1. Introduction
Artificial bipedal walkers are systems that can walk due to the alternated execution of single and double support phases of their legs. Then, the single support or swing phase is defined as the locomotion phase where only one foot is on the ground; conversely, the double support phase is described when both feet of the system is in contact with the walking surface [
1]. There exist three types of bipedal machines that can develop stable gait cycles [
2]. The first type studies the fully actuated bipedal robots that are mechatronic systems where a precise joint-angle control is required to produce bipedal locomotion. This approach has reached impressive results mainly associated with the control design of humanoid robots, for instance, the navigation and interaction of the ASIMO robot [
3], the walking on a low friction floor of the humanoid robot HRP-3 [
4], the walking on large obstacles of the humanoid robot HRP-2 [
5], among others. Nevertheless, the high-frequency response of actuators and real-time control computation cause that these robots are energetically inefficient [
6]. The second type addresses the passive bipedal walkers that can achieve stable gait cycles without any control input. Tad McGeer demonstrated in his seminal work [
7] the importance of mechanical structure in bipedal machines. His work showed that a purely passive walker can develop stable gait cycles when the system is located over an inclined surface. Despite the energetic efficiency of this type of system, they are not versatile since it is not possible to actively modify its gait indicators, such as speed or stride length; also, an inclined surface is always needed to generate the system’s movement. The third type is the bipedal robots based on passive dynamic walking, which combine the advantages of actuated robots and passive walkers; thus, this type of system considers the inertial properties provided by the robot mechanical structure to promote appropriate bipedal locomotion using simpler and energetically efficient control strategies. Relevant examples of these bipedal systems are described in [
8,
9], where in both cases, a finite-state machine based on the walking process phases was implemented for actuating the robot joints; these works demonstrated that artificial bipedal machines can reproduce human-like walking using a simple on/off control signal.
Presently, most studies about bipedal robots are mainly focused on two research trends. The first one addresses the proposal of novel control schemes. However, they are commonly implemented in robotic platforms already built. This approach produced suitable results generating stable gait cycles. For instance, in bipedal robots based on passive dynamic walking, using a nonlinear control based on tracking of the mechanical energy [
10], with a simple controller and the use of potential energy-conserving orbit [
11], with active control strategies applied to a partially actuated version of a 3D passive dynamic walker [
12], and other strategies reported in [
13] such as the use of zero moment point controllers and balance control based on foot placement. The second research trend studies the optimization-based structural design of bipedal systems, where the problem of finding the optimal structure parameters for different types of walking systems was proposed. For instance, in the design of the passive bipedal walker leg that performs limit cycles in both the frontal and sagittal planes [
14], in the design of an eight-bar mechanism to fulfill the desired locomotion task with a minimum force transmission during the stance phase [
15,
16], in the design of Stephenson III six-bar mechanism for tracking of a gait trajectory [
17] and in the optimal mass distribution for passive dynamic biped robot [
18]. Although both research trends have shown their own advantages, the trade-off between the natural dynamics of the structure and the control signal features related to the walking performance has not been addressed. Consequently, an integrated mechatronic design technique is proposed in this paper to explore the relationship between both design domains (structure and control) of bipedal robots for improving their overall performance to maintain a limit cycle dynamic response.
The highlights of considering structural and control requirements into a unified design stage were explored in [
19,
20,
21,
22,
23]. One of the first integrated design applications was published in [
19], where a unified design process obtained optimal structural and control parameters of a flexible spacecraft. The design of a high-speed flexible robot arm was developed in [
20]. In this work, the stability properties of the robotic arm were improved by simultaneously considering the mass and stiffness distributions of its links and the placement of actuators and sensors. The derivation of controllers with optimal whiplash nature that account the interactions of the structural dynamics of flexible space robots is presented in [
23] with the use of variational approach [
24]. The main benefit of that approach is that it can develop an in-plane maneuver with minimum time without residual vibration. An integrated control and structural design approach for deployable space antennas was carried out in [
21]; here, the design tasks involved the coupling among the antenna structure, deployment trajectory, and control system through solving a multi-objective optimization problem. A synergistic optimal design of a planar underactuated manipulator robot was addressed in [
22], where trajectory tracking tasks were improved through reducing mass and elastic deformations of the robot’s links, in addition, to minimize the actuation forces. In the case of bipedal robots, integrated design techniques have been applied only for fully actuated systems. A design process of a fully actuated bipedal robot that simultaneously considers its mass distribution and its controller signal was carried out in [
25]; here, a genetic algorithm (GA) was implemented to tune a neural controller and to find the appropriate mass distribution for a bipedal walker with fixed-length legs and knee joints. Similar work was proposed in [
26], where the morphology and control of a pseudo-passive bipedal robot (i.e., all joints are continuously actuated as oscillators) were coupled in the same design procedure; in this approach, also a GA was used.
On the other hand, despite the integrated design problems that gradient-based optimization techniques can address, the highly nonlinear properties of mechatronic systems propitiate that its solutions search converges towards a local optimum. Therefore, in recent years global optimization methods as meta-heuristic algorithms have been preferred for solving complex mechatronic design problems. The performance of these algorithms in searching solutions was verified in many mechatronic design cases [
27,
28,
29,
30,
31]. The simultaneous design of a gravity balanced two-link planar manipulator robot was carried out in [
27]; here, the evolution strategy
-ES was implemented with regards of obtaining its optimal structure design and the nonlinear gain PD controller parameters in the same optimization process. A concurrent design methodology for the mechatronic design of a pinion-rack continuously variable transmission was implemented in [
28]; this design problem was solved through mathematical programming and evolutionary methods, validating the global search capabilities of the evolutionary one. A robust integrated design approach was proposed in [
29]. The design of a parallel robot and its controller was addressed as a multi-objective optimization problem that minimizes the sensitivity of its design objectives with respect to uncertain parameters as end-effector payload changes; this design problem was solved using the DE algorithm. A problem of determining optimal geometric parameters and PID controller gains for a parallelogram linkage robot was exposed in [
30]. The solution to this design problem was achieved using an estimation of distribution algorithm. Lastly, an exhaustive exploitation mechanism for DE algorithm and a multi-objective structure and control design problem were presented in [
31]. This work dealt with the design of a serial-parallel manipulator where the exploitation mechanism was implemented with the aim of finding better trade-offs in the structure and control design domains.
In the works related to the simultaneous design of bipedal robots [
25,
26], two relevant design considerations are not addressed: First, the purely passive dynamic behavior of the bipedal structure was not explored with the purpose of influencing the integrated design process. Thus, by exploiting the inertial properties of the structural elements and the passive dynamic walking capacity of a bipedal robot, the overall performance for maintaining the system’s dynamic behavior into a limit cycle can be improved by proposing a control signal that is not continuously activated. Second, with respect to the structural parametrization, since previous works only studied the mass distribution of the robot links, the full physical description of the robot requires solving an additional optimization problem to obtain each structural component’s geometric and material characteristics. On the other hand, in these previous works, the proposed controllers imply a full actuation of the system because control signals are applied continuously along with the gait development.
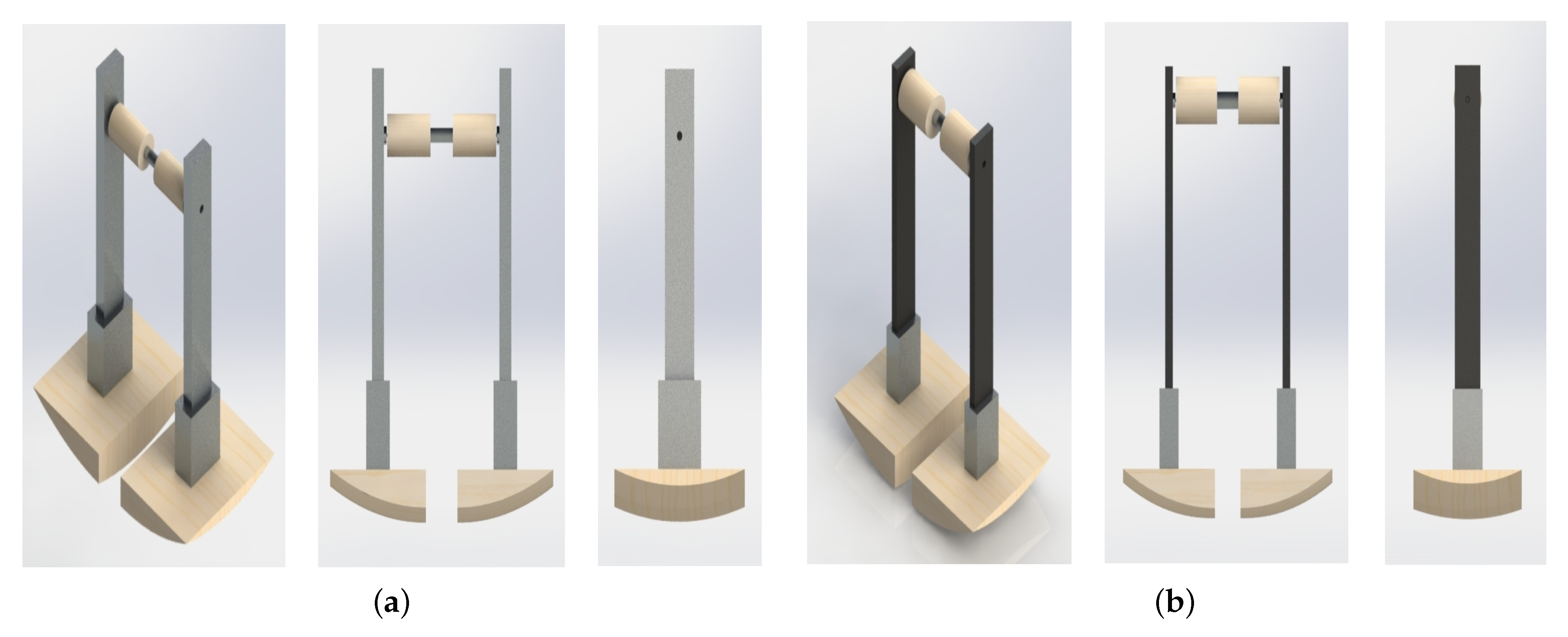
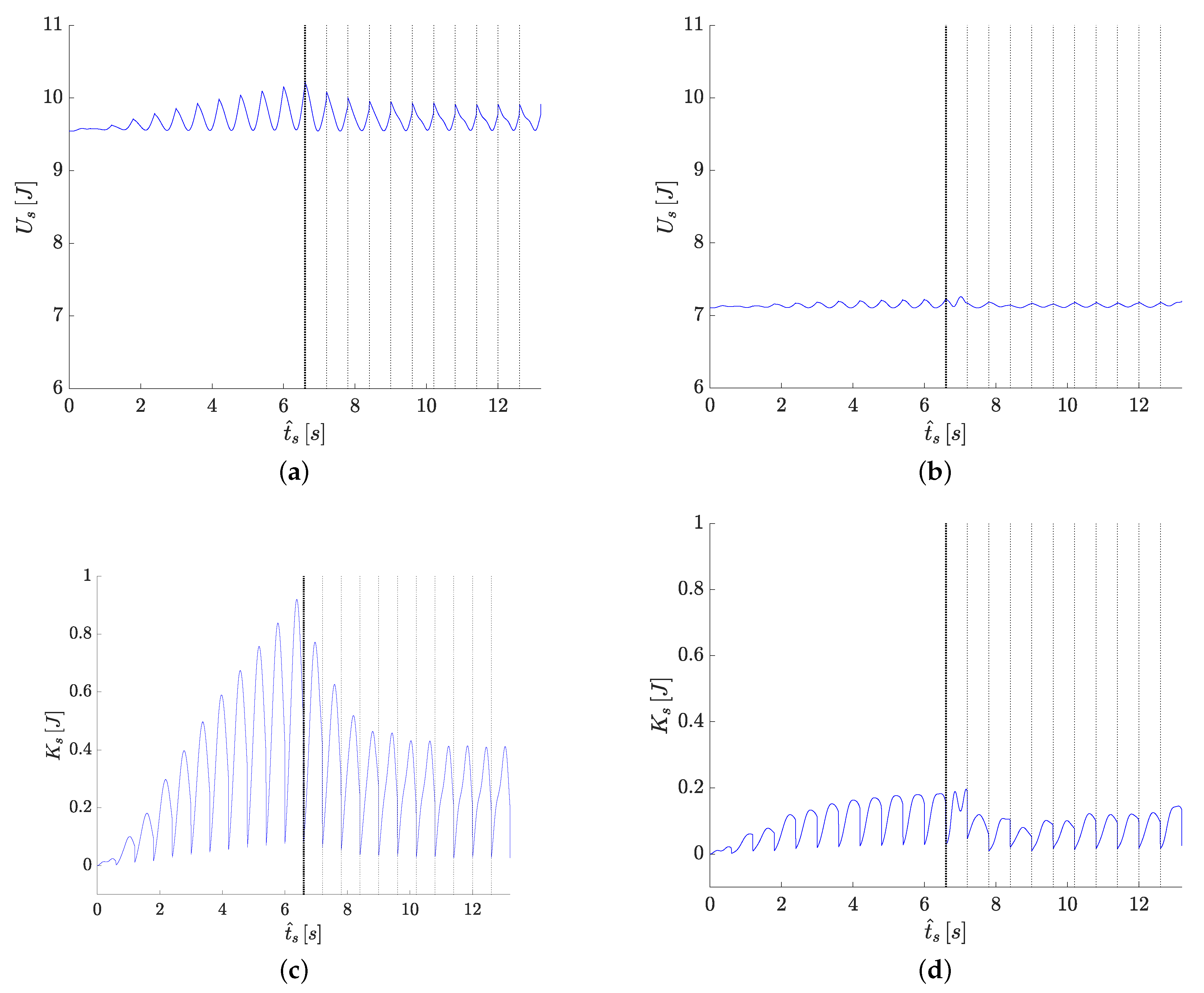
Hence, in this work, the integrated structure-control (S-C) design of a bipedal robot based on dynamic walking known as Semi-Passive Bipedal Robot (SPBR) is proposed. This approach takes advantage of the natural dynamic properties and a semi-passive control strategy to promote the convergence of the system’s dynamic behavior towards a limit cycle. The design proposal is formulated as a nonlinear discontinuous dynamic optimization problem, where the objective function is focused on achieving a periodic motion of the SPBR along with two consecutive passive (inclined ground) and semi-passive (leveled ground) walking scenarios with a minimal control effort. The considered design variables include the geometric description of each structural element, its material assignment, the control input parameters, and a set of walking conditions variables that externally modify the dynamic behavior of the SPBR. The results are validated by comparing the obtained integrated design with an SPBR derived from a sequential design process.
Due to gradient-based optimization techniques cannot efficiently handle system discontinuities, the meta-heuristic optimization method is implemented. Based on the successful use of the DE algorithm in solving integrated design problems of mechatronic systems such as in pinion-rack continuously variable transmissions [
28], in five-bar parallel robots [
32,
33] and in digital displacement machine [
34], the variant DE/rand/1/bin [
35] with a constraint handling mechanism [
36] is applied in the proposal with the aim of guiding the solution search towards the feasible design region. Furthermore, because the material assignment of structural elements is related to a finite set of available materials, a discrete variable handling is incorporated into the DE algorithm [
37].
The rest of the paper is organized as follows: The dynamic model of the SPBR and the semi-passive control strategy are presented in
Section 2. The formulation of the integrated S-C design problem is established in
Section 3, where the objective function, design vector, and constraints are described. The results and a comparative analysis between the proposal and a sequential design process are presented in
Section 4. Lastly, the conclusions are drawn in
Section 5. The descriptions of all the used symbols in this article can be seen in
Appendix A.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









