
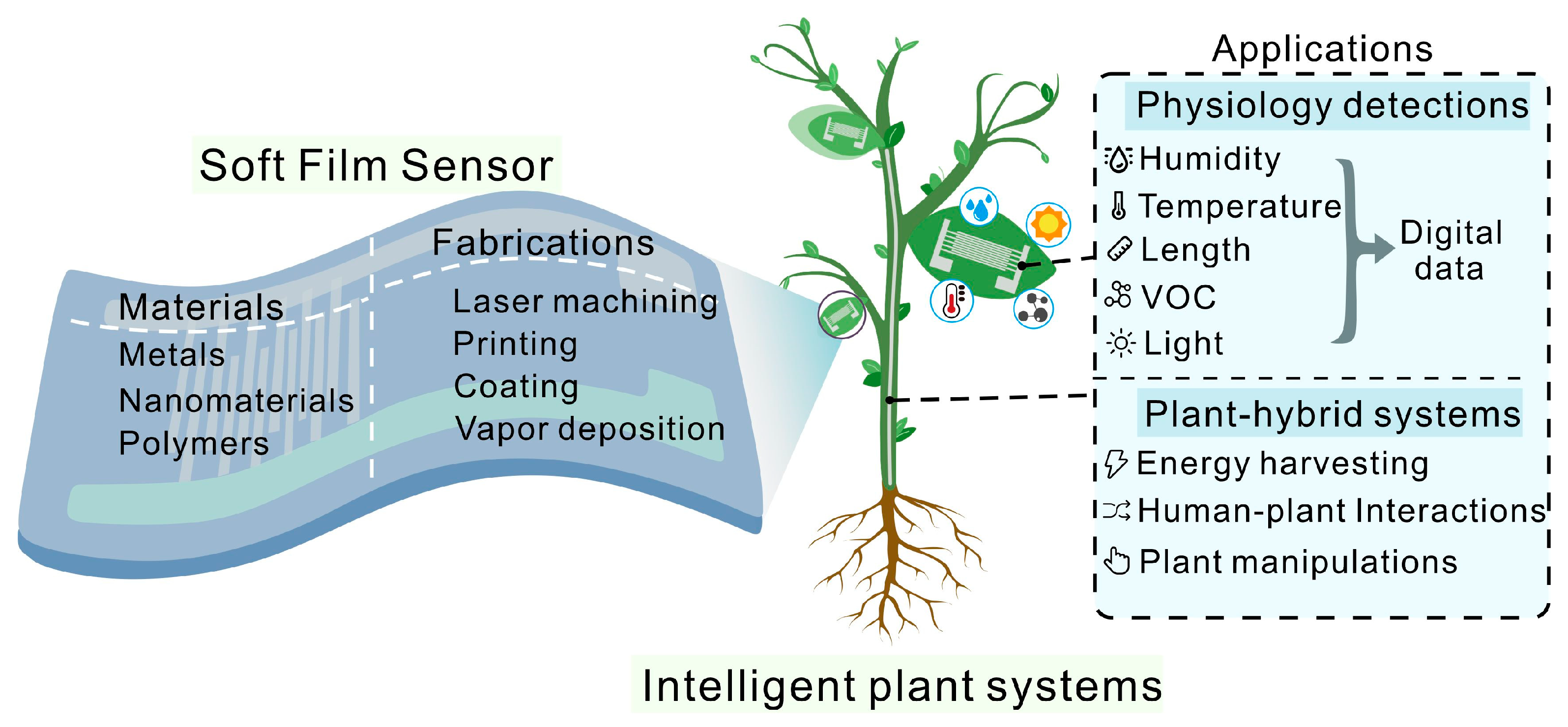
Micro/Nano Soft Film Sensors for Intelligent Plant Systems: Materials, Fabrications, and Applications

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
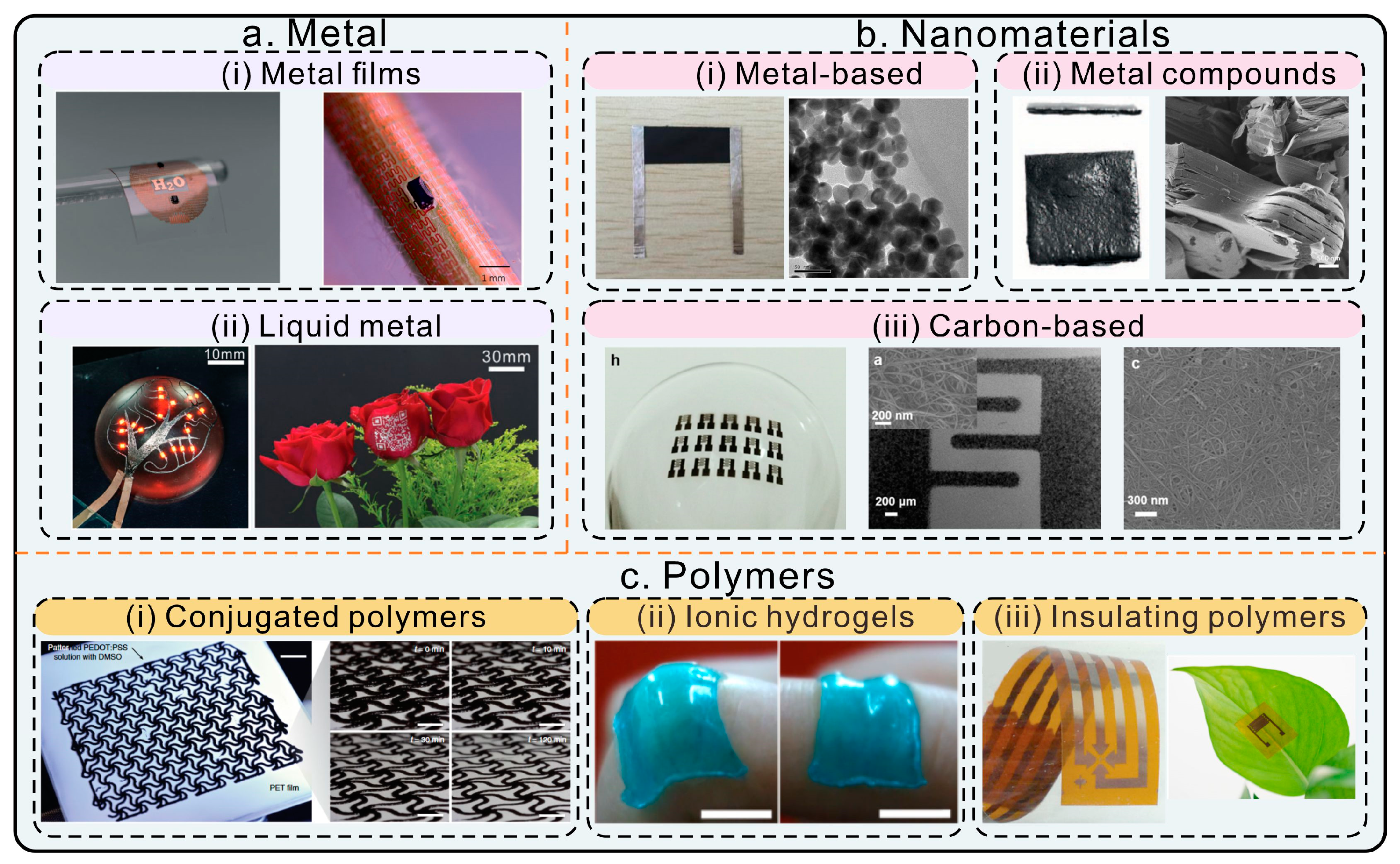
2. Materials
2.1. Metals
2.1.1. Metal Films
2.1.2. Liquid Metal
2.2. Nanomaterials
2.2.1. Carbon Particles, Carbon Nanotubes, Graphene-Based Materials, and Graphite
2.2.2. Metal-Based Nanomaterials
2.2.3. Metal Oxide, Metal Carbides and Nitrides (MXenes), and Other Metal Compounds
2.3. Polymers
2.3.1. Conjugated Polymers
2.3.2. Ionically Conductive Hydrogels
2.3.3. Insulating Polymers as Substrates
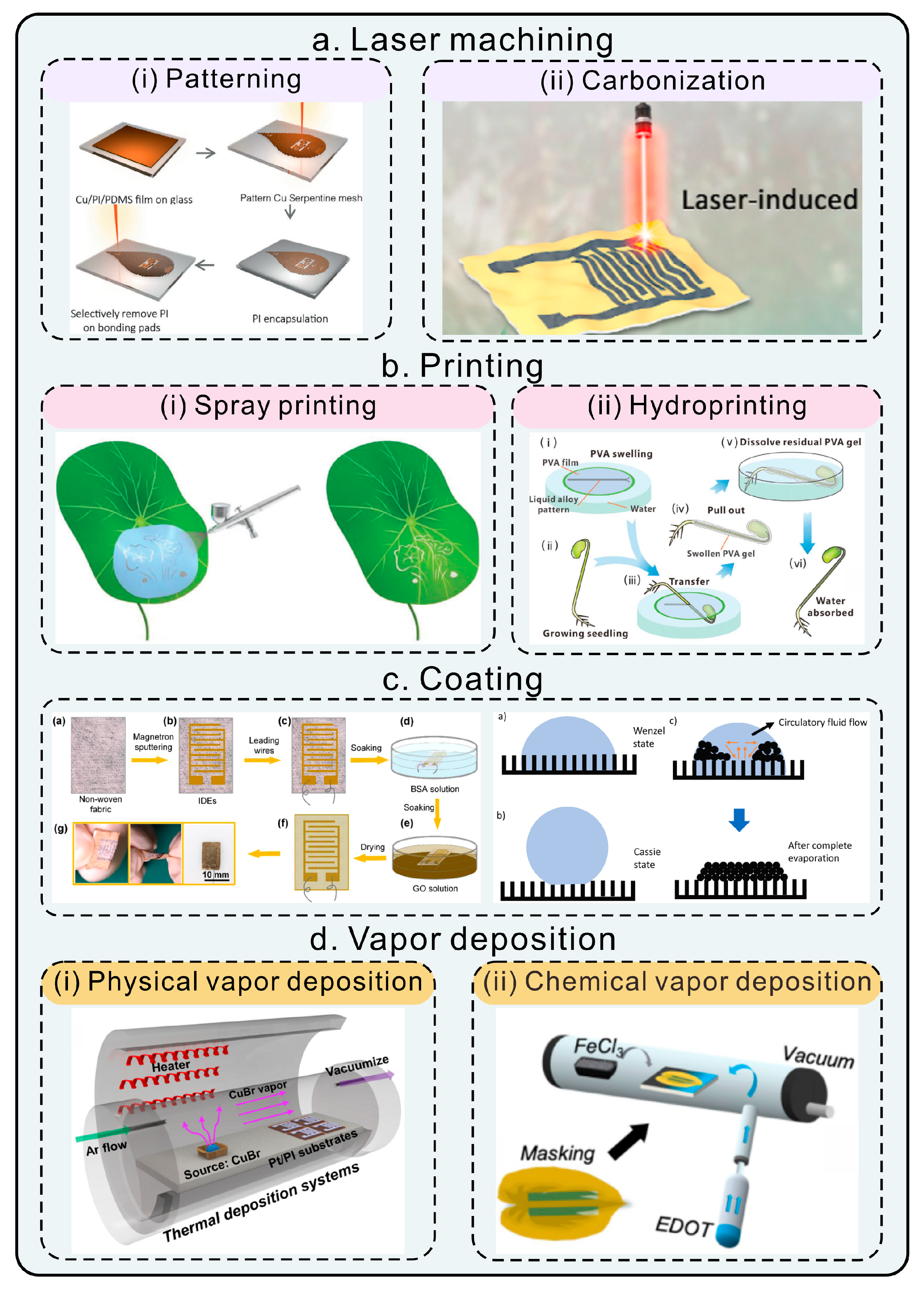
3. Fabrication
3.1. Laser Machining
3.1.1. Patterning
3.1.2. Carbonization
3.2. Printing
3.2.1. Spray Printing
3.2.2. Hydroprinting
3.3. Coating
3.4. Vapor Deposition
3.4.1. Physical Vapor Deposition
3.4.2. Chemical Vapor Deposition
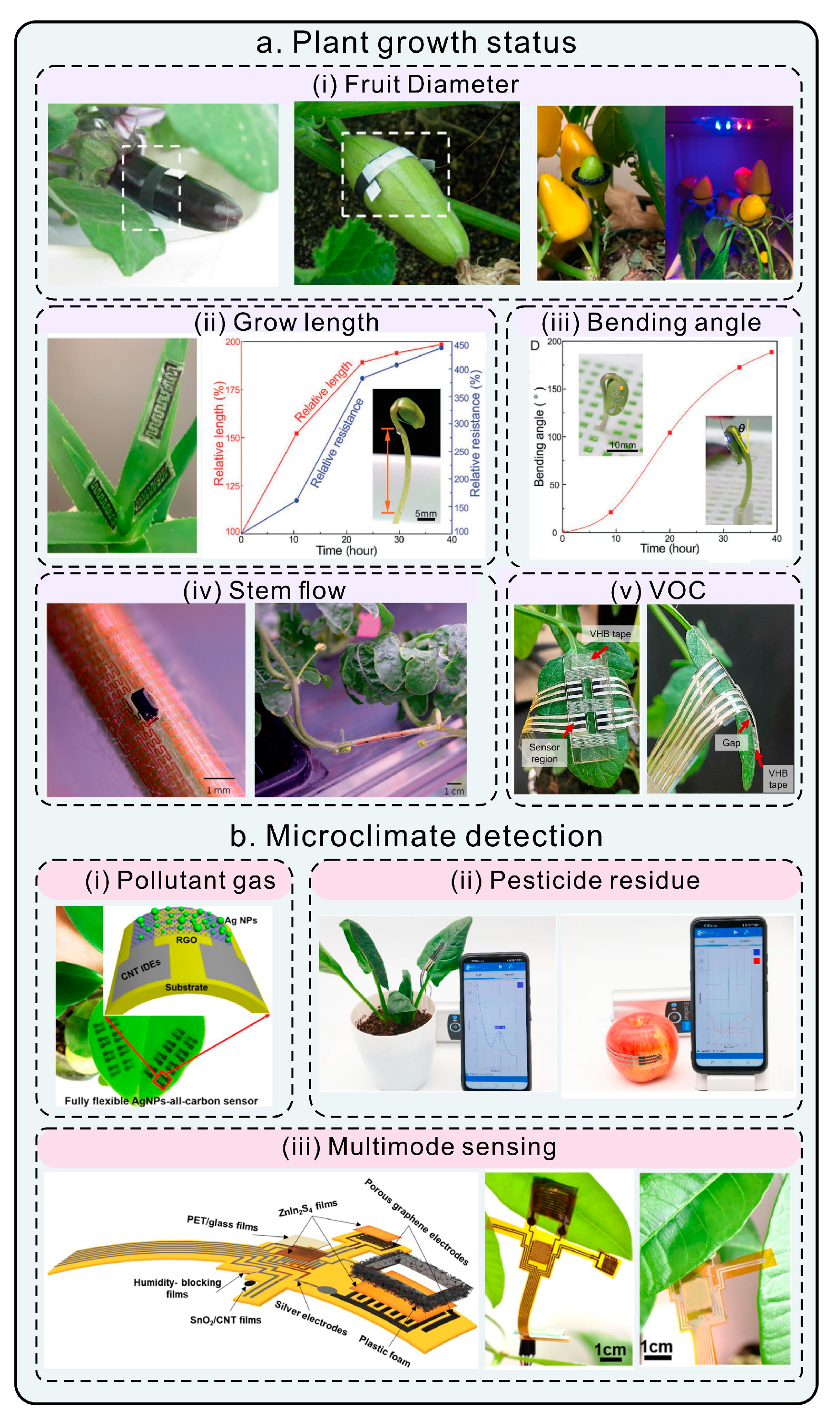
4. Applications
4.1. Physiological Detection
4.1.1. Plant Growth Status
4.1.2. Microclimate Perception
4.2. Intelligent Plant-Hybrid System
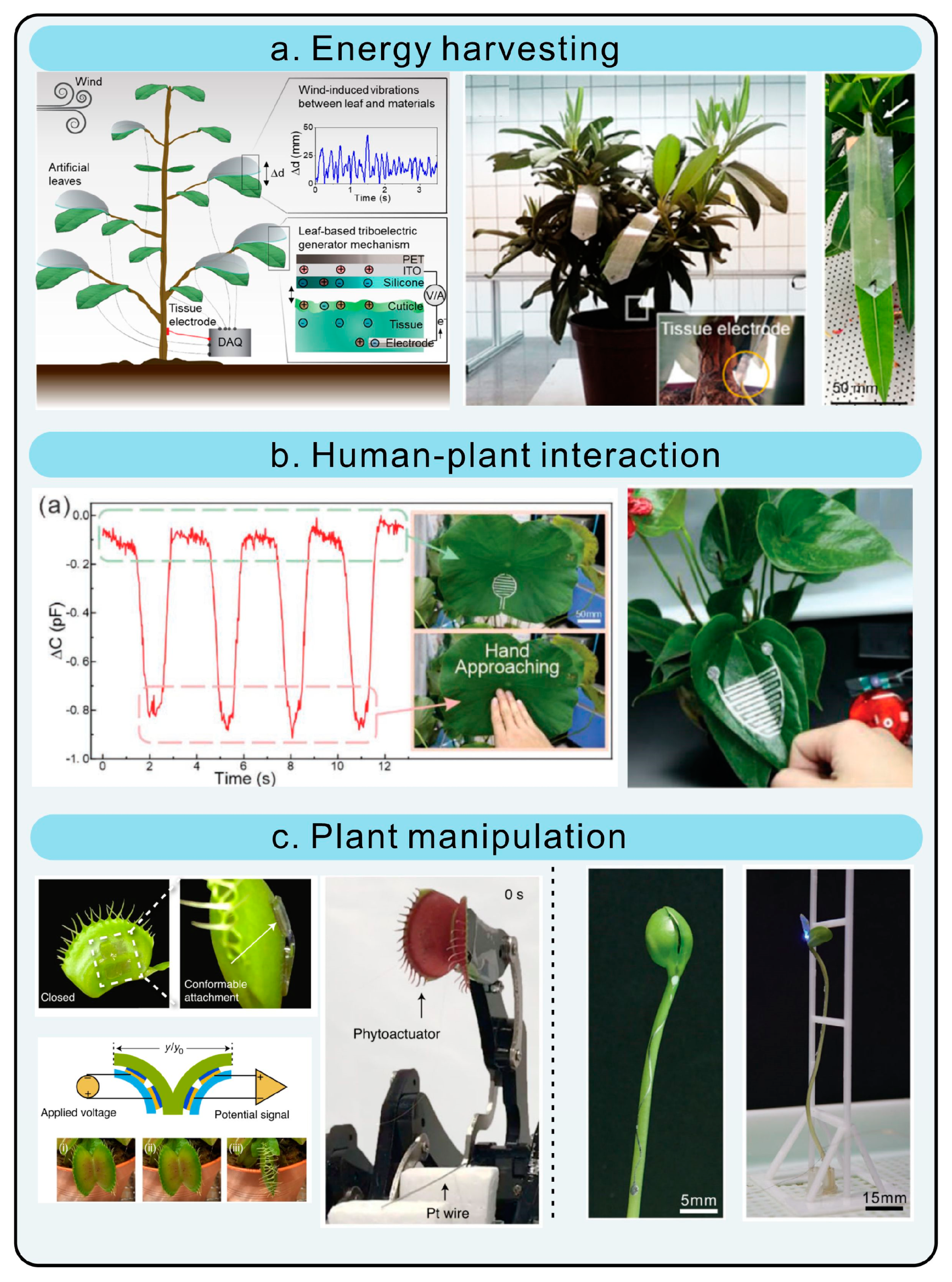
4.2.1. Energy Harvesting
4.2.2. Human–Plant Interaction
4.2.3. Plant Manipulation
5. Conclusions and Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gougoulias, C.; Clark, J.M.; Shaw, L.J. The Role of Soil Microbes in the Global Carbon Cycle: Tracking the below-Ground Microbial Processing of Plant-Derived Carbon for Manipulating Carbon Dynamics in Agricultural Systems. J. Sci. Food Agric. 2014, 94, 2362–2371. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Laforest-Lapointe, I.; Paquette, A.; Messier, C.; Kembel, S.W. Leaf Bacterial Diversity Mediates Plant Diversity and Ecosystem Function Relationships. Nature 2017, 546, 145–147. [Google Scholar] [CrossRef] [PubMed]
- Juroszek, P.; Von Tiedemann, A. Potential Strategies and Future Requirements for Plant Disease Management under a Changing Climate. Plant Pathol. 2011, 60, 100–112. [Google Scholar] [CrossRef]
- Trewavas, A. Plant Intelligence: Mindless Mastery. Nature 2002, 415, 841. [Google Scholar] [CrossRef] [PubMed]
- Trewavas, T. Plant Intelligence: An Overview. Bioscience 2016, 66, 542–551. [Google Scholar] [CrossRef] [Green Version]
- Trewavas, A. Plant Intelligence. Naturwissenschaften 2005, 92, 401–413. [Google Scholar] [CrossRef] [PubMed]
- Christie, J.M.; Murphy, A.S. Shoot Phototropism in Higher Plants: New Light through Old Concepts. Am. J. Bot. 2013, 100, 35–46. [Google Scholar] [CrossRef]
- Hodge, A.; Berta, G.; Doussan, C.; Merchan, F.; Crespi, M. Plant Root Growth, Architecture and Function. Plant Soil 2009, 321, 153–187. [Google Scholar] [CrossRef]
- Huynh, T.P.; Haick, H. Learning from an Intelligent Mechanosensing System of Plants. Adv. Mater. Technol. 2019, 4, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Meder, F.; Baytekin, B.; Del Dottore, E.; Meroz, Y.; Tauber, F.; Walker, I.; Mazzolai, B. A Perspective on Plant Robotics: From Bioinspiration to Hybrid Systems. Bioinspir. Biomim. 2022, 18, 015006. [Google Scholar] [CrossRef]
- Hölker, F.; Wolter, C.; Perkin, E.K.; Tockner, K. Light Pollution as a Biodiversity Threat. Trends Ecol. Evol. 2010, 25, 681–682. [Google Scholar] [CrossRef] [PubMed]
- Qu, C.C.; Sun, X.Y.; Sun, W.X.; Cao, L.X.; Wang, X.Q.; He, Z.Z. Flexible Wearables for Plants. Small 2021, 17, 1–25. [Google Scholar] [CrossRef] [PubMed]
- Dufil, G.; Bernacka-Wojcik, I.; Armada-Moreira, A.; Stavrinidou, E. Plant Bioelectronics and Biohybrids: The Growing Contribution of Organic Electronic and Carbon-Based Materials. Chem. Rev. 2022, 122, 4847–4883. [Google Scholar] [CrossRef]
- Lee, G.; Wei, Q.; Zhu, Y. Emerging Wearable Sensors for Plant Health Monitoring. Adv. Funct. Mater. 2021, 31, 2106475. [Google Scholar] [CrossRef]
- Chai, Y.; Chen, C.; Luo, X.; Zhan, S.; Kim, J.; Luo, J.; Wang, X.; Hu, Z.; Ying, Y.; Liu, X. Cohabiting Plant-Wearable Sensor In Situ Monitors Water Transport in Plant. Adv. Sci. 2021, 8, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Jiang, J.; Zhang, S.; Wang, B.; Ding, H.; Wu, Z. Hydroprinted Liquid-Alloy-Based Morphing Electronics for Fast-Growing / Tender Plants: From Physiology Monitoring to Habit Manipulation. Small 2020, 16, 2003833. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, Q.; Chen, P. Flexible Strain Sensor Based on Carbon Black/Silver Nanoparticles Composite for Humanmotion Detection. Materials 2018, 11, 1836. [Google Scholar] [CrossRef] [Green Version]
- Ghidiu, M.; Lukatskaya, M.R.; Zhao, M.Q.; Gogotsi, Y.; Barsoum, M.W. Conductive Two-Dimensional Titanium Carbide “clay” with High Volumetric Capacitance. Nature 2014, 516, 78–81. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Teng, C.; Sun, Y.; Cai, L.; Xu, J.L.; Sun, M.; Li, X.; Yang, X.; Xiang, L.; Xie, D.; et al. Sprayed, Scalable, Wearable, and Portable NO2 Sensor Array Using Fully Flexible AgNPs-All-Carbon Nanostructures. ACS Appl. Mater. Interfaces 2018, 10, 34485–34493. [Google Scholar] [CrossRef]
- Lu, B.; Yuk, H.; Lin, S.; Jian, N.; Qu, K.; Xu, J.; Zhao, X. Pure PEDOT:PSS Hydrogels. Nat. Commun. 2019, 10, 1034. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Gao, G.; Zhou, Y.; Xu, T.; Chen, J.; Wang, R.; Zhang, R.; Fu, J. Tough, Adhesive, Self-Healable, and Transparent Ionically Conductive Zwitterionic Nanocomposite Hydrogels as Skin Strain Sensors. ACS Appl. Mater. Interfaces 2019, 11, 3506–3515. [Google Scholar] [CrossRef]
- Melzer, M.; Mönch, J.I.; Makarov, D.; Zabila, Y.; Bermúdez, G.S.C.; Karnaushenko, D.; Baunack, S.; Bahr, F.; Yan, C.; Kaltenbrunner, M.; et al. Wearable Magnetic Field Sensors for Flexible Electronics. Adv. Mater. 2015, 27, 1274–1280. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lan, L.; Le, X.; Dong, H.; Xie, J.; Ying, Y.; Ping, J. One-Step and Large-Scale Fabrication of Flexible and Wearable Humidity Sensor Based on Laser-Induced Graphene for Real-Time Tracking of Plant Transpiration at Bio-Interface. Biosens. Bioelectron. 2020, 165, 112360. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Wang, C.; Huang, Z.; Xu, S. Materials and Structures toward Soft Electronics. Adv. Mater. 2018, 30, 1801368. [Google Scholar] [CrossRef] [Green Version]
- Jang, K.I.; Li, K.; Chung, H.U.; Xu, S.; Jung, H.N.; Yang, Y.; Kwak, J.W.; Jung, H.H.; Song, J.; Yang, C.; et al. Self-Assembled Three Dimensional Network Designs for Soft Electronics. Nat. Commun. 2017, 8, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Tang, S.-Y.; Tabor, C.; Kalantar-Zadeh, K.; Dickey, M.D. Gallium Liquid Metal: The Devil’s Elixir. Annu. Rev. Mater. Res. 2021, 51, 1–28. [Google Scholar] [CrossRef]
- Wang, H.; Chen, S.; Li, H.; Chen, X.; Cheng, J.; Shao, Y.; Zhang, C.; Zhang, J.; Fan, L.; Chang, H.; et al. A Liquid Gripper Based on Phase Transitional Metallic Ferrofluid. Adv. Funct. Mater. 2021, 2100274, 1–9. [Google Scholar] [CrossRef]
- Chen, S.; Zhao, R.; Sun, X.; Wang, H.; Li, L.; Liu, J. Toxicity and Biocompatibility of Liquid Metals. Adv. Healthc. Mater. 2022, 12, 2201924. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Zhang, Y.; Guo, R.; Wang, H.; Yuan, B.; Liu, J. Conformable Liquid Metal Printed Epidermal Electronics for Smart Physiological Monitoring and Simulation Treatment. J. Micromech. Microeng. 2018, 28, 034003. [Google Scholar] [CrossRef]
- Rao, Z.; Ershad, F.; Almasri, A.; Gonzalez, L.; Wu, X.; Yu, C. Soft Electronics for the Skin: From Health Monitors to Human–Machine Interfaces. Adv. Mater. Technol. 2020, 5, 2000233. [Google Scholar] [CrossRef]
- Jiang, J.; Fei, W.; Pu, M.; Chai, Z.; Wu, Z. A Facile Liquid Alloy Wetting Enhancing Strategy on Super-Hydrophobic Lotus Leaves for Plant-Hybrid System Implementation. Adv. Mater. Interfaces 2022, 9, 1–9. [Google Scholar] [CrossRef]
- Doudrick, K.; Liu, S.; Mutunga, E.M.; Klein, K.L.; Damle, V.; Varanasi, K.K.; Rykaczewski, K. Different Shades of Oxide: From Nanoscale Wetting Mechanisms to Contact Printing of Gallium-Based Liquid Metals. Langmuir 2014, 30, 6867–6877. [Google Scholar] [CrossRef]
- Li, Y.; Feng, S.; Cao, S.; Zhang, J.; Kong, D. Printable Liquid Metal Microparticle Ink for Ultrastretchable Electronics. ACS Appl. Mater. Interfaces 2020, 12, 50852–50859. [Google Scholar] [CrossRef]
- Rastogi, A.; Zivcak, M.; Sytar, O.; Kalaji, H.M.; He, X.; Mbarki, S.; Brestic, M. Impact of Metal and Metal Oxide Nanoparticles on Plant: A Critical Review. Front. Chem. 2017, 5, 78. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Verma, S.K.; Das, A.K.; Gantait, S.; Kumar, V.; Gurel, E. Applications of Carbon Nanomaterials in the Plant System: A Perspective View on the Pros and Cons. Sci. Total Environ. 2019, 667, 485–499. [Google Scholar] [CrossRef]
- Li, Z.; Wang, L.; Li, Y.; Feng, Y.; Feng, W. Carbon-Based Functional Nanomaterials: Preparation, Properties and Applications. Compos. Sci. Technol. 2019, 179, 10–40. [Google Scholar] [CrossRef]
- Kour, R.; Arya, S.; Young, S.-J.; Gupta, V.; Bandhoria, P.; Khosla, A. Review—Recent Advances in Carbon Nanomaterials as Electrochemical Biosensors. J. Electrochem. Soc. 2020, 167, 037555. [Google Scholar] [CrossRef]
- Arduini, F.; Cinti, S.; Mazzaracchio, V.; Scognamiglio, V.; Amine, A.; Moscone, D. Carbon Black as an Outstanding and Affordable Nanomaterial for Electrochemical (Bio)Sensor Design. Biosens. Bioelectron. 2020, 156, 112033. [Google Scholar] [CrossRef] [PubMed]
- Lu, N.; Lu, C.; Yang, S.; Rogers, J. Highly Sensitive Skin-Mountable Strain Gauges Based Entirely on Elastomers. Adv. Funct. Mater. 2012, 22, 4044–4050. [Google Scholar] [CrossRef]
- Park, M.; Park, J.; Jeong, U. Design of Conductive Composite Elastomers for Stretchable Electronics. Nano Today 2014, 9, 244–260. [Google Scholar] [CrossRef]
- Shintake, J.; Piskarev, E.; Jeong, S.H.; Floreano, D. Ultrastretchable Strain Sensors Using Carbon Black-Filled Elastomer Composites and Comparison of Capacitive Versus Resistive Sensors. Adv. Mater. Technol. 2018, 3, 1700284. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Xiang, H.; Wang, Y.; Li, Z.; Qian, L.; Li, P.; Ma, Y.; Zhou, H.; Huang, W. A Flexible Multimodal Sensor That Detects Strain, Humidity, Temperature, and Pressure with Carbon Black and Reduced Graphene Oxide Hierarchical Composite on Paper. ACS Appl. Mater. Interfaces 2019, 11, 40613–40619. [Google Scholar] [CrossRef]
- Han, Z.; Li, H.; Xiao, J.; Song, H.; Li, B.; Cai, S.; Chen, Y.; Ma, Y.; Feng, X. Ultralow-Cost, Highly Sensitive, and Flexible Pressure Sensors Based on Carbon Black and Airlaid Paper for Wearable Electronics. ACS Appl. Mater. Interfaces 2019, 11, 33370–33379. [Google Scholar] [CrossRef]
- Park, J.; Lee, Y.; Hong, J.; Ha, M.; Jung, Y.D.; Lim, H.; Kim, S.Y.; Ko, H. Giant Tunneling Piezoresistance of Composite Elastomers with Interlocked Microdome Arrays for Ultrasensitive and Multimodal Electronic Skins. ACS Nano 2014, 8, 4689–4697. [Google Scholar] [CrossRef]
- Chai, Z.; Ke, X.; Chen, H.; Zhu, J.; Yong, H.; Jiang, J.; Zhang, S.; Guo, C.F.; Wu, Z. Anisotropic Shear-Sensitive Tactile Sensors with Programmable Elastomers for Robotic Manipulations. ACS Appl. Mater. Interfaces 2021, 13, 51426–51435. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Gao, S.; Zhu, J.; Li, J.; Xu, H.; Xu, K.; Cheng, H.; Huang, X. Multifunctional Stretchable Sensors for Continuous Monitoring of Long-Term Leaf Physiology and Microclimate. ACS Omega 2019, 4, 9522–9530. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.; Park, J.; Lee, M.S.; Kim, J.; Hyun, B.G.; Kang, D.J.; Na, K.; Lee, C.Y.; Bien, F.; Park, J.U. In-Situ Synthesis of Carbon Nanotube-Graphite Electronic Devices and Their Integrations onto Surfaces of Live Plants and Insects. Nano Lett. 2014, 14, 2647–2654. [Google Scholar] [CrossRef] [PubMed]
- Karousis, N.; Tagmatarchis, N.; Tasis, D. Current Progress on the Chemical Modification of Carbon Nanotubes. Chem. Rev. 2010, 110, 5366–5397. [Google Scholar] [CrossRef] [PubMed]
- Novoselov, K.S.; Jiang, D.; Schedin, F.; Booth, T.J.; Khotkevich, V.V.; Morozov, S.V.; Geim, A.K. Two-Dimensional Atomic Crystals. Proc. Natl. Acad. Sci. USA 2005, 102, 10451–10453. [Google Scholar] [CrossRef] [Green Version]
- Boland, C.S.; Khan, U.; Ryan, G.; Barwich, S.; Charifou, R.; Harvey, A.; Backes, C.; Li, Z.; Ferreira, M.S.; Möbius, M.E.; et al. Sensitive Electromechanical Sensors Using Viscoelastic Graphene-Polymer Nanocomposites. Science 2016, 354, 1257–1260. [Google Scholar] [CrossRef]
- Yavari, F.; Koratkar, N. Graphene-Based Chemical Sensors. J. Phys. Chem. Lett. 2012, 3, 1746–1753. [Google Scholar] [CrossRef]
- Zhao, F.; He, J.; Li, X.; Bai, Y.; Ying, Y.; Ping, J. Smart Plant-Wearable Biosensor for in-Situ Pesticide Analysis. Biosens. Bioelectron. 2020, 170, 112636. [Google Scholar] [CrossRef]
- Li, X.; Jiang, C.; Zhao, F.; Shao, Y.; Ying, Y.; Ping, J. A Self-Charging Device with Bionic Self-Cleaning Interface for Energy Harvesting. Nano Energy 2020, 73, 104738. [Google Scholar] [CrossRef]
- Oren, S.; Ceylan, H.; Schnable, P.S.; Dong, L. High-Resolution Patterning and Transferring of Graphene-Based Nanomaterials onto Tape toward Roll-to-Roll Production of Tape-Based Wearable Sensors. Adv. Mater. Technol. 2017, 2, 1700223. [Google Scholar] [CrossRef]
- Schedin, F.; Geim, A.K.; Morozov, S.V.; Hill, E.W.; Blake, P.; Katsnelson, M.I.; Novoselov, K.S. Detection of Individual Gas Molecules Adsorbed on Graphene. Nat. Mater. 2007, 6, 652–655. [Google Scholar] [CrossRef]
- Lv, C.; Hu, C.; Luo, J.; Liu, S.; Qiao, Y.; Zhang, Z.; Song, J.; Shi, Y.; Cai, J.; Watanabe, A. Recent Advances in Graphene-Based Humidity Sensors. Nanomaterials 2019, 9, 422. [Google Scholar] [CrossRef] [Green Version]
- Zhu, C.; Tao, L.Q.; Wang, Y.; Zheng, K.; Yu, J.; L, X.; Chen, X.; Huang, Y. Graphene Oxide Humidity Sensor with Laser-Induced Graphene Porous Electrodes. Sens. Actuators B Chem. 2020, 325, 128790. [Google Scholar] [CrossRef]
- Yao, Y.; Chen, X.; Zhu, J.; Zeng, B.; Wu, Z.; Li, X. The Effect of Ambient Humidity on the Electrical Properties of Graphene Oxide Films. Nanoscale Res. Lett. 2012, 7, 363. [Google Scholar] [CrossRef] [Green Version]
- Borini, S.; White, R.; Wei, D.; Astley, M.; Haque, S.; Spigone, E.; Harris, N.; Kivioja, J.; Ryha¨nen, T. Ultrafast Graphene Oxide Humidity Sensors. ACS Nano 2013, 7, 11166–11173. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Li, G.; Li, J.; Xu, S. Wearable Crop Sensor Based on Nano-Graphene Oxide for Noninvasive Real-Time Monitoring of Plant Water. Membranes 2022, 12, 358. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Geng, X.; Guo, Y.; Rong, J.; Gong, Y.; Wu, L.; Zhang, X.; Li, P.; Xu, J.; Cheng, G.; et al. Reduced Graphene Oxide Electrically Contacted Graphene Sensor for Highly Sensitive Nitric Oxide Detection. ACS Nano 2011, 5, 6955–6961. [Google Scholar] [CrossRef] [PubMed]
- Tang, W.; Yan, T.; Ping, J.; Wu, J.; Ying, Y. Rapid Fabrication of Flexible and Stretchable Strain Sensor by Chitosan-Based Water Ink for Plants Growth Monitoring. Adv. Mater. Technol. 2017, 2, 1700021. [Google Scholar] [CrossRef]
- Li, Z.; Liu, Y.; Hossain, O.; Paul, R.; Yao, S.; Wu, S.; Ristaino, J.B.; Zhu, Y.; Wei, Q. Real-Time Monitoring of Plant Stresses via Chemiresistive Profiling of Leaf Volatiles by a Wearable Sensor. Matter 2021, 4, 2553–2570. [Google Scholar] [CrossRef]
- Maduraiveeran, G.; Jin, W. Nanomaterials Based Electrochemical Sensor and Biosensor Platforms for Environmental Applications. Trends Environ. Anal. Chem. 2017, 13, 10–23. [Google Scholar] [CrossRef]
- Zheng, X.; Cheng, H. Special Topic: Flexible Electronics Manufacturing. Flexible and Stretchable Metal Oxide Gas Sensors for Healthcare. Sci. China Technol. Sci. 2019, 62, 209–223. [Google Scholar]
- Mitra, P.; Chatterjee, A.P.; Maiti, H.S. ZnO Thin Film Sensor. Mater. Lett. 1998, 35, 33–38. [Google Scholar] [CrossRef]
- Zappa, D.; Comini, E.; Zamani, R.; Arbiol, J.; Morante, J.R.; Sberveglieri, G. Preparation of Copper Oxide Nanowire-Based Conductometric Chemical Sensors. Sens. Actuators B Chem. 2013, 182, 7–15. [Google Scholar] [CrossRef]
- Law, M.; Kind, H.; Messer, B.; Kim, F.; Yang, P. Photochemical Sensing of NO2 with SnO2 Nanoribbon Nanosensors at Room Temperature. Angew. Chemie-Int. Ed. 2002, 41, 2405–2408. [Google Scholar] [CrossRef]
- Perillo, P.M.; Rodr�guez, D.F. Low Temperature Trimethylamine Flexible Gas Sensor Based on TiO2 Membrane Nanotubes. J. Alloys Compd. 2016, 657, 765–769. [Google Scholar] [CrossRef]
- Mohammadi, A.V.; Rosen, J.; Gogotsi, Y. The World of Two-Dimensional Carbides and Nitrides (MXenes). Science 2021, 372, eabf1581. [Google Scholar]
- Zhang, Y.Z.; Lee, K.H.; Anjum, D.H.; Sougrat, R.; Jiang, Q.; Kim, H.; Alshareef, H.N. MXenes Stretch Hydrogel Sensor Performance to New Limits. Sci. Adv. 2018, 4, eaat0098. [Google Scholar] [CrossRef] [Green Version]
- Lei, D.; Liu, N.; Su, T.; Zhang, Q.; Wang, L.; Ren, Z.; Gao, Y. Roles of MXene in Pressure Sensing: Preparation, Composite Structure Design, and Mechanism. Adv. Mater. 2022, 34, 2110608. [Google Scholar] [CrossRef]
- Kim, S.J.; Koh, H.J.; Ren, C.E.; Kwon, O.; Maleski, K.; Cho, S.Y.; Anasori, B.; Kim, C.K.; Choi, Y.K.; Kim, J.; et al. Metallic Ti3C2Tx MXene Gas Sensors with Ultrahigh Signal-to-Noise Ratio. ACS Nano 2018, 12, 986–993. [Google Scholar] [CrossRef] [Green Version]
- Mojtabavi, M.; Vahidmohammadi, A.; Liang, W.; Beidaghi, M.; Wanunu, M. Single-Molecule Sensing Using Nanopores in Two-Dimensional Transition Metal Carbide (MXene) Membranes. ACS Nano 2019, 13, 3042–3053. [Google Scholar] [CrossRef]
- Ho, D.H.; Choi, Y.Y.; Jo, S.B.; Myoung, J.M.; Cho, J.H. Sensing with MXenes: Progress and Prospects. Adv. Mater. 2021, 33, 2005846. [Google Scholar] [CrossRef] [PubMed]
- Lu, Y.; Xu, K.; Zhang, L.; Deguchi, M.; Shishido, H.; Arie, T.; Pan, R.; Hayashi, A.; Shen, L.; Akita, S.; et al. Multimodal Plant Healthcare Flexible Sensor System. ACS Nano 2020, 14, 10966–10975. [Google Scholar] [CrossRef]
- Ma, Z.Z.; Li, Q.H.; Wang, Z.; Gu, Z.G.; Zhang, J. Electrically Regulating Nonlinear Optical Limiting of Metal-Organic Framework Film. Nat. Commun. 2022, 13, 1–9. [Google Scholar] [CrossRef]
- Wang, T.; Gao, L.; Hou, J.; Herou, S.J.A.; Griffiths, J.T.; Li, W.; Dong, J.; Gao, S.; Titirici, M.M.; Kumar, R.V.; et al. Rational Approach to Guest Confinement inside MOF Cavities for Low-Temperature Catalysis. Nat. Commun. 2019, 10, 1–9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ding, M.; Flaig, R.W.; Jiang, H.L.; Yaghi, O.M. Carbon Capture and Conversion Using Metal-Organic Frameworks and MOF-Based Materials. Chem. Soc. Rev. 2019, 48, 2783–2828. [Google Scholar] [CrossRef]
- Qin, Y.; Howlader, M.M.R.; Deen, M.J.; Haddara, Y.M.; Selvaganapathy, P.R. Polymer Integration for Packaging of Implantable Sensors. Sens. Actuators B Chem. 2014, 202, 758–778. [Google Scholar] [CrossRef]
- Kamath, S.V.; Aruchamy, K.; Sanna Kotrappanavar, N. Conjugated Polymer-Based Smart Composites for Optoelectronics and Energy Applications; Elsevier Inc.: Bangalore, India, 2021. [Google Scholar]
- Kenawy, E.R.; Ghazy, A.R.; Al-Hossainy, A.F.; Rizk, H.F.; Shendy, S. Synthesis, Characterization, TD-DFT Method, and Optical Properties of Novel Nanofiber Conjugated Polymer. Synth. Met. 2022, 291, 117206. [Google Scholar] [CrossRef]
- Feast, W.J.; Tsibouklis, J.; Pouwer, K.L.; Groenendaal, L.; Meijer, E.W. Synthesis, Processing and Material Properties of Conjugated Polymers. Polymer 1996, 37, 5017–5047. [Google Scholar] [CrossRef] [Green Version]
- Arshak, K.; Velusamy, V.; Korostynska, O.; Oliwa-Stasiak, K.; Adley, C. Conducting Polymers and Their Applications to Biosensors: Emphasizing on Foodborne Pathogen Detection. IEEE Sens. J. 2009, 9, 1942–1951. [Google Scholar] [CrossRef]
- Yadav, P.K.; Kumar, S.; Maiti, P. Conjugated Polymers for Solar Cell Applications; Kumar, V., Sharma, K., Sehgal, R., Kalia, S., Eds.; Woodhead Publishing: Cambridge, UK, 2022. [Google Scholar]
- Guo, X.; Baumgarten, M.; Müllen, K. Designing π-Conjugated Polymers for Organic Electronics. Prog. Polym. Sci. 2013, 38, 1832–1908. [Google Scholar] [CrossRef]
- Pecher, J.; Mecking, S. Nanoparticles of Conjugated Polymers. Chem. Rev. 2010, 110, 6260–6279. [Google Scholar] [CrossRef]
- Wang, X.; Guo, R.; Liu, J. Liquid Metal Based Soft Robotics: Materials, Designs, and Applications. Adv. Mater. Technol. 2019, 4, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Ito, T.; Shirakawa, H.; Ikeda, S. Simultaneous Polymerization and Formation of Polyacetylene Film on the Surface of Concentrated Soluble Ziegler-Type Catalyst Solution. J. Polym. Sci. Part A Polym. Chem. 1996, 34, 2533–2542. [Google Scholar] [CrossRef]
- Bubniene, U.S.; Ratautaite, V.; Ramanavicius, A.; Bucinskas, V. Conducting Polymers for the Design of Tactile Sensors. Polymers 2022, 14, 2984. [Google Scholar] [CrossRef]
- Li, W.; Huang, H.; Li, Y.; Deng, J. Particles of Polyacetylene and Its Derivatives: Preparation and Applications. Polym. Chem. 2014, 5, 1107–1118. [Google Scholar] [CrossRef]
- Edwards, J.H.; Feast, W.J. A New Synthesis of Poly(Acetylene). Polymer 1980, 21, 595–596. [Google Scholar] [CrossRef]
- Skotheim, T.A. Conjugated Polymers; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Lin, X.; Zhang, T.; Cao, J.; Wen, H.; Fei, T.; Liu, S.; Wang, R.; Ren, H.; Zhao, H. Flexible Piezoresistive Sensors Based on Conducting Polymer-Coated Fabric Applied to Human Physiological Signals Monitoring. J. Bionic Eng. 2020, 17, 55–63. [Google Scholar] [CrossRef]
- Chiang, J.C.; MacDiarmid, A.G. “Polyaniline”: Protonic Acid Doping of the Emeraldine Form to the Metallic Regime. Synth. Met. 1986, 13, 193–205. [Google Scholar] [CrossRef]
- Güven, O. Radiation-Induced Conductivity Control in Polyaniline Blends/Composites. Radiat. Phys. Chem. 2007, 76, 1302–1307. [Google Scholar] [CrossRef]
- Dridi, C.; Chaieb, A.; Hassen, F.; Majdoub, M.; Gamoudi, M. Synthesis and Characterization of a Conducting Copolymer. Synth. Met. 1997, 90, 233–237. [Google Scholar] [CrossRef]
- Macdiarmid, A.G.; Chiang, J.C.; Richter, A.F.; Epstein, A.J. Polyaniline: A New Concept in Conducting Polymers. Synth. Met. 1987, 18, 285–290. [Google Scholar] [CrossRef]
- Wang, L.; Jing, X.; Wang, F. On the Iodine-Doping of Polyaniline and Poly-Ortho-Methylaniline. Synth. Met. 1991, 41, 739–744. [Google Scholar] [CrossRef]
- Popov, A.; Brasiunas, B.; Mikoliunaite, L.; Bagdziunas, G.; Ramanavicius, A.; Ramanaviciene, A. Comparative Study of Polyaniline (PANI), Poly(3,4-Ethylenedioxythiophene) (PEDOT) and PANI-PEDOT Films Electrochemically Deposited on Transparent Indium Thin Oxide Based Electrodes. Polymer 2019, 172, 133–141. [Google Scholar] [CrossRef]
- Matsumura, S.; Hlil, A.R.; Lepiller, C.; Gaudet, J.; Guay, D.; Shi, Z.; Holdcroft, S.; Hay, A.S. Stability and Utility of Pyridyl Disulfide Functionality in RAFT and Conventional Radical Polymerizations. J. Polym. Sci. Part A Polym. Chem. 2008, 46, 7207–7224. [Google Scholar]
- Song, S.; Jin, Y.; Kim, S.H.; Moon, J.; Kim, K.; Kim, J.Y.; Park, S.H.; Lee, K.; Suh, H. Stabilized Polymers with Novel Indenoindene Backbone against Photodegradation for LEDs and Solar Cells. Macromolecules 2008, 41, 7296–7305. [Google Scholar] [CrossRef]
- Yi, C.; Shen, L.; Zheng, J.; Gong, X. A Negative Piezo-Conductive Effect from Doped Semiconducting Polymer Thin Films. Sci. Rep. 2021, 11, 1–11. [Google Scholar] [CrossRef]
- Peng, Q.; Chen, J.; Wang, T.; Peng, X.; Liu, J.; Wang, X.; Wang, J.; Zeng, H. Recent Advances in Designing Conductive Hydrogels for Flexible Electronics. InfoMat 2020, 2, 843–865. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Cong, Y.; Fu, J. Stretchable and Tough Conductive Hydrogels for Flexible Pressure and Strain Sensors. J. Mater. Chem. B 2020, 8, 3437–3459. [Google Scholar] [CrossRef]
- Kong, W.; Wang, C.; Jia, C.; Kuang, Y.; Pastel, G.; Chen, C.; Chen, G.; He, S.; Huang, H.; Zhang, J.; et al. Muscle-Inspired Highly Anisotropic, Strong, Ion-Conductive Hydrogels. Adv. Mater. 2018, 30, 1–7. [Google Scholar] [CrossRef]
- Zhou, Y.; Wan, C.; Yang, Y.; Yang, H.; Wang, S.; Dai, Z.; Ji, K.; Jiang, H.; Chen, X.; Long, Y. Highly Stretchable, Elastic, and Ionic Conductive Hydrogel for Artificial Soft Electronics. Adv. Funct. Mater. 2019, 29, 1–8. [Google Scholar] [CrossRef]
- Long, T.; Li, Y.; Fang, X.; Sun, J. Salt-Mediated Polyampholyte Hydrogels with High Mechanical Strength, Excellent Self-Healing Property, and Satisfactory Electrical Conductivity. Adv. Funct. Mater. 2018, 28, 1–9. [Google Scholar] [CrossRef]
- Rong, Q.; Lei, W.; Liu, M. Conductive Hydrogels as Smart Materials for Flexible Electronic Devices. Chem.-A Eur. J. 2018, 24, 16930–16943. [Google Scholar] [CrossRef]
- Peng, X.; Liu, H.; Yin, Q.; Wu, J.; Chen, P.; Zhang, G.; Liu, G.; Wu, C.; Xie, Y. A Zwitterionic Gel Electrolyte for Efficient Solid-State Supercapacitors. Nat. Commun. 2016, 7, 11782. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wu, Y.; Luo, Y.; Cuthbert, T.J.; Shokurov, A.V.; Chu, P.K.; Feng, S.P.; Menon, C. Hydrogels as Soft Ionic Conductors in Flexible and Wearable Triboelectric Nanogenerators. Adv. Sci. 2022, 9, 1–24. [Google Scholar] [CrossRef]
- Qi, J.; Wang, A.C.; Yang, W.; Zhang, M.; Hou, C.; Zhang, Q.; Li, Y.; Wang, H. Hydrogel-Based Hierarchically Wrinkled Stretchable Nanofibrous Membrane for High Performance Wearable Triboelectric Nanogenerator. Nano Energy 2020, 67, 104206. [Google Scholar] [CrossRef]
- Wu, Y.; Qu, J.; Zhang, X.; Ao, K.; Zhou, Z.; Zheng, Z.; Mu, Y.; Wu, X.; Luo, Y.; Feng, S.P. Biomechanical Energy Harvesters Based on Ionic Conductive Organohydrogels via the Hofmeister Effect and Electrostatic Interaction. ACS Nano 2021, 15, 13427–13435. [Google Scholar] [CrossRef]
- Wu, Y.; Mu, Y.; Luo, Y.; Menon, C.; Zhou, Z.; Chu, P.K.; Feng, S.P. Hofmeister Effect and Electrostatic Interaction Enhanced Ionic Conductive Organohydrogels for Electronic Applications. Adv. Funct. Mater. 2022, 32, 1–8. [Google Scholar] [CrossRef]
- Malik, A.; Kandasubramanian, B. Flexible Polymeric Substrates for Electronic Applications. Polym. Rev. 2018, 58, 630–667. [Google Scholar] [CrossRef]
- Maurer, J.H.M.; González-García, L.; Reiser, B.; Kanelidis, I.; Kraus, T. Templated Self-Assembly of Ultrathin Gold Nanowires by Nanoimprinting for Transparent Flexible Electronics. Nano Lett. 2016, 16, 2921–2925. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cheng, T.; Zhang, Y.; Lai, W.Y.; Huang, W. Stretchable Thin-Film Electrodes for Flexible Electronics with High Deformability and Stretchability. Adv. Mater. 2015, 27, 3349–3376. [Google Scholar] [CrossRef] [PubMed]
- Jung, Y.H.; Chang, T.H.; Zhang, H.; Yao, C.; Zheng, Q.; Yang, V.W.; Mi, H.; Kim, M.; Cho, S.J.; Park, D.W.; et al. High-Performance Green Flexible Electronics Based on Biodegradable Cellulose Nanofibril Paper. Nat. Commun. 2015, 6, 7170. [Google Scholar] [CrossRef] [Green Version]
- Cai, G.; Wang, J.; Qian, K.; Chen, J.; Li, S.; Lee, P.S. Extremely Stretchable Strain Sensors Based on Conductive Self-Healing Dynamic Cross-Links Hydrogels for Human-Motion Detection. Adv. Sci. 2017, 4, 1600190. [Google Scholar] [CrossRef] [Green Version]
- Hollenberg, B.A.; Richards, C.D.; Richards, R.; Bahr, D.F.; Rector, D.M. A MEMS Fabricated Flexible Electrode Array for Recording Surface Field Potentials. J. Neurosci. Methods 2006, 153, 147–153. [Google Scholar] [CrossRef] [PubMed]
- Jothi, L.; Nageswaran, G. Plasma Modified Polymeric Materials for Biosensors/Biodevice Applications; Elsevier Inc.: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Jeong, S.H.; Zhang, S.; Hjort, K.; Hilborn, J.; Wu, Z.G. PDMS-Based Elastomer Tuned Soft, Stretchable, and Sticky for Epidermal Electronics. Adv. Mater. 2016, 28, 5830–5836. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Zhang, S.; Vorobyev, A.; Gamstedt, K.; Wu, K.; Guo, C.; Jeong, S.H. Seamless Modulus Gradient Structures for Highly Resilient, Stretchable System Integration. Mater. Today Phys. 2018, 4, 28–35. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, L.; Zhang, Z.; Sun, P.; Chen, H. High-Sensitivity Wearable and Flexible Humidity Sensor Based on Graphene Oxide/Non-Woven Fabric for Respiration Monitoring. Langmuir 2020, 36, 9443–9448. [Google Scholar] [CrossRef]
- Kaliyaraj Selva Kumar, A.; Zhang, Y.; Li, D.; Compton, R.G. A Mini-Review: How Reliable Is the Drop Casting Technique? Electrochem. Commun. 2020, 121, 106867. [Google Scholar] [CrossRef]
- Li, H.Y.; Lee, C.S.; Kim, D.H.; Lee, J.H. Flexible Room-Temperature NH3 Sensor for Ultrasensitive, Selective, and Humidity-Independent Gas Detection. ACS Appl. Mater. Interfaces 2018, 10, 27858–27867. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.J.; Andrew, T.L. Real-Time and Noninvasive Detection of UV-Induced Deep Tissue Damage Using Electrical Tattoos. Biosens. Bioelectron. 2020, 150, 111909. [Google Scholar] [CrossRef]
- Chung, H.U.; Kim, B.H.; Lee, J.Y.; Lee, J.; Xie, Z.; Ibler, E.M.; Lee, K.H.; Banks, A.; Jeong, J.Y.; Kim, J.; et al. Binodal, Wireless Epidermal Electronic Systems with in-Sensor Analytics for Neonatal Intensive Care. Science 2019, 363, eaau0780. [Google Scholar] [CrossRef] [Green Version]
- Li, G.; Chen, X.; Zhou, F.; Liang, Y.; Xiao, Y.; Cao, X.; Zhang, Z.; Zhang, M.; Wu, B.; Yin, S.; et al. Self-Powered Soft Robot in the Mariana Trench. Nature 2021, 591, 66–71. [Google Scholar] [CrossRef] [PubMed]
- Shyu, T.C.; Damasceno, P.F.; Dodd, P.M.; Lamoureux, A.; Xu, L.; Shlian, M.; Shtein, M.; Glotzer, S.C.; Kotov, N.A. A Kirigami Approach to Engineering Elasticity in Nanocomposites through Patterned Defects. Nat. Mater. 2015, 14, 785–789. [Google Scholar] [CrossRef] [Green Version]
- Won, P.; Park, J.J.; Lee, T.; Ha, I.; Han, S.; Choi, M.; Lee, J.; Hong, S.; Cho, K.-J.; Ko, S.H. Stretchable and Transparent Kirigami Conductor of Nanowire Percolation Network for Electronic Skin Applications. Nano Lett. 2019, 19, 6087–6096. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.; Hao, Y.; Li, Y.; Hu, H.; Wang, C.; Nomoto, A.; Pan, T.; Gu, Y.; Chen, Y.; Zhang, T.; et al. Three-Dimensional Integrated Stretchable Electronics. Nat. Electron. 2018, 1, 473–480. [Google Scholar] [CrossRef]
- Ye, R.; James, D.K.; Tour, J.M. Laser-Induced Graphene: From Discovery to Translation. Adv. Mater. 2019, 31, 1–15. [Google Scholar] [CrossRef]
- Araromi, O.A.; Conn, A.T.; Ling, C.S.; Rossiter, J.M.; Vaidyanathan, R.; Burgess, S.C. Spray Deposited Multilayered Dielectric Elastomer Actuators. Sens. Actuators A Phys. 2011, 167, 459–467. [Google Scholar] [CrossRef]
- Seo, M.; Hwang, S.; Hwang, T.; Yeo, J. Fabrication of Soft Sensor Using Laser Processing Techniques: For the Alternative 3D Printing Process. Materials 2019, 12, 2955. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, B.; Gao, J.; Jiang, J.; Hu, Z.; Hjort, K.; Guo, Z.; Wu, Z. Liquid Metal Microscale Deposition Enabled High Resolution and Density Epidermal Microheater for Localized Ectopic Expression in Drosophila. Adv. Mater. Technol. 2022, 7, 1–9. [Google Scholar] [CrossRef]
- Zhang, S.; Jiang, J.; Jiang, Q.; Fei, W.; Guo, C.F.; Wu, Z. Dynamically Conformal Mask Printing of Liquid Alloy Circuits on Morphing Objects. Adv. Mater. Technol. 2021, 6, 2001274. [Google Scholar] [CrossRef]
- Zhang, Y.; Yin, C.; Zheng, C.; Zhou, K. Computational Hydrographic Printing. ACM Trans. Graph. 2015, 34, 1–11. [Google Scholar] [CrossRef]
- Le Borgne, B.; De Sagazan, O.; Crand, S.; Jacques, E.; Harnois, M. Conformal Electronics Wrapped Around Daily Life Objects Using an Original Method: Water Transfer Printing. ACS Appl. Mater. Interfaces 2017, 9, 29424–29429. [Google Scholar] [CrossRef] [PubMed]
- Borgne, B.L.; Liu, S.; Morvan, X.; Crand, S.; Sporea, R.A.; Lu, N.; Harnois, M. Water Transfer Printing Enhanced by Water-Induced Pattern Expansion: Toward Large-Area 3D Electronics. Adv. Mater. Technol. 2019, 4, 1800600. [Google Scholar] [CrossRef]
- Saada, G.; Layani, M.; Chernevousky, A.; Magdassi, S. Hydroprinting Conductive Patterns onto 3D Structures. Adv. Mater. Technol. 2017, 2, 1600289. [Google Scholar] [CrossRef]
- Ng, L.W.T.; Zhu, X.; Hu, G.; Macadam, N.; Um, D.; Wu, T.C.; Le Moal, F.; Jones, C.; Hasan, T. Conformal Printing of Graphene for Single- and Multilayered Devices onto Arbitrarily Shaped 3D Surfaces. Adv. Funct. Mater. 2019, 29, 1807933. [Google Scholar] [CrossRef]
- Lopes, P.A.; Paisana, H.; De Almeida, A.T.; Majidi, C.; Tavakoli, M. Hydroprinted Electronics: Ultrathin Stretchable Ag-In-Ga E-Skin for Bioelectronics and Human-Machine Interaction. ACS Appl. Mater. Interfaces 2018, 10, 38760–38768. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Liu, X.; Wu, X.; Liu, Q.; Wang, Z. A Carbon Black/Polyvinyl Alcohol-Based Composite Thin Film Sensor Integrating Strain and Humidity Sensing Using the Droplet Deposition Method. Crystals 2022, 12, 1316. [Google Scholar] [CrossRef]
- Xuan, W.; He, X.; Chen, J.; Wang, W.; Wang, X.; Xu, Y.; Xu, Z.; Fu, Y.Q.; Luo, J.K. High Sensitivity Flexible Lamb-Wave Humidity Sensors with a Graphene Oxide Sensing Layer. Nanoscale 2015, 7, 7430–7436. [Google Scholar] [CrossRef] [Green Version]
- Trung, T.Q.; Duy, L.T.; Ramasundaram, S.; Lee, N.E. Transparent, Stretchable, and Rapid-Response Humidity Sensor for Body-Attachable Wearable Electronics. Nano Res. 2017, 10, 2021–2033. [Google Scholar] [CrossRef]
- Parmar, M.; Balamurugan, C.; Lee, D.W. PANI and Graphene/PANI Nanocomposite Films-Comparative Toluene Gas Sensing Behavior. Sensors 2013, 13, 16611–16624. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Fei, W.; Jiang, Q.; Jiang, J.; Shi, K.; Xue, L.; Wu, Z. Facile Fabrication of Sensitivity-Tunable Strain Sensors Based on Laser-Patterned Micro-Nano Structures. J. Micromech. Microeng. 2021, 31, 085003. [Google Scholar] [CrossRef]
- Li, X.; Xu, J.; Jiang, Y.; He, Z.; Liu, B.; Xie, H.; Li, H.; Li, Z.; Wang, Y.; Tai, H. Toward Agricultural Ammonia Volatilization Monitoring: A Flexible Polyaniline/Ti3C2Tx Hybrid Sensitive Films Based Gas Sensor. Sens. Actuators B Chem. 2020, 316. [Google Scholar] [CrossRef]
- Durrani, S.M.A.; Al-Kuhaili, M.F.; Bakhtiari, I.A. Carbon Monoxide Gas-Sensing Properties of Electron-Beam Deposited Cerium Oxide Thin Films. Sens. Actuators B Chem. 2008, 134, 934–939. [Google Scholar] [CrossRef]
- Jeong, W.; Song, J.; Bae, J.; Nandanapalli, K.R.; Lee, S. Breathable Nanomesh Humidity Sensor for Real-Time Skin Humidity Monitoring. ACS Appl. Mater. Interfaces 2019, 11, 44758–44763. [Google Scholar] [CrossRef]
- Nassar, J.M.; Khan, S.M.; Villalva, D.R.; Nour, M.M.; Almuslem, A.S.; Hussain, M.M. Compliant Plant Wearables for Localized Microclimate and Plant Growth Monitoring. NPJ Flex. Electron. 2018, 2, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Sun, L.; Yuan, G.; Gao, L.; Yang, J.; Chhowalla, M.; Gharahcheshmeh, M.H.; Gleason, K.K.; Choi, Y.S.; Hong, B.H.; Liu, Z. Chemical Vapour Deposition. Nat. Rev. Methods Prim. 2021, 1, 5. [Google Scholar] [CrossRef]
- Park, J.U.; Nam, S.; Lee, M.S.; Lieber, C.M. Synthesis of Monolithic Graphene-Graphite Integrated Electronics. Nat. Mater. 2012, 11, 120–125. [Google Scholar] [CrossRef]
- Chen, C.W.; Hung, S.C.; Yang, M.D.; Yeh, C.W.; Wu, C.H.; Chi, G.C.; Ren, F.; Pearton, S.J. Oxygen Sensors Made by Monolayer Graphene under Room Temperature. Appl. Phys. Lett. 2011, 99, 243502. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.J.; Fan, R.; Allison, L.K.; Andrew, T.L. On-Site Identification of Ozone Damage in Fruiting Plants Using Vapor-Deposited Conducting Polymer Tattoos. Sci. Adv. 2020, 6, eabc3296. [Google Scholar] [CrossRef]
- Kim, J.J.; Allison, L.K.; Andrew, T.L. Vapor-Printed Polymer Electrodes for Long-Term, on-Demand Health Monitoring. Sci. Adv. 2019, 5, eaaw0463. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.Y.; Wu, G.W.; Hsieh, W.J. Fabrication of Micro Sensors on a Flexible Substrate. Sens. Actuators A Phys. 2008, 147, 173–176. [Google Scholar] [CrossRef]
- Ozaydin-Ince, G.; Coclite, A.M.; Gleason, K.K. CVD of Polymeric Thin Films: Applications in Sensors, Biotechnology, Microelectronics/Organic Electronics, Microfluidics, MEMS, Composites and Membranes. Rep. Prog. Phys. 2012, 75, 016501. [Google Scholar] [CrossRef]
- Tang, W.; Yan, T.; Wang, F.; Yang, J.; Wu, J.; Wang, J.; Yue, T.; Li, Z. Rapid Fabrication of Wearable Carbon Nanotube/Graphite Strain Sensor for Real-Time Monitoring of Plant Growth. Carbon 2019, 147, 295–302. [Google Scholar] [CrossRef]
- Hsu, H.H.; Zhang, X.; Xu, K.; Wang, Y.; Wang, Q.; Luo, G.; Xing, M.; Zhong, W. Self-Powered and Plant-Wearable Hydrogel as LED Power Supply and Sensor for Promoting and Monitoring Plant Growth in Smart Farming. Chem. Eng. J. 2021, 422, 129499. [Google Scholar] [CrossRef]
- Yin, S.; Ibrahim, H.; Schnable, P.S.; Castellano, M.J.; Dong, L. A Field-Deployable, Wearable Leaf Sensor for Continuous Monitoring of Vapor-Pressure Deficit. Adv. Mater. Technol. 2021, 6, 2001246. [Google Scholar] [CrossRef]
- Meder, F.; Thielen, M.; Mondini, A.; Speck, T.; Mazzolai, B. Living Plant-Hybrid Generators for Multidirectional Wind Energy Conversion. Energy Technol. 2020, 8, 2000236. [Google Scholar] [CrossRef]
- Li, W.; Matsuhisa, N.; Liu, Z.; Wang, M.; Luo, Y.; Cai, P.; Chen, G.; Zhang, F.; Li, C.; Liu, Z.; et al. An On-Demand Plant-Based Actuator Created Using Conformable Electrodes. Nat. Electron. 2021, 4, 134–142. [Google Scholar] [CrossRef]
- Meder, F.; Naselli, G.A.; Mazzolai, B. Wind Dynamics and Leaf Motion: Approaching the Design of High-Tech Devices for Energy Harvesting for Operation on Plant Leaves. Front. Plant Sci. 2022, 13, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Meder, F.; Mondini, A.; Visentin, F.; Zini, G.; Crepaldi, M.; Mazzolai, B. Multisource Energy Conversion in Plants with Soft Epicuticular Coatings. Energy Environ. Sci. 2022, 15, 2545–2556. [Google Scholar] [CrossRef]
- Wicaksana, A. Plant Electrophysiology: Signaling and Responses; Volkov, A.G., Ed.; Springer: New York, NY, USA, 2012. [Google Scholar]
- Meder, F.; Saar, S.; Taccola, S.; Filippeschi, C.; Mattoli, V.; Mazzolai, B. Ultraconformable, Self-Adhering Surface Electrodes for Measuring Electrical Signals in Plants. Adv. Mater. Technol. 2021, 6, 2001182. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Q.; Chai, Z.; Zong, Z.; Hu, Z.; Zhang, S.; Wu, Z. Micro/Nano Soft Film Sensors for Intelligent Plant Systems: Materials, Fabrications, and Applications. Chemosensors 2023, 11, 197. https://doi.org/10.3390/chemosensors11030197
Jiang Q, Chai Z, Zong Z, Hu Z, Zhang S, Wu Z. Micro/Nano Soft Film Sensors for Intelligent Plant Systems: Materials, Fabrications, and Applications. Chemosensors. 2023; 11(3):197. https://doi.org/10.3390/chemosensors11030197
Chicago/Turabian StyleJiang, Qin, Zhiping Chai, Zisheng Zong, Zhitong Hu, Shuo Zhang, and Zhigang Wu. 2023. "Micro/Nano Soft Film Sensors for Intelligent Plant Systems: Materials, Fabrications, and Applications" Chemosensors 11, no. 3: 197. https://doi.org/10.3390/chemosensors11030197