

The Total Low Frequency Oscillation Damping Method Based on Interline Power Flow Controller through Robust Control

Abstract
:1. Introduction
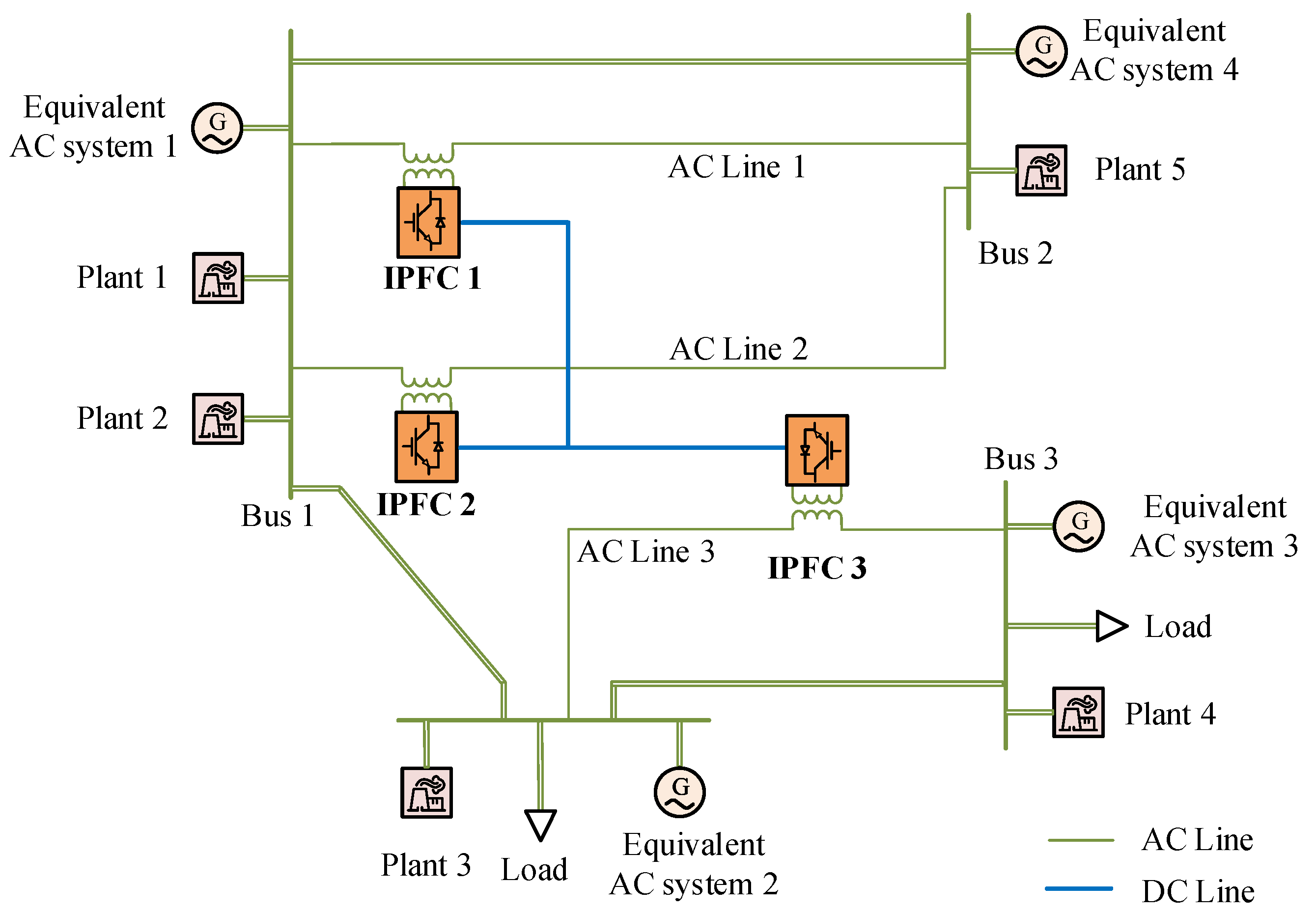
- The low-frequency oscillation damping controller is designed through IPFC devices, and it validates that IPFC can enhance the dynamic stability of the AC system effectively.
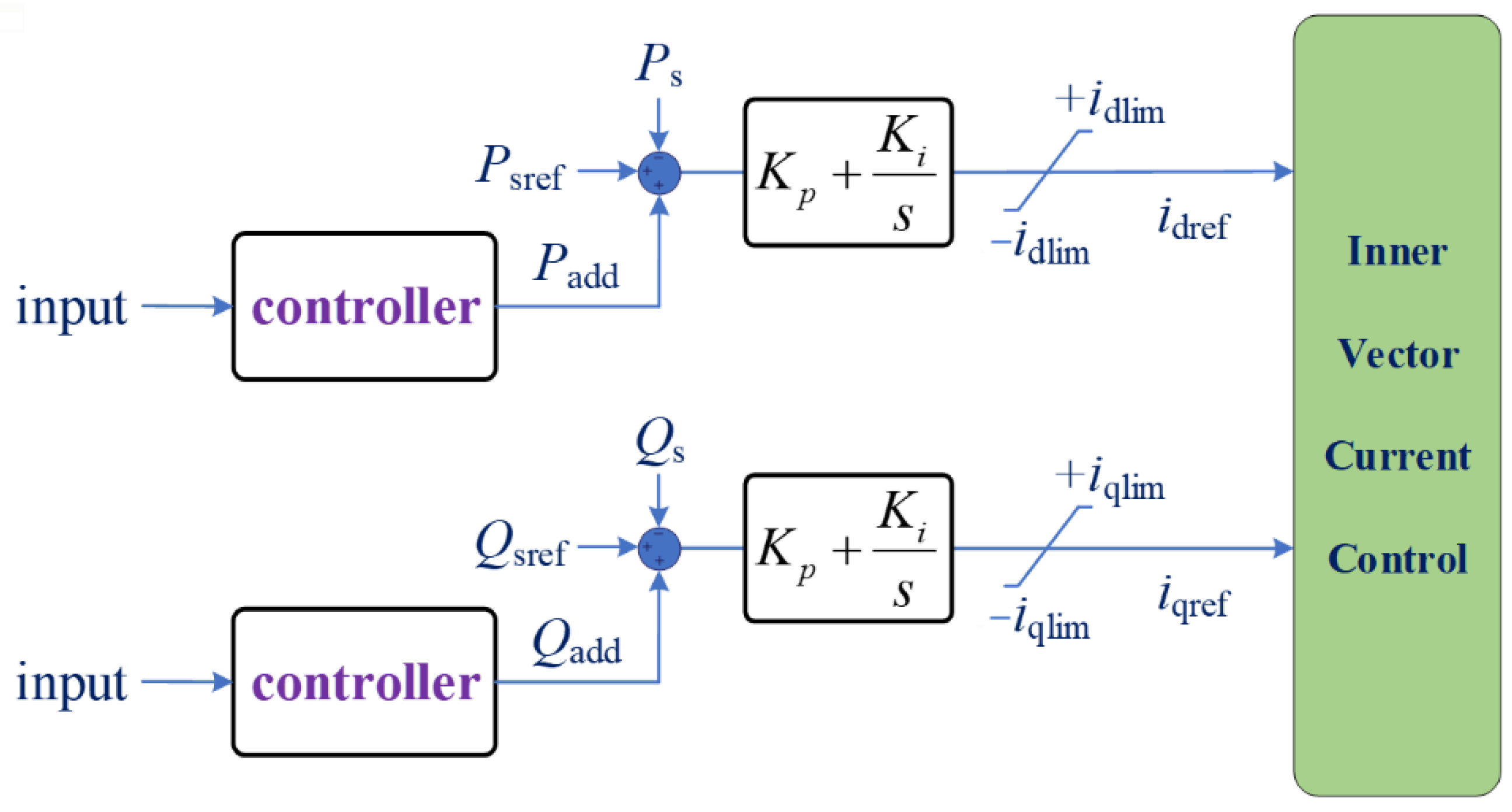
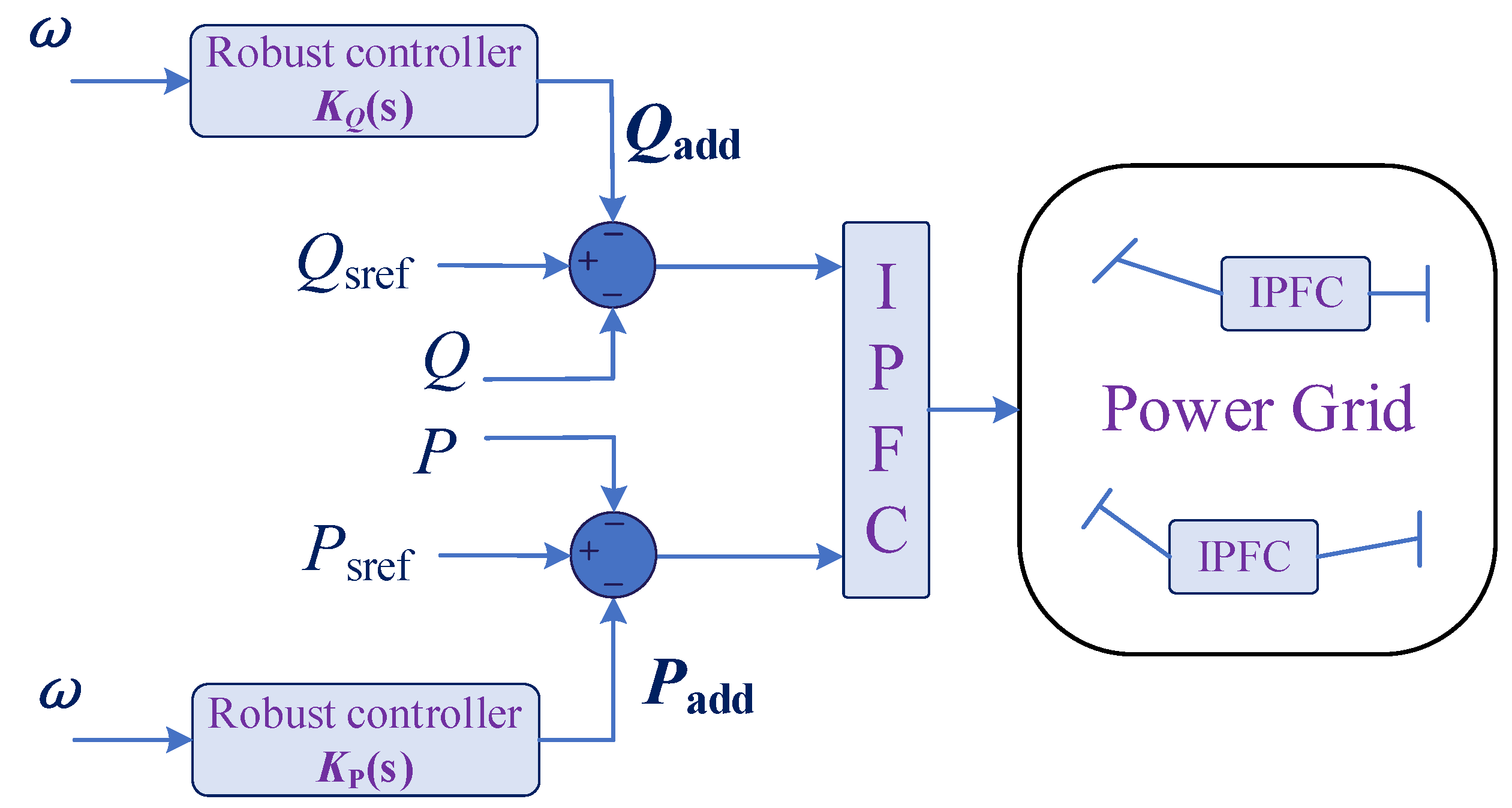
- The total controller is designed through both the active control and reactive control loop of the IPFC. A better control effect and be reached through such strategy, and the damping ability can be guaranteed by the other controller when one controller is in fault.
- The robust control theory is used when the damping controller is designed, which can make the control correct and effective on most occasions, even when the system operation mode changes.
2. The Interline Power Flow Controller
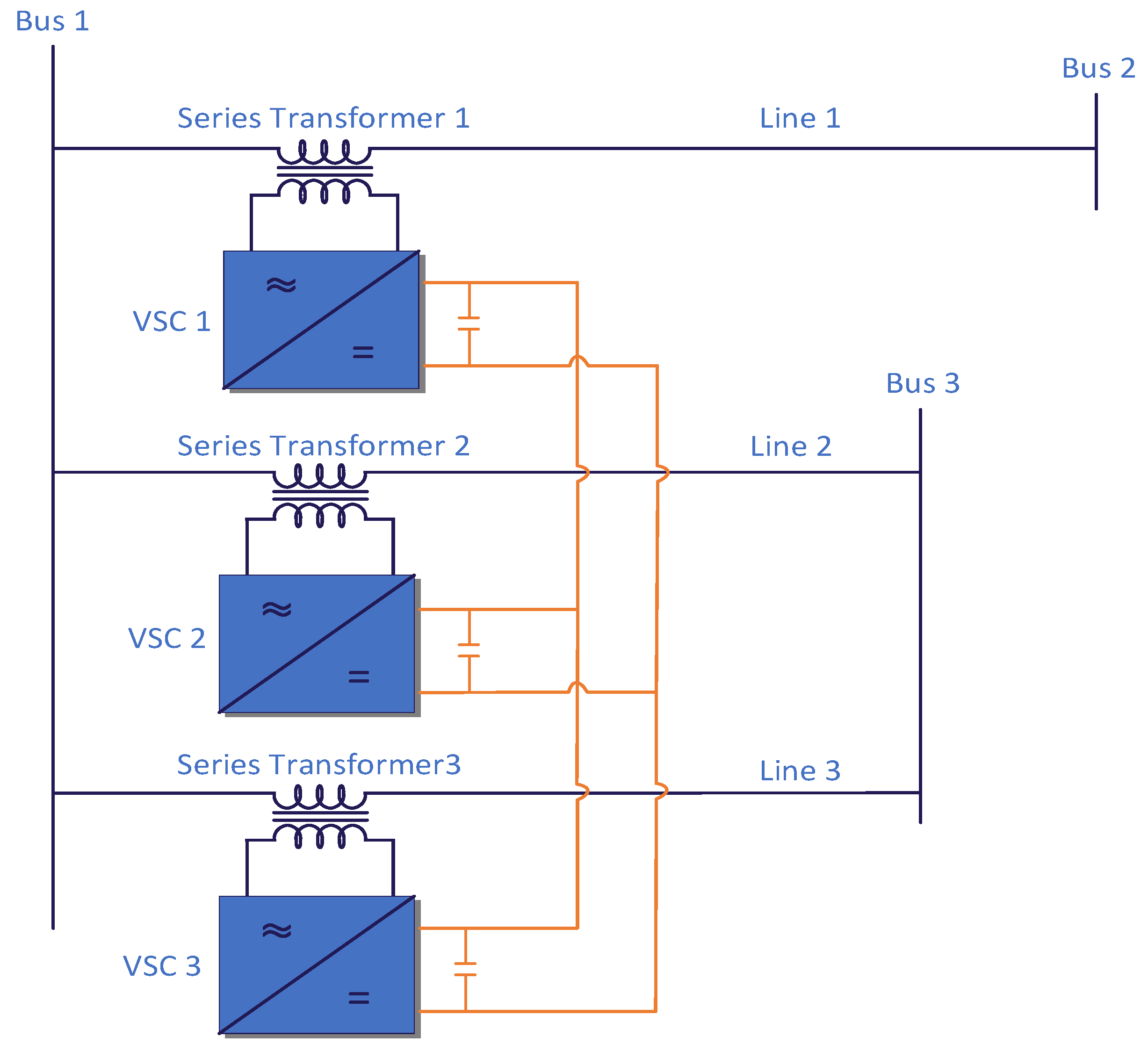
2.1. The Structure of IPFC
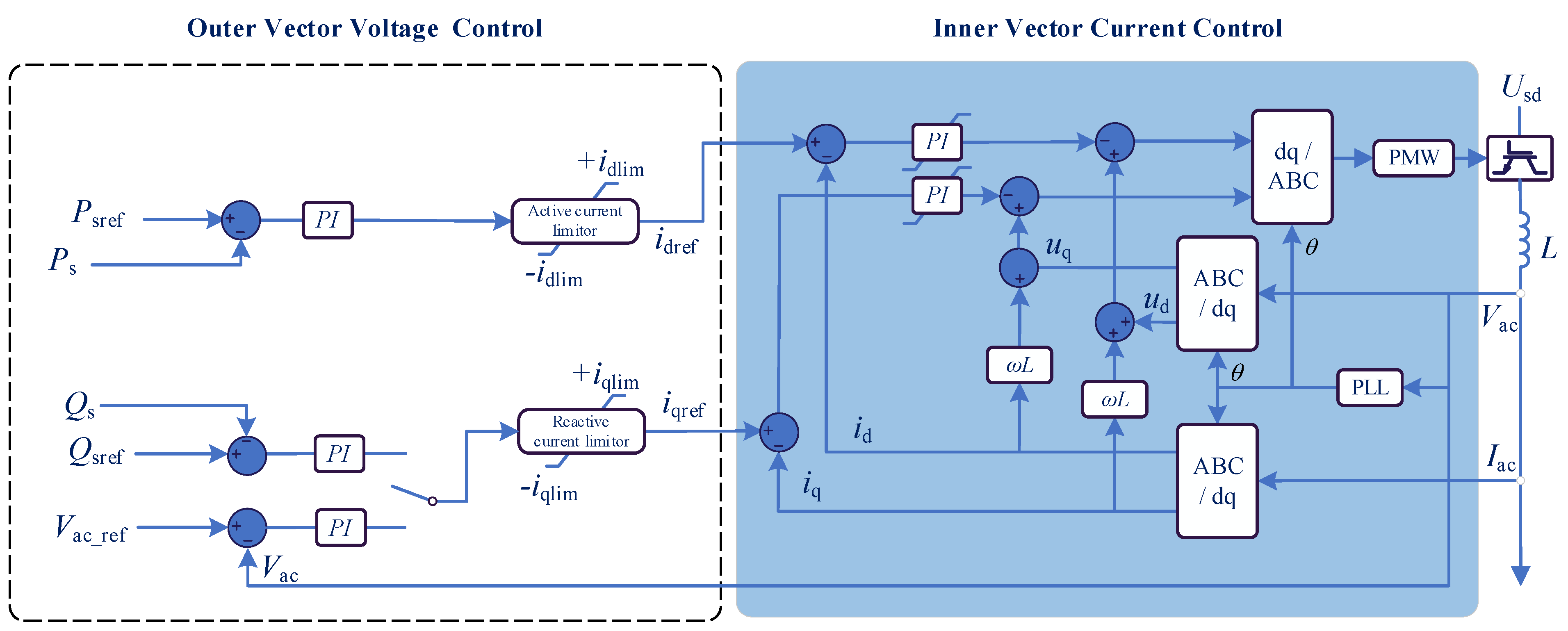
2.2. The Control Strategy of Mainly Controlled Converter
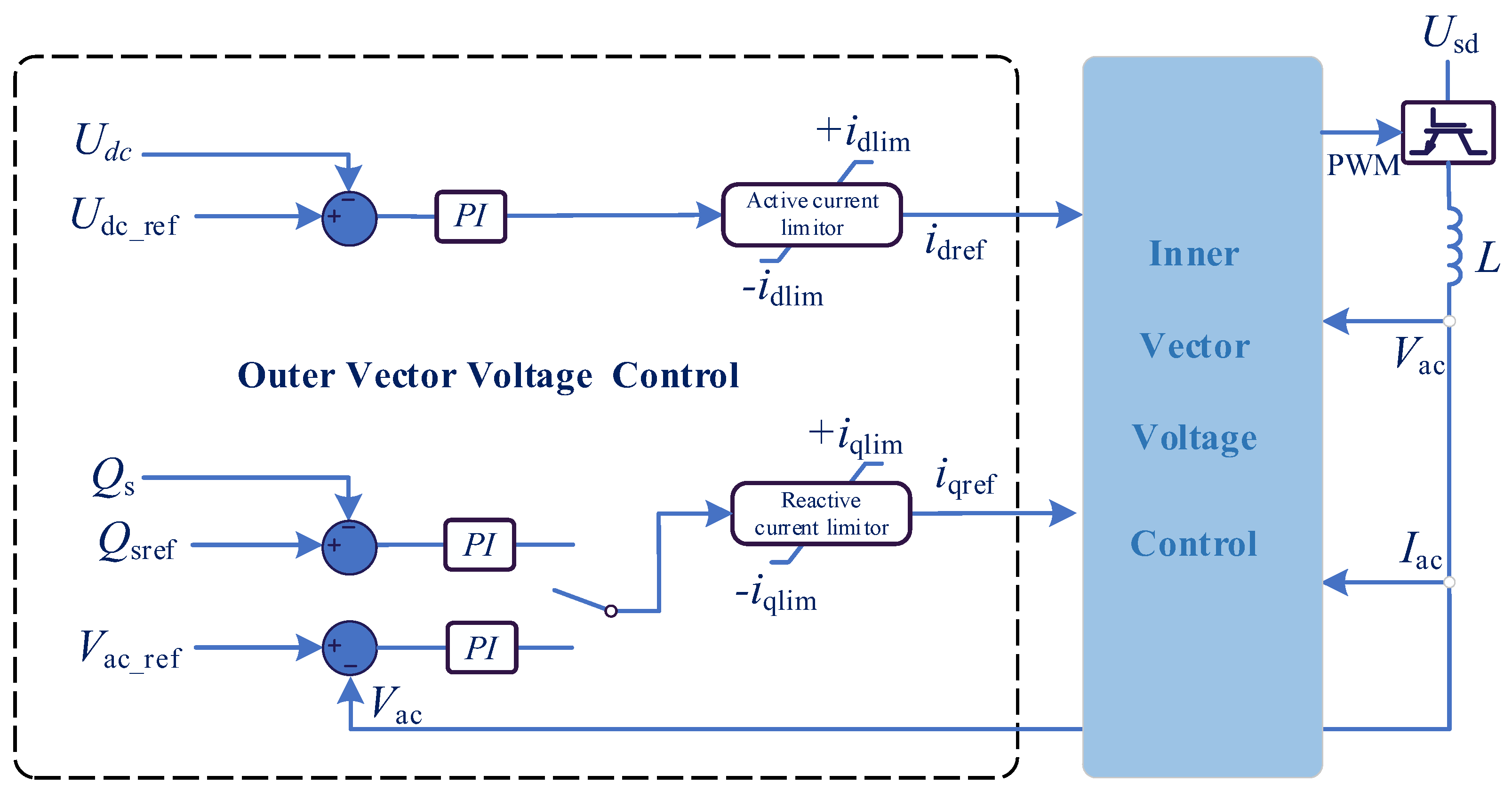
2.3. The Control Strategy of Auxiliary Controlled Converter
3. Total Low Frequency Oscillation Damping Method Based on System Identification
3.1. The Total Damping Strategy for IPFC
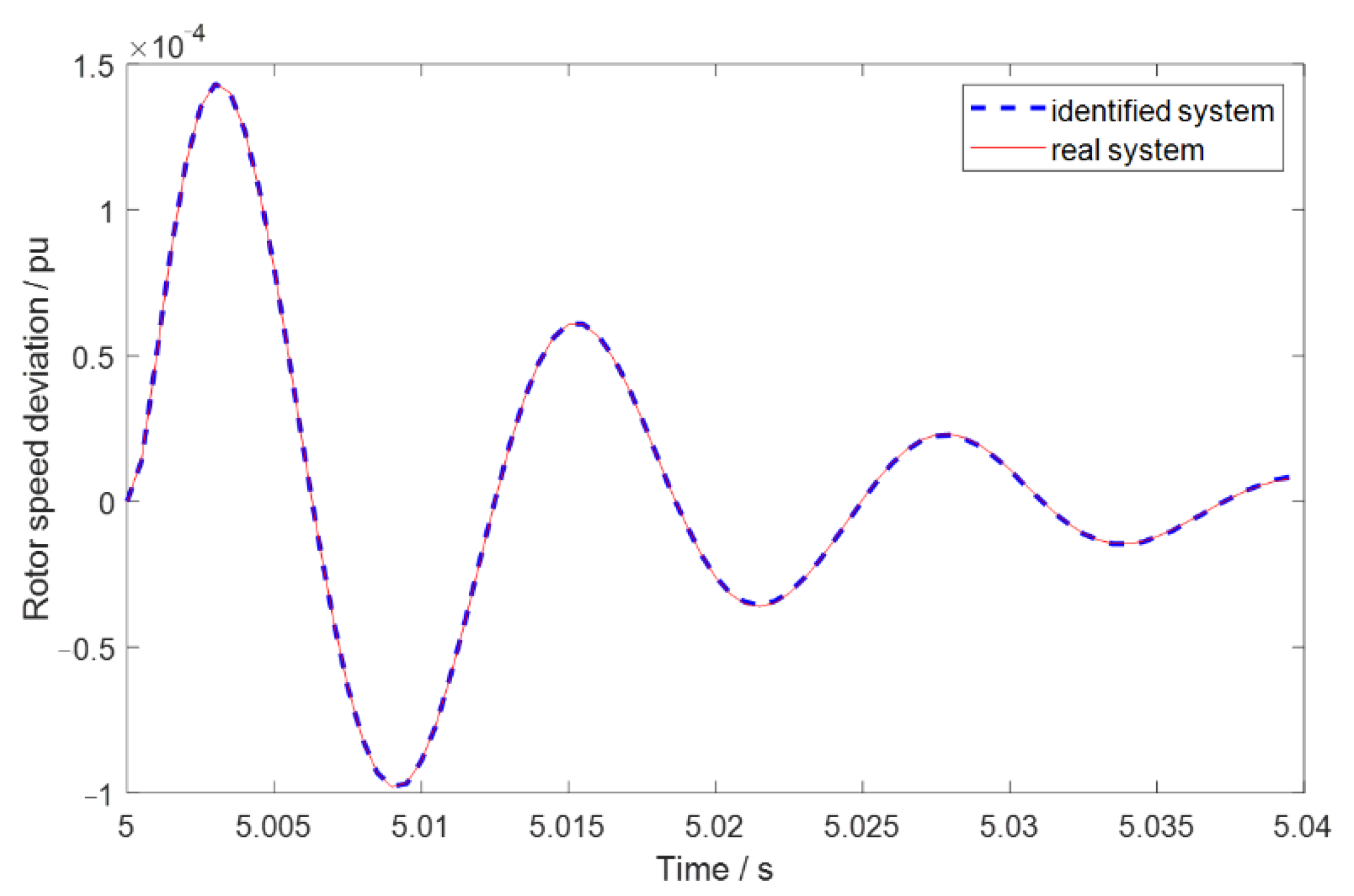
3.2. The System Modeling Method Based on PRONY Identification
3.3. The Robust Control LMI Method
4. Simulation Verifications
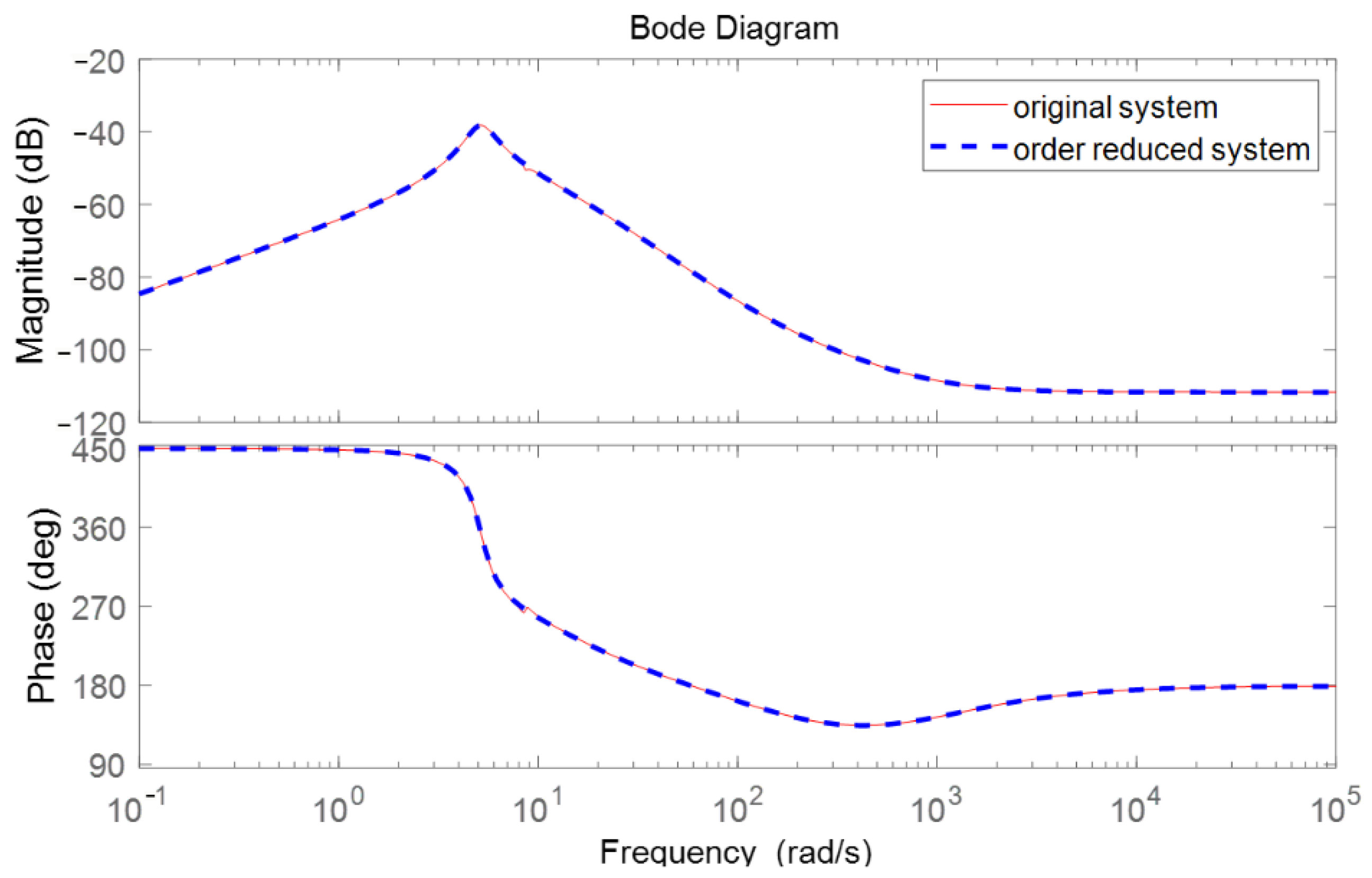
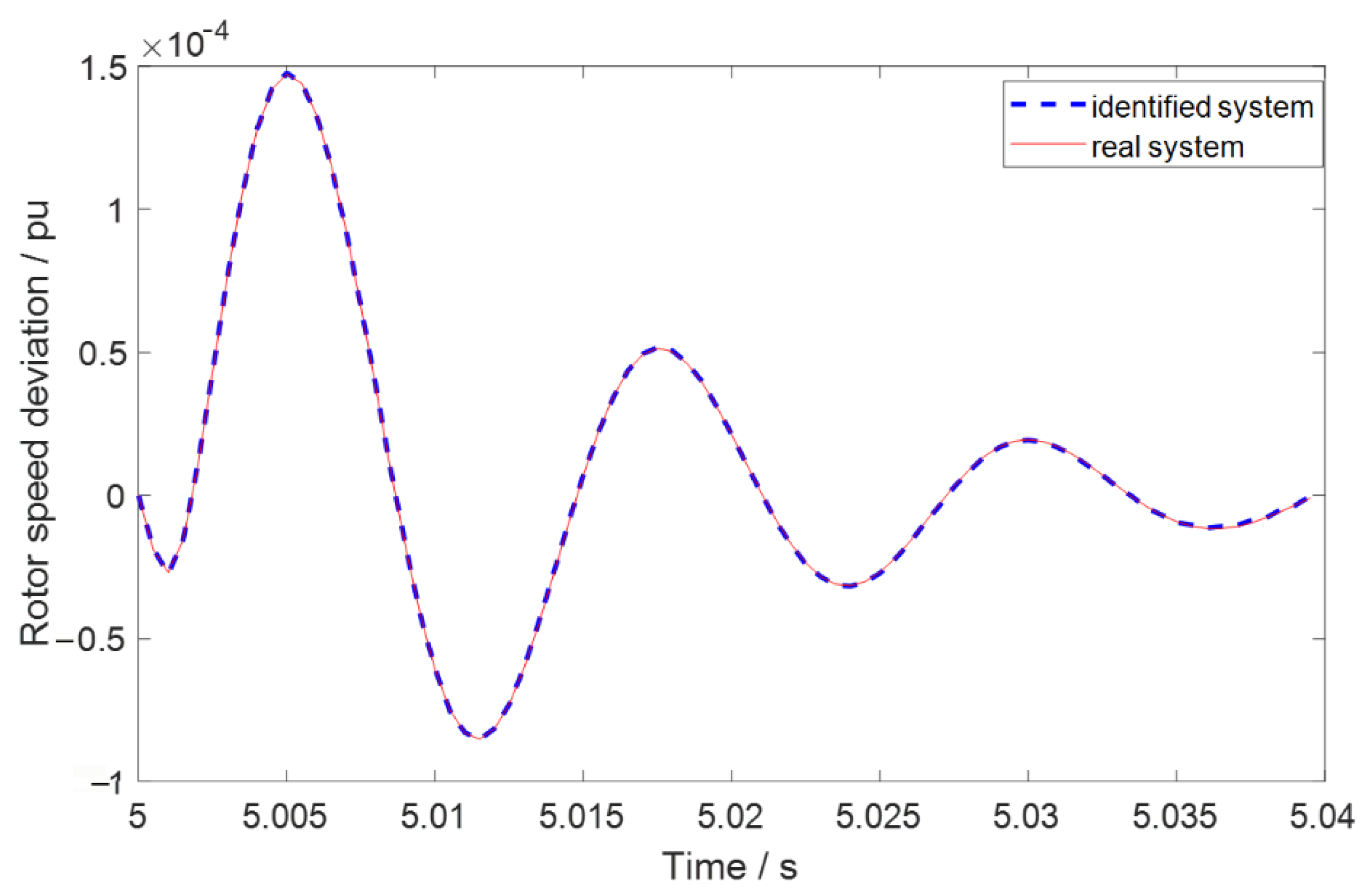
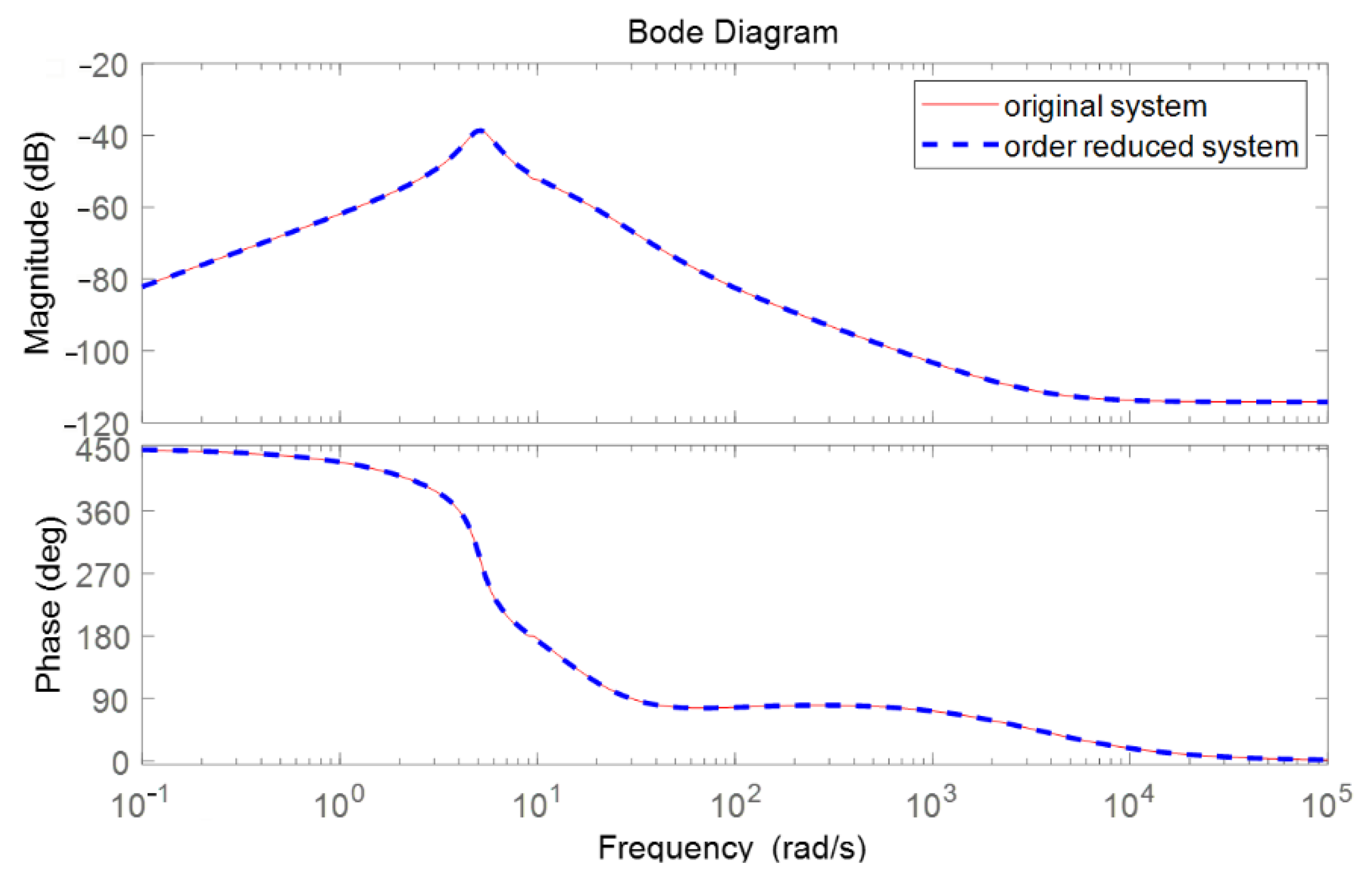
4.1. System Identification
4.2. Robust Controller Design
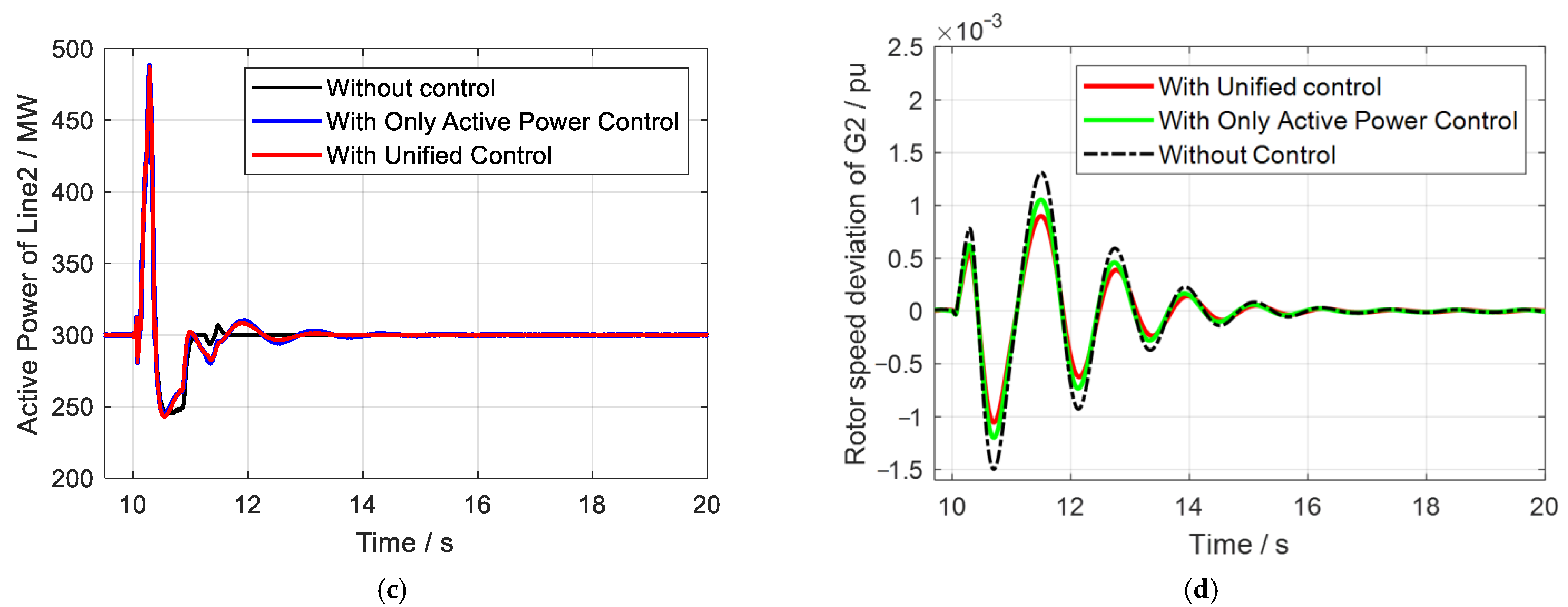
4.3. Case 1 Study: In Single Phase to Ground Fault Situation
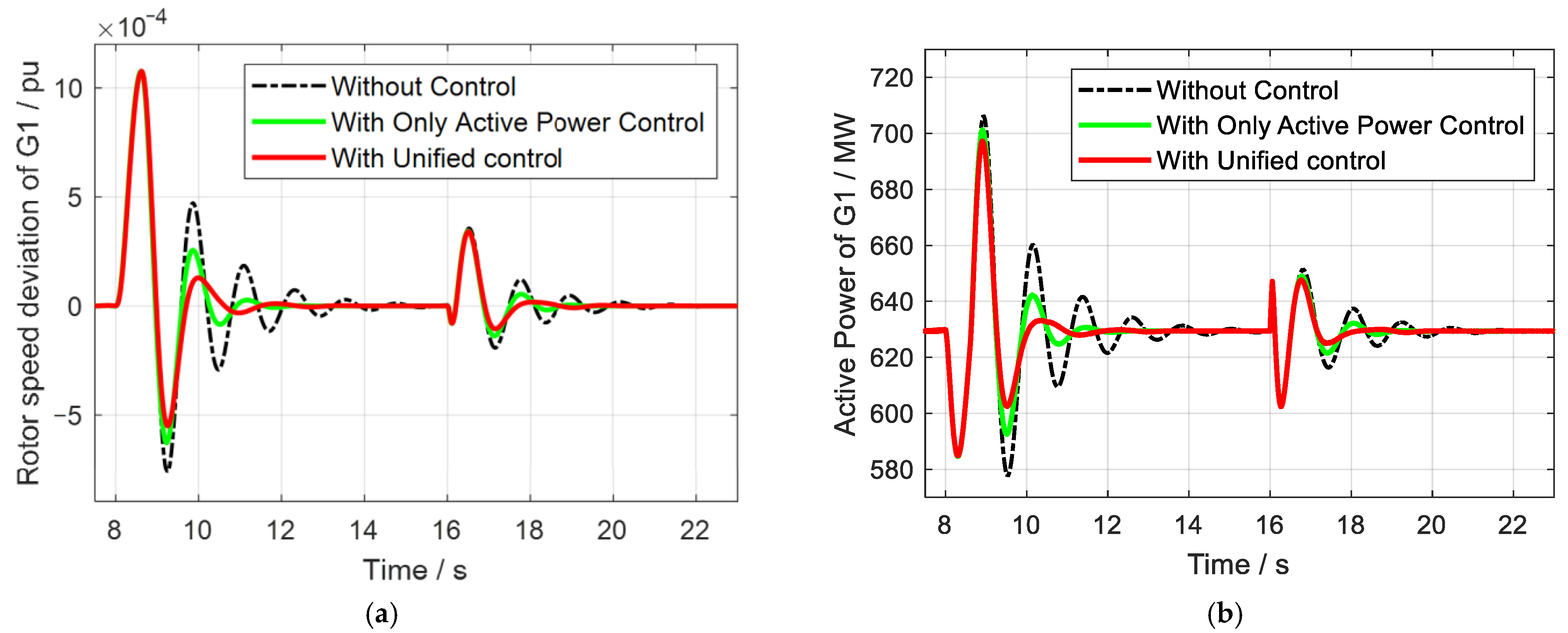
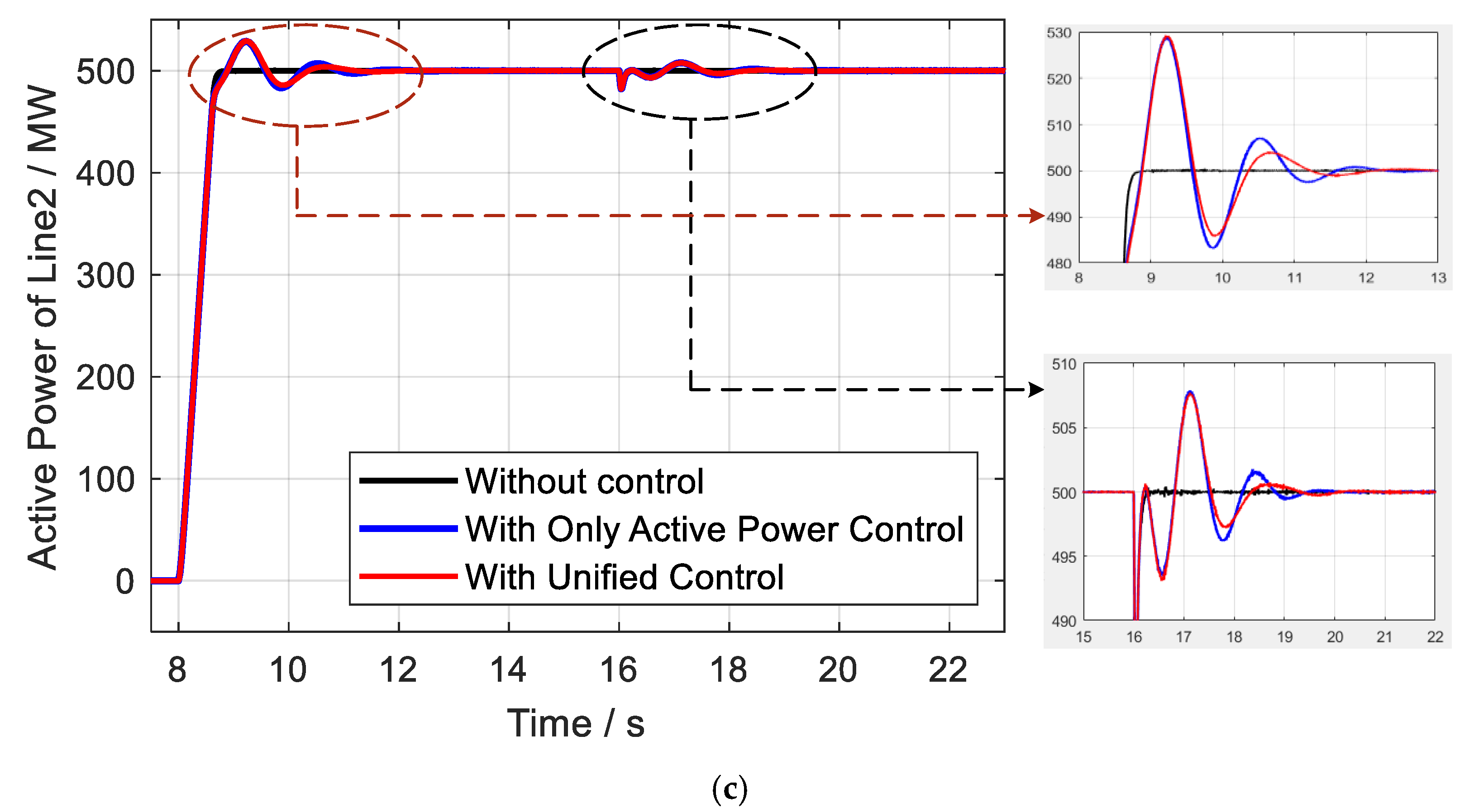
4.4. Case 2 Study: In Temporary Line Disconnection Fault Situation
4.5. Case 3 Study: In Cascading Failure Situation
5. Conclusions
- The IPFC can be used for LFO damping and can reach satisfying effect. Especially, the different active and reactive outer current control loops can be used for oscillation control. Furthermore, the control can still be effective even one controller is out of operation.
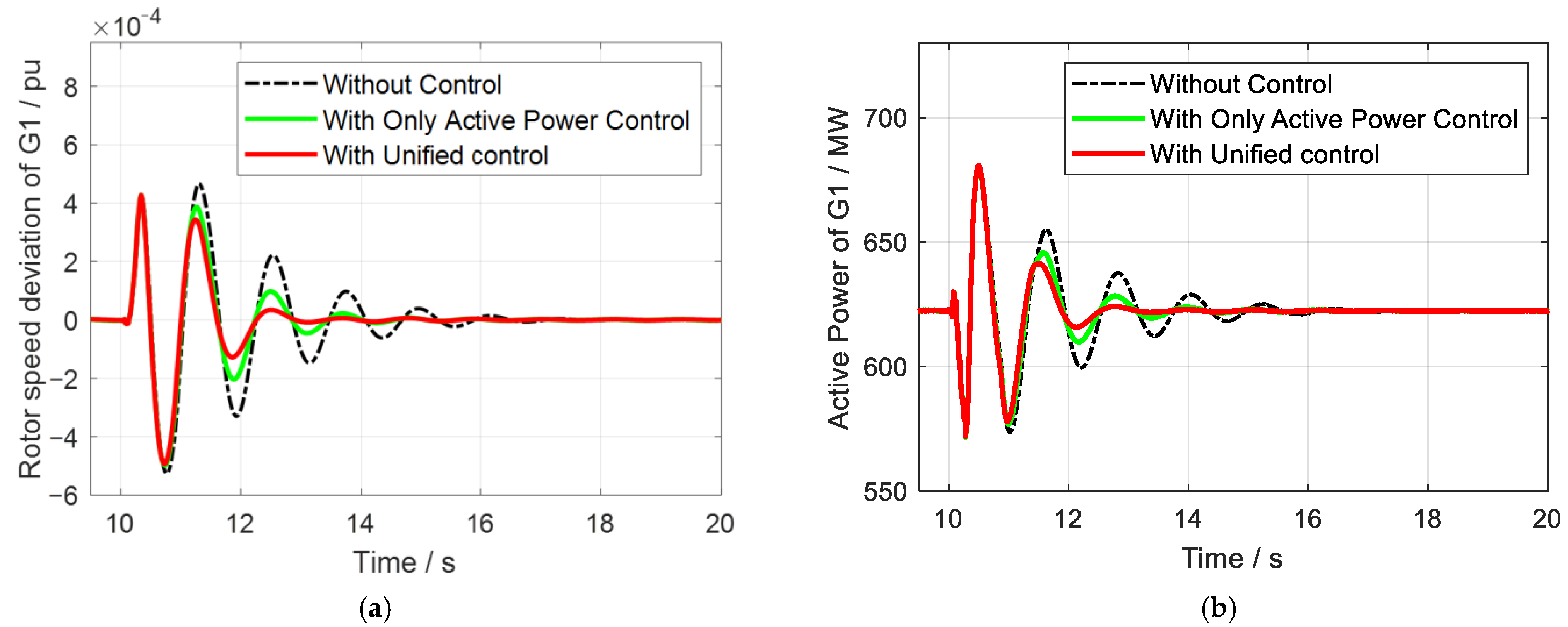
- Compared with only one active outer control loop situation, the total control scheme with a reactive controller has more advantages. With such a design, a better control effect can be obtained, and almost 50% ratio increment can be reached with unified control compared with only active power control.
- The robust controller design through LMI and PRONY method is effective to suppress the low-frequency oscillations. In addition, the LFO can both be quickly eliminated whether it is in fault, power disturbance, and operation vary occasions. Furthermore, the damping ratio of the controlled system can increase to 48%, 21%, and 41%, respectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, R.; Wong, P.; Wang, K.; Li, B.; Yuan, F. Power quality enhancement and engineering application with high permeability distributed photovoltaic access to low-voltage distribution networks in Australia. Prot. Control Mod. Power Syst. 2020, 5, 18. [Google Scholar] [CrossRef]
- Shang, L.; Guo, H.; Zhu, W. An improved MPPT control strategy based on incremental conductance algorithm. Prot. Control Mod. Power Syst. 2020, 5, 14. [Google Scholar] [CrossRef]
- Jiang, Q.; Zeng, X.; Li, B.; Wang, S.; Liu, T.; Chen, Z.; Wang, T.; Zhang, M. Time-Sharing Frequency Coordinated Control Strategy for PMSG-Based Wind Turbine. IEEE J. Emerg. Sel. Top. Circuits Syst. 2022, 12, 268–278. [Google Scholar] [CrossRef]
- Liu, Y.; Meliopoulos, A.P.; Sun, L.; Choi, S. Protection and control of microgrids using dynamic state estimation. Prot. Control Mod. Power Syst. 2018, 3, 31. [Google Scholar] [CrossRef] [Green Version]
- Tao, Y.; Li, B.; Dragicevic, T.; Liu, T.; Blaabjerg, F. HVDC Grid Fault Current Limiting Method Through Topology Optimization Based on Genetic Algorithm. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 7045–7055. [Google Scholar] [CrossRef]
- Tao, Y.; Li, B.; Liu, T. Pole-to-ground fault current estimation in symmetrical monopole high-voltage direct current grid considering modular multilevel converter control. Electron. Lett. 2020, 56, 392–395. [Google Scholar] [CrossRef]
- Jiang, Q.; Li, B.; Liu, T.; Wang, P. Fault current limiting method based on virtual impedance for hybrid high-voltage direct current with cascaded MMC inverters. Electron. Lett. 2021, 57, 229–231. [Google Scholar] [CrossRef]
- Gandoman, F.H.; Ahmadi, A.; Sharaf, A.M.; Siano, P.; Pou, J.; Hredzak, B.; Agelidis, V.G. Review of FACTS technologies and applications for power quality in smart grids with renewable energy systems. Renew. Sustain. Energy Rev. 2018, 82, 502–514. [Google Scholar] [CrossRef]
- Singh, B.; Kumar, R. A comprehensive survey on enhancement of system performances by using different types of FACTS con-trollers in power systems with static and realistic load models. Energy Rep. 2020, 6, 55–79. [Google Scholar] [CrossRef]
- Taher, M.A.; Kamel, S.; Jurado, F.; Ebeed, M. Optimal power flow solution incorporating a simplified UPFC model using lightning attachment procedure optimization. Int. Trans. Electr. Energy Syst. 2020, 30, e12170. [Google Scholar] [CrossRef]
- Lei, Y.; Li, T.; Tang, Q.; Wang, Y.; Yuan, C.; Yang, X.; Liu, Y. Comparison of UPFC, SVC and STATCOM in Improving Commutation Failure Immunity of LCC-HVDC Systems. IEEE Access 2020, 8, 135298–135307. [Google Scholar] [CrossRef]
- Wahhade, S.N.; Gowder, C. Enhancement of power flow capability in power system using UPFC-a review. Int. Res. J. Eng. Technol. 2019, 6, 1146–1150. [Google Scholar]
- Singh, P.; Senroy, N. Steady-state model of VSC based FACTS devices using flexible holomorphic embedding: (SSSC and IPFC). Int. J. Electr. Power Energy Syst. 2021, 133, 107256. [Google Scholar] [CrossRef]
- Kalyan, C.H.; Rao, G.S. Impact of communication time delays on combined LFC and AVR of a multi-area hybrid system with IPFC-RFBs coordinated control strategy. Prot. Control Mod. Power Syst. 2021, 6, 7. [Google Scholar] [CrossRef]
- Jiang, Q.; Li, B.; Liu, T. Investigation of hydro-governor parameters’ impact on ULFO. IET Renew. Power Gener. 2019, 13, 3133–3141. [Google Scholar] [CrossRef]
- Wang, P.; Li, B.; Jiang, Q.; Chen, G.; Han, X.; Dragicevic, T.; Liu, T. The occurrence mechanism and damping method of ultra-low-frequency oscillations. IET Renew. Power Gener. 2021, 15, 1100–1115. [Google Scholar] [CrossRef]
- Jiang, S.; Gole, A.M.; Annakkage, U.D.; Jacobson, D.A. Damping Performance Analysis of IPFC and UPFC Controllers Using Validated Small-Signal Models. IEEE Trans. Power Deliv. 2010, 26, 446–454. [Google Scholar] [CrossRef]
- Mishra, S.; Dash, P.; Hota, P.; Tripathy, M. Genetically optimized neuro-fuzzy IPFC for damping modal oscillations of power system. IEEE Trans. Power Syst. 2002, 17, 1140–1147. [Google Scholar] [CrossRef]
- Parimi, A.M.; Elamvazuthi, I.; Kumar, A.V.P.; Cherian, V. Fuzzy logic based control for IPFC for damping low frequency oscillations in multimachine power system. In Proceedings of the 2015 IEEE IAS Joint Industrial and Commercial Power Systems/Petroleum and Chemical Industry Conference (ICPSPCIC), Hyderabad, India, 19–21 November 2015; pp. 32–36. [Google Scholar] [CrossRef]
- Almunif, A.; Fan, L.; Miao, Z. A tutorial on data-driven eigenvalue identification: Prony analysis, matrix pencil, and eigensystem realization algorithm. Int. Trans. Electr. Energy Syst. 2020, 30, e12283. [Google Scholar] [CrossRef] [Green Version]
- Isbeih, Y.J.; El Moursi, M.S.; Xiao, W.; El-Saadany, E. H∞ mixed-sensitivity robust control design for damping low-frequency oscillations with DFIG wind power generation. IET Gener. Transm. Distrib. 2019, 13, 4274–4286. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control Strategy | IPFC1 | IPFC2 | IPFC3 |
|---|---|---|---|
| Control Functions | mainly controlled converter | mainly controlled converter | auxiliary controlled converter |
| Active power control mode | Constant active power control | Constant active power control | Constant DC voltage control |
| Reactive power control mode | Constant reactive power control | Constant reactive power control | Constant reactive power control |
| IPFC1 | IPFC2 | |
|---|---|---|
| AC system | Rated AC voltage/kV | 380 |
| IPFC Converter | Rated DC voltage/kV | 400 |
| HBSM number | 180 | |
| HBSM Capacitance/mF | 15 | |
| Arm reactance/mH | 50 | |
| idlim of MMC1/p.u. | 1.0 | |
| iqlim of MMC1/p.u. | 0.4 | |
| idlim of MMC2/p.u. | 1.0 | |
| iqlim of MMC2/p.u. | 0.4 | |
| idlim of MMC3/p.u. | 1.0 | |
| iqlim of MMC3/p.u. | 1.0 | |
| Line Parameter | Resistance/ohm/m | 0.1782 × 10–4 |
| Inductive Reactance/ohm/m | 0.3139 × 10–3 | |
| Capacitive Reactance/Mohm*m | 273.5448 | |
| Line 1/km | 150 | |
| Line 2/km | 150 | |
| Line 3/km | 150 |
| Control Strategy | Primary Frequency/Hz | Damping Ratio |
|---|---|---|
| Without control | 0.81 | 12% |
| With only active power control | 0.79 | 24% |
| With unified power control | 1.15 | 48% |
| Control Strategy | Primary Frequency/Hz | Damping Ratio |
|---|---|---|
| Without control | 0.81 | 12% |
| With only active power control | 0.80 | 16% |
| With unified power control | 0.79 | 21% |
| Control Strategy | Primary Frequency/Hz | Damping Ratio |
|---|---|---|
| Without control | 0.83 | 12% |
| With only active power control | 0.67 | 36% |
| With unified power control | 0.59 | 41% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Xu, K.; Li, Z.; Wu, S.; Wang, D. The Total Low Frequency Oscillation Damping Method Based on Interline Power Flow Controller through Robust Control. Processes 2022, 10, 2064. https://doi.org/10.3390/pr10102064
Zhao J, Xu K, Li Z, Wu S, Wang D. The Total Low Frequency Oscillation Damping Method Based on Interline Power Flow Controller through Robust Control. Processes. 2022; 10(10):2064. https://doi.org/10.3390/pr10102064
Chicago/Turabian StyleZhao, Jingbo, Ke Xu, Zheng Li, Shengjun Wu, and Dajiang Wang. 2022. "The Total Low Frequency Oscillation Damping Method Based on Interline Power Flow Controller through Robust Control" Processes 10, no. 10: 2064. https://doi.org/10.3390/pr10102064