1. Introduction and Motivation
Computational solid mechanics provides approximate solutions for the deformation of continuous domains subjected to changes in boundary conditions [
1,
2,
3,
4,
5,
6]. The deformation process itself is described by using “intensive quantities”—stresses and strains—and a constitutive relation between them. These quantities have a geometric nature and form continuous tensor fields. The constitutive relation between stresses and strains may vary in the degree of complexity, depending on how the intensive quantities are related to the “extensive quantities”—forces and displacements. For example, the strains can be defined as linearised or nonlinear functions of the displacement gradient, but in all cases they must be symmetric tensors in order to fulfil physical objectivity. On the other hand, stresses can be defined as distributed forces with respect to a specific domain configuration, where the known true or Cauchy stresses are defined with respect to the current/deformed configuration. Furthermore, the simultaneous fulfilment of the balance of linear and angular momenta generates the symmetry of the stress tensor. As a consequence, the differential relations representing the strains as functions of displacements and equilibrium of stresses, together with the constitutive law, form a system of equations, the approximate solution of which is sought either by discretising the underlying solution space or by discretising the operators involved.
For the first approach (discretisation of the solution space), the most prominent example is the well-known finite element method. In this method, the standard finite element formulations, which dominate commercial finite element analysis platforms, are based on a limited number of simple element geometries: triangles and quadrilaterals in 2D, and tetrahedra and hexahedra in 3D. While these are sufficient for most practical problems and make the implementation and the solution quite efficient, there are, however, situations where the use of general polyhedra as the indivisible units covering the domain can be really more advantageous. One obvious example of this kind is related to the representation of large polycrystalline microstructures or cellular assemblies, where the need to insert additional discretisation in the polyhedra may lead to computationally very expensive problems. This has led to developments of finite elements of the form of general polyhedra, including those using an arbitrary number of vertices and faces, those using generally non-convex polyhedra, and those using polyhedra with nonplanar faces [
7,
8,
9]. In parallel, such general polyhedra proved to be the driving force for the recent development of the virtual element method [
10,
11]. However, to the best of our knowledge, methods that use general polyhedral meshing tools and then employ the subsequent solvers have not become fully established to date, and they remain in the academic domain.
The second approach (discretisation of the operators) is, to a large extent, based on the discrete differential geometry and was kept under development during the last 20 years. In this method, the discrete structure of the analysed solid at a given length-scale is considered as a starting point, i.e., the discretised computational domain is defined via the finite discrete nature of the solid constitution, and can be seen as an assembly of cells of arbitrary sizes and shapes. Concrete examples of this approach put further effort in order to preserve key properties of the system in terms of important invariants, such as energy, by proper discretisation of the operators. Even though these schemes have been well figured out/formulated and tested for a wide range of physical problems involving scalar fields, only a few of them have been proven to be stable when solving solid mechanics problems involving vector fields [
12,
13,
14]. A notable approximation within this approach is the representation of the discrete system with a graph (contour) that allows rather simple formulations for the elasticity [
15], the elasto-plasticity [
16] and the elasto-plasticity involving damage [
17].
For both of the aforementioned approaches in computational solid mechanics, the mesh quality plays crucial role in numerical simulations. For example, in several methods that rely on Voronoi meshes there may appear spurious solutions, mainly due to different scales of edges and faces (presence of small edges and/or faces), see, e.g., in [
18] and references therein. Similar problems arising from mesh quality are present in several other methods, see, for example, in [
13]. A common approach utilised to overcome such difficulties is the application of re-meshing: an initial tetrahedral mesh of any quality is used to create a new one with improved quality by appropriate merging of neighbouring tetrahedra. Examples of this technique can be found, e.g., in [
19], using mesh-free methods, and in [
20] using discontinuous Galerkin methods. Such a treatment, however, is not applicable in situations where a mesh representing some physically-based structure is required, e.g., an assembly of polytopes, and possible large differences in scales need to be handled. The effect of scale differences is quite strong due to the representation of differential operators in either approach, and could be overcome by an energy-based formulation.
The main aim of this work, is the consideration of the above open questions, focusing on the derivation of an appropriate energy-based model within the field of computational solid mechanics. This model would combine a continuum geometric description for the stresses and strains in the context of nonlinear elasticity, and a discrete energy formulation for tetrahedra as well as arbitrary convex polyhedra. The paper is structured as follows. We first recall the geometric description of deformation and the continuous definition of elastic (stored, conservative) energy in
Section 2. This is subsequently used to derive a discrete energy representation in tetrahedral elements through the use of standard barycentric coordinates,
Section 3. The problem of elastic deformation is formulated as an “energy minimisation problem”, where the boundary conditions are imposed via Lagrange multipliers. The null-space method is then employed to eliminate the Lagrange multipliers,
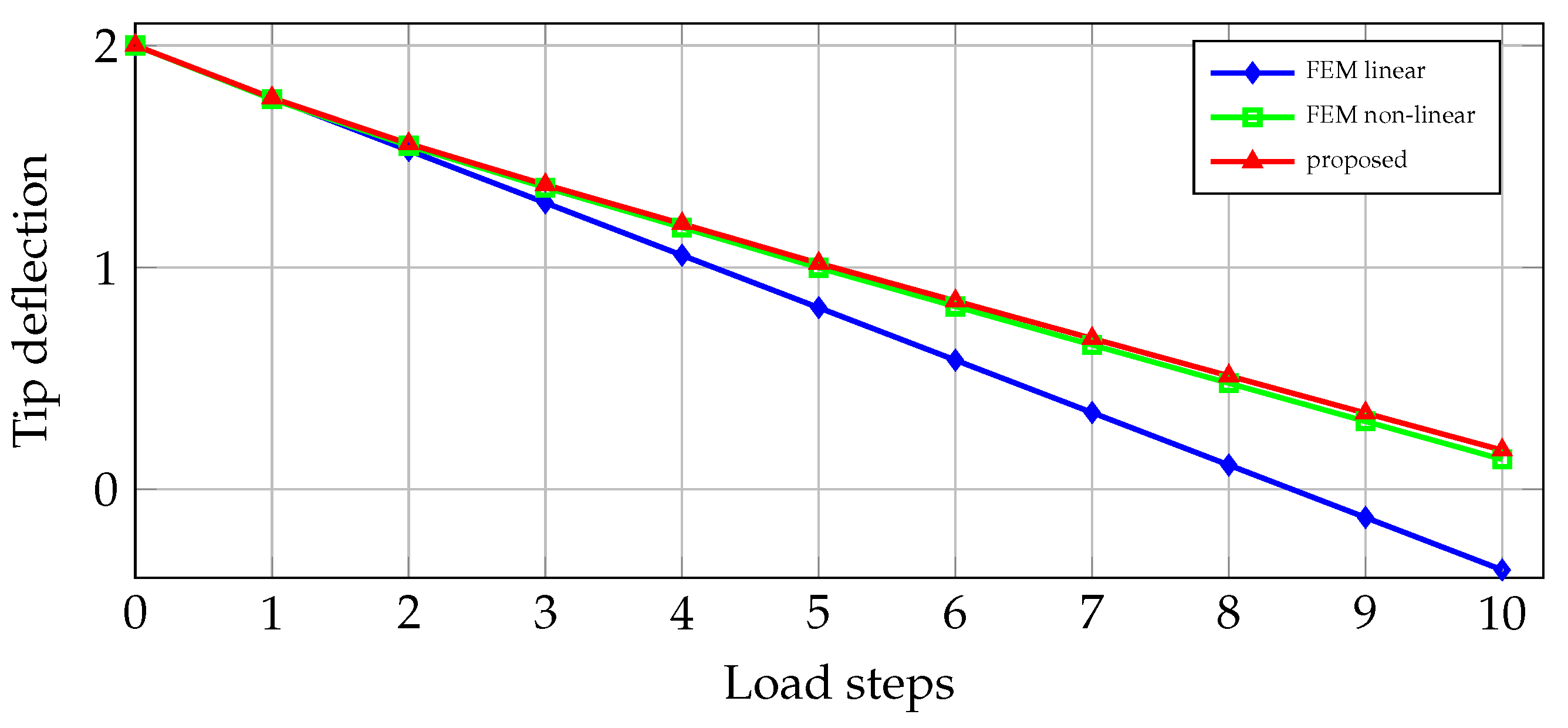
Section 4. The formulation of … and the solution procedure are validated in
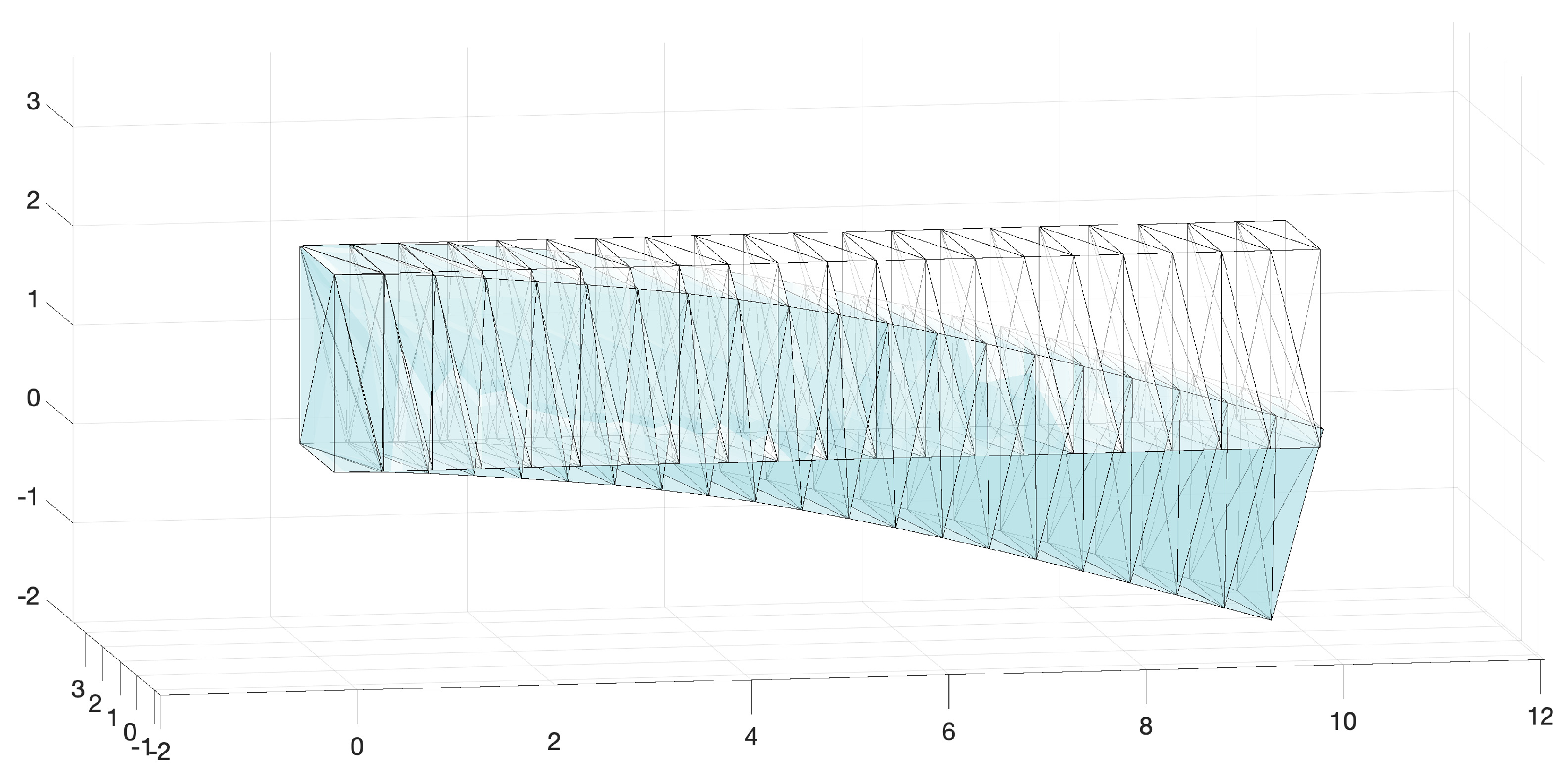
Section 5 by comparison with analytical solutions for two examples: a cantilever beam subjected to uniformly distributed load, in
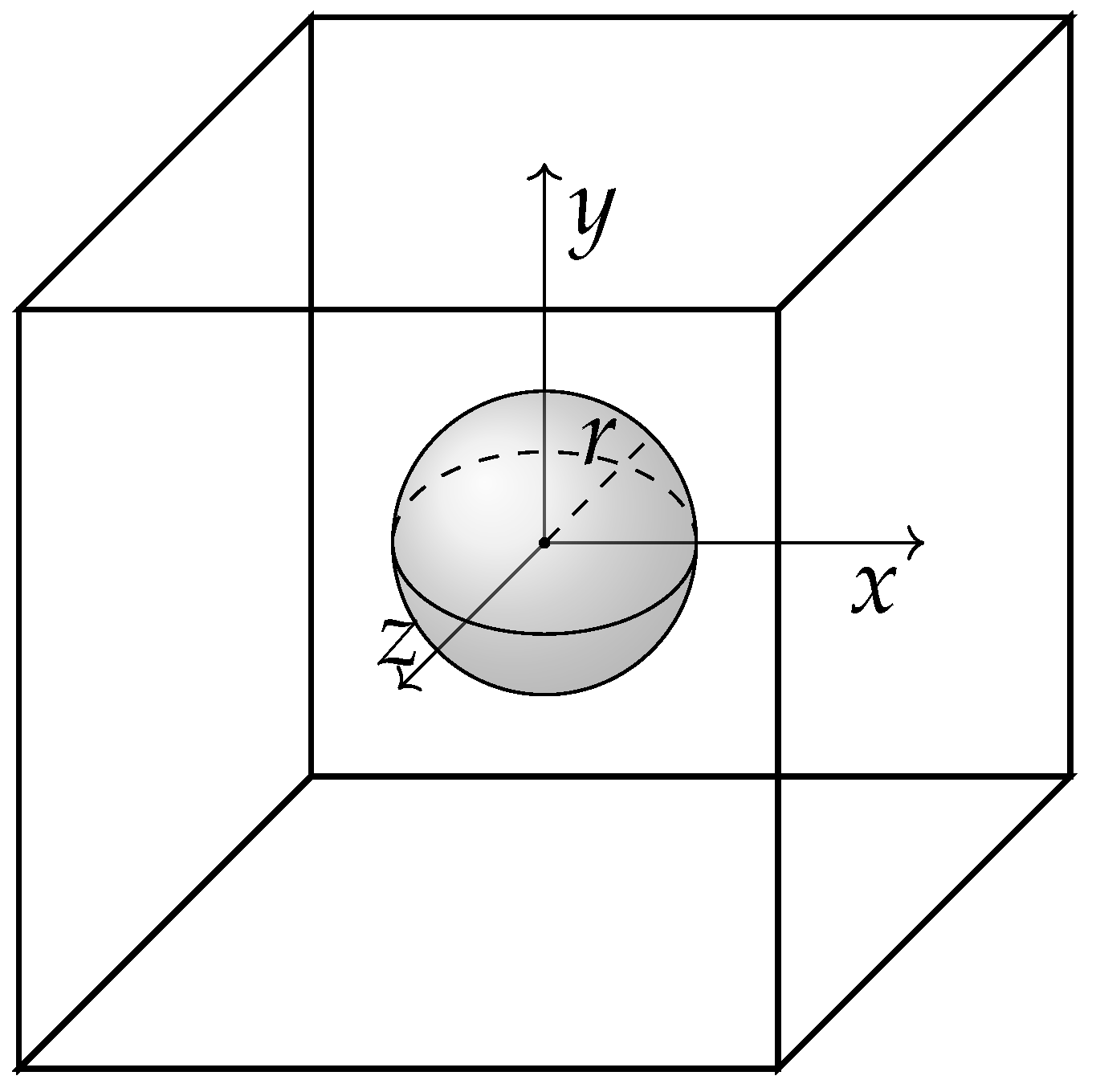
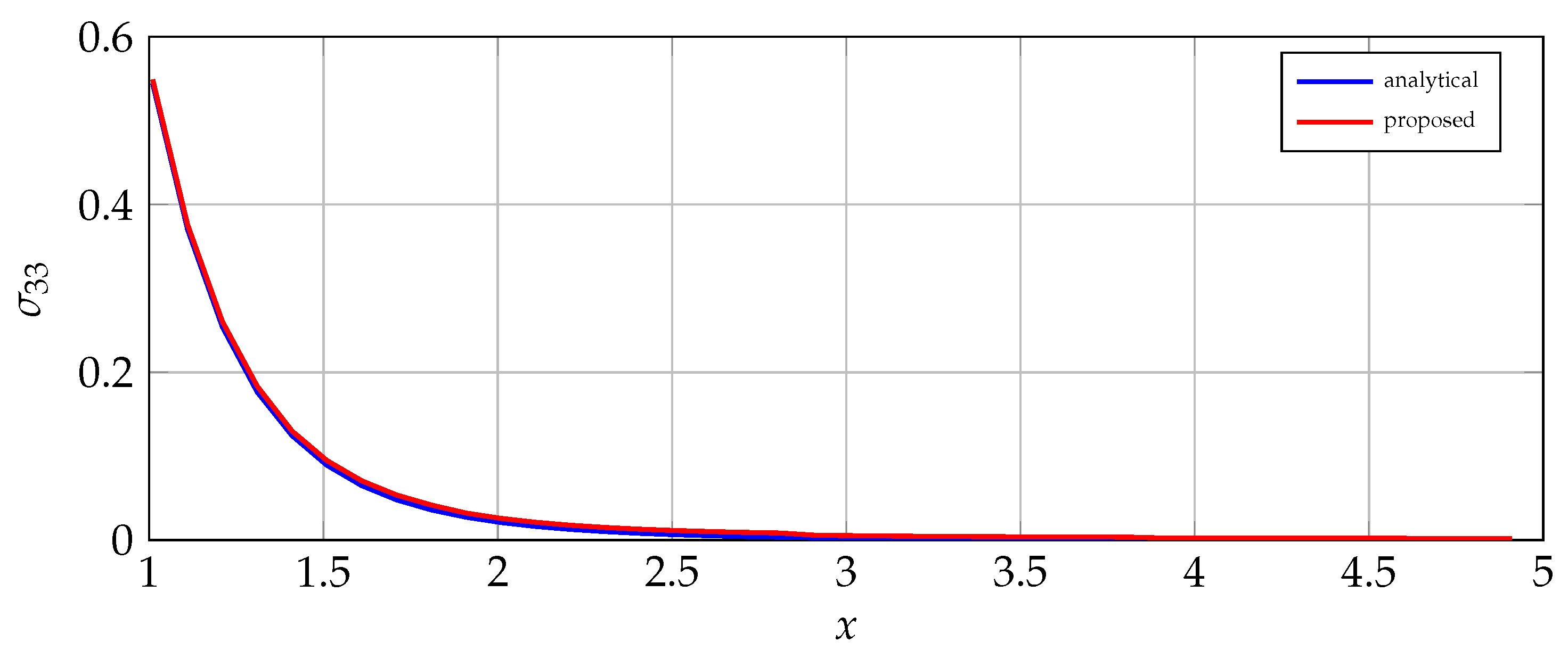
Section 5.1, and a domain with a spherical hole subjected to remote tension, in
Section 5.2. Finally, an energy model for general polytopes is proposed in
Section 6. This is achieved by extending the definition of the standard barycentric coordinates to such polytopes, deriving weighted ones, and proving that these can define an energy functional that fully describes the physical system.
2. Deformation and Energy of Conservative Solids
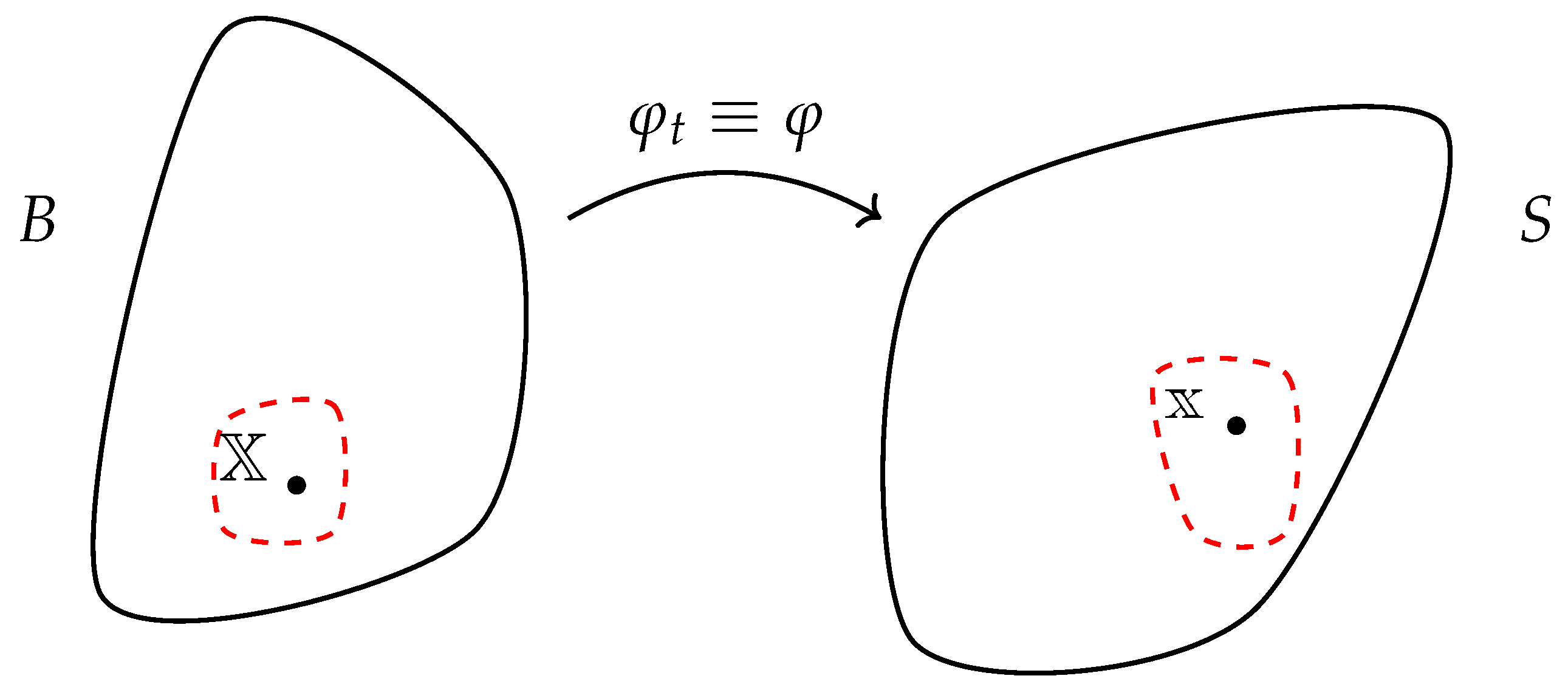
We will first review some of the basic definitions of nonlinear elasticity from a geometric perspective. We start by identifying a material body with a (smooth) Riemannian manifold
and consider a time-dependent deformation of this body to the ambient space Riemannian manifold
S described by [
1]
or, for simplicity,
see
Figure 1. The points within the body are given with their coordinates with respect to a global coordinate system:
—in the initial (reference) configuration, and
—in the current (deformed) configuration. For these we can rewrite the deformation map (
2) as
The map is considered to be a diffeomorphism, i.e., an invertible differentiable map with differentiable inverse. Manifolds and S are considered to be equipped with a metric tensor field G. This positive definite second-order tensor field is expressed by symmetric tensors in the tangent space at points of the manifold, denoted by on and on S.
A deformation (
3) can also be represented by the deformation gradient
, which is the tangent map of
, i.e., the map between the tangent space on
and the tangent space on
S [
1,
2]:
In the local coordinate charts for
and
, the components
of
are given by
The deformation gradient is a non-singular two-point tensor, i.e., maps the tangent spaces of the two configurations, with a positive determinant, denoted by
. The determinant measures the ratio between the current and initial infinitesimal volume at a given material point, and we note that the condition
represents a volume preserving deformation.
can be multiplicatively decomposed in two possible ways:
where
is a proper orthogonal rotation tensor (considering that body and space are of the same Riemannian manifold), and
and
are the so-called left (spatial, current) and right (material, reference) stretch tensors, respectively, which are symmetric positive-definite as
. This reflects the two possible representations of the motion: (1) first rotation of a reference unit triad to a current unit triad, followed by its stretching in the current configuration, and (2) stretching of a reference unit triad, followed by rotation to a current triad. The two stretch tensors have identical three positive eigenvalues—
,
, and
—representing the principal stretches of the deformation.
In this work, we will consider solids undergoing conservative deformation, i.e., where the solid stores no energy on a complete reversal of the deformation [
5]. This behaviour covers the cases of linear and nonlinear elasticity, where all work done on the system by changing boundary conditions from one (initial) to another (current) configuration is stored as an elastic energy, which is exactly equal to the energy required to restore the initial configuration by reversed change of boundary conditions.
An elastic energy formulation in terms of deformation must be invariant with respect to rigid body rotations [
1,
2,
4], thus existing formulations are based on the stretch tensors or some functions of their invariants. We will use one such formulation, which is based on invariants of the so-called left Cauchy–Green strain tensor
, given by the map
or by
where
maps covectors in the cotangent bundle of
S (or
) to covectors in the cotangent bundle of
B (or
), see also in [
21,
22,
23,
24,
25]. It can be easily shown that
is objective, i.e., frame-independent, tensor.
One set of invariants of
is given by [
1,
2,
4]
which can be written in terms of the three principal stretches as
Another set of invariants, used to define a large class of non-linear elastic behaviours, is derived from (
9) as
The elastic energy density of a simple generalised Neo-Hookean material is defined in terms of the second set by [
2,
4]
where
and
are material-dependent parameters, which in the small strain approximation are known as shear and bulk moduli, respectively.
The integral of the energy density over the solid domain gives the total elastic (stored, potential) energy, which by the principle of stationary action must be minimum for the true deformation; derivation is shown in
Appendix A. This can be understood as the system storing the minimal amount of energy for the change of boundary conditions between the initial and the current configuration, or as the change of boundary conditions doing the minimal amount of work (which is equal to the stored energy) to deform the solid from the initial to the current configuration.
While the solid deformation will be formulated as an elastic energy minimisation problem in this work, using the energy density expression (
11), the stress tensor will be required for comparisons with known solutions of test problems. The (true) Cauchy stress tensor,
, is the derivative of the elastic energy density function with respect to
, which for the case of Neo–Hookean materials can be found as
where
is the Kroneckers delta.
Interesting relations between the material parameters and energy can be established via the derivatives of the energy function with respect to the invariants of
; these are shown in the
Appendix C where the formulation is specialised to linear elasticity, i.e., infinitesimal deformation approximation.
3. Discrete Energy of Tetrahedral Cells
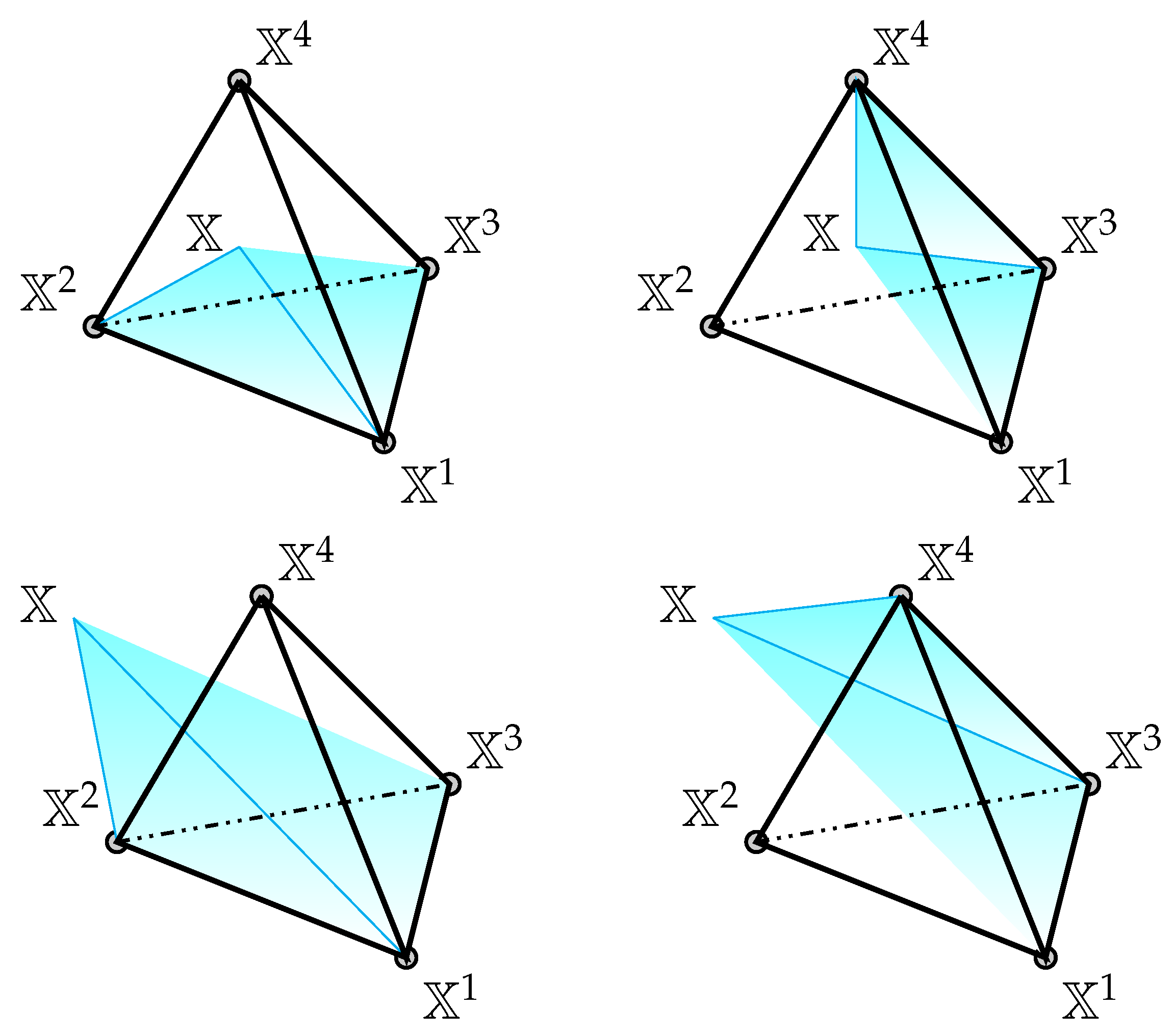
First, we consider a subdivision of the material manifold
into tetrahedra. For a given tetrahedron in
with vertices
and
, any point
induces a partition described via
where
are generalised barycentric coordinates. These are the ratios of the partitioned signed volumes
and the tetrahedral volume (
), see
Figure 2. We introduce the vector of barycentric coordinates as
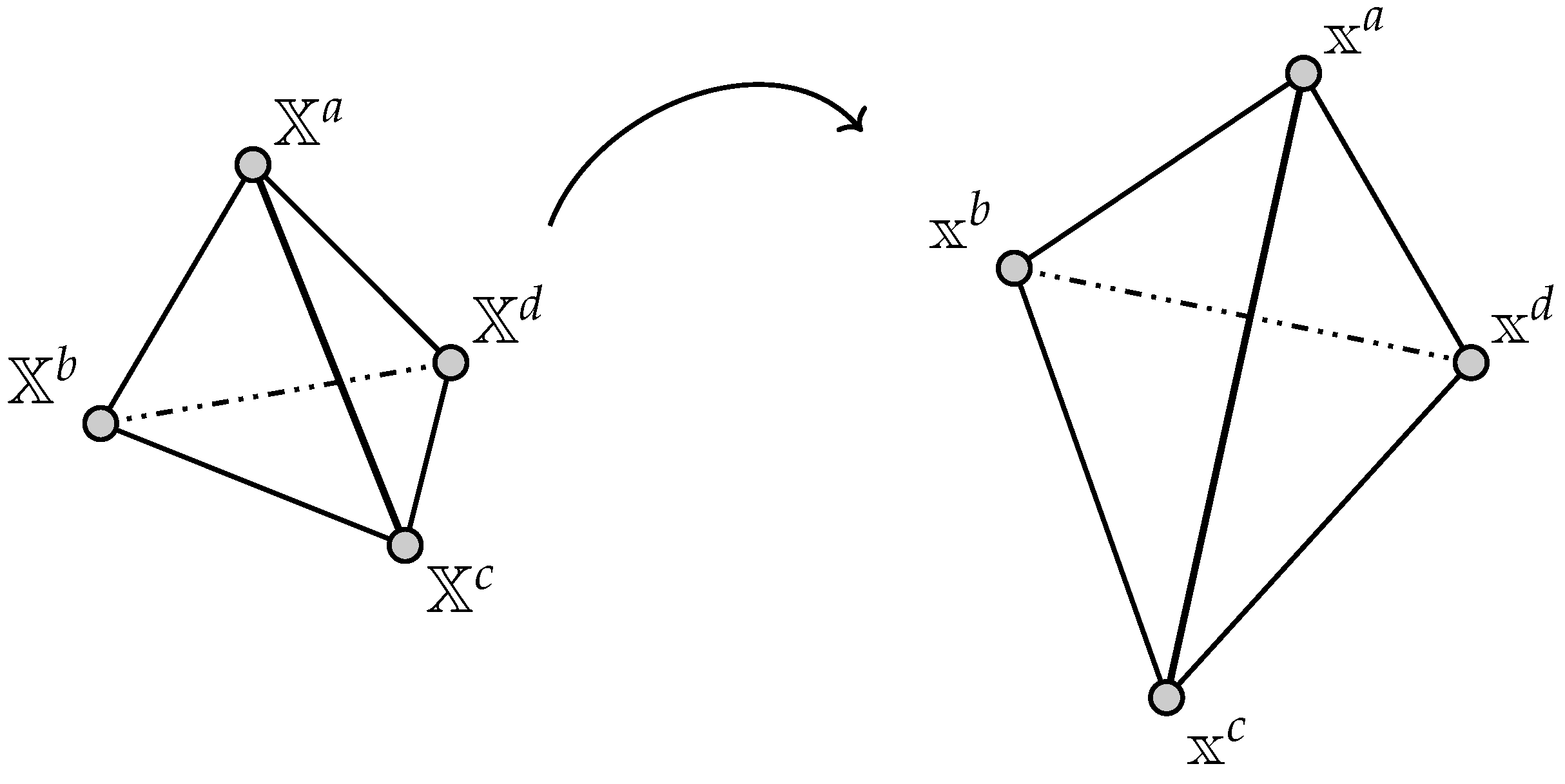
Further, we define a
matrix
describing the tetrahedron shape in the reference configuration by
where each column contains corresponding nodal coordinates in the reference system with an additional element “1”, e.g., for the first node we have
and similarly for the remaining three nodes (upper indexes here indicate vertices, see
Figure 3, and lower the
i-th component of it,
). Using this, any point
in the reference configuration can be expressed by
Similarly we define a
matrix
describing the tetrahedron shape in the deformed configuration by
Using this, any point
in the deformed configuration can be expressed by
These expressions enable us to define the map between the reference and current configuration for any tetrahedral cell (see
Figure 3) by
From another side, the physical map between the reference and the current configuration of a tetrahedron can be given by
where
are the components of a translation vector, and
is the deformation gradient which is assumed to have positive determinant.
After some algebra, it can be shown that
is the following a
block matrix:
where
is a zero vector of size three.
With the knowledge of
, the discrete energy of a tetrahedron is calculated by Equation (
11), using the invariants given in Equation (
10). The sum of energies of all tetrahedrons defines the discrete energy functional of the system.
4. Lagrange Multipliers Using Null-Space Method
When using the discrete energy functional proposed in
Section 3 the Euler–Lagrange Equation (
A4) are incomplete, and need to be complemented by prescribing Dirichlet (essential) and Neumann (natural) boundary conditions, see
Appendix B. For the proposed formulation via energy minimisation, direct application of the boundary conditions is challenging and in such cases Lagrange multipliers have been extensively used [
26]. This has been motivated by the fact that both essential and natural boundary conditions can be expressed as constraints and thus enforced by Lagrange multipliers, resulting in the following constrained Euler–Lagrange equations:
for
, where
are the constraints and
are the Lagrange multipliers.
The introduction of Lagrange multipliers increases the number of unknowns, and in order to reduce them to the number of unknown displacements in the system we use the discrete null-space method of [
26], which eliminates all Lagrange multipliers. For this, we define a null-space matrix
, which satisfies
Multiplying from the left with its transpose, Equation (
23) becomes
This leads to a number of equations equal to the number of unknown degrees of freedom. Importantly, this technique has been proven to be energy consistent, meaning that energy is neither dissipated nor gained artificially during the numerical process [
26,
27,
28,
29,
30,
31].
7. Summary and Conclusions
In this work, a geometric formulation of nonlinear elasticity, based on discrete energy functional, is presented. In the first step, discrete energy of tetrahedral elements has been formulated through a map between initial and current positions of their vertices and the use of standard barycentric coordinates. The energy functional of the resulted boundary value problem has been minimised using energy consistent technique for constrained systems, where the constraints are enforced by Lagrange multipliers and are eliminated via pre-multiplication of the discrete equations of motion by a discrete null-space matrix of the constraint gradient. Although not tested specifically here, the convergence of the proposed scheme should inherit the convergence of the well-known methods for solving constrained systems by utilising the discrete null-space method. The numerical examples presented—cantilever beam and cube with a spherical hole—demonstrate the capabilities of the approach.
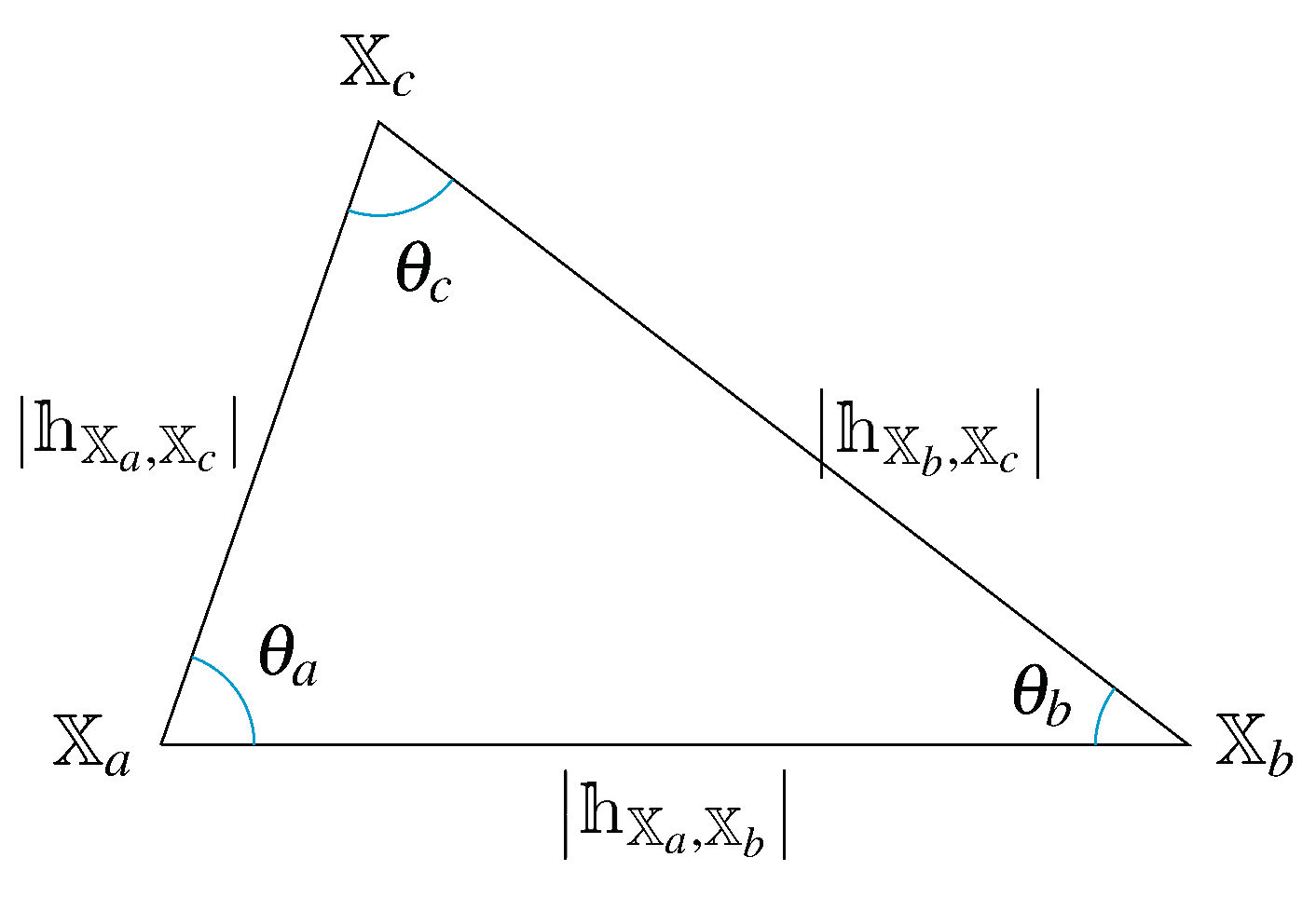
Because the use of standard barycentric coordinates is restricted to three-dimensional convex polytopes, a natural extension of the existing definitions to discrete domains consisting of arbitrary polytopes has been proposed. This opens the possibility to analyse domains with arbitrary cell shapes, including non-convex cells that posses specific microstructural features. The proposed technique is presently suited to conservative problems, i.e., linear and nonlinear elasticity, but it can be extended to dissipative systems, provided that the dissipation mechanism is given in terms of the deformations and stresses calculated in this work. Such extensions are the subject of future work.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







