
Study on Piezomagnetic Effect of Iron Cobalt Alloy and Force Sensor

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
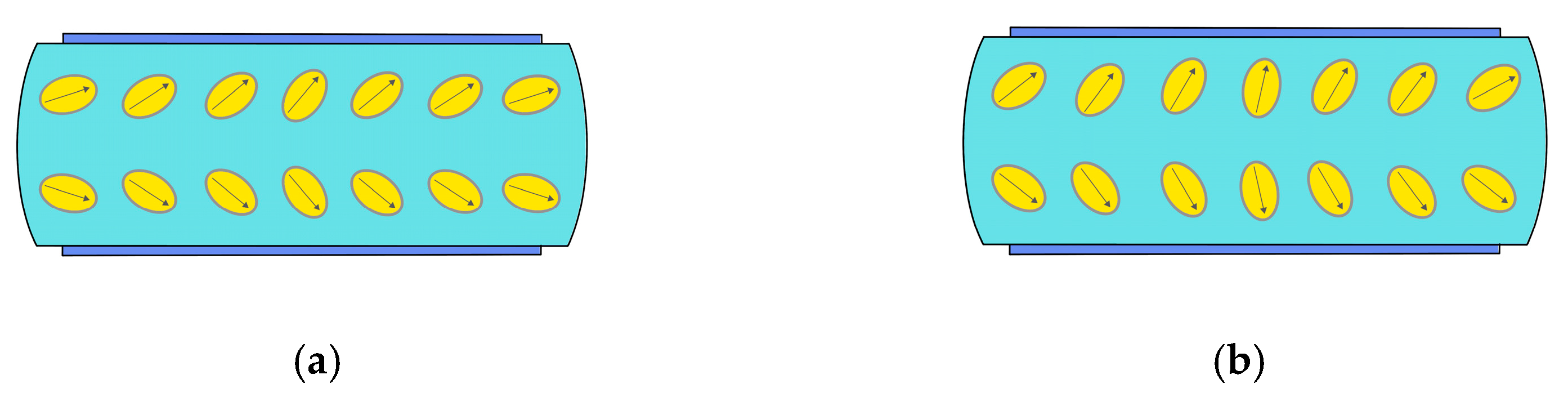
2. Principle and Model of Piezomagnetic Effect
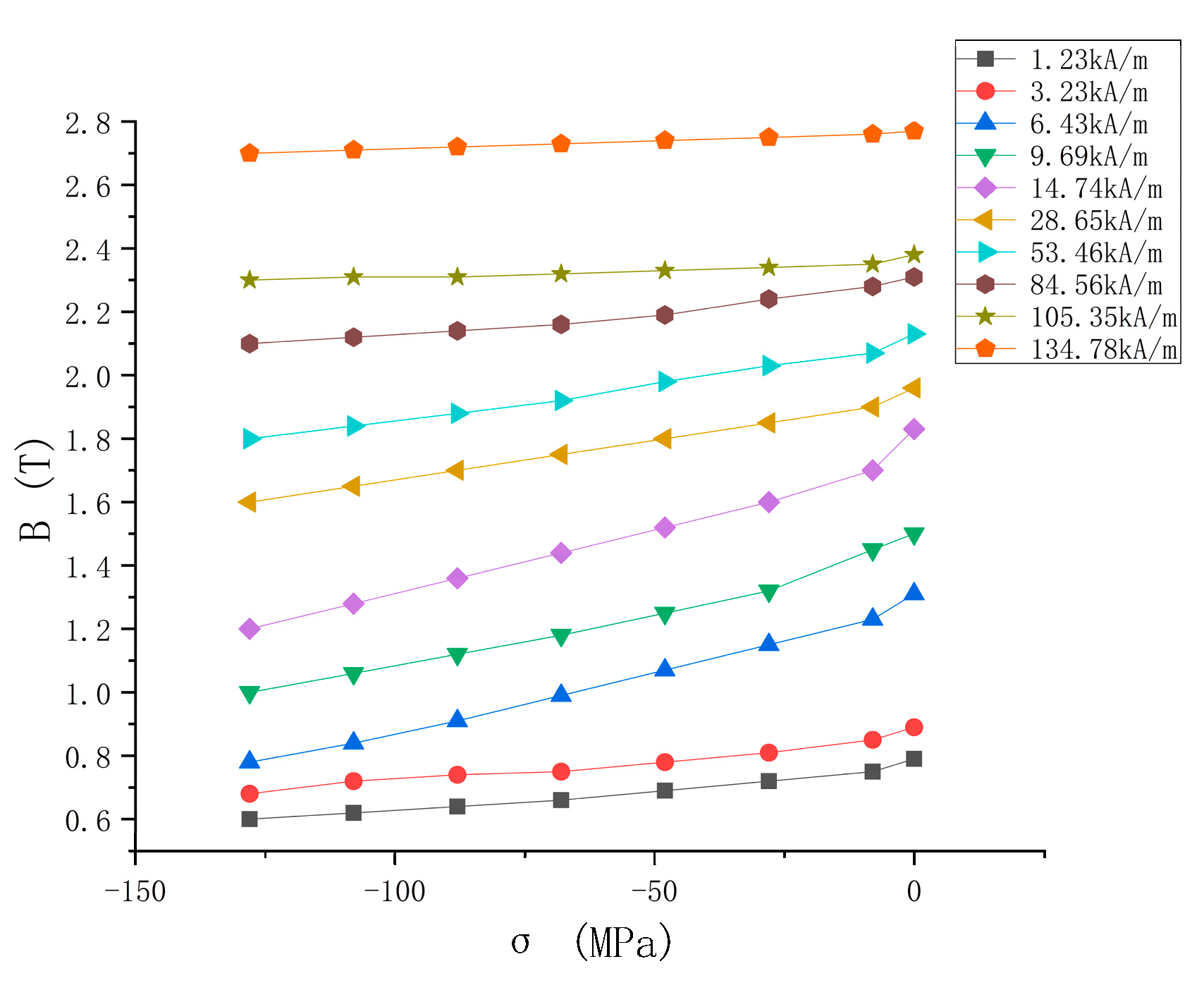
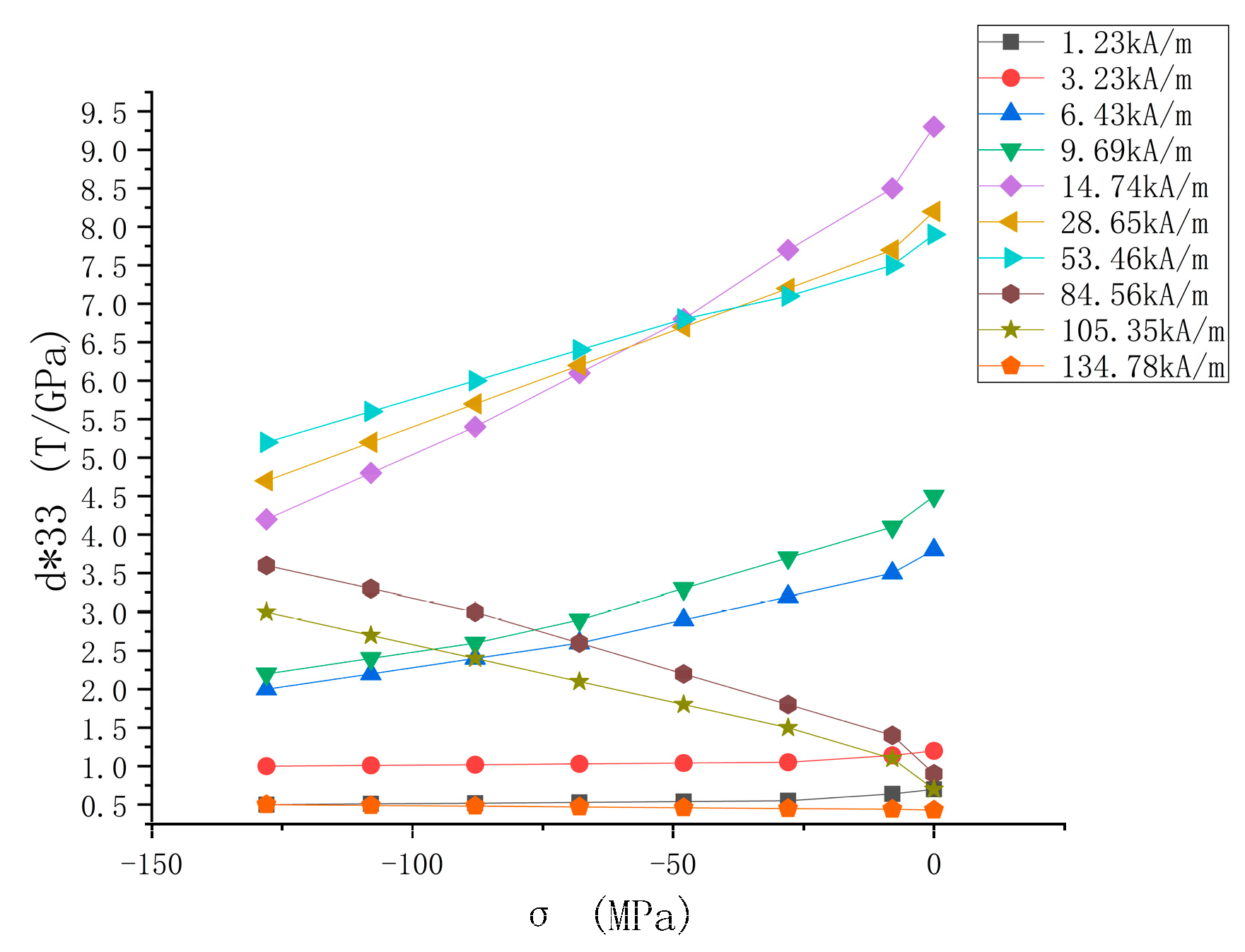
3. Simulation Results and Analysis
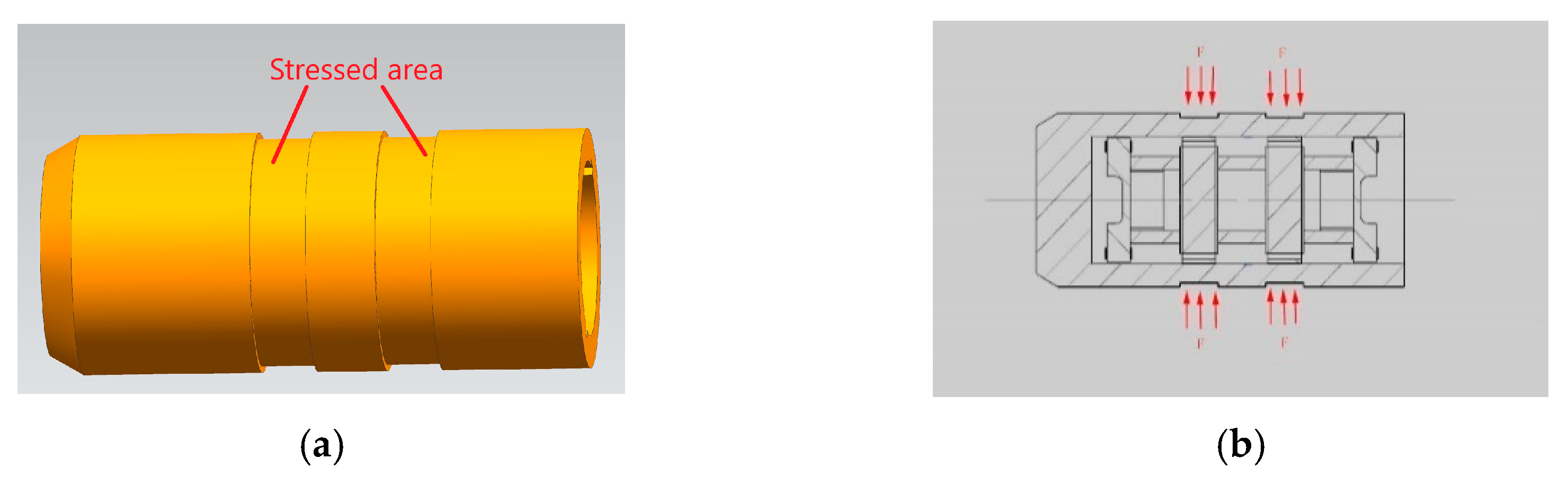
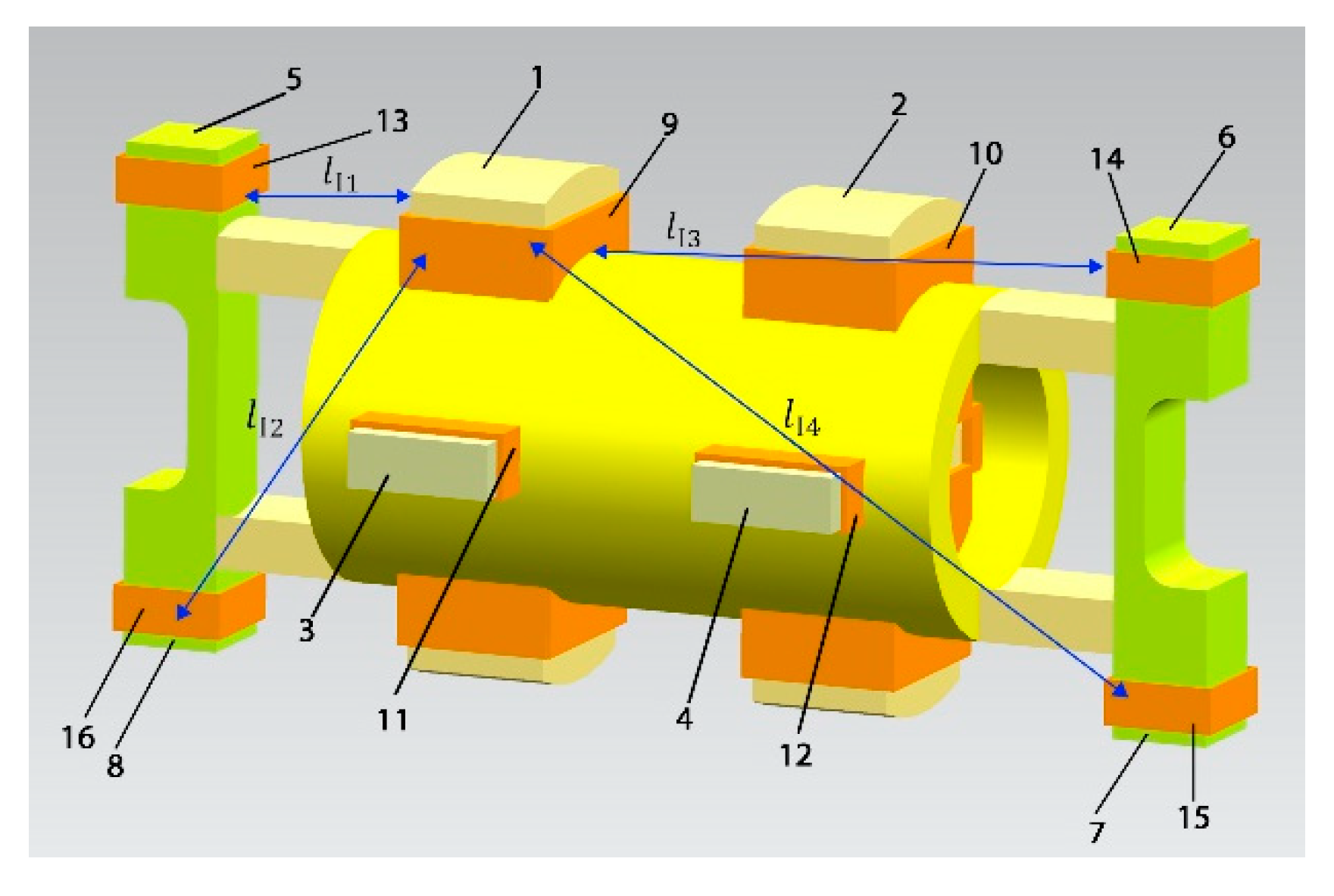
4. Design of Magnetostrictive Force Sensor
Sensor Structure
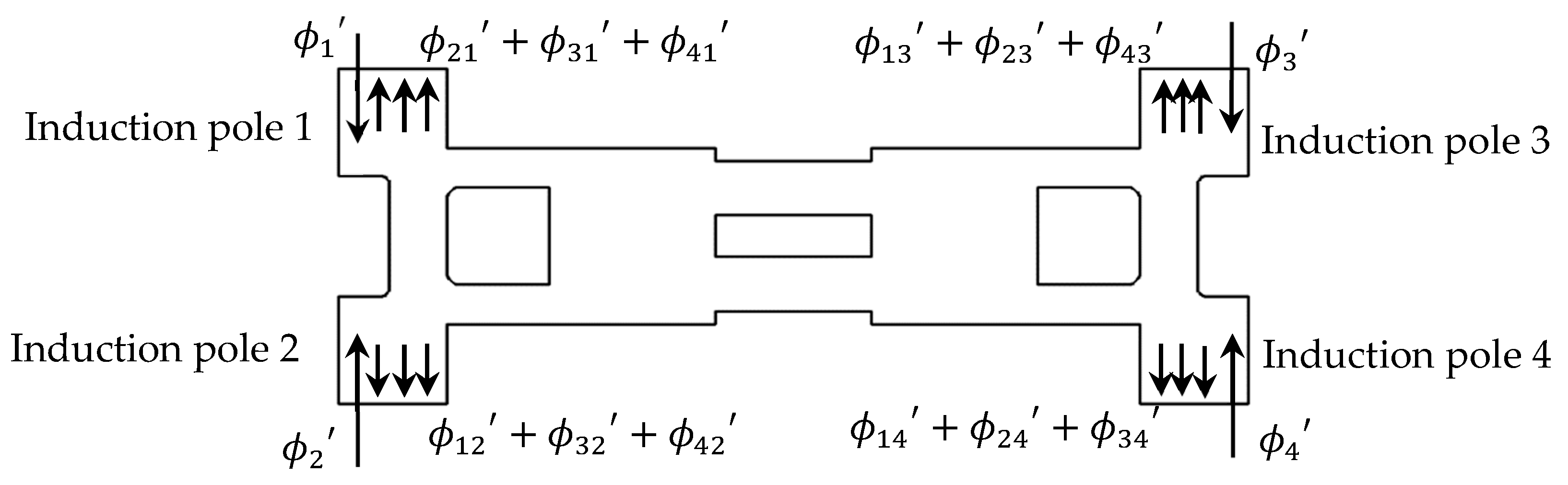
5. Mathematical Analysis of Magnetic Circuit
5.1. Horizontal Magnetic Circuit Structure
5.2. Vertical Magnetic Circuit Structure
5.3. Magnetic Circuit Analysis under Stress
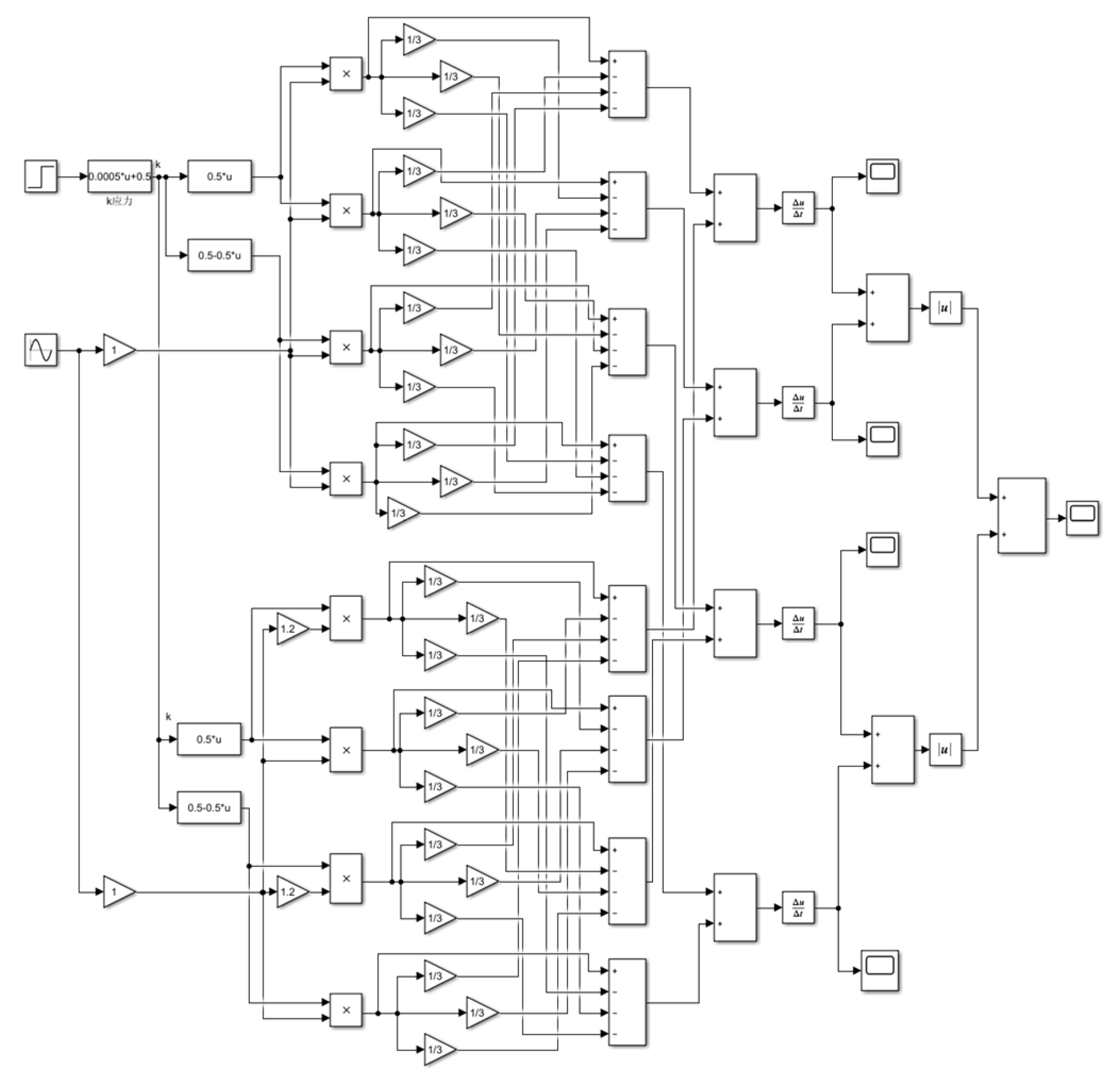
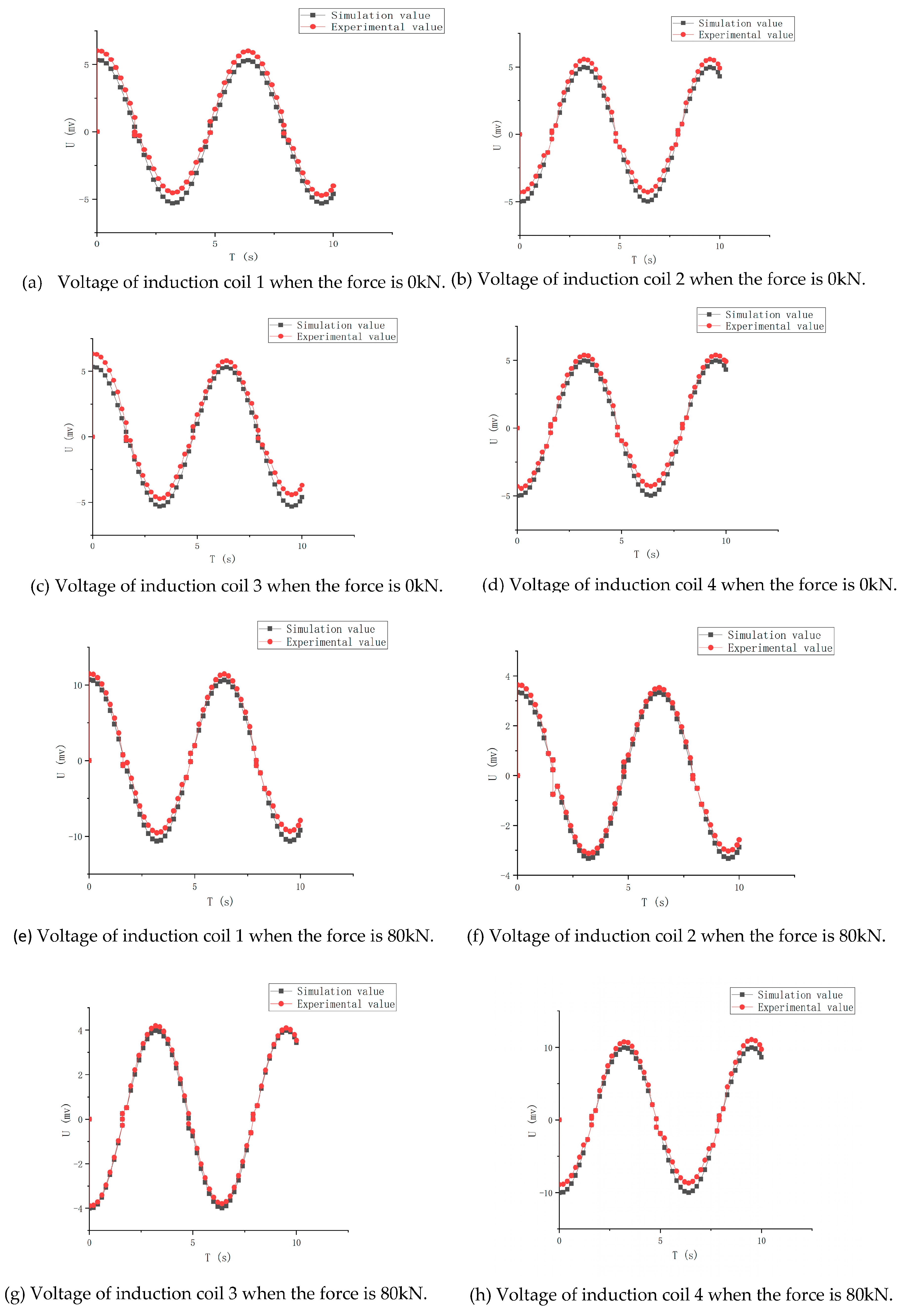
6. Sensor Simulation and Experimental Analysis
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ren, W.B. Annealing Process of Precise Control Magnetic Properties of Permalloy. Heat Treat. Met. 2004, 29, 68. [Google Scholar]
- Ohnuma, I.; Enoki, H.; Ikeda, O.; Kainuma, R.; Ohtani, H.; Sundman, B.; Ishida, K. Phase equilibria in the Fe–Co binary system. Acta Mater. 2002, 50, 379–393. [Google Scholar] [CrossRef]
- Zhu, Q.; Li, L.; Masteller, M.S.; Del Corso, G.J. An increase of structural order parameter in Fe–Co–V soft magnetic alloy after thermal aging. Appl. Phys. Lett. 1996, 69, 3917. [Google Scholar] [CrossRef]
- Duck, H.A.; Zhang, D.Z.; Liang, D.; Luzin, V.; Cammarata, R.C.; Leheny, R.L.; Chien, C.L.; Weihs, T.P. Temperature dependent mechanical properties of ultra-fine grained FeCo–2V. Acta Mater. 2003, 51, 4083. [Google Scholar]
- Dai, W.M.; Yin, H.; Ye, M.J. Fractal Structure of the Core Loss Spectrum of Fe-Co-V Soft Magnetic Alloy. J. Mater. Sci. Eng. 1996, 69, 50–53. [Google Scholar]
- Lafford, T.A.; Gibbs, M.R.J.; Zuberek, R.; Shearwood, C. Magnetostriction and magnetic properties of iron-cobalt alloys multilayered with silver. J. Appl. Phys. 1994, 76, 6534–6536. [Google Scholar] [CrossRef]
- Marco, C.; Filoppo, B.; Fumio, N. Fracture Behavior of Cracked Giant Magnetostrictive Materials in Three-Point Bending under Magnetic Fields: Strain Energy Density Criterion. Adv. Eng. Mater. 2016, 18, 2063–2069. [Google Scholar]
- Wohlfarth, E.P. Ferromagnetic Materials: A Handbook of Properties of Magnetically Ordered Matter; Publishing House of Electronics Industry: Beijing, China, 1993; pp. 122–130. [Google Scholar]
- Xie, X.L.; Wang, B.W.; Zhou, L.L.; Weng, L.; Sun, Y. Research on torsional ultrasonic attenuation characteristics of the magnetostrictive displacement sensor waveguide. Trans. China Electrotech. Soc. 2018, 33, 689–696. [Google Scholar]
- Tayalia, P.; Heider, D.; Gillespie, J.J.W. Characterization and theoretical modeling of magnetostrictive strainsensors. Sens. Actuators A Phys. 2004, 1, 267–274. [Google Scholar] [CrossRef]
- Chang, H.C.; Liao, S.C.; Hsieh, H.S.; Wen, J.H.; Lai, C.H.; Fang, W. Magnetostrictive type inductive sensing pressure sensor. Sens. Actuators A Phys. 2016, 238, 25–36. [Google Scholar] [CrossRef]
- Atulasimha, J.; Flatau, A.B.; Chopra, I.; Kellogg, R.A. Effect of stoichiometry on sensing behavior of iron-gallium. Proc. SPIE-Int. Soc. Opt. Eng. 2004, 5387, 487–497. [Google Scholar]
- Yoo, J.H.; Jones, N.J. A performance prediction for Fe Ga magnetostrictive strain sensor using simplified model. IEEE Trans. Magn. 2017, 53, 1–4. [Google Scholar] [CrossRef]
- Tong, J.; Jia, Y.; Zhang, W. Study on SAW Current Sensor Based on Magnetostrictive Effect. Piezoelectrics Acoustooptics 2017, 39, 662–706. [Google Scholar]
- Yang, C.H.; Wen, Y.M.; Li, P.; Bian, L.-X. Influence of bias magnetic field on magnetoelectric effect of magnetostrictive/elastic/piezoelectric. laminated composite. Acta Phys. Sin. 2008, 57, 7292–7297. [Google Scholar] [CrossRef]
- Downey, P.R. Characterization of Bending Magnetostriction in Iron-Gallium Alloys for Nanowire Sensor Applications. Ph.D. Thesis, University of Maryland, College Park, MD, USA, 2008; pp. 4649–4661. [Google Scholar]
- Cui, X.X.; Whang, B.W.; Li, M.M. Analysis of Output Characteristics and Influencing Factors of Magnetostrictive Force Sensor. Chin. J. Sens. Actuators 2019, 32, 1624–1628. [Google Scholar]
- Zhao, X.; Luo, X.W.; Wells, L.G. Development of continuous measurement system for soil resistance. Trans. Chin. Soc. Agric. Eng. 2009, 25, 67–71. [Google Scholar]
- Xu, C.L.; Li, L.H.; Zhao, D.Y.; Li, X.; Li, M.; Zhang, W. Field real-time testing system for measuring work dynamic parameters of suspension agricultural implement. Trans. Chin. Soc. Agric. Mach. 2013, 44, 83–88. [Google Scholar]
- Feng, J.X.; Zhao, X.; Ma, J.J. Advance on measurement of soil mechanical resistance. Agric. Eng. 2013, 3, 1–4. [Google Scholar]
- Liu, H.F.; Jia, Z.Y.; Wang, F.J.; Ge, C.-Y. Giant magnetostrictive force sensor and its experimental study. J. Dalian Univ. Technol. 2011, 51, 832–836. [Google Scholar]
- Han, J.Y.; Gao, X. Development of a shaft type sensor for measuring tractor pull force. Agric. Equip. Veh. Eng. 2014, 52, 10–13. [Google Scholar]
- Fan, C.Z.; Yang, Q.X.; Yang, W.R.; Yan, R.-g.; Sun, J.-f.; Liu, F.-g. Gian tmagnetostritive force sensor based on inverse magnetostritive effect. Instrum. Tech. Sens. 2007, 4, 5–7. [Google Scholar]
- Shi, Y.P.; Ni, L.X.; Zhou, Q.G. Study on a new electromagnetic film pressure sensor based on the magnetoelasticity effect. Chin. J. Sens. Actuators 2010, 23, 1256–1260. [Google Scholar]
- Yu, W.H.; Tian, H.; Liang, C.; Li, C.; Zhao, Y. Soil compactness measuring method based on acceleration compensation and sensor design. Trans. Chin. Soc. Agric. Mach. 2017, 48, 50–256. [Google Scholar]
- Zhao, D.; Xiao, J.X.; Liu, Y. Overview of smart sensor technology. Transducer Microsyst. Technol. 2014, 33, 4–7. [Google Scholar]
- Zheng, X.J.; Liu, X.E. A nonlinear constitutive model for Terfenol-D rods. J. Appl. Phys. 2005, 97, 61. [Google Scholar] [CrossRef]
- Wang, B.W. Preparation of Giant Magnetostrictive Materials and Device Design; Metallurgical Industry Press: Beijing, China, 2003; pp. 68–100. [Google Scholar]
- Electronic and Hydraulic Hitch Control. Available online: www.boschrexroth.com (accessed on 30 May 2020).















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, R.; Liu, J.; Xu, J.; Ding, X.; Cheng, Y.; Liu, Q. Study on Piezomagnetic Effect of Iron Cobalt Alloy and Force Sensor. Processes 2022, 10, 1218. https://doi.org/10.3390/pr10061218
Li R, Liu J, Xu J, Ding X, Cheng Y, Liu Q. Study on Piezomagnetic Effect of Iron Cobalt Alloy and Force Sensor. Processes. 2022; 10(6):1218. https://doi.org/10.3390/pr10061218
Chicago/Turabian StyleLi, Ruichuan, Jilu Liu, Jikang Xu, Xinkai Ding, Yi Cheng, and Qi Liu. 2022. "Study on Piezomagnetic Effect of Iron Cobalt Alloy and Force Sensor" Processes 10, no. 6: 1218. https://doi.org/10.3390/pr10061218