
Efficient Algorithm for the Computation of the Solution to a Sparse Matrix Equation in Distributed Control Theory


Abstract
:1. Notation
2. Introduction
3. Materials and Methods
| Algorithm 1 Algorithm to efficiently compute the exact solution to (1) |
 |
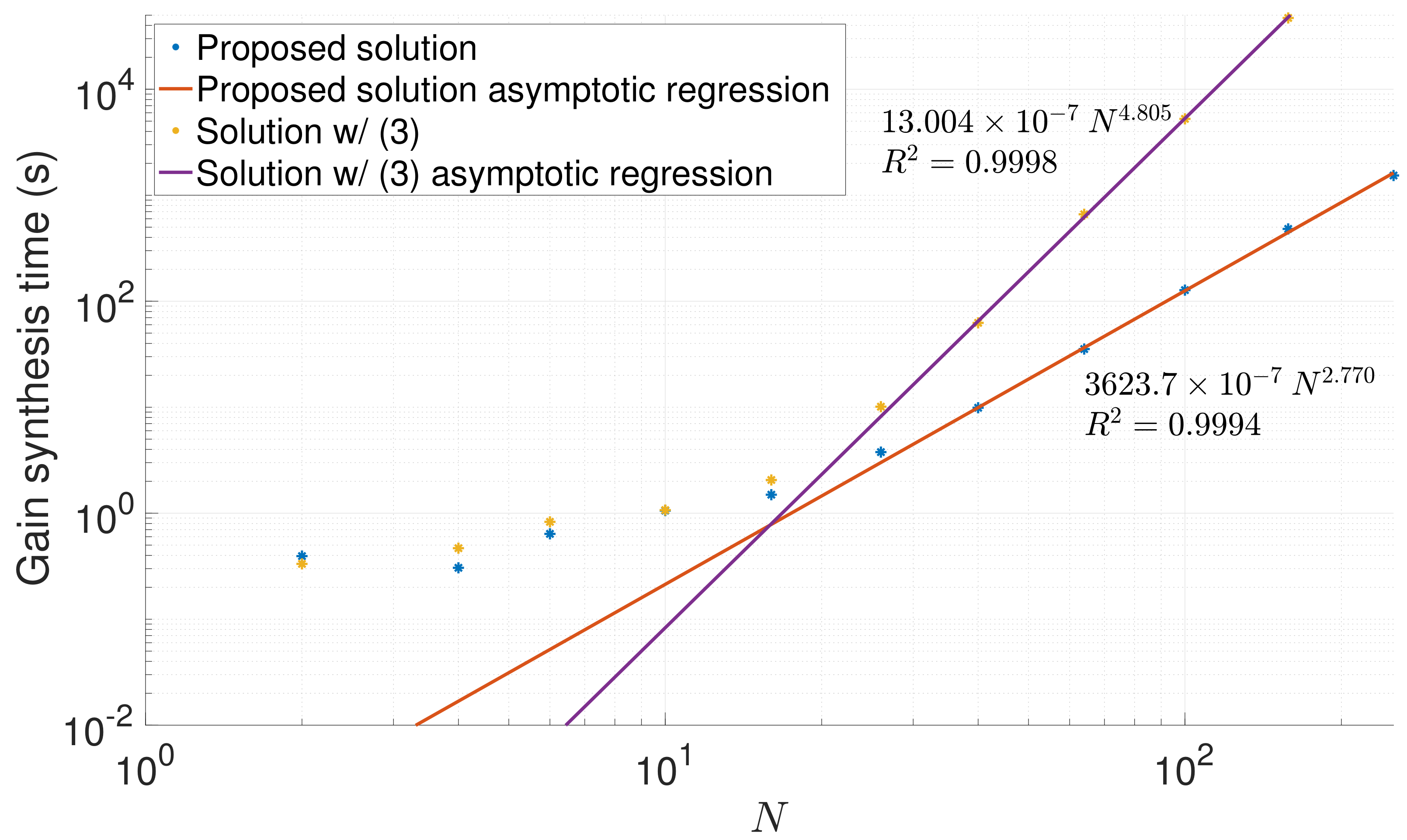
4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Duff, I.S. A survey of sparse matrix research. Proc. IEEE 1977, 65, 500–535. [Google Scholar] [CrossRef]
- Viegas, D.; Batista, P.; Oliveira, P.; Silvestre, C. Discrete-time distributed Kalman filter design for formations of autonomous vehicles. Control Eng. Pract. 2018, 75, 55–68. [Google Scholar] [CrossRef]
- Viegas, D.; Batista, P.; Oliveira, P.; Silvestre, C. Distributed controller design and performance optimization for discrete-time linear systems. Optim. Control. Appl. Methods 2020, 1–18. [Google Scholar] [CrossRef]
- Šiljak, D.D.; Zečević, A. Control of large-scale systems: Beyond decentralized feedback. Annu. Rev. Control 2005, 29, 169–179. [Google Scholar] [CrossRef]
- Conde, G.; Quijano, N.; Ocampo-Martinez, C. Modeling and control in open-channel irrigation systems: A review. Annu. Rev. Control 2021, 51, 153–171. [Google Scholar] [CrossRef]
- Cantoni, M.; Weyer, E.; Li, Y.; Ooi, S.K.; Mareels, I.; Ryan, M. Control of large-scale irrigation networks. Proc. IEEE 2007, 95, 75–91. [Google Scholar] [CrossRef]
- Chen, C.; Wang, J.; Kishore, S. A distributed direct load control approach for large-scale residential demand response. IEEE Trans. Power Syst. 2014, 29, 2219–2228. [Google Scholar] [CrossRef]
- Bumiller, G.; Lampe, L.; Hrasnica, H. Power line communication networks for large-scale control and automation systems. IEEE Commun. Mag. 2010, 48, 106–113. [Google Scholar] [CrossRef]
- Tan, T.; Bao, F.; Deng, Y.; Jin, A.; Dai, Q.; Wang, J. Cooperative deep reinforcement learning for large-scale traffic grid signal control. IEEE Trans. Cybern. 2019, 50, 2687–2700. [Google Scholar] [CrossRef]
- Keyvan-Ekbatani, M.; Yildirimoglu, M.; Geroliminis, N.; Papageorgiou, M. Multiple concentric gating traffic control in large-scale urban networks. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2141–2154. [Google Scholar] [CrossRef]
- Carlson, R.C.; Papamichail, I.; Papageorgiou, M.; Messmer, A. Optimal mainstream traffic flow control of large-scale motorway networks. Transp. Res. Part C Emerg. Technol. 2010, 18, 193–212. [Google Scholar] [CrossRef]
- Li, Y.; Yang, L.; Yang, G. Network-based coordinated motion control of large-scale transportation vehicles. IEEE/ASME Trans. Mechatron. 2007, 12, 208–215. [Google Scholar] [CrossRef]
- Vadigepalli, R.; Doyle Iii, F.J. Structural analysis of large-scale systems for distributed state estimation and control applications. Control Eng. Pract. 2003, 11, 895–905. [Google Scholar] [CrossRef]
- Buoni, J.J.; Farrell, P.A.; Ruttan, A. Algorithms for LU decomposition on a shared memory multiprocessor. Parallel Comput. 1993, 19, 925–937. [Google Scholar] [CrossRef]
- Liu, Z.; Cheung, D. Efficient parallel algorithm for dense matrix LU decomposition with pivoting on hypercubes. Comput. Math. Appl. 1997, 33, 39–50. [Google Scholar] [CrossRef] [Green Version]
- Strassen, V. Gaussian elimination is not optimal. Numer. Math. 1969, 13, 354–356. [Google Scholar] [CrossRef]
- Coppersmith, D.; Winograd, S. Matrix multiplication via arithmetic progressions. In Proceedings of the Nineteenth Annual ACM Symposium on Theory of Computing, New York, NY, USA, 25–27 May 1987; pp. 1–6. [Google Scholar]
- Pan, V. Complexity of algorithms for linear systems of equations. In Computer Algorithms for Solving Linear Algebraic Equations; Springer: Berlin/Heidelberg, Germany, 1991; pp. 27–56. [Google Scholar]
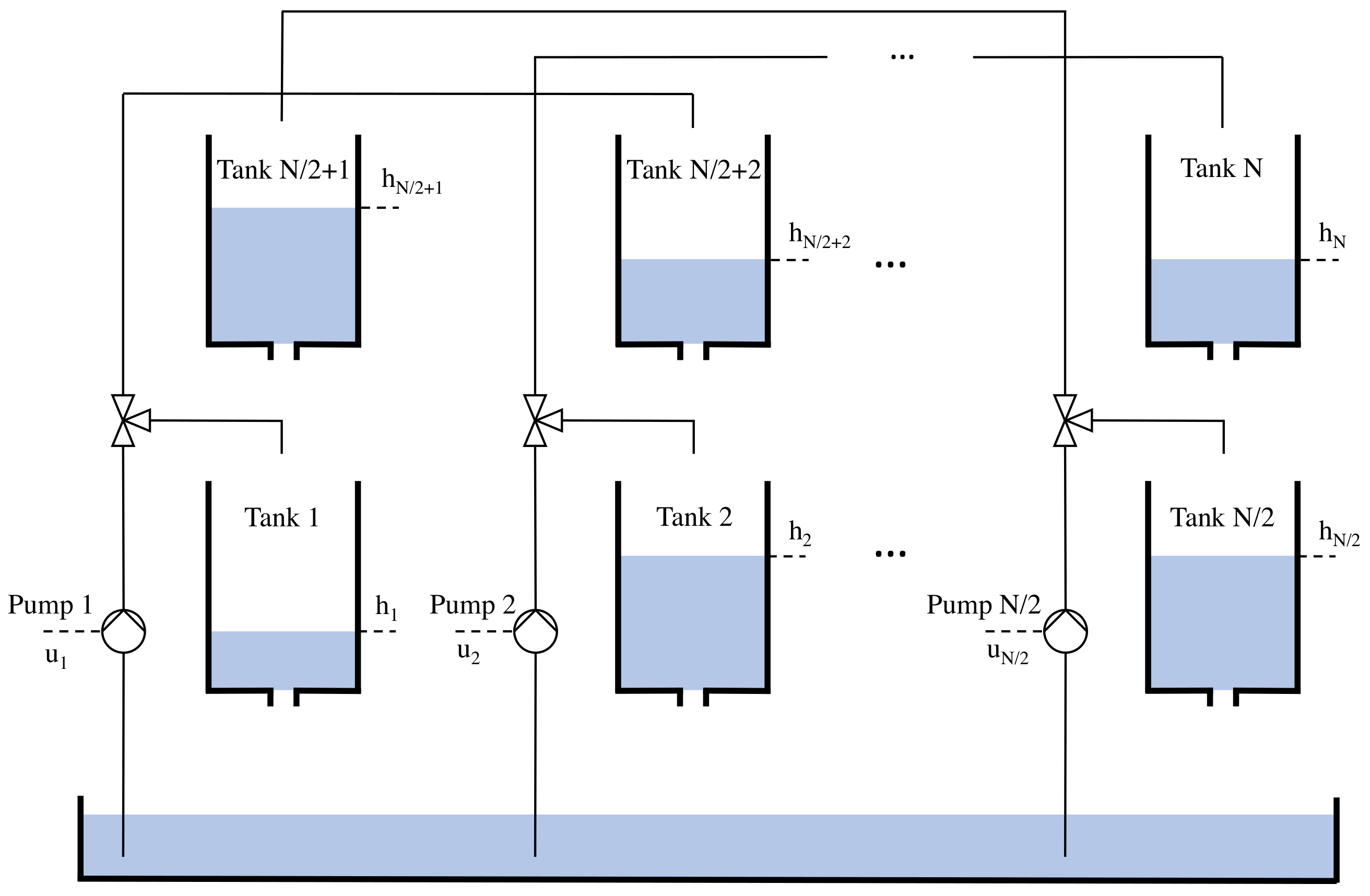
- Johansson, K.H. The quadruple-tank process: A multivariable laboratory process with an adjustable zero. IEEE Trans. Control Syst. Technol. 2000. [Google Scholar] [CrossRef] [Green Version]
- Casavola, A.; Garone, E.; Tedesco, F. A distributed multi-agent command governor strategy for the coordination of networked interconnected systems. IEEE Trans. Autom. Control 2014, 59, 2099–2112. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Constant | Value |
|---|---|
| , i odd | |
| , i even | |
| , i odd | |
| , i even | |
| , | |
| g | |
| , i odd | |
| , i even |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pedroso, L.; Batista, P. Efficient Algorithm for the Computation of the Solution to a Sparse Matrix Equation in Distributed Control Theory. Mathematics 2021, 9, 1497. https://doi.org/10.3390/math9131497
Pedroso L, Batista P. Efficient Algorithm for the Computation of the Solution to a Sparse Matrix Equation in Distributed Control Theory. Mathematics. 2021; 9(13):1497. https://doi.org/10.3390/math9131497
Chicago/Turabian StylePedroso, Leonardo, and Pedro Batista. 2021. "Efficient Algorithm for the Computation of the Solution to a Sparse Matrix Equation in Distributed Control Theory" Mathematics 9, no. 13: 1497. https://doi.org/10.3390/math9131497