
Motion Planning of an Inchworm Robot Based on Improved Adaptive PSO


Abstract
:1. Introduction
- (1)
- Based on “error tracking” of the cubic polynomial programming in Cartesian space and seventh polynomial programming in joint space, we propose an optimal motion planning method for energy consumption, considering both kinematic and dynamic constraints.
- (2)
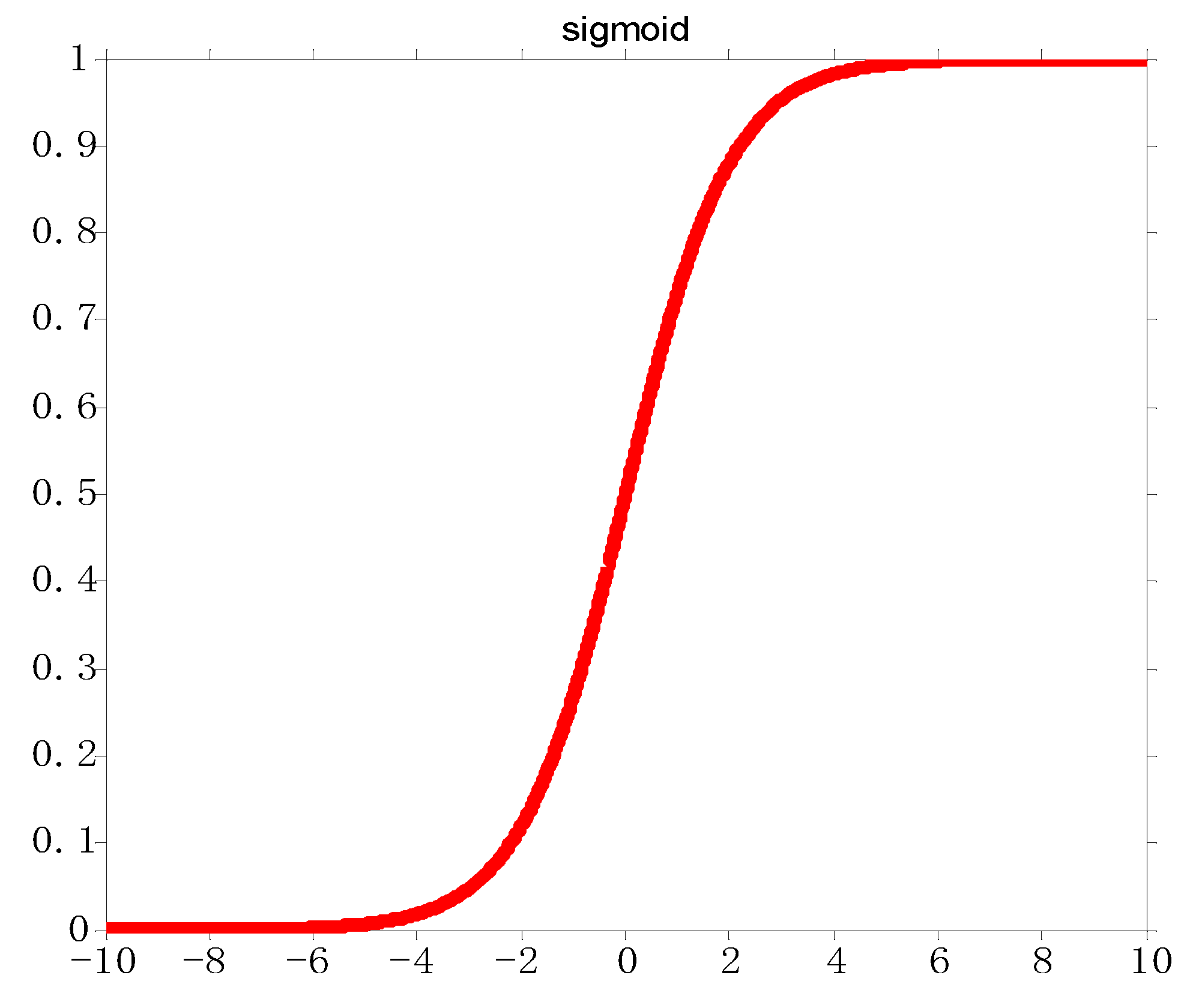
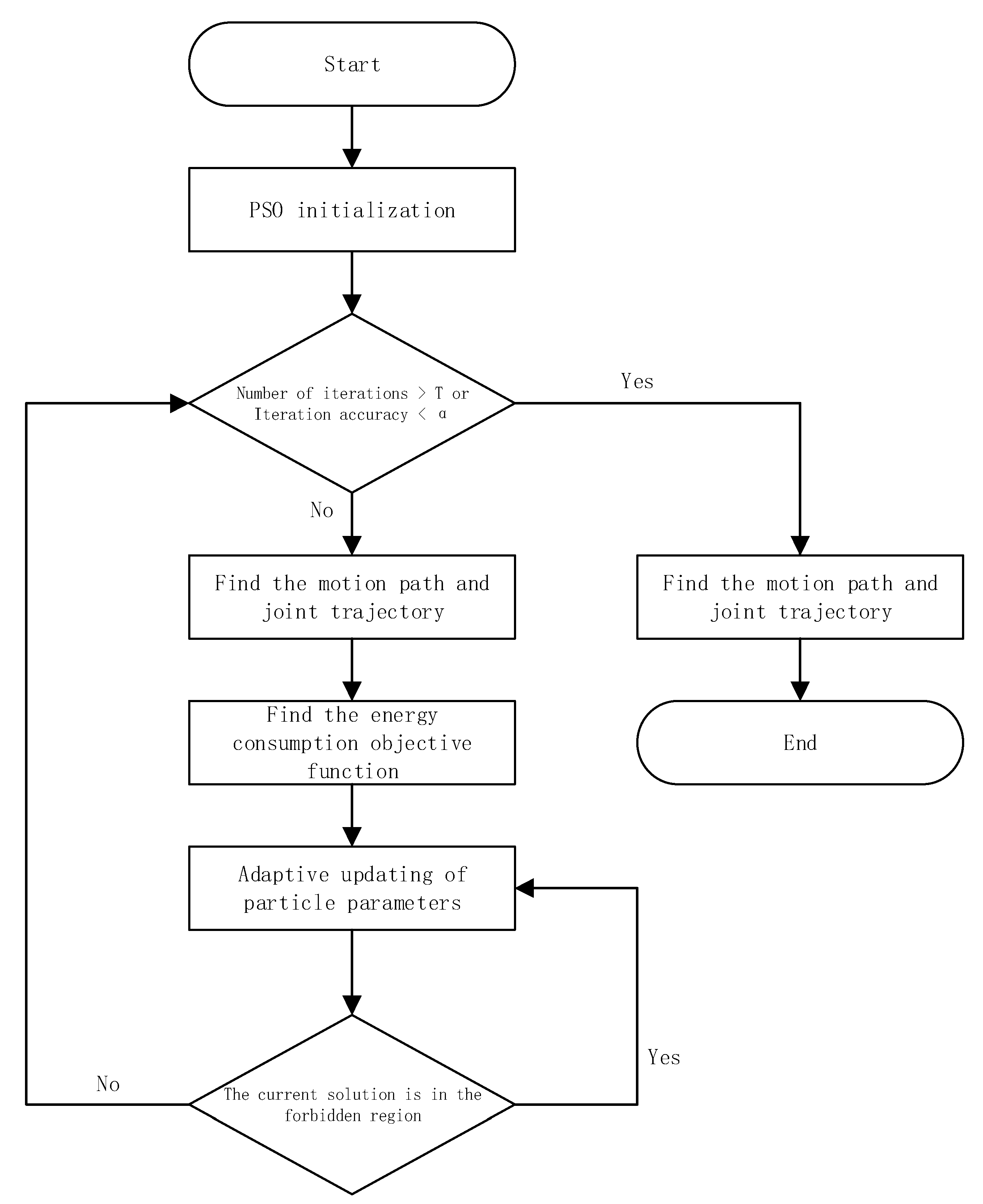
- Based on the optimal energy consumption model, we propose an improved adaptive PSO algorithm using the function of the sigmoid adaptive to adjust the inertia weight operator and set the tabu region.
2. Motion Energy Consumption of the Inchworm-Mimicking Robot and Mathematical Description of the Spatial Curve Similarity Operator
2.1. Energy Consumption of Motion
2.2. Space Curve Similarity Operator
3. Motion Planning Method Based on the Optimal Energy Consumption
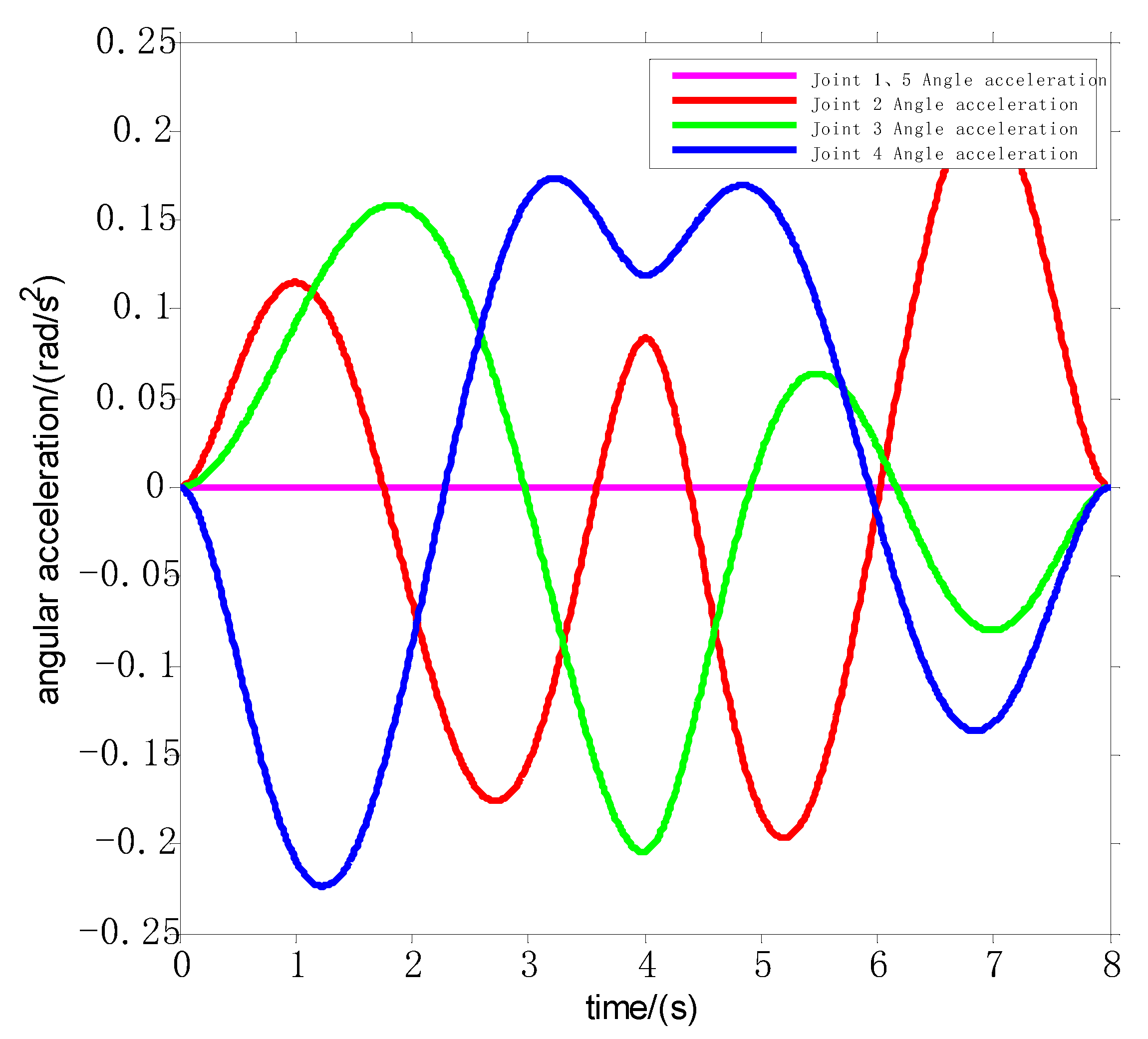
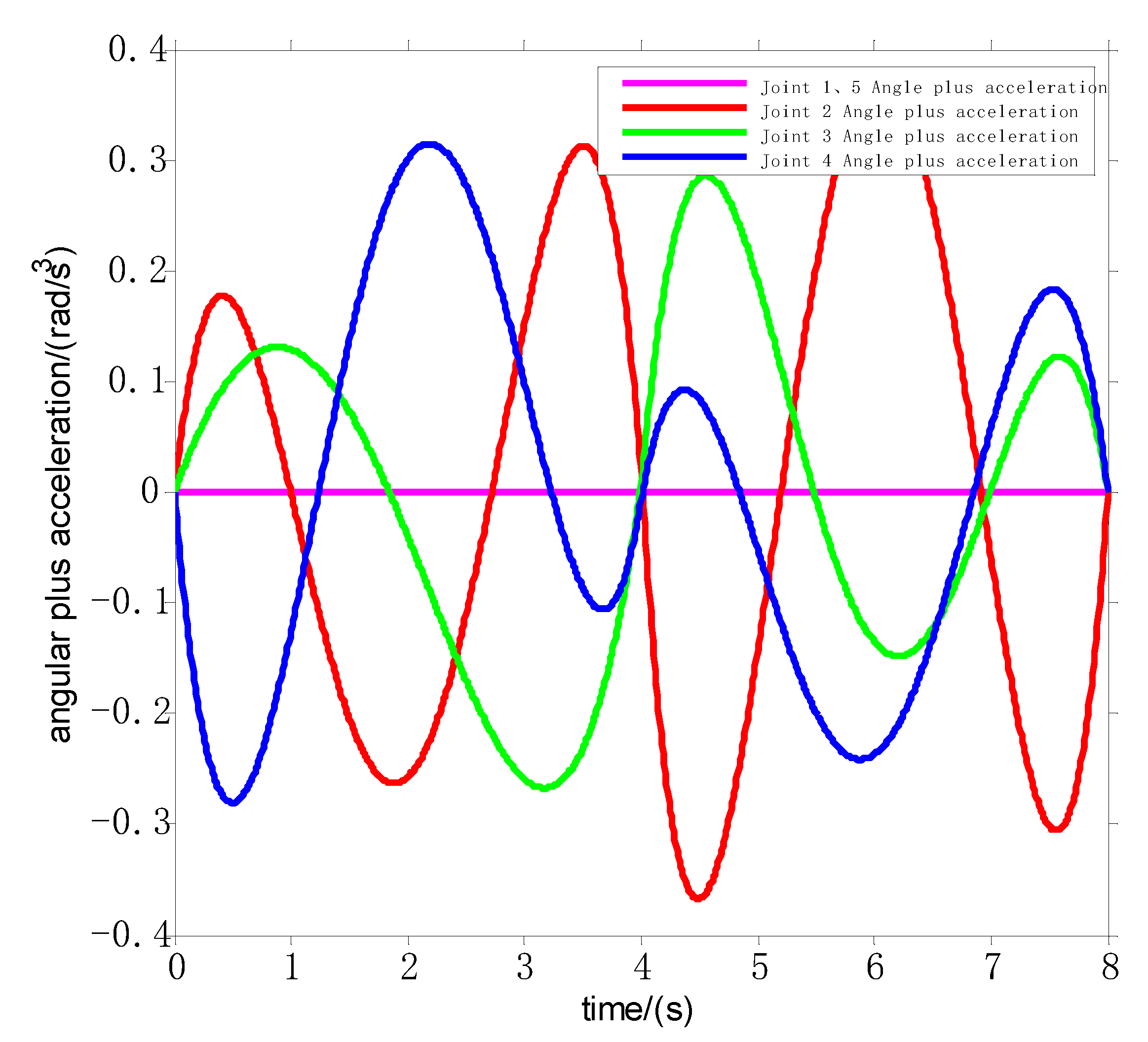
3.1. Continuous Trajectory Planning Based on Joint Space plus the Acceleration Curve
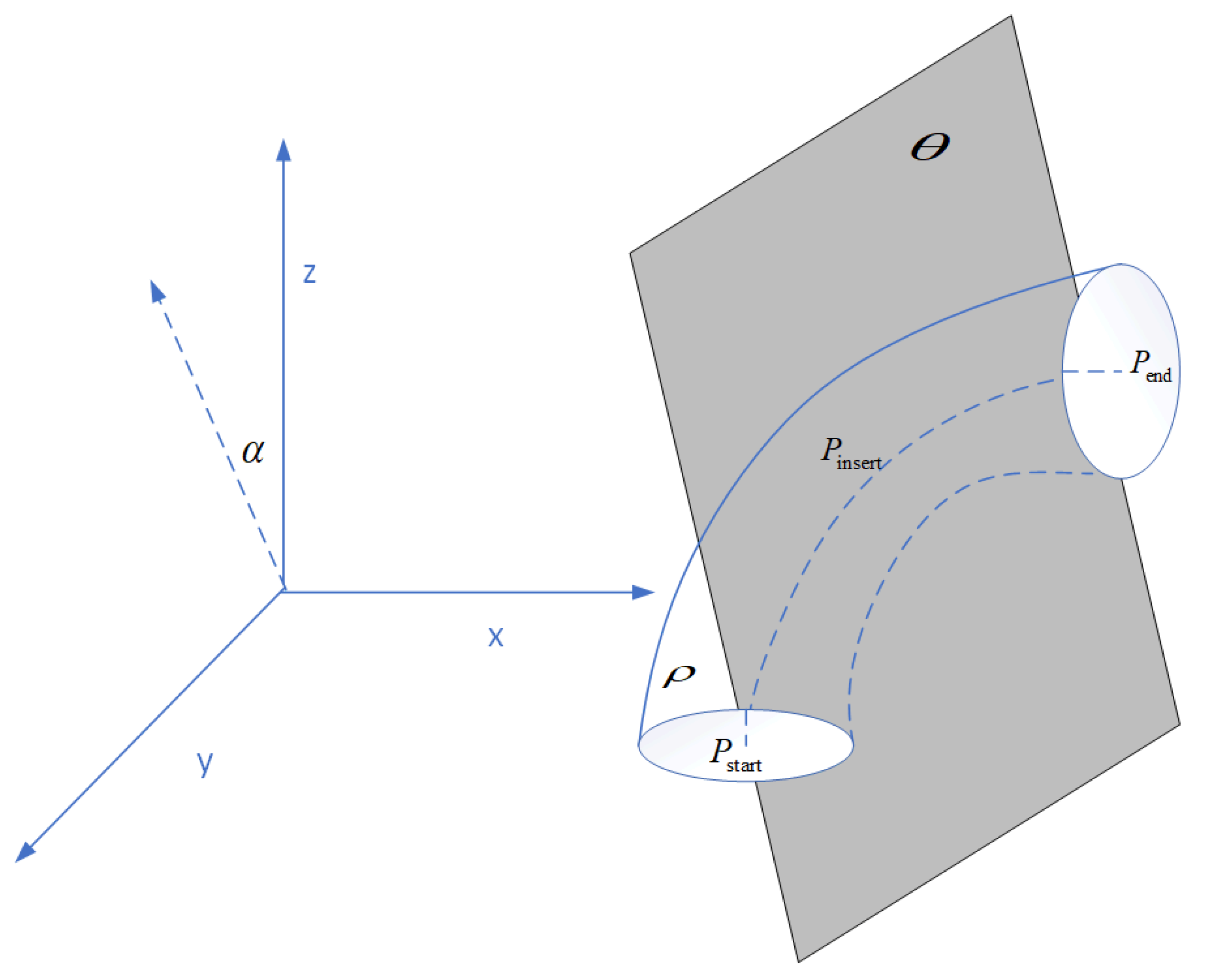
3.2. Path Planning Based on Cartesian Space Motion Curve Continuity
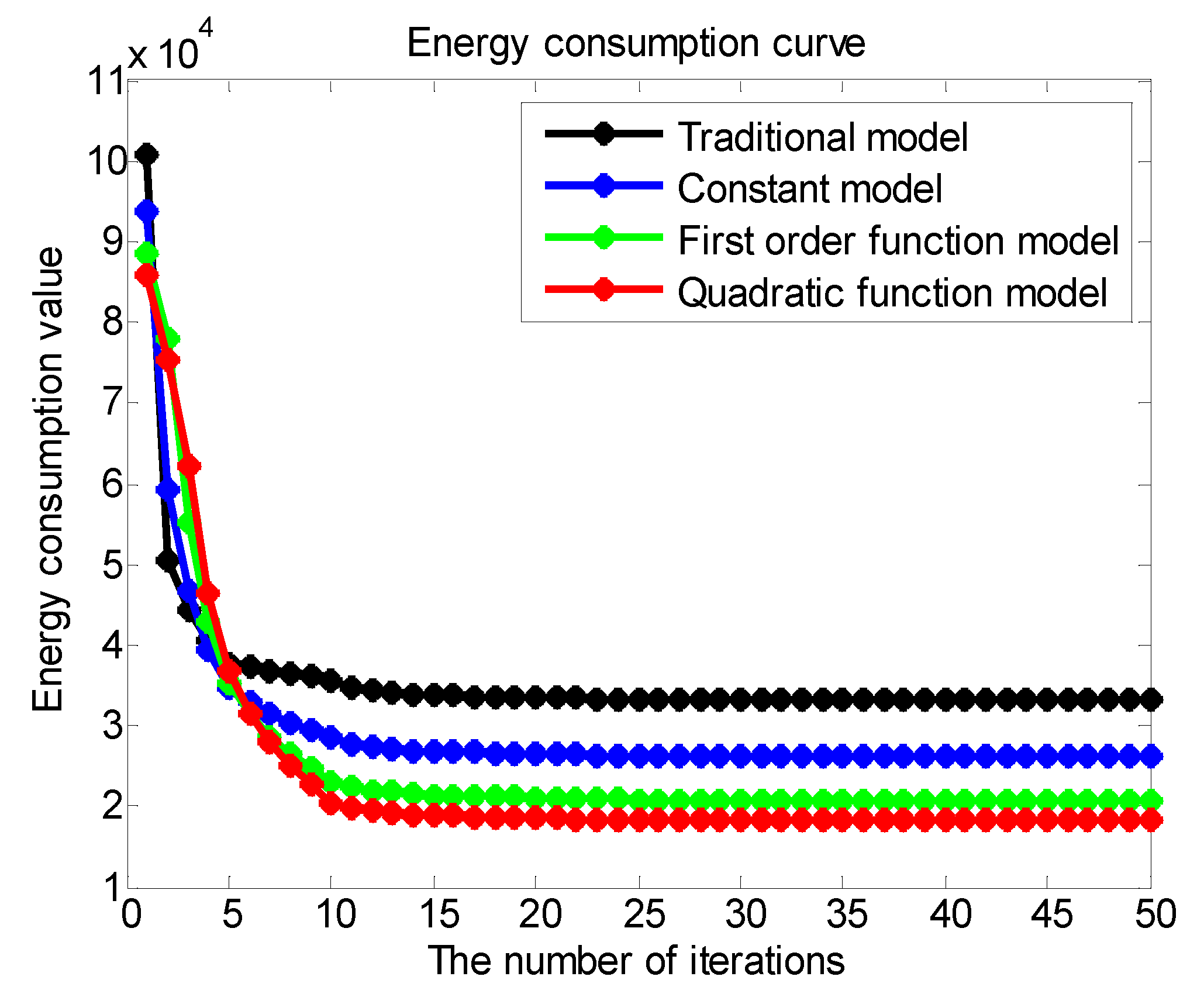
3.3. Trajectory Solving Based on Improved Adaptive PSO
4. Example of Imitated Inchworm Robot Movement Planning
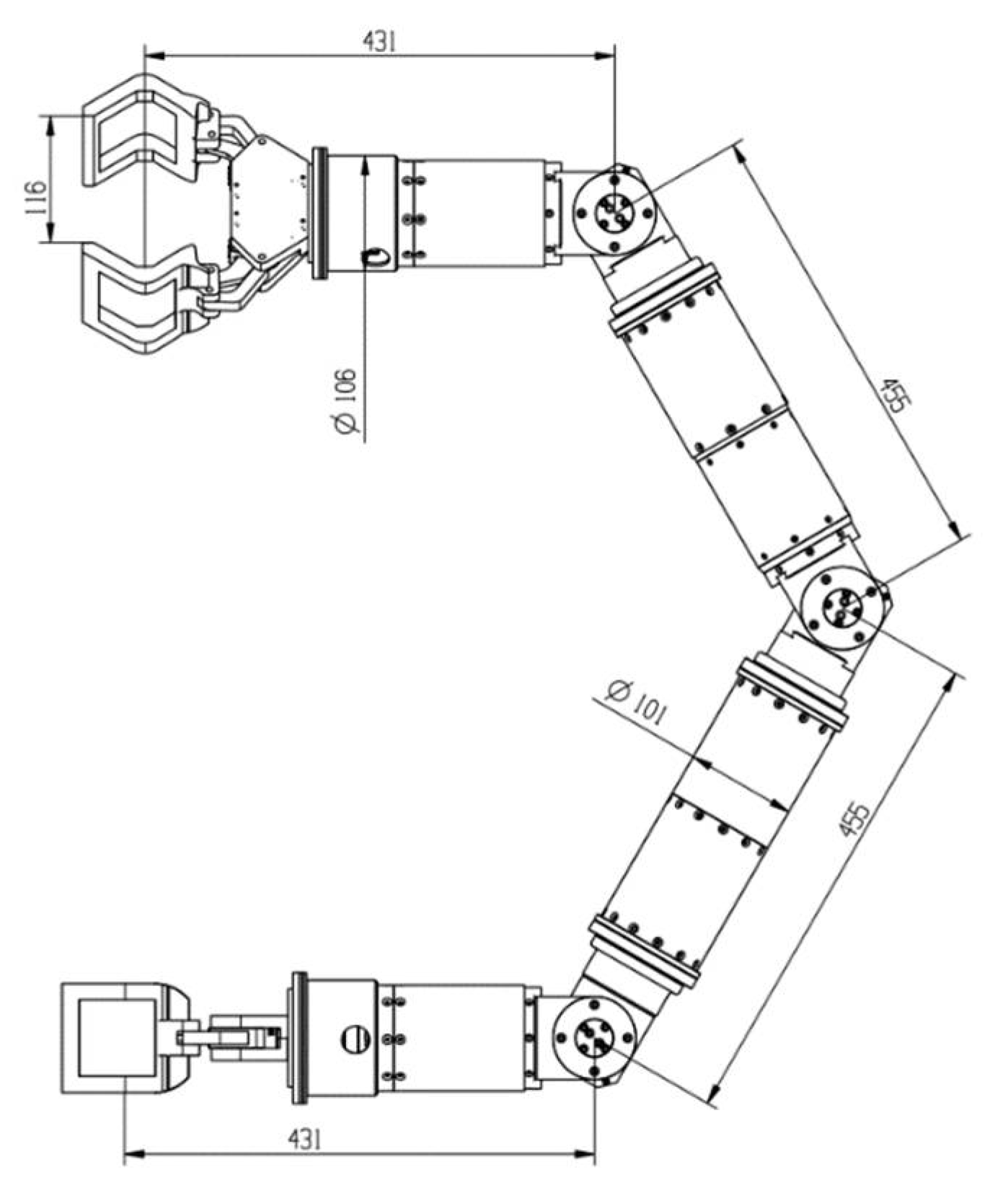
4.1. Dynamic Parameters of the Inchworm Robot Imitation
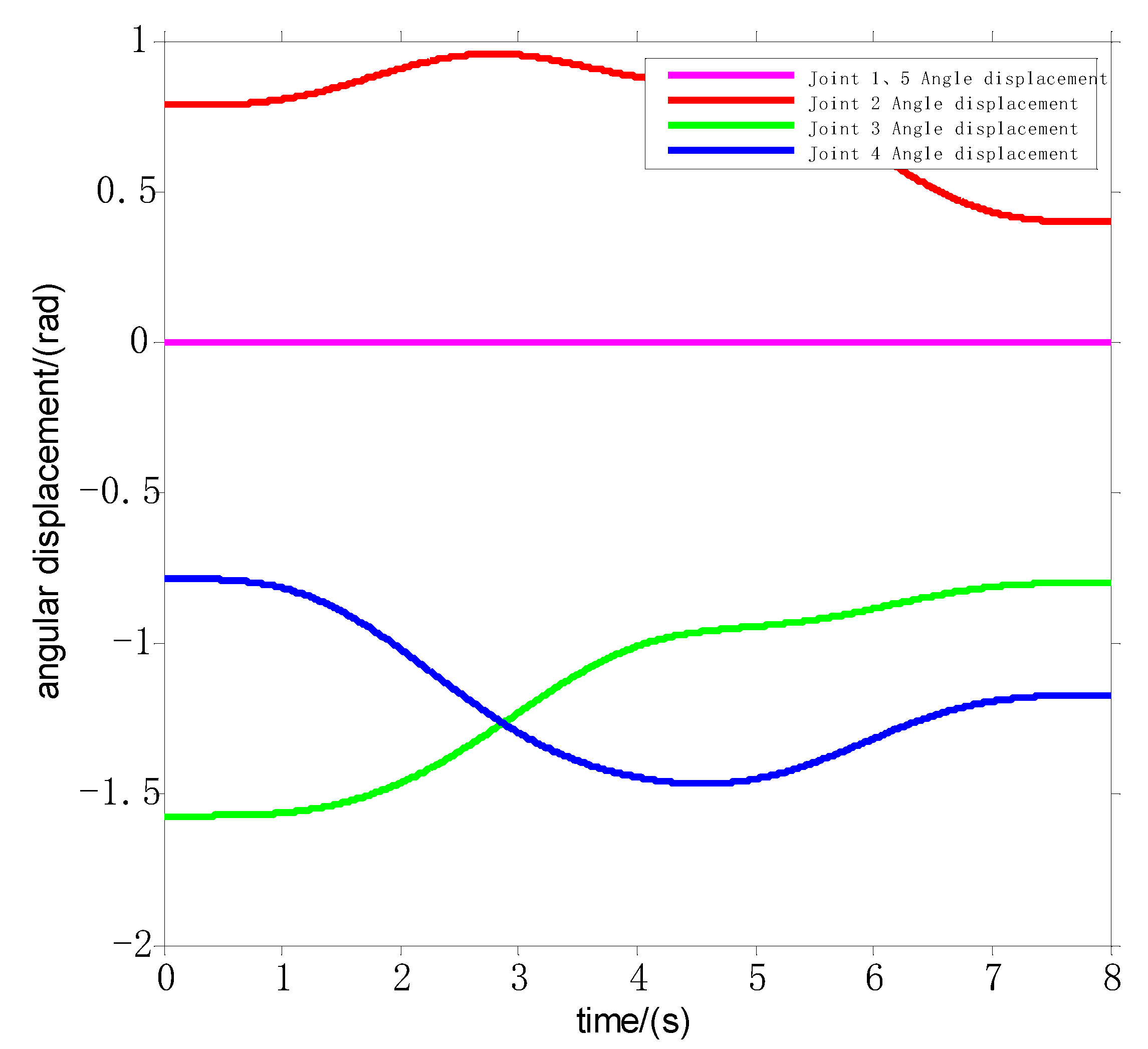
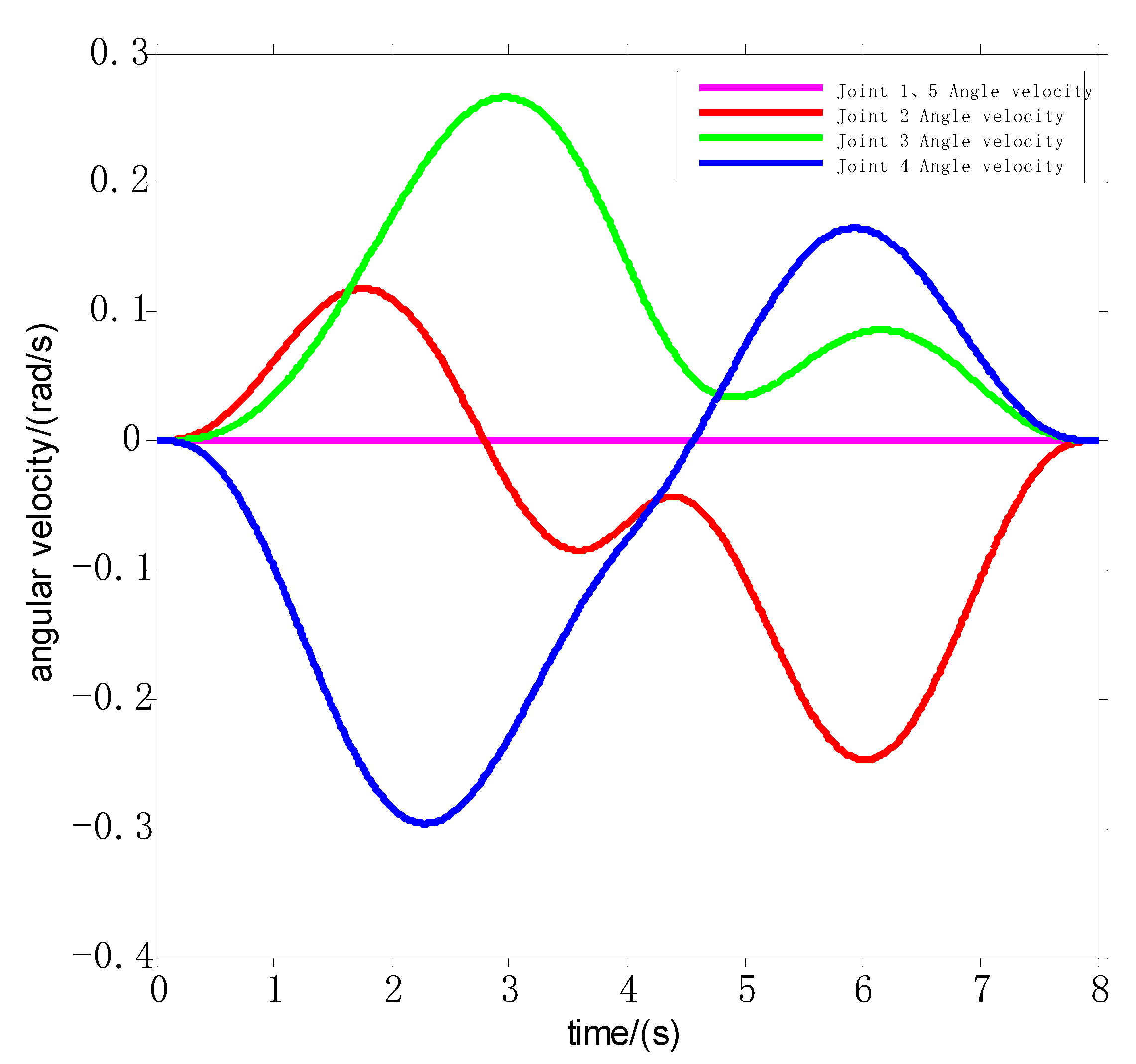
4.2. Simulation Experiment of the Inchworm Robot Climbing a Straight Bar
5. Analysis and Discussion of the Model
6. Conclusions
- How to better define the relationship between the energy consumption of the robot’s movement and the torque of each joint, and how to couple the energy loss, which is difficult to describe in the process of the robot movement, with the path of and time required for the robot movement.
- The “error tracking” method defined in this paper is a pseudo-smooth path method. We should consider how to better ensure the relative smoothness of the Cartesian space curve when the robot joint trajectory is smooth and approximates to the space smooth curve.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- The State Council. Notice of the State Council Concerning the Issuance of Made in China 2025 [EB/OL]. (2015-05-08) [2021-02-12]. Available online: http://www.gov.cn/zhengce/content/2015-05/19/content9784.htm (accessed on 15 January 2022).
- Kunze, L.; Hawes, N. Artificial intelligence for long-term robot autonomy: A survey. IEEE Robot. Autom. Lett. 2018, 3, 4023–4030. [Google Scholar] [CrossRef]
- Datouo, R.; Motto, F.B. Optimal Motion Planning for Minimizing Energy Consumption of Wheeled Mobile Robots. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017. [Google Scholar]
- Song, B.; Wang, Z. An Improved PSO Algorithm for Smooth Path Planning of Mobile Robots Using Continuous High-degree Bezier Curve. Appl. Soft Comput. 2021, 100, 106960. [Google Scholar] [CrossRef]
- Zhou, M.; Wang, Z. Multi-objective Path Planning Based on An Improved GWO-WOA Method. In Proceedings of the 7th International Workshop on Advanced Computational Intelligence and Intelligent Informatics, Beijing, China, 31 October–3 November 2021. [Google Scholar]
- Wang, J.; Chi, W. Neural RRT *: Learning-Based Optimal Path Planning. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1748–1758. [Google Scholar] [CrossRef]
- Zhang, T.; Zhang, M. Time-optimal and Smooth Trajectory Planning for Robot Manipulators. Int. J. Control. Autom. Syst. 2020, 19, 521–531. [Google Scholar] [CrossRef]
- Chai, R.; Tsourdos, A. Real-Time Reentry Trajectory Planning of Hypersonic Vehicles: A Two-Step Strategy Incorporating Fuzzy Multiobjective Transcription and Deep Neural Network. IEEE Trans. Ind. Electron. 2020, 67, 6904–6915. [Google Scholar] [CrossRef]
- Shen, P.; Zhang, X. Complete and Time-Optimal Path-Constrained Trajectory Planning With Torque and Velocity Constraints: Theory and Applications. IEEE/ASME Trans. Mechatron. 2018, 23, 735–746. [Google Scholar] [CrossRef]
- Jiang, L.; Guan, Y.S. Energy Optimal Climbing Motion Planning for Pole Climbing Robot. Robot 2017, 39, 16–22. [Google Scholar]
- Everett, M.; Yu, F.C. Motion Planning Among Dynamic, Decision-Making Agents with Deep Reinforcement Learning. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Priyadarshi, N.; Padmanaban, S. An Experimental Estimation of Hybrid ANFIS–PSO-Based MPPT for PV Grid Integration Under Fluctuating Sun Irradiance. IEEE Syst. J. 2020, 14, 1218–1229. [Google Scholar] [CrossRef]
- Dasgupta, K.; Mandal, B. A Genetic Algorithm (GA) based Load Balancing Strategy for Cloud Computing. Procedia Technol. 2013, 10, 340–347. [Google Scholar] [CrossRef]
- Li, X.; Liang, G. An Effective Hybrid Genetic Algorithm and Tabu Search for Flexible Job Shop Scheduling Problem. Int. J. Prod. Econ. 2016, 174, 93–110. [Google Scholar] [CrossRef]
- Alhadawi, H.S.; Majid, M.A. A Novel Method of S-box Design Based on Discrete Chaotic Maps and Cuckoo Search Algorithm. Multimed. Tools Appl. 2021, 80, 7333–7350. [Google Scholar] [CrossRef]
- Zivkovic, M.; Bacanin, N. COVID-19 Cases Prediction by Using Hybrid Machine Learning and Beetle Antennae Search Approach. Sustain. Cities Soc. 2021, 66, 102669. [Google Scholar] [CrossRef] [PubMed]
- Huang, Y.; Ding, H. A Motion Planning and Tracking Framework for Autonomous Vehicles Based on Artificial Potential Field-Elaborated Resistance Network (APFE-RN) Approach. IEEE Trans. Ind. Electron. 2019, 67, 1376–1386. [Google Scholar] [CrossRef]
- Gregory, J.; Olivares, A. Energy-optimal Trajectory Planning for Robot Manipulators with Holonomic Constraints. Syst. Control. Lett. 2012, 61, 279–291. [Google Scholar] [CrossRef]
- Cho, M.; Ameya, J. Differentiable Programming for Piecewise Polynomial Functions. In Proceedings of the 1st Workshop on Learning Meets Combinatorial Algorithms, Vancouver, WA, Canada, 6–12 December 2020. [Google Scholar]
- Fang, S.; Ma, X. Trajectory Planning for Seven-DOF Robotic Arm Based on Seventh Degree Polynomial. Proc. Chin. Intell. Syst. Conf. 2019, 593, 286–294. [Google Scholar]
- Seguin, B.; Chen, Y.C. Bridging the Gap between Rectifying Developables and Tangent Developables: A Family of Developable Surfaces Associated with A Space Curve. Proc. R. Soc. A Math. Phys. Eng. Sci. 2021, 477, 20200617. [Google Scholar] [CrossRef]
- Li, H.; Yao, H.H. Linear Reformulation of Polynomial Discrete Programming for Fast Computation. INFORMS J. Comput. 2017, 29, 108–122. [Google Scholar] [CrossRef]
- Du, S.S.; Lee, J.D. Gradient Descent Finds Global Minima of Deep Neural Networks. In Proceedings of the 36th International Conference on Machine Learning, Long Beach, CA, USA, 9 November 2018. [Google Scholar]
- Deng, W.; Yao, R. A Novel Intelligent Diagnosis Method Using Optimal LS-SVM with Improved PSO Algorithm. Soft Comput. A Fusion Found. Methodol. Appl. 2019, 23, 2445–2462. [Google Scholar] [CrossRef]
- Papernot, N.; Thakurta, A. Tempered Sigmoid Activations for Deep Learning with Differential Privacy. Proc. AAAI Conf. Artif. Intell. 2020, 35, 9312–9321. [Google Scholar]
- Hua, N.; Zhao, Y.L. Task Allocation Method of Mobile Communication Support Based on Improved PSO Algorithm. Control. Decis. Mak. 2018, 33, 1575–1583. [Google Scholar]
- Liu, F.; Cai, M. An Ensemble Model Based on Adaptive Noise Reducer and Over-Fitting Prevention LSTM for Multivariate Time Series Forecasting. IEEE Access 2019, 7, 26102–26115. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
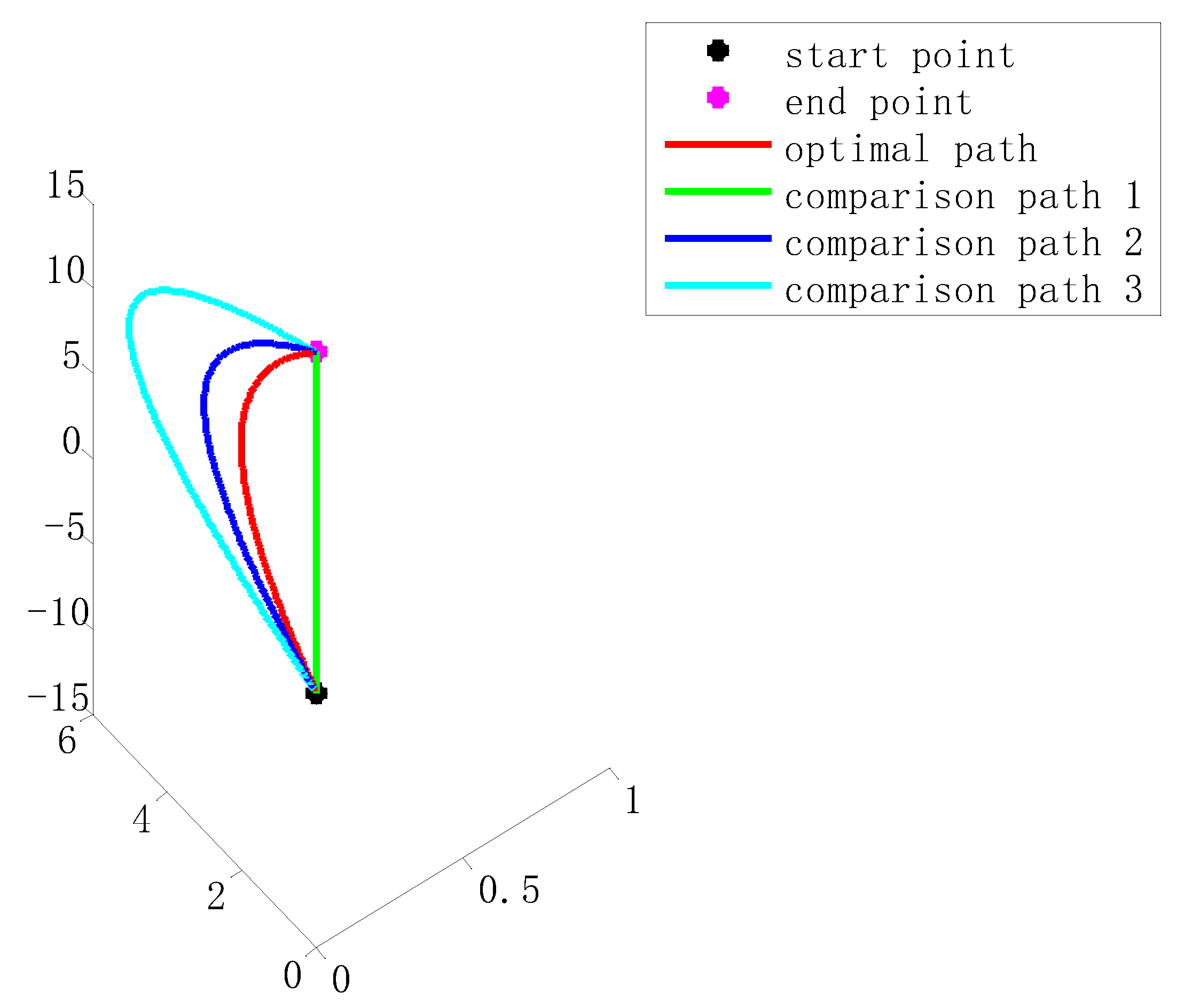
| Path | Pinsert | Rmax | α | |
|---|---|---|---|---|
| Optimal path | (0, 5, 7.5) | 5 | 0 | (2.5, 0, 2.5) |
| Comparison path 1 | (0, 0, 7.5) | 5 | 0 | (0, 0, 0) |
| Comparison path 2 | (0, 10, 7.5) | 5 | 0 | (5, 0, 5) |
| Comparison path 3 | (0, 15, 7.5) | 5 | 0 | (10, 0, 10) |
| Path | Movement Time/ | Energy Consumption/(N2·m2·s) | Maximum Moment/(N·m) |
|---|---|---|---|
| Optimal path | 8 | 1.97 104 | 97 |
| Comparison path 1 | 8 | 2.28 104 | 100 |
| Comparison path 2 | 8 | 2.06 104 | 106 |
| Comparison path 3 | 8 | 2.66 104 | 128 |
| Algorithm | Number of Iterations/Time | Energy Consumption/(N2·m2·s) | Solution Time/s |
|---|---|---|---|
| Improved adaptive PSO | 50 | 1.97 104 | 168 |
| GA | 50 | 2.86 104 | 288 |
| TS | 50 | 2.68 104 | 246 |
| CS | 50 | 2.44 104 | 229 |
| BAS | 50 | 2.51 104 | 235 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, B.; Wang, J.; Huang, Z.; Zhou, W.; Zheng, X.; Qi, S. Motion Planning of an Inchworm Robot Based on Improved Adaptive PSO. Processes 2022, 10, 1675. https://doi.org/10.3390/pr10091675
Wang B, Wang J, Huang Z, Zhou W, Zheng X, Qi S. Motion Planning of an Inchworm Robot Based on Improved Adaptive PSO. Processes. 2022; 10(9):1675. https://doi.org/10.3390/pr10091675
Chicago/Turabian StyleWang, Binrui, Jianxin Wang, Zhenhai Huang, Weiyi Zhou, Xiaofei Zheng, and Shunan Qi. 2022. "Motion Planning of an Inchworm Robot Based on Improved Adaptive PSO" Processes 10, no. 9: 1675. https://doi.org/10.3390/pr10091675