1. Introduction
The Ordinary Differential Equations (ODEs) with discontinuous right-hand side are one of the common frontiers between Mathematics and Engineering. Several phenomena in mechanical, control systems and particularly in power electronics are the main sources of motivation of this study. Power electronics is an area of electrical engineering in enormous expansions; it studies and develops many circuit configurations used for the conversion of energy from electrical to electrical [
1]. The aim is to modify the energy parameters, for example, converting a constant voltage of 4000 V available on a catenary of a railway into a sinusoidal voltage on a train or converting the sinusoidal voltage available in our houses in constant voltage to charge the batteries of our smartphones or to supply domestic devices. The apparatuses that realize this conversion (called “power electronic Converters”) can convert in general all the forms of electrical energy (alternating, continuous, periodic) into a form of electrical energy with desired and adjustable voltage and frequency values. These converters are widely used in every industrial field, in transport, in home automation and in electricity distribution systems. The converters are made by serial and/or parallel connection of various power semiconductor components, called “switches”, because they are used exactly as switches, i.e., only in “ON” or “OFF” state. Caused by this periodic switching action, the differential equations representing the power electronic converters are characterized by a sudden change. In other words, they are generally described by nonlinear ODE’s system (
switched model) discontinuous right-hand side, (i.e., depending on a T-periodic function with “time discontinuity” and “state discontinuity”) under periodic forcing, and then the existence and the uniqueness of the solution cannot be found with usual methods. It is known that the averaging method is a powerful technique used for the analysis of the nonlinear differential systems. They have a long history starting by the works of Lagrange and successively by the works of Jacobi and Poincaré regarding the perturbation theory. The first results regarding the feasibility of the averaging approach were fixed by Fatou [
2] in 1928. In years 1930–1960, other proofs were provided by Mandelstam and Papalexi [
3].
Later, other authors have used the averaging method for different applications sometimes justifying the goodness of the method and introducing further theoretical developments of the same. A relevant role has been represented by some monographies regarding nonlinearity in oscillations by Krylov, Bogoliubov and Mitropolsky [
4,
5].
Further developments related to averaging approximation have framed the approach among asymptotic methods for nonlinear differential equations [
6,
7]. Perko [
8] has extended the validity of the method introducing higher order averaging for perturbed periodic and quasi-periodic systems. Banfi [
9], Graffi [
10] and Eckhaus [
11] have deduced improved results for periodic systems and have shown higher approximations, using the concept of local averaging. Further developments of this method are presented in [
12,
13,
14,
15,
16,
17,
18,
19] and they are related to the extension of the method to partial differential equations, slow dynamic systems, nonlinear resonance and optimal control problems. The averaging theory has been used also in discontinuous and in piecewise-smooth dynamical systems: in [
20], some existence sufficient conditions for some m–piecewise discontinuous polynomial differential equations are provided; in [
21,
22], some bifurcation problems for a class of discontinuities of piecewise-linear differential systems have been analyzed; Ref [
23] has developed a detailed analysis of the problem of non-smooth dynamical systems; Ref [
24] has treated a deep analysis of nonlinear dynamics and chaos. Recently the method has been used also for Meta-Analysis of binary data [
25], in comparison with Expansion Perturbation Method in the problem of Weakly Nonlinear Vibrations [
26] and for Glacial Cycles with Diffusive Heat Transport [
27]. Prevalently, these references contain cases drawn from mechanics and control.
In the field of power electronics, Krein, Lehman et al. developed two milestone works analyzing discontinuities regarding the state and introducing the Averaging Theory as a rigorous structure for evaluating, refining and extending the empirical averaged approaches earlier formulated and adopted in power electronics [
28,
29].
Unfortunately, no considerations have been developed yet regarding the existence and the uniqueness of a global solution for the class of the nonlinear systems such as the power electronic converters. Moreover, some important questions are still open: what is the difference in norm presented by the approximation given by integral of the averaged model respect to the effective solution? What is the right neighborhood of zero to which the period T has to be long to be sure that the error presented by the solution of the averaging model is minor compared to an assigned value? These questions are fundamental for improving control and dynamic response of power electronic converters. In this paper, the authors try to answer these questions.
2. Problem Formulation and Existence and Uniqueness of ODE-Solution
Let
. Let K be a positive constant such that, for each
,
. Given
, we consider the following initial value problem:
Setting
, the discontinuity of
F(
x,
t,
T) does not allow us to apply the global existence theorems present in ODE’s theory (see, for example, [
30]) to the problem (1) and (2). Since
F(
x,
t,
T) is measurable in
and locally bounded, there exist, as we will see, global solutions in the Filippov sense [
31]. We recall that a function
, where J is an interval included in
, is a solution of (1) and (2) in the Filippov sense if it is absolutely continuous in every bounded interval included in J and, for any
, there exists a set
having zero measure according to Lebesgue such that:
where
is the intersection of all the closed and convex sets containing
Let . The continuity of in the point x(t) assures that there exists . This implies that . Consequently .
Theorem 1. The problem (1) and (2) has at least one global solutionaccording to Filippov.
Proof. From a local existence Theorem ([
31], Theorem 4, page 212) there exist
and a solution
of (1), (2) in the Filippov sense defined in
. Let
be the maximal interval of
, then
is absolutely continuous in every bounded interval included in
and it results in:
Let us verify that
. Reasoning by contradiction, let us suppose that
and let us note that:
Since from (5)
, (6) implies that:
and consequently, since
, by using Gronwall’s Lemma we have:
From (7) and (8) we get that and then .
Then, is absolutely continuous in and it can be extended to the right of by virtue of the local existence theorem of Filippov. The conclusion contradicts the maximality of , therefore, it has to be . □
Remark 1. Let us ignore the uniqueness of the solution.
The Filippov uniqueness theorem ([31], theor.10, page 218) cannot be used in the case of the problem (1) and (2). The purpose of this article is to approximate uniformly on each bounded interval included in
through the global solution of a Cauchy problem connected to a suitable autonomous system. To this purpose, it is necessary to bypass the barrier represented by the differential inclusion (3). To this aim, we will make an assumption on
, which is justified by the physical meaning that
assumes in Power electronic field. Actually, under a suitable choice of
, physical considerations and experimental proofs imply the uniqueness of
and that the set
has not finite accumulation point (this is the no-chattering property).
Since for any
is continuous in the point
, from (4) the differential inclusion (3) becomes
from which
, because
is absolutely continuous in each bounded interval included in
.
Therefore, by the physical point of view, the following assumption is reasonable:
Assumption 1. There exists only a functionabsolutely continuous insuch that: Remark 2. Independently from the physical analysis, the Assumption 1 is fulfilled when the functionsare constants. Let us investigate, for simplicity, the case. For m = 0, 1, … letsuch that. Let. Let us note that for,, (9) holds even if we replace by some global solution. Moreover:
Then, if is an arbitrary global solution, it results in , from which . Similarly, , etc.
3. Approximation via Averaging-Theory
In this section, we suppose that the Assumption 1 is true. In addition to the system (1), we consider the “average” system
where
is defined by
Proposition 1. Given, there exists only one functionsuch that Proof. Since
G is locally Lipschitz in
and then, from a well-known theorem, there exist
and an unique function
that fulfils (11). Let
be the maximal interval of y. By using (12), we get:
and consequently by virtue of Gronwall’s lemma:
However, this result is excluded by the maximality of then . □
Setting , we make some useful prefaces in order to give a suitable estimate of the upper boundary of .
From (10) and (11) we get:
and similarly for y(t), with y
0 instead of x
0.
We suppose that
and we denote by
S the closed ball of
with center in the origin and radius
Then,
; furthermore, setting M > 0 such that
, it results in
The following proposition is very useful and easy to verify.
Proposition 2. If c is a constant with,
then Theorem 2. Under the assumption (13), we get: ([32], Theorem # 1, relationship (50) page 9371)
where
.
From the Theorem 2, when we deduce the following remarks:
Setting
, assuming in (16)
and setting
where
, we get:
then
The result (20) can be also obtained from a theorem of Lehman and Bass ([
29], Theorem 2). The most relevant fact is that, differently from [
29], the relations (18) and (19) allow us to give a numerical estimate of
and then to know the values of T for which the inequality present in (19) holds.
For each T > 0, it is easy to verify that the equation with the unknown variable
has the unique solution
where
.
If we choose
as in (22), relations (18) and (21) imply that
and consequently from (19)
We remark that the function
is strictly increasing in
and we have
It is very important that, with , from (23), it is possible to give a numerical estimation of the error that can be made by replacing and that this error approaches zero when the period T is decreasing according to a well specific law.
The principal outcomes of Theorem 1 are the relations (18) and (22).
These results are very relevant for the analysis and the control design of a power electronic converter (PEC) by means of the State Space Averaged and represent an answer to the two questions formulated at the end of the Introduction of this paper.
4. Numerical and Experimental Results for a Largely Used Power Electronic Converter Topology and Discussion
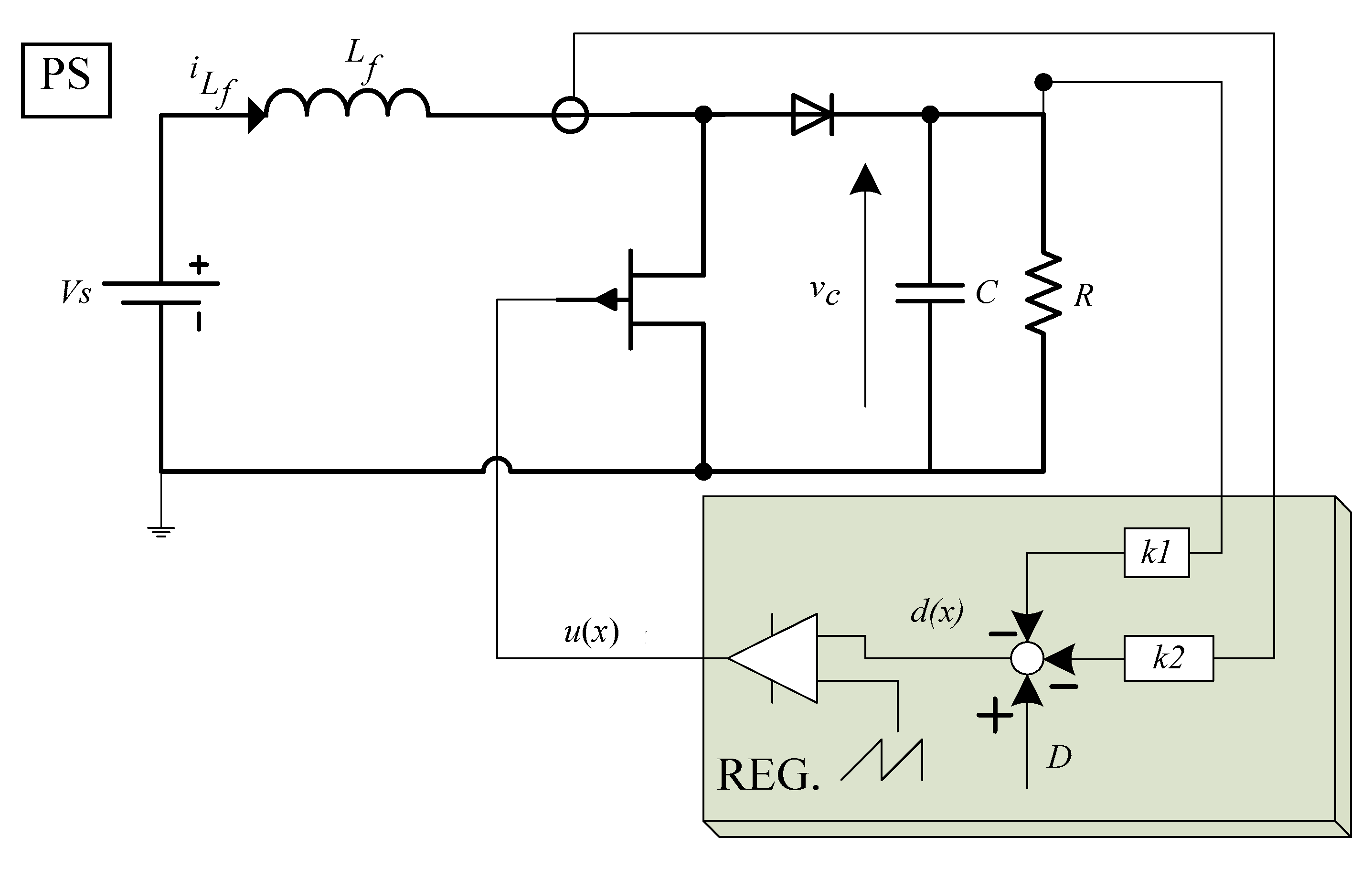
The theoretical results obtained in the previous sections find wide and relevant applications in the field of power electronics. In order to show their relevance for this branch of engineering, in the following, they are applied to a converter topology widely used in various engineering sectors, by electric vehicles and in general of sustainable mobility field to the renewable energy field: the boost converter. It is a PEC characterized by a system of ODE of the second order discontinuous right-hand side which, powered by a constant voltage vs. at the input, provides at the output a constant voltage v
c, whose value is theoretically adjustable within the set [V
s, +
[. The electrical circuit of a boost converter with the associated system control is shown in
Figure 1.
It consists of two blocks: the Power Stage (PS) block and the Regulator (Reg) block. The PS block is made up of a battery Vs, an inductor Lf, a capacitor C, a controlled component M and a diode D. It is a part dedicated to converting electrical energy at voltage vs. into electrical energy at voltage vc.
The “Reg” block of the controller measures the state variables (the current in the inductor Lf and the voltage across the capacitor C) and calculates the duty ratio d(x) necessary so that the output voltage vc goes from the actual value to the desired one within the range [Vs, +[.
It implements the following relation:
The duty ratio represents the average value, calculated on each period T
s, of the u(x) signal to be applied to the controlled component at each switching period T
s. The signal u can take values only in the discrete set
. It is 1 when the component is switched to conduction, and zero when the component is opened. The “PWM” block of the controller is deputed to transform the duty ratio d(x) in the signal u(x). It implements the following relation:
where
H represents the Heaviside function.
The differential system of equations representing a boost converter is the following:
with:
In order to provide an application of relation (18), the operation of the boost converter having the parameters reported in
Table 1 with different switching periods was simulated.
The error in the desired norm was set at 0.3. The application of the relation (18) has given a period
as the maximum period that verifies the desired error. The circuit of
Figure 1 was simulated with the switching periods shown in
Table 2. In this table, it is noted that, for switching periods belonging to the interval set by (18), i.e., ]0, T
η[, the error is lower than the desired one, as envisaged by the relation (18), while for periods not belonging to this range, the error is greater. In
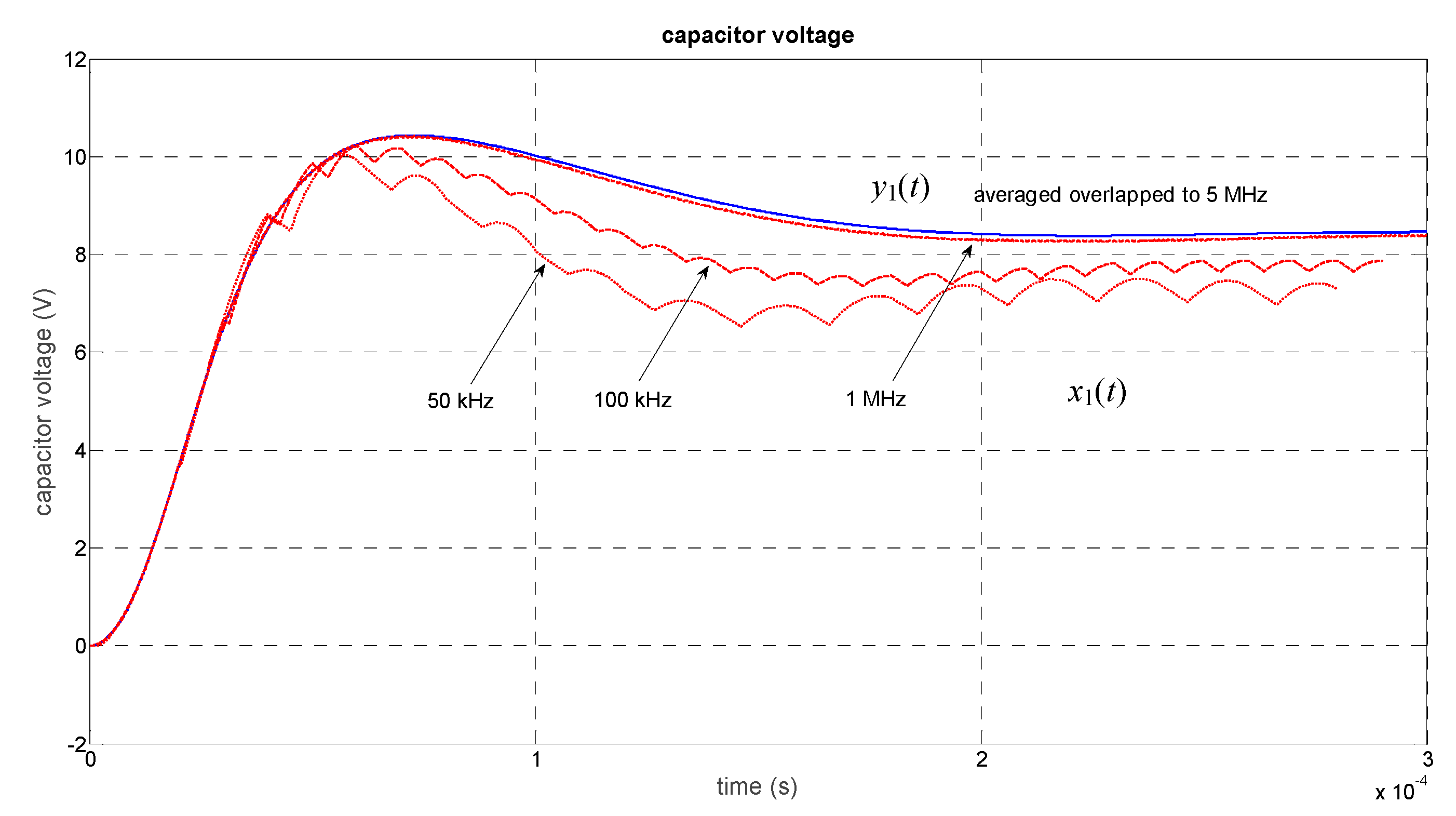
Figure 2, a numerical validation of (22) is shown. The different curves show the trend of the output voltage for different switching periods. As can be seen from
Figure 2, as the switching period decreases (or if it is equivalent to the increase in the switching frequency) the trend of the integral curve of x
T tends to approach the trend of the integral curve of y (the top waveform in
Figure 2), showing the uniform convergence of the x
T versus y.
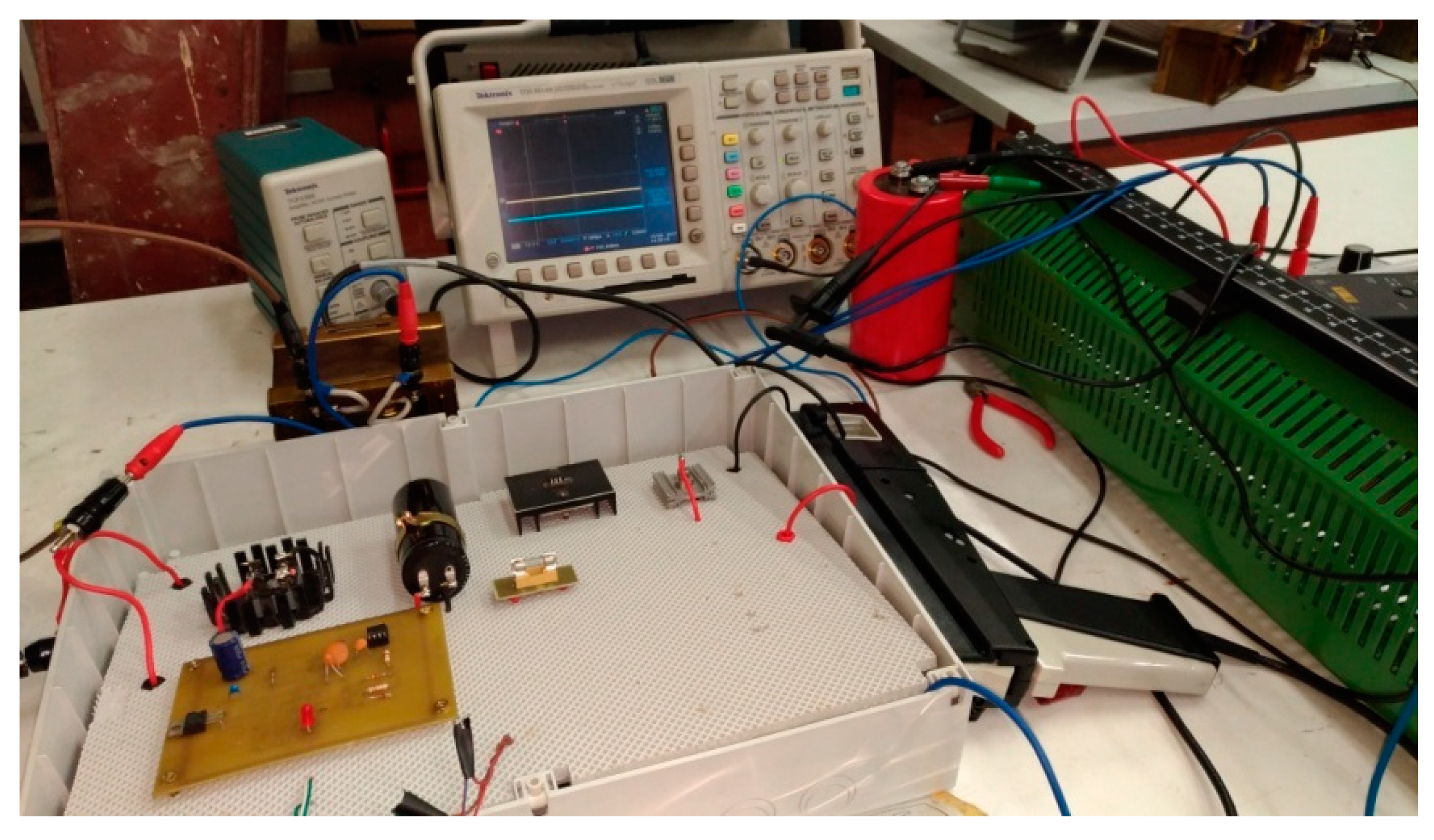
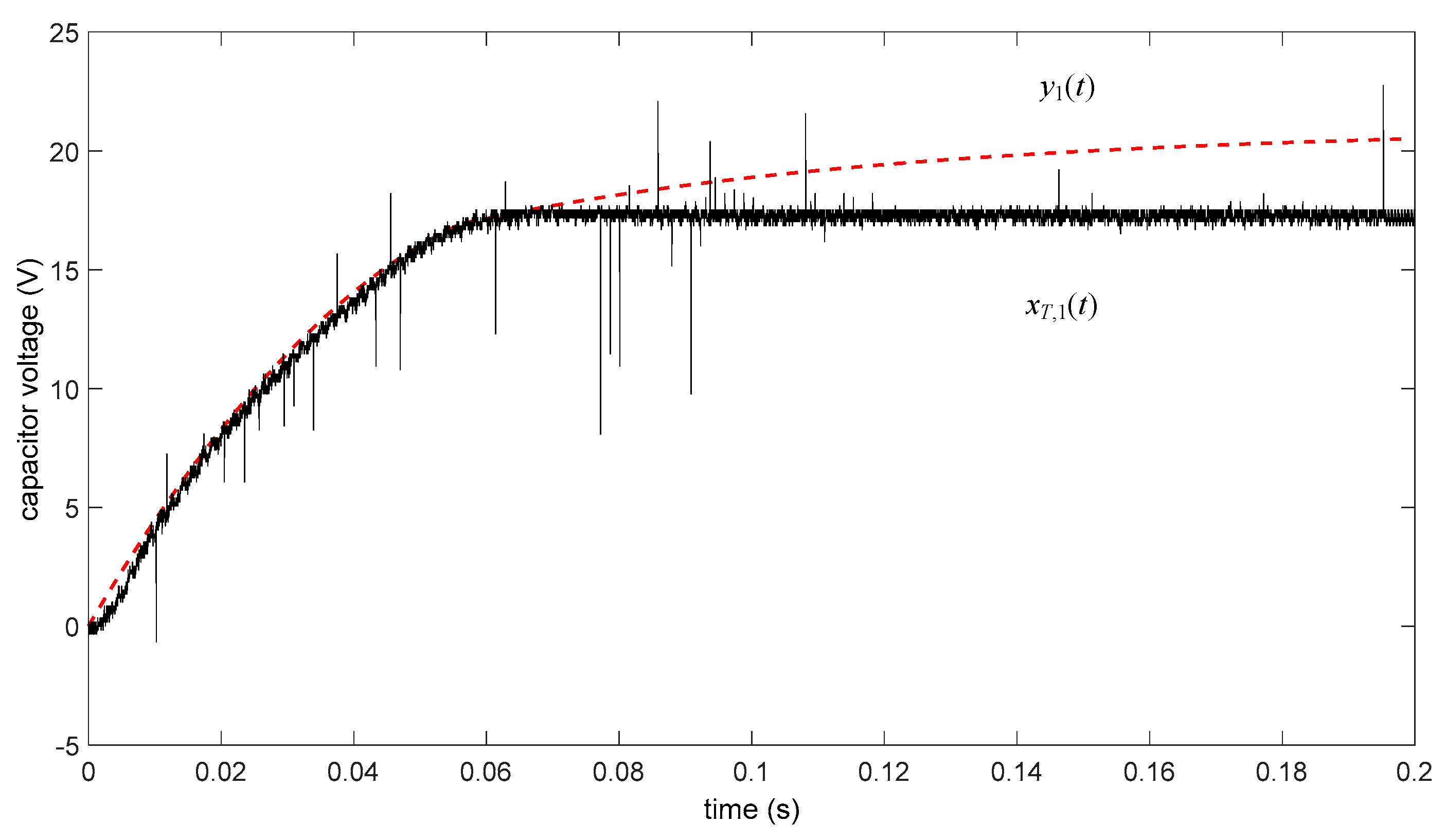
Similar results were obtained on a laboratory-made prototype of a boost converter, as shown in
Figure 3.
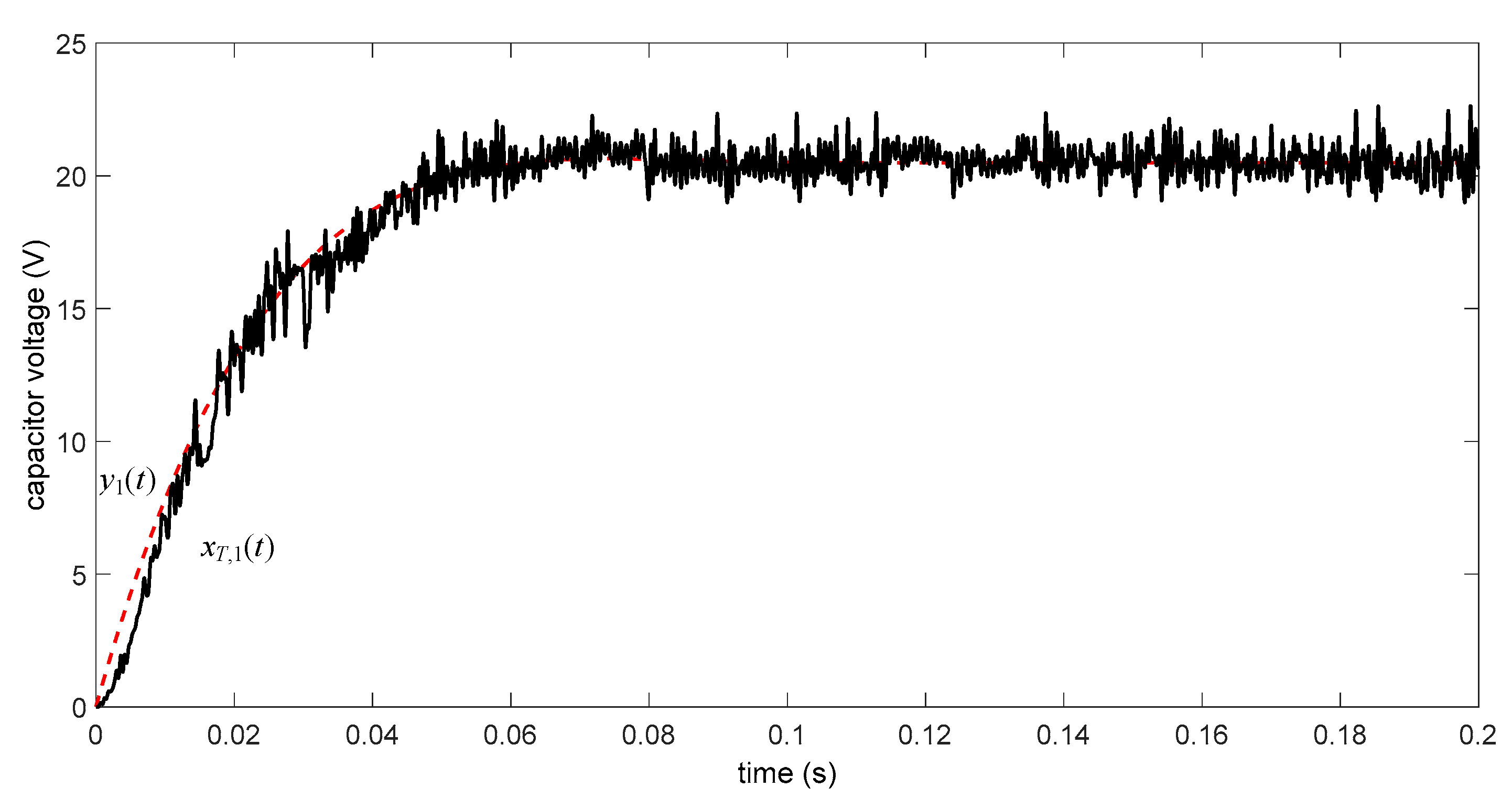
A desired error in the norm of 0.8 was set and, from the relation (18), we obtained T
η = 70
. The converter was made to work with two different switching periods, T
1 = 60
and T
2 = 1.52 ms. The results reported in
Figure 4 and
Figure 5 were obtained. As can be seen from the figures, working with the switching period T
1 lower than T
η (
Figure 4), the two solutions overlap, while in the case of
Figure 5, the waveforms move away presenting an error greater than the desired one.
The physical explanation of these trends represented mathematically by the relations (18) and (22) is evident: the averaged method provides information on the time evolution of the moving average of the components of the state vector, not on the evolution of the instantaneous values of these components. Therefore, the larger the evolution time constants of the state vector components are, compared to the switching period, the more the quantities vary little, within the switching period between the beginning and the end of the period and, therefore, the better the moving average of the quantities approximates the instantaneous values in each period. This explains why, by increasing the frequency, i.e., reducing the period, the actual waveforms tend to the averaged model. This also explains why, by increasing the switching period, the standard error between the solution of the actual model and the one of the averaged model increases.
The advantages of this method compared to other ones present in the literature are different: it is a simple method to apply, it provides the possibility of formulating simple control algorithms, and it leads, in the case of open loop controls, to a system of ordinary differential equations that can be resolved also analytically in some converters.
Compared to the latest results obtained on the subject [
28,
29], which demonstrated only a uniform convergence of y(t) to x
T(t) as the switching period tends to zero, first of all, this work provides a proof of existence and uniqueness in the sense of Filippov to the problem of determining the temporal evolution of the quantities of a converter and it also provides formulas for calculating the error that is committed in using the approximate solution found with the averaged method instead of the exact one.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}