
Secure Data Transmission Based on Adaptive Chattering-Free Sliding Mode Synchronization of Unified Chaotic Systems



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. System Description and Problem Formulation
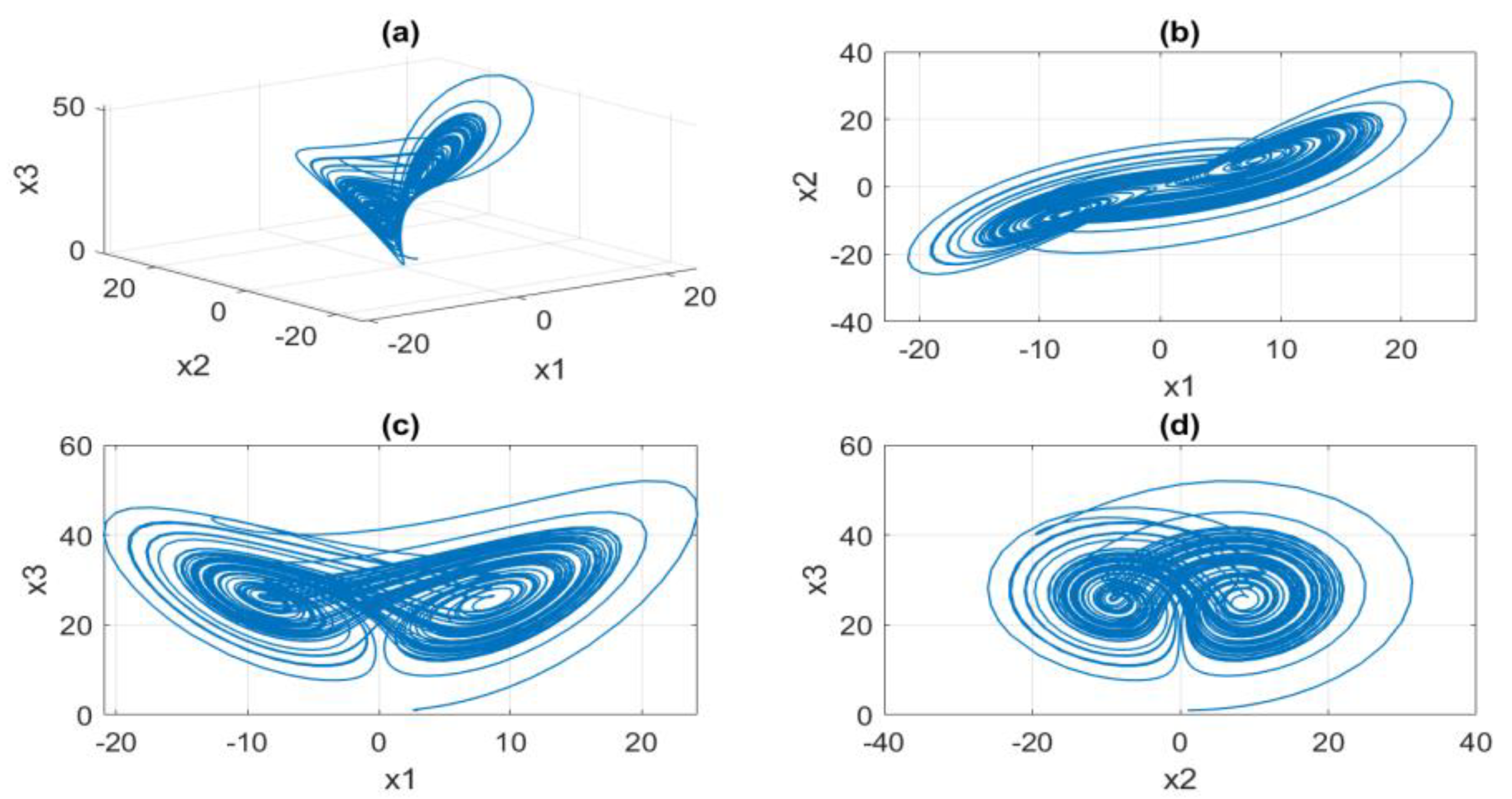
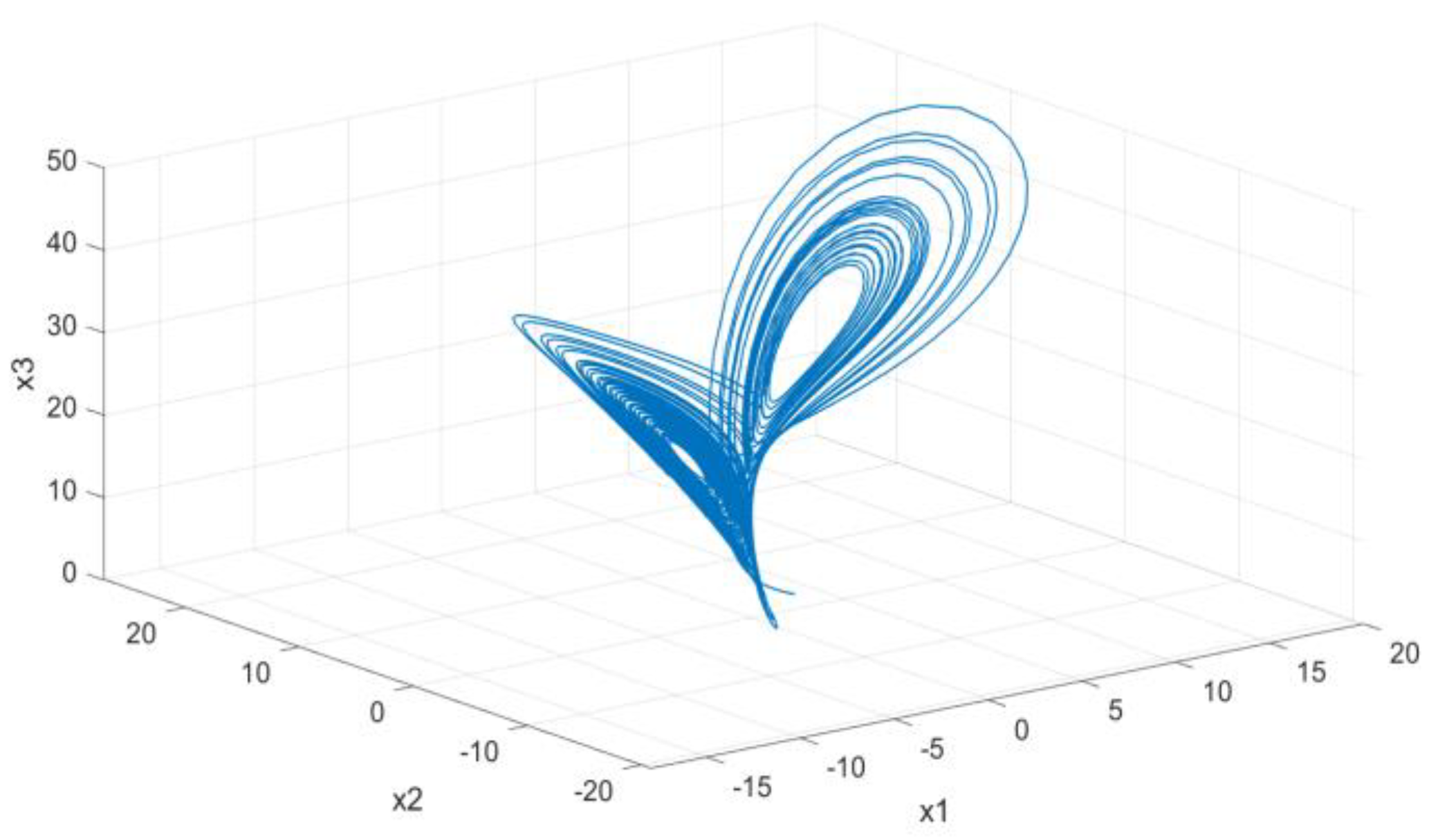
2.1. Unified Chaotic Systems
2.2. Communication Structure and Synchronization Problem Formulation
3. Switching Function Design of SMC for Synchronization
4. Adaptive Continuous SMC Design without Chattering
- Step 1: Embed the secret datainto the master unified system (2).
- Step 2: Introduce an augmented state as Equation (7) and construct the augmented error dynamics as Equation (10).
- Step 3: Choose an appropriate matrix K to make the eigenvaluesofsatisfyto result in the stable sliding manifold.
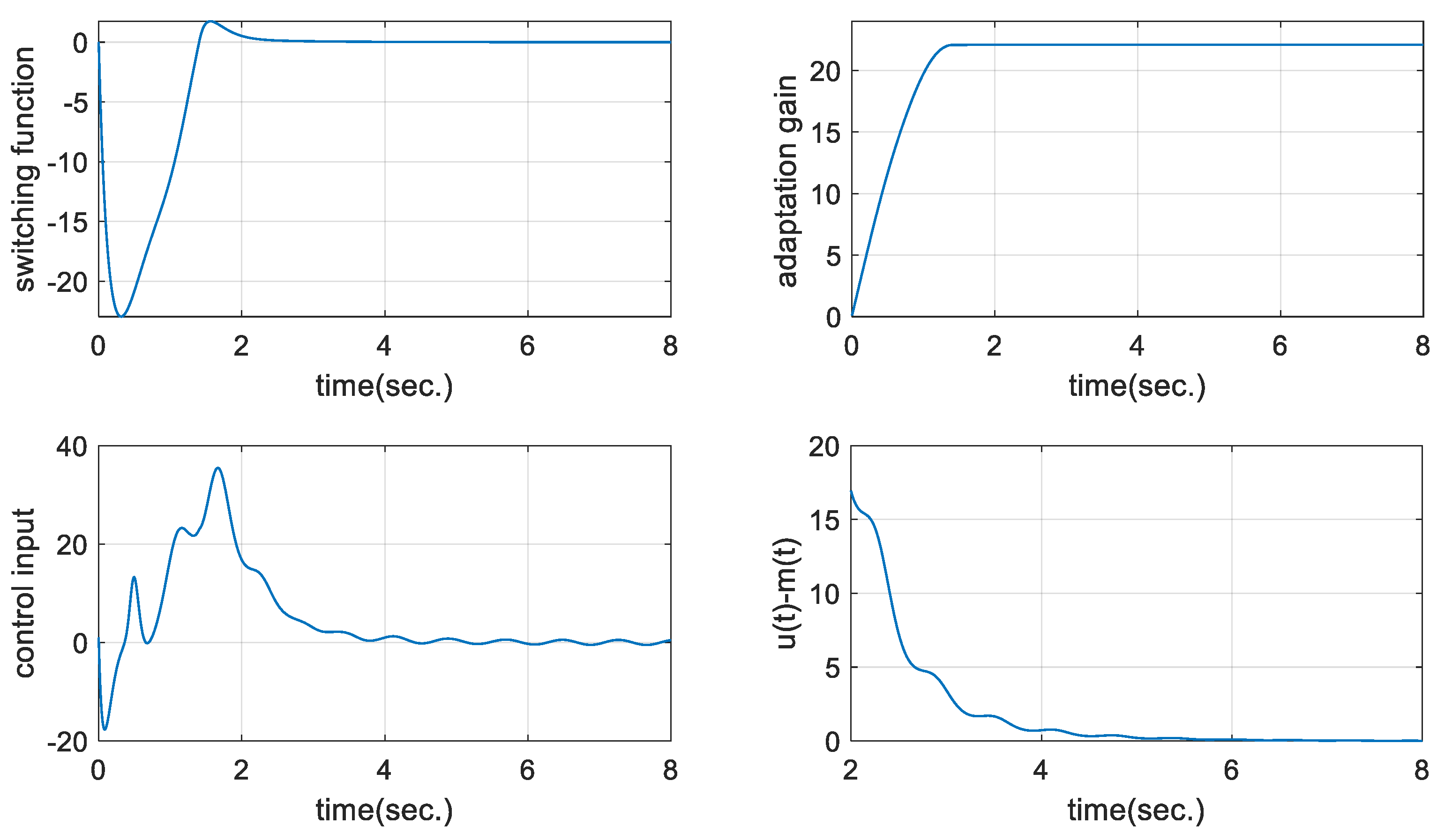
- Step 4: Establish the switching functionin Equation (11).
- Step 5: Construct the continuous SMC from Equation (16) or Equation (17) with the adaptive law (18).
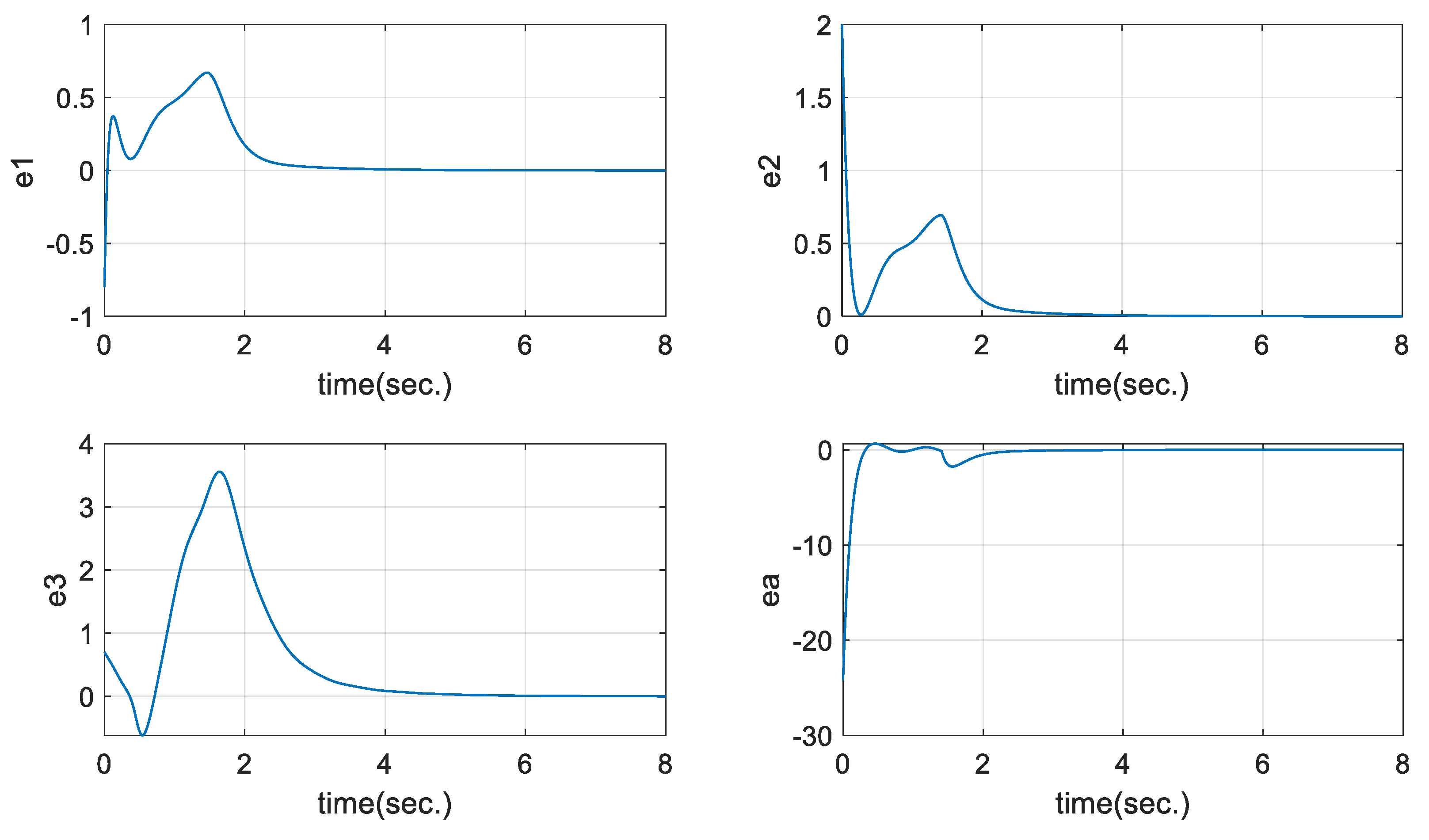
- Step 6: Achieve the robust synchronization and precisely recover the embedded secret message at the receiver.
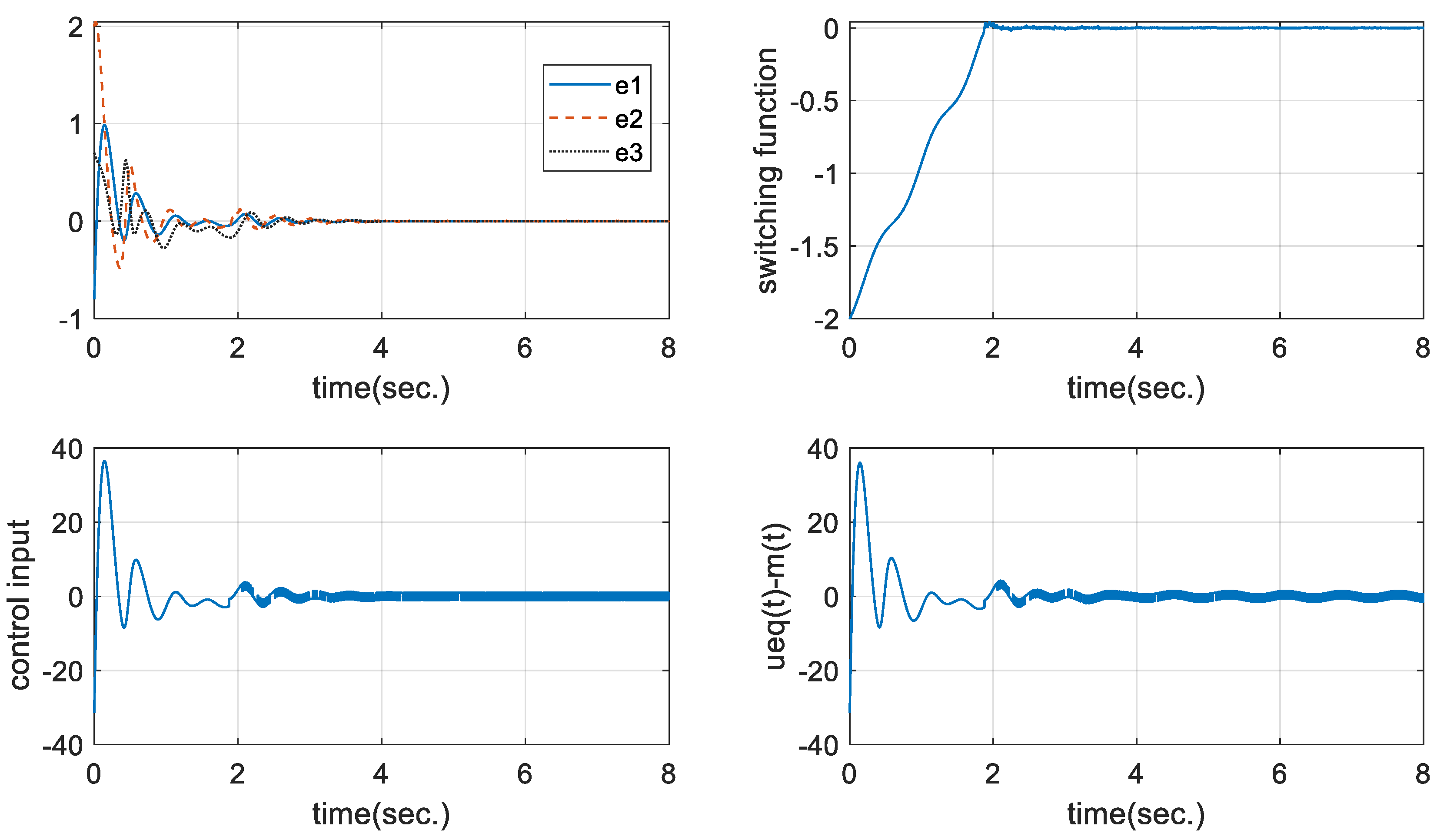
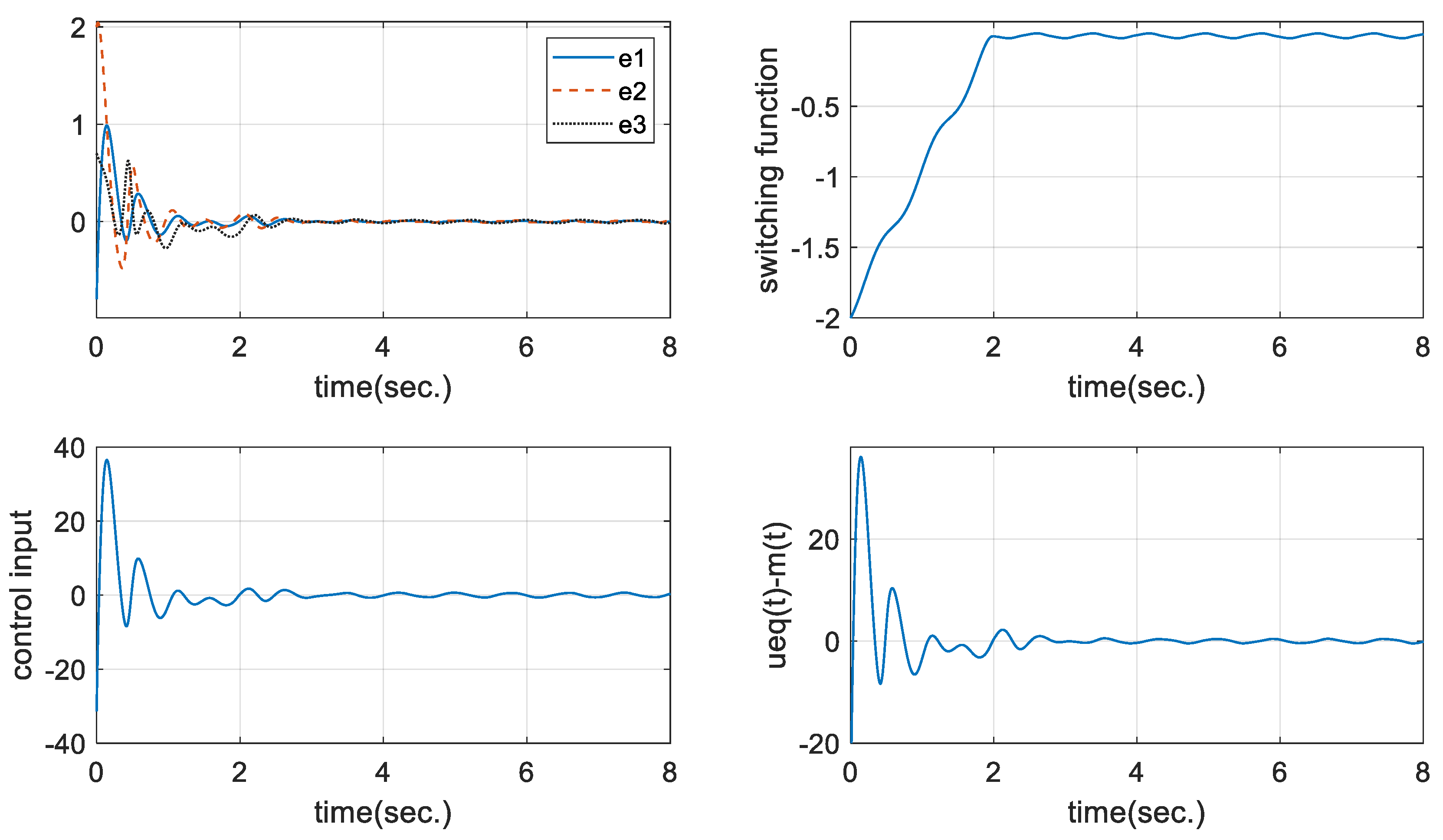
5. Numerical Simulations
- Step 1: The secret data is embedded to the master system (2) with .
- Step 2: With and the augmented state in Equation (15), the augmented error dynamics is obtained as
- Step 3: Choose the matrix such that the eigenvalues of are to result in a stable sliding manifold.
- Step 4: Consequently, the switching function is constructed as:
- Step 5: From Equation (16) or Equation (17) with the adaptive law (18), the chattering-free adaptive SMC scheme with is obtained asOrthe adaptive law is designed as .
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lorenz, E.N. Deterministic nonperiodic flows. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef] [Green Version]
- Vanecek, A.; Celikovsky, S. Control Systems: From Linear Analysis to Synthesis of Chaos; Prentice-Hall International: London, UK, 1996. [Google Scholar]
- Yau, H.T.; Chen, C.K.; Chen, C.L. Sliding mode control of chaotic systems with uncertainties. Int. J. Bifur. Chaos. 2000, 10, 1139–1147. [Google Scholar] [CrossRef]
- Lee, S.M.; Ji, D.H.; Park, J.H.; Won, S.C. H∞ synchronization of chaotic systems via dynamic feedback approach. Phys. Lett. A 2008, 372, 4905–4912. [Google Scholar] [CrossRef]
- Qin, Z.; Wang, J.L.; Huang, Y.L.; Ren, S.Y. Synchronization and H synchronization of multi-weighted complex delayed dynamical networks with fxed and switching topologies. J. Frankl. Inst. 2017, 354, 7119–7138. [Google Scholar] [CrossRef]
- Gao, X.J.; Hu, H.P. Adaptive–impulsive synchronization and parameters estimation of chaotic systems with unknown parameters by using discontinuous drive signals. Appl. Math. Model. 2015, 39, 3980–3989. [Google Scholar] [CrossRef]
- Tam, L.M.; Chen, H.K.; Li, S.Y. Adaptive synchronization of complicated chaotic systems with uncertainties via fuzzy modeling-based control strategy. Inf. Sci. 2018, 427, 18–31. [Google Scholar] [CrossRef]
- Chen, X.Y.; Park, J.H.; Cao, J.D.; Qiu, J. Adaptive synchronization of multiple uncertain coupled chaotic systems via sliding mode control. Neurocomputing 2018, 273, 9–21. [Google Scholar] [CrossRef]
- Boulkroune, A.; Bouzeriba, A.; Hamel, S.; Bouden, T. A projective synchronization scheme based on fuzzy adaptive control for unknown multivariable chaotic systems. Nonlinear Dyn. 2014, 78, 433–447. [Google Scholar] [CrossRef]
- Yan, J.J.; Chen, C.Y.; Tsai, J.S.-H. Hybrid chaos control of continuous unified chaotic systems using discrete rippling sliding mode control, Nonlinear Analysis. Hybrid Syst. 2016, 22, 276–283. [Google Scholar] [CrossRef]
- Muthana, T.A.; Mohamed, Z. Sliding Mode Control of Chaos in a Single Machine Connected to an Infinite Bus Power System. Math. Probl. Eng. 2018, 2018, 2703684. [Google Scholar]
- Wang, C.C.; Yau, H.T. Nonlinear dynamic analysis and sliding mode control for a gyroscope system. Nonlinear Dynam. 2011, 66, 53–65. [Google Scholar] [CrossRef]
- Vaidyanathan, S. Anti-synchronization of duffing double-well chaotic oscillators via integral sliding mode control. Int. J. ChemTech Res. 2016, 9, 297–304. [Google Scholar]
- Singh, S. Single input sliding mode control for hyperchaotic Lu system with parameter uncertainty. Int. J. Dyn. Control 2016, 4, 504–514. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, S. Controlling uncertain Lü system using backstepping design. Chaos Soltions Fractals 2003, 15, 897–902. [Google Scholar]
- Njah, A.N. Tracking control and synchronization of the new hyperchaotic Liu system via backstepping techniques. Nonlinear Dynam. 2010, 61, 1–9. [Google Scholar] [CrossRef]
- Yassen, M.T. The optimal control of Chen chaotic dynamical system. Appl. Math. Comput. 2002, 131, 171–180. [Google Scholar] [CrossRef]
- Mohammad, A.; Arash, K.; Behzad, G. Control of chaos in permanent magnet synchronous motor by using optimal Lyapunov exponents placement. Phys. Lett. A 2010, 374, 4226–4230. [Google Scholar]
- Fang, J.S.; Tsai, J.S.H.; Yan, J.J.; Chiang, L.H.; Guo, S.M. Hybrid H-infinity synchronization for uncertain continuous chaotic systems based on digital redesign approach. Meas. Control 2021. [Google Scholar] [CrossRef]
- Hou, Y.Y.; Liau, B.Y.; Chen, H.C. Synchronization of Unified Chaotic Systems Using Sliding Mode Controller. Math. Probl. Eng. 2012, 2012, 632712. [Google Scholar] [CrossRef]
- Lin, C.H.; Hu, G.H.; Yan, J.J. Chaos suppression in uncertain generalized lorenz-stenflo systems via a single rippling controller with input nonlinearity. Mathematics 2020, 8, 327. [Google Scholar] [CrossRef] [Green Version]
- Giap, V.N.; Huang, S.C. Effectiveness of fuzzy sliding mode control boundary layer based on uncertainty and disturbance compensator on suspension active magnetic bearing system. Meas. Control 2020, 53, 934–942. [Google Scholar] [CrossRef] [Green Version]
- Gandikota, G.; Das, D.K. Disturbance observer–based adaptive boundary layer sliding mode controller for a type of nonlinear multiple input multiple-output system. Int. J. Robust Nonlinear Control 2019, 29, 5886–5912. [Google Scholar] [CrossRef]
- Zhang, H. An Integral Sliding Mode Control of Uncertain Chaotic Systems via Disturbance Observer. Complexity 2021, 2021, 6628116. [Google Scholar] [CrossRef]
- Karami, M.; Kazemi, A.; Vatankhah, R.; Khosravifard, A. Adaptive fractional-order backstepping sliding mode controller design for an electrostatically actuated size-dependent microplate. J. Vib. Control 2021, 27, 1353–1369. [Google Scholar] [CrossRef]
- Tuwa, R.N.; Woafo, P. Suppression of the noise-induced effects in an electrostatic micro-plate using an adaptive back-stepping sliding mode control. ISA Trans. 2018, 72, 100–109. [Google Scholar] [CrossRef]
- Kingni, S.T.; Cheukem, A.; Tuwa, P.R.N.; Chamgoué, A.C.; Pham, V.T.; Jafari, S. Synchronous reluctance motor with load vibration perturbation: Analysis, electronic implementation and adaptive backstepping sliding mode control. Iran. J. Sci. Technol. Trans. Electr. Eng. 2021, 45, 645–654. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Shu, M.; Zhang, F.; Leng, S.; Sun, X. Secure Communication of Fractional Complex Chaotic Systems Based on Fractional Difference Function Synchronization. Complexity 2019, 2019, 7242791. [Google Scholar] [CrossRef] [Green Version]
- Cuomo, K.M.; Oppenheim, A.V. Circuit implementation of synchronized chaos with applications to communications. Phys. Rev. Lett. 1993, 71, 65–68. [Google Scholar] [CrossRef]
- Chen, J.; Li, C.; Yang, X. Chaos synchronization of the distributed-order Lorenz system via active control and applications in chaotic masking. Int. J. Bifurc. Chaos 2018, 28, 1850121-882. [Google Scholar] [CrossRef]
- Lu, J.; Chen, G.; Cheng, D.; Celikovsk, S. Bridge the gap between the Lorenz system and the Chen system. Int. J. Bifurc. Chaos 2002, 12, 2917–2926. [Google Scholar] [CrossRef]
- Popov, V.M. Hyperstability of Control System; Springer: Berlin/Heidelberg, Germany, 1973. [Google Scholar]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, C.-H.; Ho, C.-W.; Hu, G.-H.; Sreeramaneni, B.; Yan, J.-J. Secure Data Transmission Based on Adaptive Chattering-Free Sliding Mode Synchronization of Unified Chaotic Systems. Mathematics 2021, 9, 2658. https://doi.org/10.3390/math9212658
Lin C-H, Ho C-W, Hu G-H, Sreeramaneni B, Yan J-J. Secure Data Transmission Based on Adaptive Chattering-Free Sliding Mode Synchronization of Unified Chaotic Systems. Mathematics. 2021; 9(21):2658. https://doi.org/10.3390/math9212658
Chicago/Turabian StyleLin, Chih-Hsueh, Chia-Wei Ho, Guo-Hsin Hu, Baswanth Sreeramaneni, and Jun-Juh Yan. 2021. "Secure Data Transmission Based on Adaptive Chattering-Free Sliding Mode Synchronization of Unified Chaotic Systems" Mathematics 9, no. 21: 2658. https://doi.org/10.3390/math9212658