization technique inspired by the social behavior of bird flocking or fish schooling. It was first introduced by Kennedy and Eberhart in 1995 [
29].
In PSO, a set of particles moves around in a search space to find the optimal solution. Each particle represents a potential solution to the problem being solved. The position of each particle is influenced by its own best-known position as well as by the best-known position among all particles in the swarm. The velocity of each particle is also updated using these two positions.
The algorithm works iteratively, with each iteration consisting of updating the positions and velocities of all particles in the swarm. This process continues until a stopping criterion is met, such as reaching a maximum number of iterations or achieving a desired level of fitness.
PSO has been used to solve a wide range of optimization problems, including function optimization, feature selection, clustering and neural network training. It is known for its simplicity, fast convergence, and ability to find good solutions in high-dimensional search spaces.
The general steps of the PSO algorithm are as follows [
28,
29,
30]:
Initialize a swarm of particles with random positions and velocities in the search space.
For each particle, evaluate its fitness value based on its current position.
Update the particle’s best-known position (pbest) if its current fitness value is better than its previous pbest.
Determine the global best-known position (gbest) among all particles in the swarm.
Update the velocity and position of each particle using the following equations:
where
is the speed of the particle
at time
,
is the inertia weight,
is the cognitive component,
is the social component,
and
are the optimal locations of individuals or the whole population, and
is the position of the particle
at time
.
The inertia weight controls the impact of the particle’s current velocity, the cognitive component controls the particle’s memory of its own best-known position, and the social component controls the particle’s interaction with the swarm.
- 6.
Repeat steps 2–5 until a stopping criterion is met (e.g., maximum number of iterations or desired level of fitness).
The search of each bird in PSO is directional, while the mutation in the genetic algorithm (GA) is random. To some extent, PSO is more efficient than the GA. Moreover, the calculation required by the GA is far greater than that of PSO. In terms of computing effect, PSO is better at dealing with the continuous changes of the variables than the GA [
31].
- 3.
Identifying the parameters that will be migrated
Here, we describe the process of model migration of the NARX-BP model established using the IOSBC-PSO method:
The structure of the model is:
where
where
is the Mach number normalized,
is the link weight matrix between the input layer and the hidden layer,
is the threshold matrix of each neuron in the hidden layer,
is the link weight matrix between the hidden layer and the output layer, and
is the threshold matrix of each neuron in the output layer.
is the activation function between the input layer and the middle layer, and
is the activation function between the middle layer and the output layer.
The IOSBC algorithm is used for parameter migration of the optimal weight of each threshold matrix mentioned above. The matrix after the migration is as follows:
The increased migration coefficients are obtained by the PSO algorithm.
The new model obtained by model migration is:
where
and
are the optimal matrixes of the model transfer coefficients obtained by the PSO algorithm.
The predicted Mach number of the new working condition can be obtained after the output of the prediction model is de-normalized.
In conclusion, the flow chart showing the use of the IOSBC-PSO method to migrate the NARX-BP model of wind tunnel flow field is shown in
Figure 3.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}