
Dynamically Triggering Resilient Control for Networked Nonlinear Systems under Malicious Aperiodic DoS Attacks

Abstract
:1. Introduction
- Different from the static trigger strategy in [22,23,24], a novel dynamically triggering strategy is proposed for NNSs with aperiodic DoS attacks. Because of the longer trigger intervals compared with the static trigger intervals, this strategy further reduces the sampling data transmission rate and improves the usage of network resources.
- Compared with the trigger strategy in [23], the dynamically triggering resilient control strategy is introduced into nonlinear systems to obtund the influence of aperiodic DoS attacks. In addition, the sampled data cannot be transmitted even if condition (7) is satisfied since aperiodic DoS attacks will result in the loss of control input during the DoS attacks range.
- Compared with [23], a new piecewise Lyapunov function is designed to ensure the exponential stability of the networked control system under DoS attacks. In particular, the minimum inter-event time excludes Zeno behavior in the resilient controller. Moreover, the proposed method not only releases Assumption 4 in [23] but also reduces the conservative of the system.
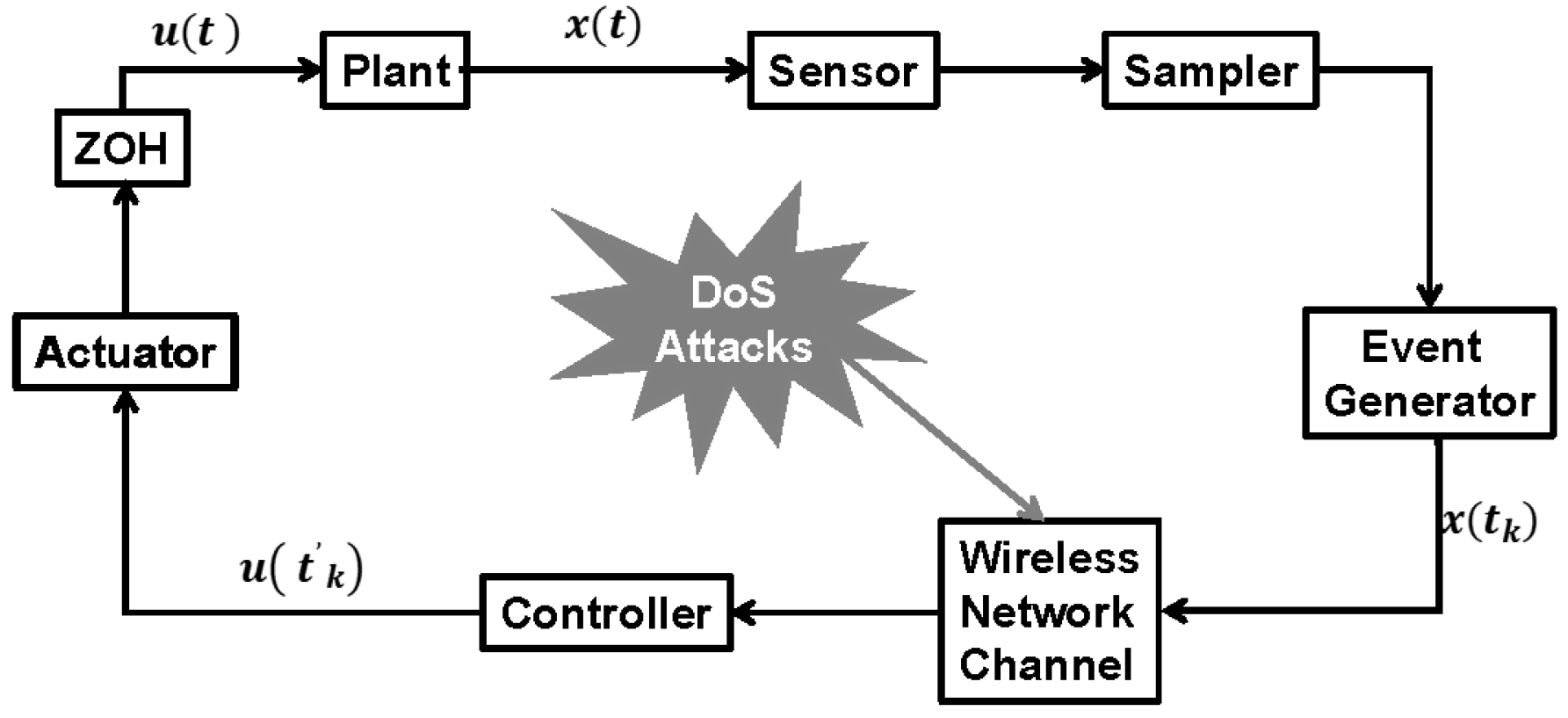
2. Problem Formulation
2.1. Networked Nonlinear Systems
- 1.
- A function is called a class of if it is continuous, strictly increasing and . If and also as , then it is said to be of class .
- 2.
- A function is called a class of if the function for all fixed and the function is decreasing and as for all fixed .
2.2. Aperiodic DoS Attacks
3. Main Result
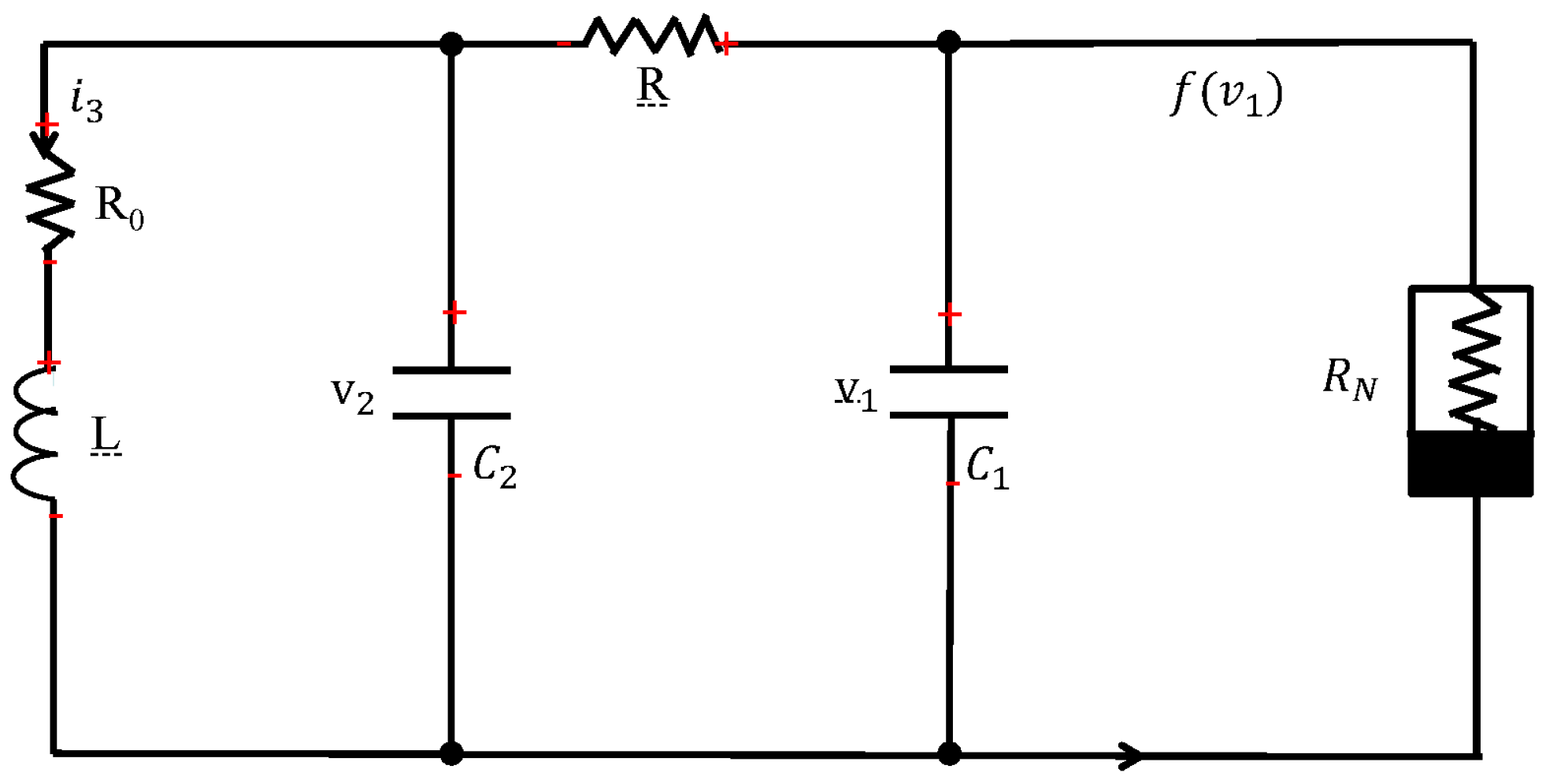
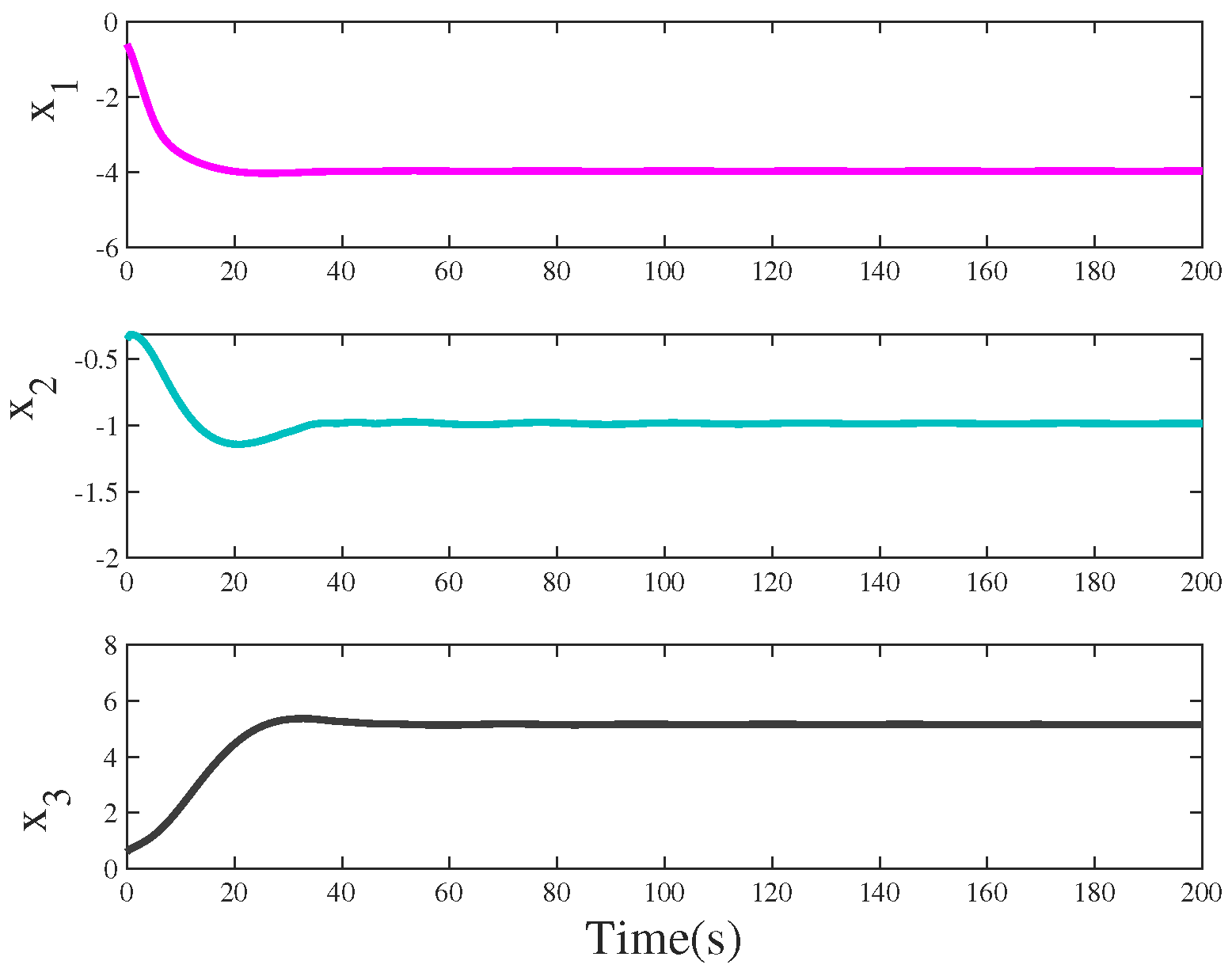
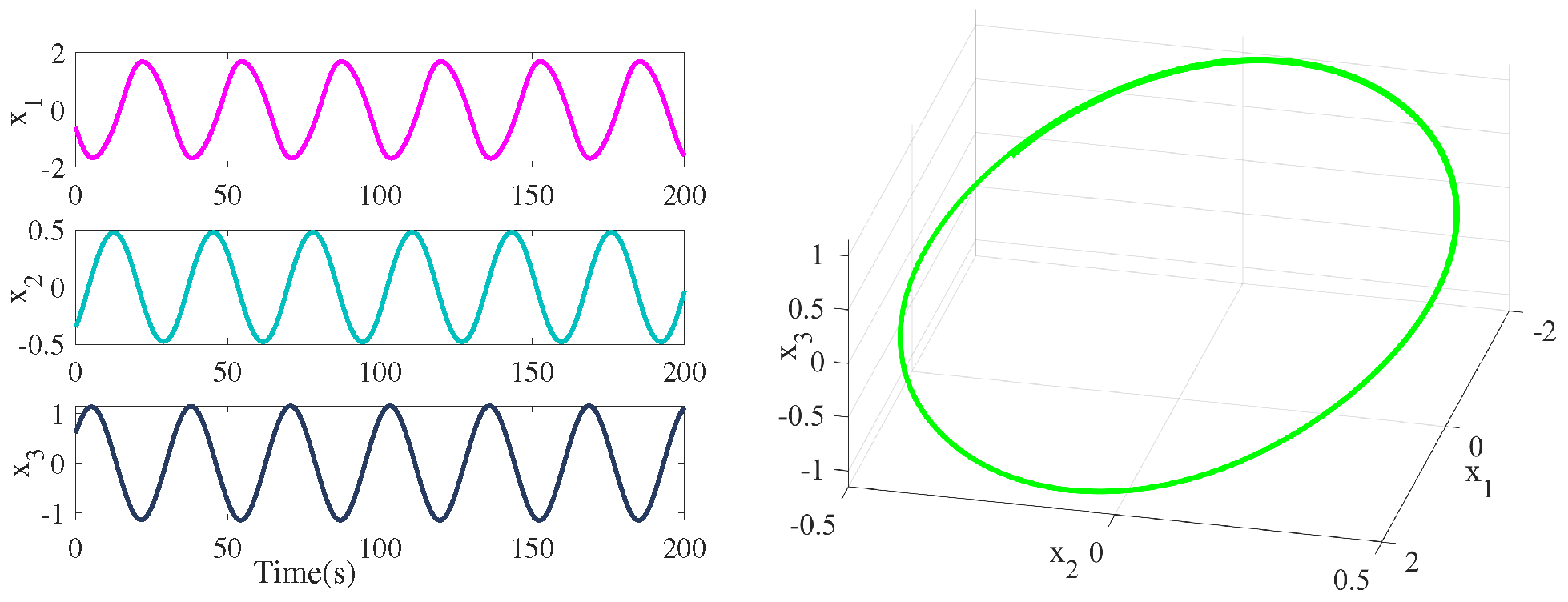
4. Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Chen, C.; Nagananda, K.G.; Xiong, G.; Kishore, S.; Snyder, L.V. A communication-based appliance scheduling scheme for consumer-premise energy management systems. IEEE Trans. Smart Grid 2013, 4, 56–65. [Google Scholar] [CrossRef]
- Saleh, M.; Esa, Y.; Mohamed, A.A. Communication-based control for DC microgrids. IEEE Trans. Smart Grid 2018, 10, 2180–2195. [Google Scholar] [CrossRef] [Green Version]
- Song, H.; Gao, S.; Li, Y.; Liu, L.; Dong, H. Train-centric communication based autonomous train control system. IEEE Trans. Intell. Vehicles 2022. [Google Scholar] [CrossRef]
- Heemels, W.P.M.H.; Johansson, K.H.; Tabuada, P. An introduction to event-triggered and self-triggered control. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 3270–3285. [Google Scholar]
- Tabuada, P. Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans. Autom. Control 2007, 52, 1680–1685. [Google Scholar] [CrossRef] [Green Version]
- Heemels, W.P.M.H.; Donkers, M.C.F.; Teel, A.R. Periodic event-triggered control for linear systems. IEEE Trans. Autom. Control 2012, 58, 847–861. [Google Scholar] [CrossRef]
- Wang, W.; Postoyan, R.; Nešić, D.; Heemels, W.P. Periodic event-triggered control for nonlinear networked control systems. IEEE Trans. Autom. Control 2019, 65, 620–635. [Google Scholar] [CrossRef] [Green Version]
- Sun, J.; Yang, J.; Zeng, Z. Predictor-based periodic event-triggered control for nonlinear uncertain systems with input delay. Automatica 2022, 136, 110055. [Google Scholar] [CrossRef]
- Girard, A. Dynamic Triggering Mechanisms for Event-Triggered Control. IEEE Trans. Autom. Control 2015, 60, 1992–1997. [Google Scholar] [CrossRef] [Green Version]
- Luo, S.; Deng, F.; Chen, W.H. Dynamic event-triggered control for linear stochastic systems with sporadic measurements and communication delay. Automatica 2019, 107, 86–94. [Google Scholar] [CrossRef]
- Dolk, V.S.; Borgers, D.P.; Heemels, W.P.M.H. Output-based decentralized dynamic event-triggered control with guaranteed -gain performance and zeno-freeness. IEEE Trans. Autom. Control 2017, 62, 34–49. [Google Scholar] [CrossRef]
- Demirel, B.; Leong, A.S.; Gupta, V.; Quevedo, D.E. Tradeoffs in stochastic event-triggered control. IEEE Trans. Autom. Control 2018, 64, 2567–2574. [Google Scholar] [CrossRef] [Green Version]
- Peng, C.; Wu, J.; Tian, E. Stochastic event-triggered H∞ control for networked systems under denial of service attacks. IEEE Trans. Syst. Man Cybern. Syst. 2021, 52, 4200–4210. [Google Scholar] [CrossRef]
- Han, D.; Mo, Y.; Wu, J.; Weerakkody, S.; Sinopoli, B.; Shi, L. Stochastic event-triggered sensor schedule for remote state estimation. IEEE Trans. Autom. Control 2015, 560, 2661–2675. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.; Liu, Y. Switching event-triggered control for a class of uncertain nonlinear systems. Automatica 2019, 108, 108471. [Google Scholar] [CrossRef]
- Fan, Y.; Huang, X.; Shen, H. Switching event-triggered control for global stabilization of delayed memristive neural networks: An exponential attenuation scheme. Neural Netw. 2019, 117, 216–224. [Google Scholar] [CrossRef]
- Li, H.; Chen, Z.; Wu, L.; Lam, H.K. Event-triggered control for nonlinear systems under unreliable communication links. IEEE Trans. Fuzzy Syst. 2016, 25, 813–824. [Google Scholar] [CrossRef]
- Li, Z.; Hu, B.; Li, M.; Luo, G. String stability analysis for vehicle platooning under unreliable communication links with event-triggered strategy. IEEE Trans. Veh. Technol. 2019, 68, 2152–2164. [Google Scholar] [CrossRef]
- Wang, J.; Ma, F.; Yang, Y.; Nie, J.; Bilin, A.G.; Guvenc, L. Adaptive event-triggered platoon control under unreliable communication links. Trans. Intell. Transp. Syst. 2020, 23, 1924–1935. [Google Scholar] [CrossRef]
- Xiao, S.; Han, Q.L.; Ge, X.; Zhang, Y. Secure distributed finite-time filtering for positive systems over sensor networks under deception attacks. IEEE Trans. Cybern. 2020, 50, 1220–1229. [Google Scholar] [CrossRef]
- Liu, J.L.; Yin, T.T.; Yue, D.; Karimi, H.R.; Cao, J.D. Event-based secure leader-following consensus control for multi-agent systems with multiple cyber-attacks. IEEE Trans. Cybern. 2020, 51, 162–173. [Google Scholar] [CrossRef]
- Persis, C.D.; Tesi, P. Input-to-state stabilizing control under denial-of-service. IEEE Trans. Autom. Control 2015, 60, 2930–2944. [Google Scholar] [CrossRef]
- Persis, C.D.; Tesi, P. Networked control of nonlinear systems under Denial-of-Service. Syst. Control Lett. 2016, 96, 124–131. [Google Scholar] [CrossRef] [Green Version]
- Hu, S.; Yue, D.; Han, Q.L.; Xie, X.; Chen, X.; Dou, C. Observer-based event-triggered control for networked linear systems subject to denial-of-service attacks. IEEE Trans. Cybern. 2020, 50, 1952–1964. [Google Scholar] [CrossRef] [PubMed]
- Zhao, N.; Shi, P.; Xing, W. Dynamic event-triggered approach for networked control systems under denial of service attacks. Int. J. Robust Nonlinear Control 2021, 31, 1774–1795. [Google Scholar] [CrossRef]
- Amini, A.; Asif, A.; Mohammadi, A. A Unified Optimization for Resilient Dynamic Event-Triggering Consensus Under Denial of Service. IEEE Trans. Cybern. 2020, 52, 2872–2884. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wang, D.; Su, L.; Park, J.H.; Shen, H. Dynamic Event-Triggered H∞ Load Frequency Control for Multi-Area Power Systems Subject to Hybrid Cyber Attacks. IEEE Trans. Syst. Man Cybern. Syst. 2022. [Google Scholar] [CrossRef]
- Dolk, V.S.; Tesi, P.; Persis, C.D.; Heemels, W.P.M.H. Event-Triggered Control Systems under Denial-of-Service Attacks. IEEE Trans. Control Netw. Syst. 2017, 4, 93–105. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Zhao, C.; Wang, C.; Chen, T. Dynamic Event-triggered Control for Nonlinear NCSs Subject to DoS Attacks. J. Frankl. Inst. 2022, 359, 5385–5411. [Google Scholar] [CrossRef]
- Ai, Z.; Peng, L.; Zong, G.; Shi, K. Impulsive Control for Nonlinear Systems Under DoS Attacks: A Dynamic Event-Triggered Method. IEEE Trans. Circuits Syst. II Exp. Briefs 2022, 69, 3839–3843. [Google Scholar] [CrossRef]
- Chen, X.; Chang, X. Resilient filter of nonlinear network systems with dynamic event-triggered mechanism and hybrid cyber attack. Appl. Math. Comput. 2022, 434, 127419. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 2003. [Google Scholar]
- Galias, Z. Continuation-Based Method to Find Periodic Windows in Bifurcation Diagrams With Applications to The Chua’s Circuit With A Cubic Nonlinearity. IEEE Trans. Circuits Syst. I Reg. Papers 2021, 68, 3784–3793. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, W.; Wang, H.; Hou, H.; Liu, X.; Zheng, M. Dynamically Triggering Resilient Control for Networked Nonlinear Systems under Malicious Aperiodic DoS Attacks. Processes 2022, 10, 2627. https://doi.org/10.3390/pr10122627
Tan W, Wang H, Hou H, Liu X, Zheng M. Dynamically Triggering Resilient Control for Networked Nonlinear Systems under Malicious Aperiodic DoS Attacks. Processes. 2022; 10(12):2627. https://doi.org/10.3390/pr10122627
Chicago/Turabian StyleTan, Wei, He Wang, Huazhou Hou, Xiaoxu Liu, and Meng Zheng. 2022. "Dynamically Triggering Resilient Control for Networked Nonlinear Systems under Malicious Aperiodic DoS Attacks" Processes 10, no. 12: 2627. https://doi.org/10.3390/pr10122627