1. Introduction
With the rapid improvement of social economy and people’s living standards, the air traffic flow has continued to grow in recent years (Boeing [
1], Federal Aviation Administration [
2]). Although the outbreak of COVID-19 has temporarily limited aviation demand, authoritative forecasts indicate that sharp increase of air traffic will appear after the epidemic (Gudmundsson [
3]). How to improve the capacity of the air transportation system will continue to be a significant but challenging problem for governments, airlines and passengers.
Many researches and investigations have pointed out that insufficient throughput of runway is the bottleneck of the air transport system (Bennell et al. [
4]). However, the construction of new runways is expensive. For example, the construction of the third runway in Wuhan Tianhe International Airport cost 3.08 billion yuan (Wuhan Network Information Office [
5]). Therefore, many experts and scholars attempt to make the most use of the existed runway, that is, to sequence the aircraft on the runway to improve the efficiency of runway utilization. It is known as the Aircraft Arrival/Departure Scheduling Problem (AADSP), or Aircraft Scheduling Problem (ASP) for simple (Beasley et al. [
6], Balakrishnan and Chandran [
7], Ikli et al. [
8]).
ASP aims to take off/land as many aircraft as possible within a given period of time. ASP concerns a given minimum separation time (MST) table.
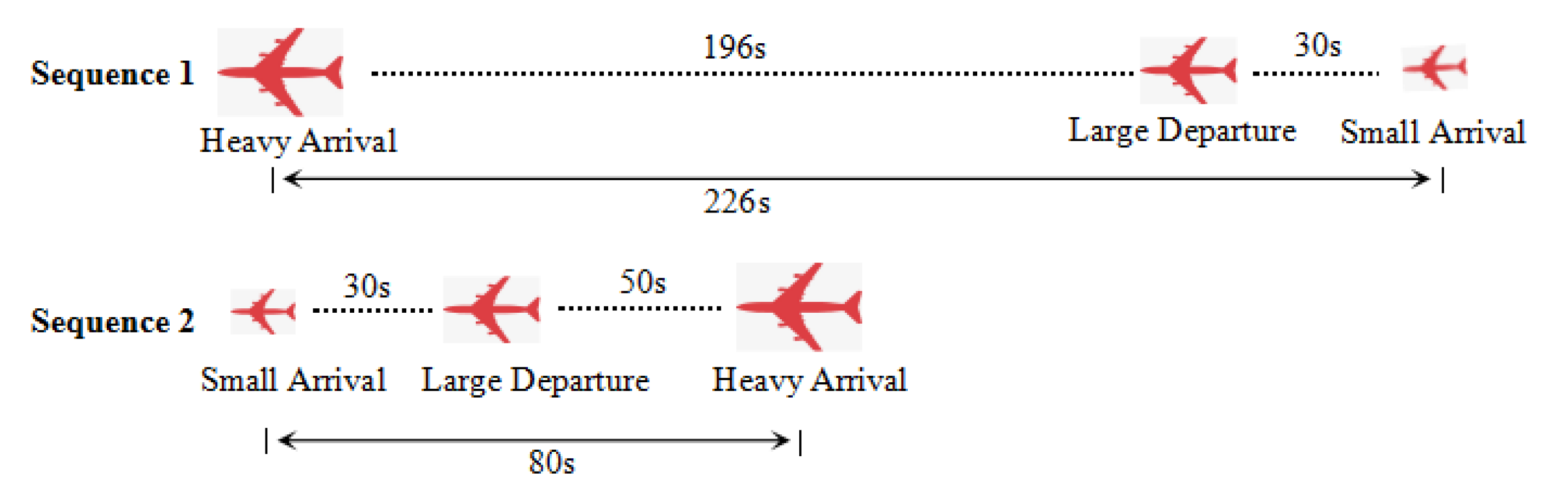
Table 1 illustrates the MST between the successive aircraft concerning three typical aircraft types with arrival or departure status, that is, small arrival, large arrival, heavy arrival, small departure, large departure and heavy departure. The MST table is asymmetrical. If a small arrival aircraft lands after a heavy arrival, the required separation between them is 196s; however, when a heavy arrival aircraft lands after a small arrival, the separation is only 60 s. So a proper scheduling strategy may greatly shorten the makespan.
Figure 1 presents two scheduling strategies for the same three aircraft. The strategy of sequences 2 saves more than 65% of time than that of sequence 1.
The asymmetry nature leads ASP to be NP-hard with high computational complexity. There are at most
possible sequencing strategies with
n aircraft (Beasley et al. [
6], Balakrishnan and Chandran [
7]). The Branch and Bound (B&B), Ant Colony (AC) and Matrix Approximation (MA) algorithms are the most used solution methods.
Branch and Bound (B&B): Brinton [
9] has introduced the first B&B approach for ASP in 1992, which is a foundation tool of the Center TRACON Automation System (CTAS) developed by NASA. Then Beasley et al. [
6] proposes an widely cited Mixed Integer Programming (MIP) approach for ASP, and designs the corresponding B&B algorithm. Some additional constraints are added to reduce the zero-one space of the mixed integer formulation. Bennell et al. [
4] present an extensive literature overview on B&B. Prakash et al. [
10] proposes the B&B algorithm for single runway AADSP, where the data-splitting method is used to reduce the search space. It splits the original sequence into all possible pairs of sub-sequences, and then independently solves each sub-sequence, while ensuring global optimality. Then Prakash et al. [
11] extend this method to the multi-runway case. The winter AADSP is studied by Pohl et al. [
12]. The B&B algorithm is designed and three pruning tree rules, concerning time windows, separation identical aircraft and dominant snow removal patterns, are used.
Ant colony (AC): Ant colony is firstly adopted by Randall [
13] for ASP in 2002. The objective function is to minimize the total penalty costs. Then Zhan et al. [
14] combines the AC system with Receding Horizon Control (RHC) for real-time scheduling. By comparing with Hu and Chen [
15], it validates that the AC is better than GA under the RHC strategy. Wu et al. [
16] extends this method to the multi-runway case, and designs a two-stage RHC based AC algorithm. In the first stage, AC algorithm optimize the aircraft based on single runway problem; in the second stage, the aircraft are assigned to the multi-runway based on the first stage queue and the actual runway occupation. Bencheikh et al. [
17] use a bi-level graph to model the multi-runway ASP and designs an AC algorithm. Ants start from a dummy initial node, select a runway, then insert an aircraft in this runway, based on the aircraft priority and the ant colony memory. Numerical results show that their AC finds optimal solution for 80% of the test instances. Bencheikh et al. [
18] then study the dynamic ASP and propose a new algorithm named memetic which involves the local heuristic algorithm in AC. Ma et al. [
19] uses the AC algorithm for the AADSP, a two-phase algorithm is proposed for the air traffic management. In the first phase, the takeoff aircraft are separated from the original sequence, and AC algorithm is used to schedule the landing sequence. In the second phase, the takeoff aircraft are inserted into the scheduled landing sequence while assure the landing first. A parameter
M is set to restrict the time of each landing aircraft moving back from the scheduled time, which is not more than
M. This method (named TPLP-M) is used as a comparison in the following numerical study.
Matrix Approximation (MA): The MA method is proposed by Ma et al. [
20] and Faye [
21]. Ma et al. [
20] use a rank 2 matrix to approximate the original Minimum Separation Time (MST) matrix. Then the ASP becomes sequence-independent and thus easier to solve. This method sacrifices the solution quality, but accelerates the computational speed. Faye [
21] use the rank 2 matrix approximation method to study the multi-runway scheduling problem where the B&B algorithm is involved in the method. Lidier and Stolletz [
22] admit the advantages of this method, but points out that this method will produce certain errors when approximating the matrix. Xu [
23] studies the mechanism of errors generating, and use the AC algorithm to repair the accuracy loss. The methods have two steps: first, the aircraft MST matrix is approximated by rank 2 matrix, which similar as Ma et al. [
20] and Faye [
21]; second, AC algorithm is used to supplement the loss in the matrix approximating process. The numerical study validates that this new algorithm is better than the algorithm in Ma et al. [
20] when minimize the makespan.
Other methods: Some other methods for runway and aircraft scheduling see in Anagnostakis and Clarke [
24], Liu et al. [
25], Atkins and Brinton [
26], Bohme [
27], Lee [
28], Willemain et al. [
29], Pinedo et al. [
30], Khassiba et al. [
31], Huo et al. [
32], Yu et al. [
33], Ghosh et al. [
34]. And some hybrid algorithms are in Eslami et al. [
35], Khajehzadeh et al. [
36], Khajehzadeh et al. [
37].
In this paper, we go on investigating the MA method, and combine it with the AC algorithm to solve AADSP. AC is chosen here because each ant in AC directly returns a sequencing strategy which is a possible choice to increase the precision of the MA method. We firstly generate a rank 2 matrix (denoted by MST
) to approximate the actual minimum separation time (MST), where the optimal solution concerning MST
is easy to find when the aircraft time window constraint is ignored and the triangle inequality assumption is not violated. Then we use AC to optimize the AADSP while considering the differences between MST and MST
and the additional constraints. The numerical study validates that this new method has better performance than CPLEX and the two-stage algorithm in Ma et al. [
19]. It is a promising method to improve the efficiency of the aircraft scheduling system.
In the remainder of this paper, we use RMA-AC to denote “the AC algorithm based on RMA method” for abbreviation.
This paper is organized as follows. The AADSP is defined in
Section 2. In
Section 3, the MST constraint is analyzed, and the RMA method is proposed. In
Section 4, RMA-AC algorithm is originally designed to solve AADSP. The numerical study is conducted in
Section 5, while some conclusions are summarized in
Section 6.
2. Problem Definition
2.1. Basic Concepts
(1) First Come First Served (FCFS)
The FCFS strategy is widely used in the airport scheduling system. In the landing case, FCFS is implemented according to the estimated landing time of each aircraft. The estimated landing time is achieved by the aircrafts’ planned arrival route, cruise speed, and the standard procedure descent profile. In the take-off case, the captain proposes to the ATC the time when the aircraft can leave the gate and drive to the runway, so as to determine the take-off FCFS sequence. The advantage of FCFS owes to its simplified operation process to the controller and fairness to each aircraft, while the disadvantage owes to the low runway utilization.
(2) Time Windows Constraint
The time window constraint restricts that the aircraft must take-off/land within its earliest and latest possible take-off/landing time, otherwise insecurity may happen. We use and to indicate the earliest and latest possible takeoff/landing time of the aircraft i, then the actual takeoff/landing time should be restricted within the range of . is determined by the factors including the aircraft speed, runway availability, weather factors, scheduling strategy, and so on; while is determined by the factors including aircraft speed, runway availability, limited aircraft fuel, maximum allowable delay time, scheduling strategy, and so on.
(3) Minimum Separation Time (MST)
The aircraft in the air generates wake vortex. If two aircraft get too close, the generated wake will cause dangerous rolling moment to the following aircraft. So the minimum separation must kept between them. The MST is determined by the aircraft weight, type, speed, navigation facilities, and other factors. The aircraft weight is the most important factor relating to the aircraft wake vortex. Generally speaking, heavy aircraft generates stronger wake, and can also bear stronger wake disturbance; while small aircraft are just the opposite. Therefore, the case of a small aircraft following a heavy aircraft (compared with a heavy aircraft following a small) requires greater separation (see in
Table 1, and see also in Hancerliogullari et al. [
38]).
It is worthy to note that, in AADSP, the triangle inequality for aircraft minimum separation may not satisfy, that is, , where is the aircraft sequence set, and is the MST of aircraft i followed by aircraft j. For example, when there are three aircraft for scheduling, which are 1 arrival heavy, 2 small departure, 3 small arrival, then .
2.2. Problem Description
Suppose there are
n aircraft, and they are labeled according to their order in the FCFS sequence.
denotes the aircraft set.
is the final scheduled sequence which indicates the order of all the aircraft.
is the
ith aircraft in sequence
, and its value indicates the order of aircraft
in the original FCFS sequence. For example,
means that the fifth aircraft in the scheduled sequence
is the sixth aircraft in the FCFS sequence.
denotes the MST between two successive aircraft (
and
) in sequence
.
and
are the earliest and latest take-off/landing time of aircraft
, respectively. Then the final takeoff/landing time
for aircraft
can be achieved by
The objective function is the makespan (
W), which is the takeoff/landing time of the last aircraft in the scheduled sequence
(denoted by
), that is,
2.3. Mixed Integer Programming (MIP) Model
Suppose the arrival/departure aircraft set is . Each aircraft has a predefined time window . is the MST of aircraft i followed by j, and is the executed take-off/landing time of aircraft i. The MIP model is described in Equations (3)–(8).
The objective function (3) is to minimize the makespan of the final aircraft sequence, which is equivalent to Equation (
2). Here,
is the takeoff/landing time of aircraft
i, and constraint (7) restrict
,
. Thus
W is the take-off/landing time of the last aircraft.
Constraint (4) ensures each aircraft i takoff/landing within its time window, which is between the earliest takeoff/landing time and the latest takeoff/landing time .
In constraint (5), is a 0-1 variable. means that aircraft i should takeoff/landing before aircraft j, while means that aircraft i should after j. and should not equal to 0 (or 1) at the same time. ensures this requirement. U is the domain of all possible in , that is .
Constraint (6) ensures the MST constraint, where is the MST of aircraft j following i. There are two cases
(i) Aircraft i before j (). Then ensures the separation between aircraft i and j.
(ii) Aircraft i after j (). Then , which is ineffective when M is large enough.
For the special case of triangle inequality not satisfying, constraint (6) ensures all aircraft in the runway satisfying MST constraint, and thus involves the special case.
Constraint (8) is the definition and restriction of all variables.
3. Rank 2 Matrix Approximation (RMA) Method
The RMA method is originally proposed by Ma et al. [
20] and Faye [
21]. Firstly, it generates a new rank 2 matrix (denoted by MST
), and the ASP concerning this new MST
is linearly solvable. Secondly, MST
limitlessly approximates the actual MST until they get close enough. Finally, the solution of ASP concerning the new MST
is exact the (hypo-)optimal solution of that concerning the actual MST, that is, the traditional difficult ASP (concerning MST) is transferred to an easier ASP (concerning MST
). Following are the MST
generating process and some useful properties.
3.1. Construction of Rank 2 Matrix Approximation Method
An important factor leading to the high complexity of ASP is the asymmetric nature of the MST matrix. The idea of the RMA method is to approximate the actual MST matrix by a rank 2 matrix, thus the ASP is simplified (Ma et al. [
20], Faye [
21], Xu [
23]).
The MST matrix is used to avoid the wake-vortex effect and ensure the safety of the following aircraft (Xu [
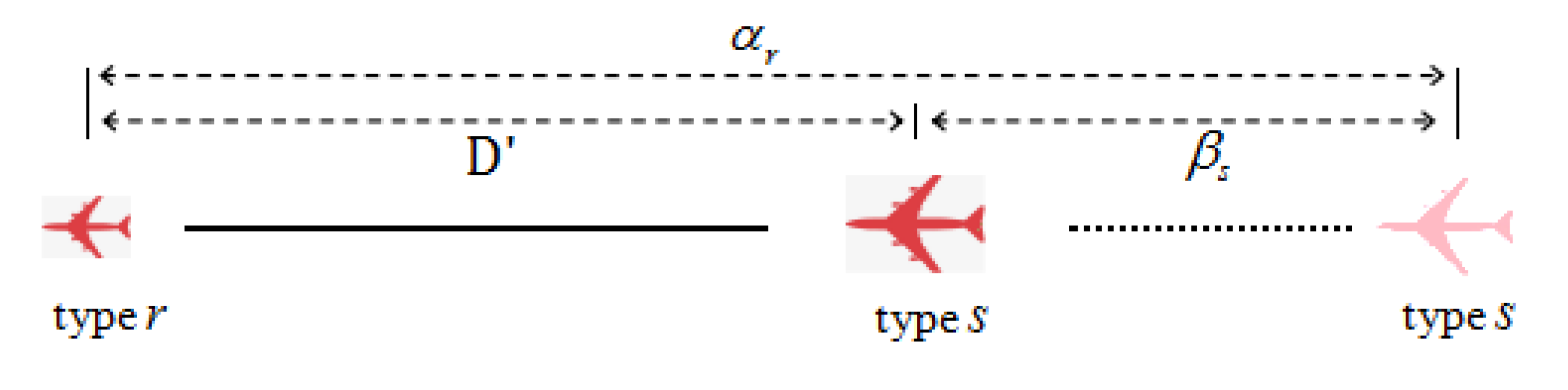
23]). As we known, heavy aircraft can generate and bear stronger vortex, while small aircraft just the opposite. Then we can divide the MST matrix into two parts, where
denotes the ability of the leading aircraft of type
r generating vortex and
denotes the ability of the following aircraft of type
s bearing vortex. Thus the new MST matrix is achieved by
(see in
Figure 2). Here,
is the new rank 2 matrix, which is achieved by
.
is the aircraft type set, and suppose there are
p type of aircraft.
The objective function (9) is to minimize the total differences between the original MST matrix
D and the lately generated rank 2 matrix
.
measures the differences between
D and
(see in Equation (
10)).
Constraint (11) is the lately generated rank 2 matrix , where each element in it can be divided into two parts. The first part (denoted by ) models the ability of the leading aircraft of type r to generate vortex, and the second part (denoted by ) models the ability of the following aircraft of type s to bear vortex.
Constraint (12) restricts the main variables (
,
and
) non-negative.
makes each element in
not bigger than the corresponding element in
D, which ensures the following theorem 1 and the condition (3) in theorem 3.
We can also use MST to denote . Then there comes three main types of ASP, which are ASP-MST, ASP-MST, and ASP-MST. ASP-MST means that in the ASP the separation between the successive aircraft is determined by MST; ASP-MST means that determined by MST; and ASP-MST means that determined by MST.
Following, , and denotes, respectively, the element in the matrices of MST, MST and MST when an aircraft of type r is followed by another of type s.
3.2. Important Property of ASP-MST
The rank 2 matrix MST generated above has two main properties to make optimization easier. Firstly, ASP-MST is the lower-bound of ASP-MST. Secondly, ASP-MST is sequence-independent and easier to solve (while ASP-MST is sequence-dependent). When the RAM method optimizes the original ASP-MST, it first finds the lower-bound via ASP-MST, and then generates a solution approximating this lower bound to form a good final solution.
In this subsection, the time window constraint is assumed ignored and the triangle inequality for MST is assumed not violated, for simple. The case of violating the two assumptions is discussed in
Section 4 when designing the AC algorithm for real scheduling. Theorems 1 and 2 explain the two properties of ASP-MST
(see their proofs in Ma et al. [
20]). Theorem 3 supports the approximating process (see its proof in Xu [
23]). Here,
,
and
are the makespan of sequence
in ASP-MST, ASP-MST
and ASP-
MST, respectively.
is the aircraft type set. When considering
Table 1, we have
.
Theorem 1. The makespan of each sequence π in ASP-MST is the lower bound of π in ASP-MST, that is, .
Theorem 2. The optimal solution of minimizing makespan for ASP- only depends on the first and the last aircraft in the final sequence, if the time window constraint is assumed ignored, the triangle inequality for MST is assumed not violated, and and are given constant, .
Theorem 2 simplifies ASP-MST when the time window constraint is ignored and triangle inequality is not violated. Theorem 3 explains the relationship of ASP-MST and ASP-MST, and presents sufficient condition of the optimal solution of ASP-MST.
Theorem 3. When the time window constraint is ignored and triangle inequality is not violated, the sequence Π is optimal (with minimized makespan) in ASP-MST model if the following three requirements are satisfied.
- (1)
Sequence Π is the optimal sequence in ASP- model;
- (2)
Sequence Π has 0 makespan in ASP- model, i.e., ;
- (3)
All elements in ΔMST are nonnegative, i.e., all elements in MST are not bigger than the corresponding elements in MST.
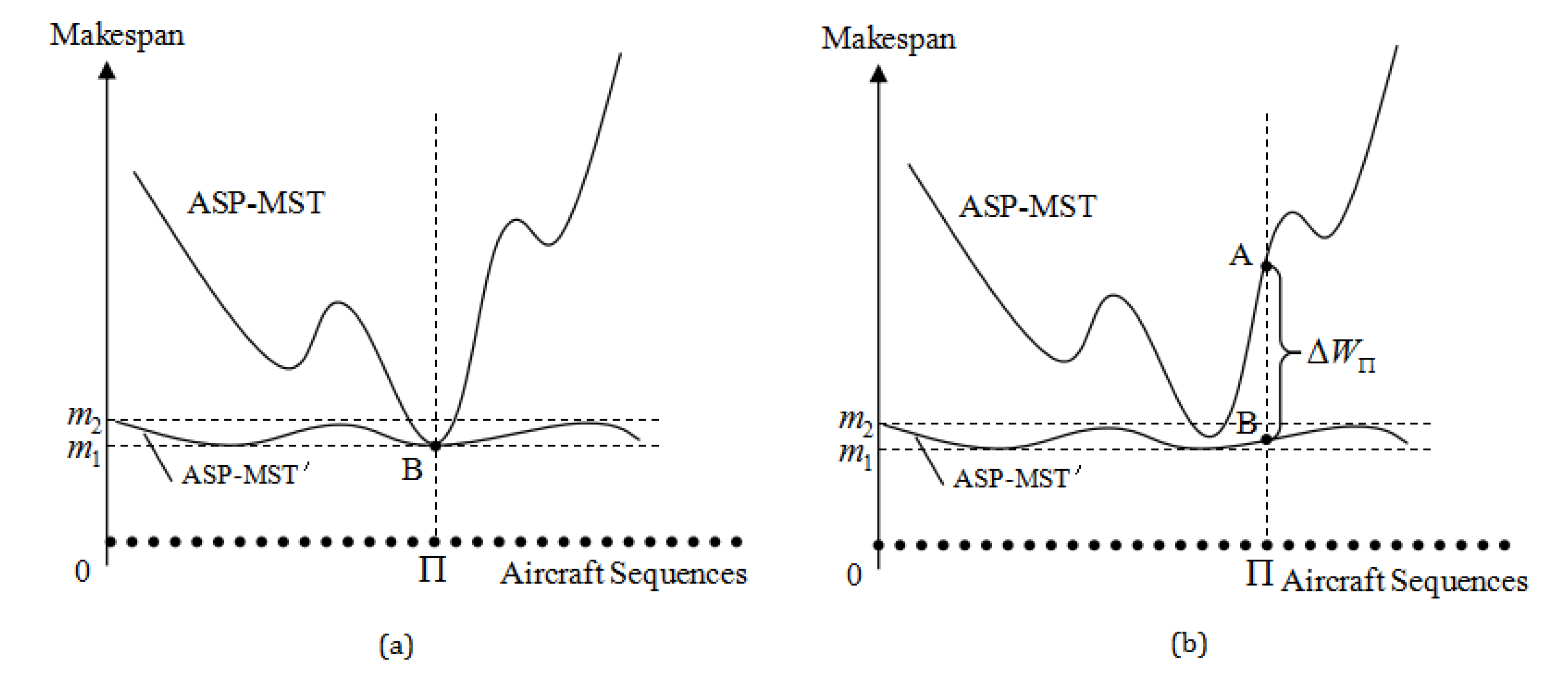
Figure 3a illustrates the relationship between ASP-MST and ASP-MST
. Requirement (3) shows the ASP-MST
curve always below ASP-MST curve. Requirements (2) means that ASP-MST curve is tangent to ASP-MST
curve at the point representing sequence
. Requirement (1) shows that the ASP-MST
curve reaches the bottom at the point representing sequence
. Thus ASP-MST is minimized at the point of
.
If requirement (1) is not satisfied, but requirements (2) and (3) are satisfied, by a sequence , then is strongly hypo-optimal. Here, “strongly hypo-optimal” means that the sequence’s optimality is only determined by its first and last aircraft. A sequence in ASP-MST is at least strongly hypo-optimal when the time window constraint is ignored and triangle inequality is not violated (Theorem 1).
Based on the above theorems, the optimization of ASP based on the RMA method contains three steps. First, for a given aircraft sequence, we use
to construct a rank 2 matrix
satisfying the requirement (3) of theorem 3. Second, optimize
according to the requirement (2) in theorem 3 to minimize the makespan of
. Finally, the optimal or nearly optimal solution is obtained (that is, find the aircraft sequence
so that
in
Figure 3b is minimized). Following we use AC algorithm to optimize
and consider the case with time window constraint and triangle inequality violation.
4. Ant Colony Algorithm Based on RMA Method
As shown above, RMA method generates rank 2 matrices of MST
. Then we can optimize ASP-MST
which is sequence-independent and easier to solve, but a significant loss of precision may happen between MST and MST
. To overcome it, the AC algorithm is used to supplement the precision via considering
. The time window constraint and triangle inequality violation are also considered. Numerical results in
Section 4 validate the efficiency of this new algorithm, named RMA-AC.
4.1. RMA-AC Algorithm Construction
Following introduces the RMA-AC algorithm for AADSP. AC is a famous meta-heuristic algorithm via modeling the ants behavior searching for food. It is originally developed for the Traveling Salesman Problem (TSP), which aims to find the shortest route for a traveler visiting each node once and only once in a graph, starting and finishing at the same node (Dorigo [
39]).
The AADSP is similar as an open TSP (the tour does not return to the origin), where the runway is regarded as a traveler and aircraft as nodes (Randall [
13], Bennell et al. [
4]). The time window constraint and triangle inequality violation are considered. The objective is to minimize makespan in Equation (
2). The ants are expected to visit out all nodes as soon as possible, which is equivalent to the runway landing as many aircraft as possible. Following is the techniques setting for RMA-AC.
(1) Aircraft Sequences Classification
The aircraft with the same type are not expected to overtake each other, so they are put together to construct subsequences () according to their orders in the FCFS sequence (). Each time only the first ant-unvisited aircraft in is chosen to take-off/land so that the overtaking of aircraft with the same type is avoided. Since there are p aircraft types, we get p subsequences, which are , , , . All aircraft in have the same aircraft type of r, . denotes the ith aircraft in .
For example, a FCFS sequence is of types , . Then there are 6 subsequences. is constructed by the 1st, 4th and 7th aircraft in FCFS according to their order; is by the 3rd, 5th and 6th aircraft; and are empty sets, is constructed by the 2nd and 8th aircraft, and is also an empty set.
(2) Ants Initialization. The initial pheromone in each arc is set as , . Here i and j are the nodes (aircraft), and arcs are imagined between nodes. is an aircraft set for the ant s’s next possible visiting. At the starting, , and each ant s randomly visits an aircraft in , , , . After ant s visiting , we set ; after visiting , we then set ; and so on until all aircraft in are visited.
(3) State Transition Rule. After ant
s visiting aircraft
i, it randomly selects the next allowable aircraft
j to visit according to
.
where
is the allowable aircraft which follows aircraft
i.
is the existed pheromone in arc
, and
is the heuristic information factor. The parameters
and
determine the relative importance of
versus
. The heuristic information
is set as
because there are three main factors affecting the final makespan, which are the nonnegative number in
MST (denoted by
), the time window constraint (denoted by
), and the triangle inequality violation (denoted by
). The denominator is set as
to avoid the infeasible case of 0 denominator. In the actual computing, a simple setting may be more effective, which is
It weakens the effect of triangle inequality violation in the state transition process. The final makespan computing should be added when ants complete their tours.
(4) Pheromone Updating Rules. The pheromone updating is carried out on each arc
as Equation (
16) after all ants completing their tours.
where
is the original pheromone in arc
, and
is the updated pheromone.
models the pheromone evaporation, where the evaporation ratio is
.
denotes the lately released pheromone.
, and
is defined, for an ant
s, as
where
is the tour makespan achieved by Equation (
1) for ant
s, and
Q is a given constant.
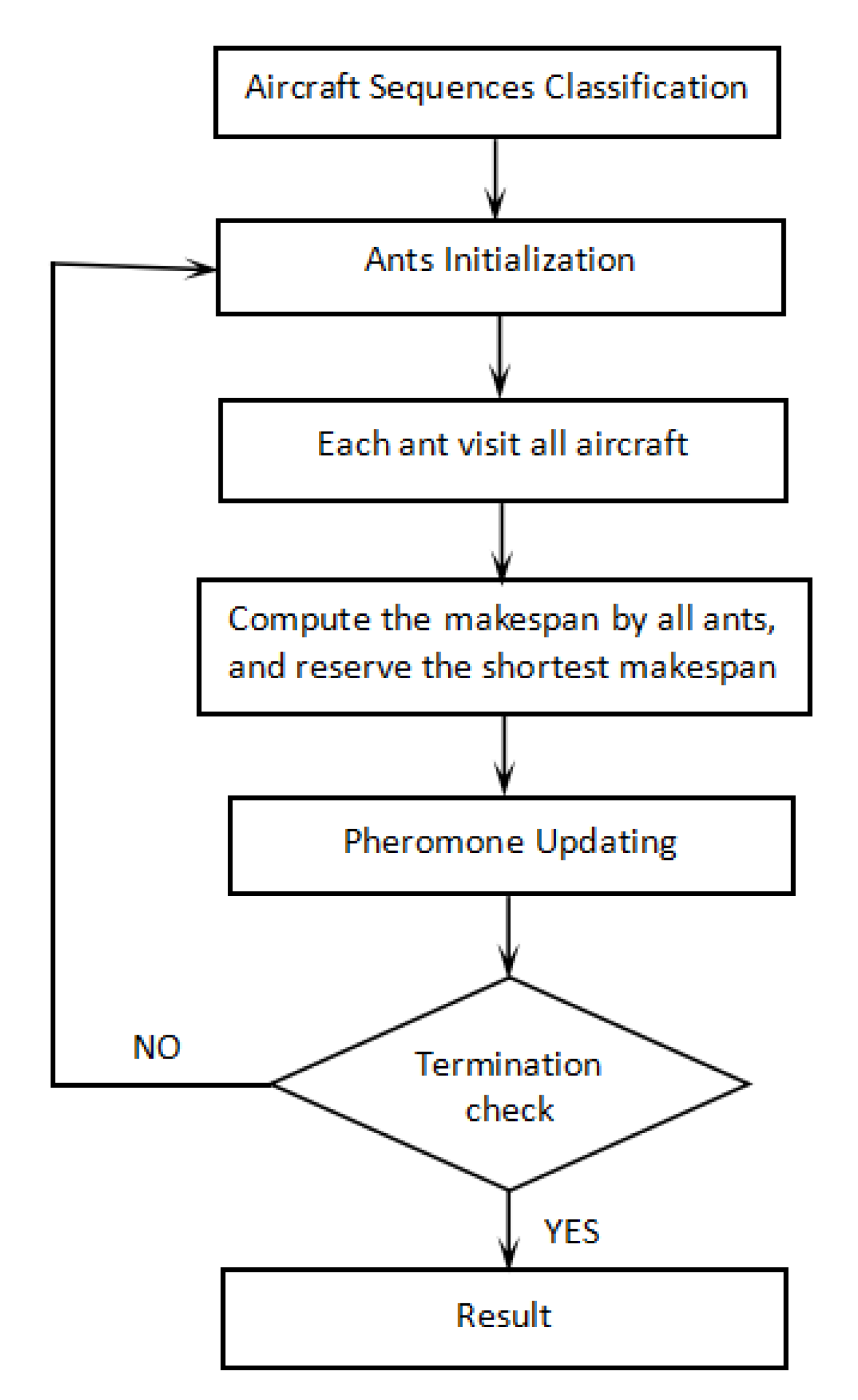
4.2. Complete AC Algorithm
The complete RMA-AC algorithm is explained as follows, see also in
Figure 4.
Step 1. Initialization. There are
m ants traveling between aircraft. The aircraft sequence is divided into
p subsequences according to
Section 4.1(1).
is the possible aircraft set for ant
s’s next visiting. At the starting, each ant
s randomly selects an aircraft in
to visit. If
is chosen, we set
.
Step 2. Each ant s randomly visits the next aircraft in by Equations (13) and (15). After s visiting , set . If all aircraft in have been visited (), delete from .
Step 3. If all aircraft in have been visited by ant s (), go to Step 4; otherwise (), go to Step 2.
Step 4. Calculate out ant
s’s tour makespan
by Equation (
1), then find the shortest tour
. Compare it with the historical shortest tour, and reserve the shorter one.
Step 5. Update the pheromone
by Equations (
16) and (
17).
Step 6. Termination check. If the termination criteria of the limit time is met, then break the loop and return the final result. Otherwise, go to Step 1.
6. Conclusions and Future Work
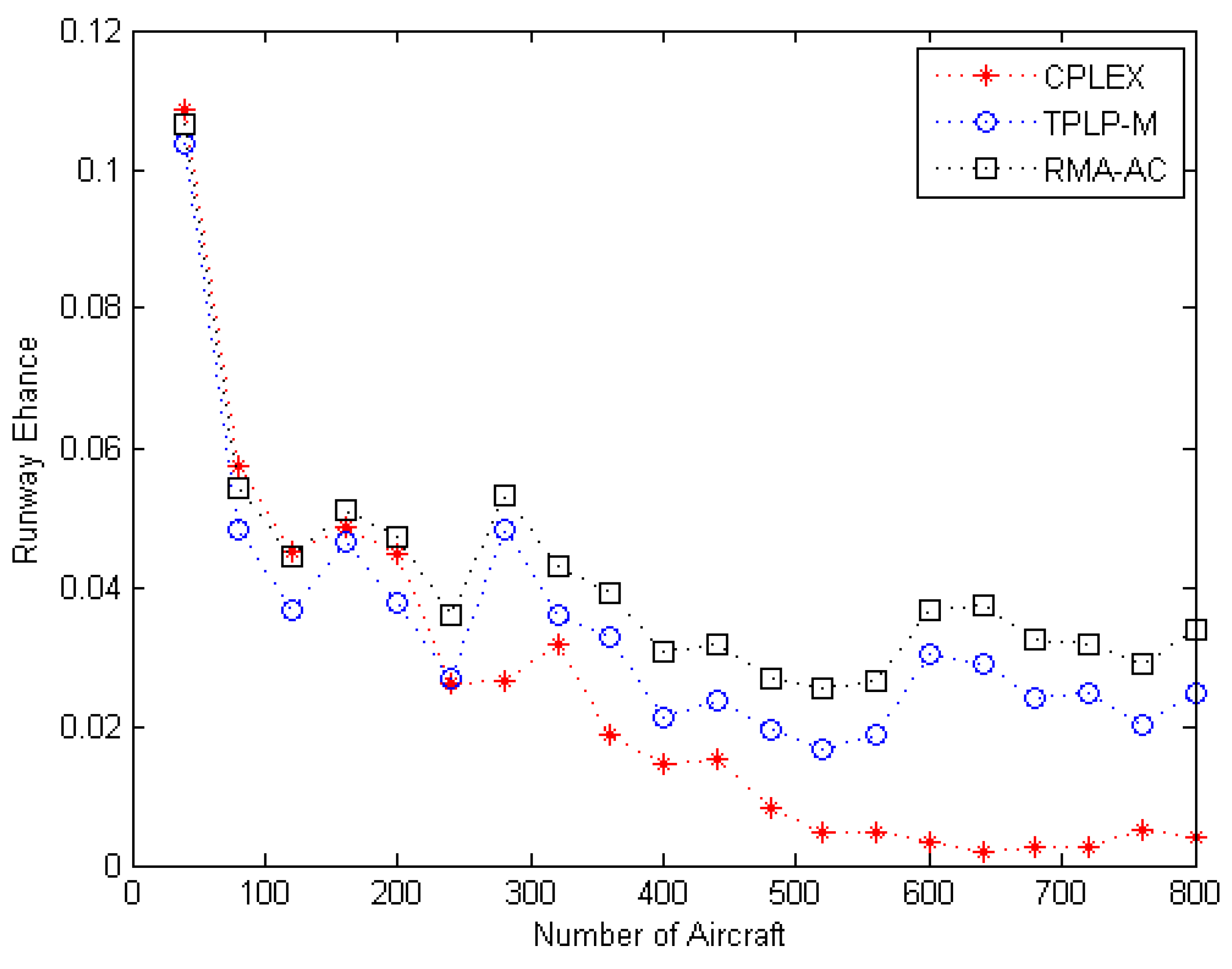
The Aircraft Scheduling Problem (ASP) is the key problem determining airport scheduling efficiency. This paper studies the single runway Aircraft Arrival/Departure Scheduling Problem (AADSP). A Mixed Integer Programming (MIP) model is constructed, and three methods are used, which are the classical Two-Phase with Landing Priority (TPLP-M) algorithm, Ant Colony based on Rank 2 Matrix Approximation (RMA-AC) and the CPLEX optimizer. Numerical experiments show that the three methods can improve the efficiency of runway scheduling. When the number of aircraft is not more than 120, the CPLEX solution is the best; When the number of aircraft is more than 120, the RMA-AC solution is the best. These methods have a positive effect on optimizing the current airport scheduling system, improving the efficiency of runway scheduling and reducing aircraft delay. Numerical result also validates that RMA-AC has better performance than TPLP-M.
There are some research directions for the future study. Firstly, a more efficient algorithm can be designed to improve the efficiency of solution, such as combining the RMA methods with other heuristic algorithm for optimization to get higher efficiency. Secondly, considering the terminal area structure and runway structure, a practical model suitable for a specific airport can be established, such as multi-runway scheduling model. Thirdly, AADSP can be carried out under specific scenarios, such as in busy hours, under emergencies, in the epidemic prevention and control environment. In addition, extending the RMA method to solve other combinatorial optimization problems is also challenging and interesting.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}