

Surface Crack Detection of Steel Structures in Railroad Industry Based on Multi-Model Training Comparison Technique
Abstract
:1. Introduction
1.1. What Is Steel Structure
1.2. Effect of Cracks on Steel
1.3. Current Crack Detection Research and Comparison
2. Preparation Materials and Identification Methods
2.1. Material Preparation
2.2. Steel Crack Identification Method
3. Neural Network Model
3.1. Model Introduction
3.2. Model Improvement
4. Model Evaluation Parameter Criteria
5. Comparative Study of Model Characteristics
5.1. Research Perspective
5.2. Data Description and Analysis
6. Conclusions and Outlook
6.1. Conclusions
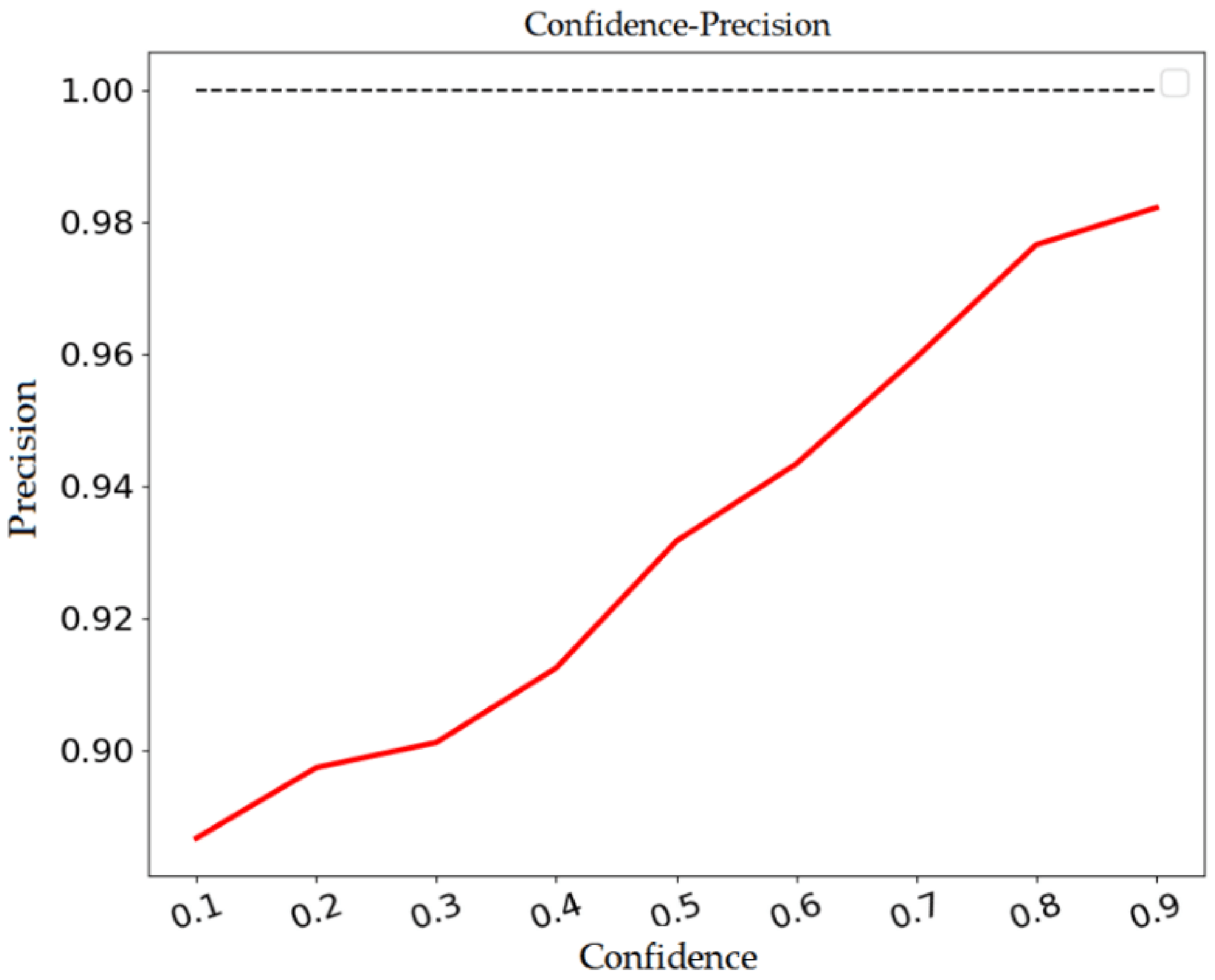
- All three neural network models can effectively identify steel surface cracks with accuracy and trade-off accuracy higher than 97.5%, and the confidence level when the trade-off accuracy reaches the peak is higher than 0.6.
- The Yolov5 model has better recognition ability under the training of large datasets, and the VGG16 model can extract the detailed features of the image more accurately and reduce the interference of noise effectively.
- The C-Alex model is able to extract image features faster than the other two models under the training conditions with a small sample size of the datasets and shows a higher transfer efficiency of the features.
- The artificial intelligence steel crack detection method, which uses the grayscale value set performance state and the grayscale difference threshold as the basis for judgment, significantly reduces the parameter content, shortens the calculation time, and improves the data transfer efficiency. Test experiments prove that this method can effectively detect steel surface cracks.
6.2. Outlook
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cheng, F.; Wang, W.; Qiu, C.X.; Hu, S.; MacRae, G.A.; Eatherton, M.R. Seismic resilient steel structures: A review of research, practice, challenges and opportunities. J. Constr. Steel Res. 2022, 191, 107172. [Google Scholar] [CrossRef]
- Wang, Y.; Yuan, L.C.; Zhang, S.J.; Sun, C.; Wang, W.; Yang, G.; Li, Q.; Wei, Y. The influence of combined gradient structure with residual stress on crack-growth behavior in medium carbon steel. Eng. Fract. Mech. 2019, 209, 369–381. [Google Scholar] [CrossRef] [Green Version]
- Manios, E.; Pissas, M. A new cracks detection device for magnetic steels. EPJ Web Conf. 2014, 75, 6013. [Google Scholar] [CrossRef] [Green Version]
- Pascoe, J.A.; Zarouchas, D.S.; Alderliesten, R.C.; Benedictus, R. Using acoustic emission to understand fatigue crack growth within a single load cycle. Eng. Fract. Mech. 2018, 194, 281–300. [Google Scholar] [CrossRef] [Green Version]
- Thomas, H.M.; Heckel, T.; Hanspach, G. Advantage of a combined ultrasonic and eddy current examination for railway inspection trains. OR Insight 2007, 49, 341–344. [Google Scholar] [CrossRef]
- Ketelaere, B.D.; Wouters, N.; Kalfas, L.; van Belleghem, R.; Saeys, W. A fresh look at computer vision for industrial quality control. Qual. Eng. 2022, 34, 152–158. [Google Scholar] [CrossRef]
- Cheng, F. Research on Pavement Crack Detection Based on Computer Vision; Beijing Jiaotong University: Beijing, China, 2018. [Google Scholar]
- Ding, S.Y. Analysis and prevention of cracks in t-beam of post tensioned France railway. Sci. Technol. Inf. 2014, 9, 276–277. [Google Scholar]
- Mathews, R.P.; Panicker, M.R.; Hareendranathan, A. vid-SAMGRAH: A PyTorch framework for multi-latent space reinforcement learning driven video summarization in ultrasound imaging. Softw. Impacts 2021, 10, 100185. [Google Scholar] [CrossRef]
- Akhmatovich, K.; Turakulovich, K.Z.; Zokir, I.S.u.; Husniya, S. Normalization of facial occlusion in face recognition. Int. J. Innov. Technol. Explor. Eng. (IJITEE) 2019, 8, 2523–2527. [Google Scholar] [CrossRef]
- Hassan, M.; Shaikh, M.S.; Jatoi, M.A. Image quality measurement-based comparative analysis of illumination compensation methods for face image normalization. Multimed. Syst. 2021, 28, 511–520. [Google Scholar] [CrossRef]
- Chen, X.L.; Lian, Q.W.; Chen, X.L.; Shang, J. Surface crack detection method for coal rock based on improved YOLOv5. Appl. Sci. 2022, 12, 9695. [Google Scholar] [CrossRef]
- Yang, Z.; Li, L.; Luo, W.T. PDNet: Improved YOLOv5 Nondeformable disease detection network for asphalt pavement. Comput. Intell. Neurosci. 2022, 2022, 5133543. [Google Scholar] [CrossRef]
- Xu, Q.Q.; Zhu, Z.Y.; Ge, H.L.; Zhang, Z.; Zang, X. Effective face detector based on YOLOv5 and superresolution reconstruction. Comput. Math. Methods Med. 2021, 2021, 7748350. [Google Scholar] [CrossRef]
- Deng, T.M.; Liu, X.H.; Mao, G.T. Improved YOLOv5 based on hybrid domain attention for small object detection in optical remote sensing images. Electronics 2022, 11, 2657. [Google Scholar] [CrossRef]
- Chen, K.; Wang, S.; Cao, H. A new artificial intelligence recognition technology based on convolutional neural networks. In Proceedings of the 2022 IEEE 23rd International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), Belfast, UK, 4–17 June 2022; pp. 515–520. [Google Scholar] [CrossRef]
- Wu, R.; Li, S.; Du, D.; Liu, W. Patent Application, Processing Method and Apparatus for Single-Channel Convolution Layer, and Processing Method and Apparatus for Multi-Channel Convolution Layer, for Approval (USPTO 20150371359). USPTO 20150371359, 24 December 2015. [Google Scholar]
- Ai, T.; Shi, J.F.; Xiang, W. Application of the improved AlexNet model in the detection of glass shell defects. Manuf. Autom. 2020, 42, 54–56+60. [Google Scholar]
- Li, C.; Wang, Q.; Liu, X.B.; Hu, B. An attention-based CoT-ResNet with channel shuffle mechanism for classification of alzheimer’s disease levels. Front. Aging Neurosci. 2022, 14, 930584. [Google Scholar] [CrossRef]
- Ma, Z.Y.; Chang, D.L.; Li, X.X. Channel max pooling layer for fine-grained vehicle classification. arXiv 2019, arXiv:1902.11107. [Google Scholar]
- Qu, Z.J.; Yuan, S.G.; Chi, R.; Chang, L.C.; Zhao, L. Genetic optimization method of pantograph and catenary comprehensive monitor status prediction model based on Adadelta deep neural network. IEEE Access 2019, 7, 23210–23221. [Google Scholar] [CrossRef]
- Yue, X.C.; Liu, Q.C. Improved FunkSVD algorithm based on RMSProp. J. Circuits Syst. Comput. 2022, 31, 2250139. [Google Scholar] [CrossRef]
- Zeiler, M.D. ADADELTA: An adaptive learning rate method. arXiv 2012, arXiv:1212.5701. [Google Scholar]
- Lv, J.X.; Yan, L.J.; Chu, S.C.; Cai, Z.-M.; Pan, J.-S.; He, X.-K.; Xue, J.-K. A new hybrid algorithm based on golden eagle optimizer and grey wolf optimizer for 3D path planning of multiple UAVs in power inspection. Neural Comput. Appl. 2022, 34, 11911–11936. [Google Scholar] [CrossRef]
- Abdeljawad, A.; Grohs, P. Integral representations of shallow neural network with rectified power unit activation function. Neural Netw. 2022, 155, 536–550. [Google Scholar] [CrossRef] [PubMed]
- Njima, W.; Zayani, R.; Ahriz, I.; Terre, M.; Bouallegue, R. Beyond stochastic gradient descent for matrix completion based indoor localization. Appl. Sci. 2019, 9, 2414. [Google Scholar] [CrossRef] [Green Version]
- Matore, M.E.E.M. Rasch model assessment for bloom digital taxonomy applications. Comput. Mater. Contin. 2021, 68, 1235–1253. [Google Scholar] [CrossRef]
- An, F.P.; Liu, J.E. Pedestrian re-identification algorithm based on visual attention-positive example generation network deep learning model. Inf. Fusion 2022, 86–87, 136–145. [Google Scholar] [CrossRef]
- Zachary, D.; Locke, E.; Hoda, M.; Moravek, D.; Phan, K.; Stratton, A.; Kingwell, S.; Wai, E.K.; Phan, P. Using a national surgical database to predict complications following posterior lumbar surgery and comparing the area under the curve and F1-score for the assessment of prognostic capability. Spine J. 2021, 21, 1135–1142. [Google Scholar] [CrossRef]
- AlBeladi, A.A.; Muqaibel, A.H. Evaluating compressive sensing algorithms in through-the-wall radar via F1-score. Int. J. Signal Imaging Syst. Eng. 2018, 11, 164–171. [Google Scholar] [CrossRef]
- Chen, H.; Bohush, S.I.R.; Ablameyko, S. Choice of activation function in convolutional neural networks for person re-identification in video surveillance systems. Program. Comput. Softw. 2022, 48, 312–321. [Google Scholar] [CrossRef]
- Peng, C.J.; Li, T.T.; Hou, Y.R.; Xu, H.M. Research status and development trends of crack recognition based on machine learning. Sci. GuangXi 2021, 28, 215–228. [Google Scholar] [CrossRef]
- Baldassarre, G.; Santucci, V.G.; Cartoni, E.; Caligiore, D. The architecture challenge: Future artificial-intelligence systems will require sophisticated architectures, and knowledge of the brain might guide their construction. Behav. Brain Sci. 2017, 40, e254. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Batch | Initial Learning Rate | Optimizer | Training Cycles |
|---|---|---|---|---|
| Yolov5 | 16 | 0.01 | SGD | 100 |
| VGG16 | 16 | 0.01 | RMSProp | 100 |
| C-Alex | 16 | 0.01 | AdaDelta | 100 |
| Model | Precision | Accuracy | Recall | F1-Score | Confidence Score |
|---|---|---|---|---|---|
| Yolov5 | 0.9875 | 0.9924 | 0.9974 | 0.9924 | 0.63 |
| VGG16 | 0.9770 | 0.9761 | 0.9752 | 0.9761 | 0.83 |
| C-Alex | 0.9851 | 0.9883 | 0.9916 | 0.9885 | 0.71 |
| Model | Batch | Initial Learning Rate | Optimizer | Training Epochs |
|---|---|---|---|---|
| Yolov5 | 4 | 0.01 | SGD | 10 |
| VGG16 | 4 | 0.01 | Rmsprop | 10 |
| C-Alex | 4 | 0.01 | AdaDelta | 10 |
| Model | Precision | Accuracy | Recall | F1-Score | Confidence Score |
|---|---|---|---|---|---|
| yolov5 | 0.86 | 0.9 | 0.84 | 0.93 | 0.31 |
| VGG16 | 0.69 | 0.74 | 0.89 | 0.82 | 0.58 |
| C-Alex | 0.96 | 0.93 | 0.9 | 0.92 | 0.54 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, K.; Huang, Z.; Chen, C.; Cheng, Y.; Shang, Y.; Zhu, P.; Jv, H.; Li, L.; Li, W.; Wang, S. Surface Crack Detection of Steel Structures in Railroad Industry Based on Multi-Model Training Comparison Technique. Processes 2023, 11, 1208. https://doi.org/10.3390/pr11041208
Chen K, Huang Z, Chen C, Cheng Y, Shang Y, Zhu P, Jv H, Li L, Li W, Wang S. Surface Crack Detection of Steel Structures in Railroad Industry Based on Multi-Model Training Comparison Technique. Processes. 2023; 11(4):1208. https://doi.org/10.3390/pr11041208
Chicago/Turabian StyleChen, Kunhao, Zhendong Huang, Cheng Chen, Yijia Cheng, Yuanbiao Shang, Pengcheng Zhu, Haoye Jv, Lanlan Li, Weili Li, and Shuyi Wang. 2023. "Surface Crack Detection of Steel Structures in Railroad Industry Based on Multi-Model Training Comparison Technique" Processes 11, no. 4: 1208. https://doi.org/10.3390/pr11041208