
A Novel Analysis of the Smooth Curve with Constant Width Based on a Time Delay System


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries and a Hypothesis
3. The Proof of the Hypothesis
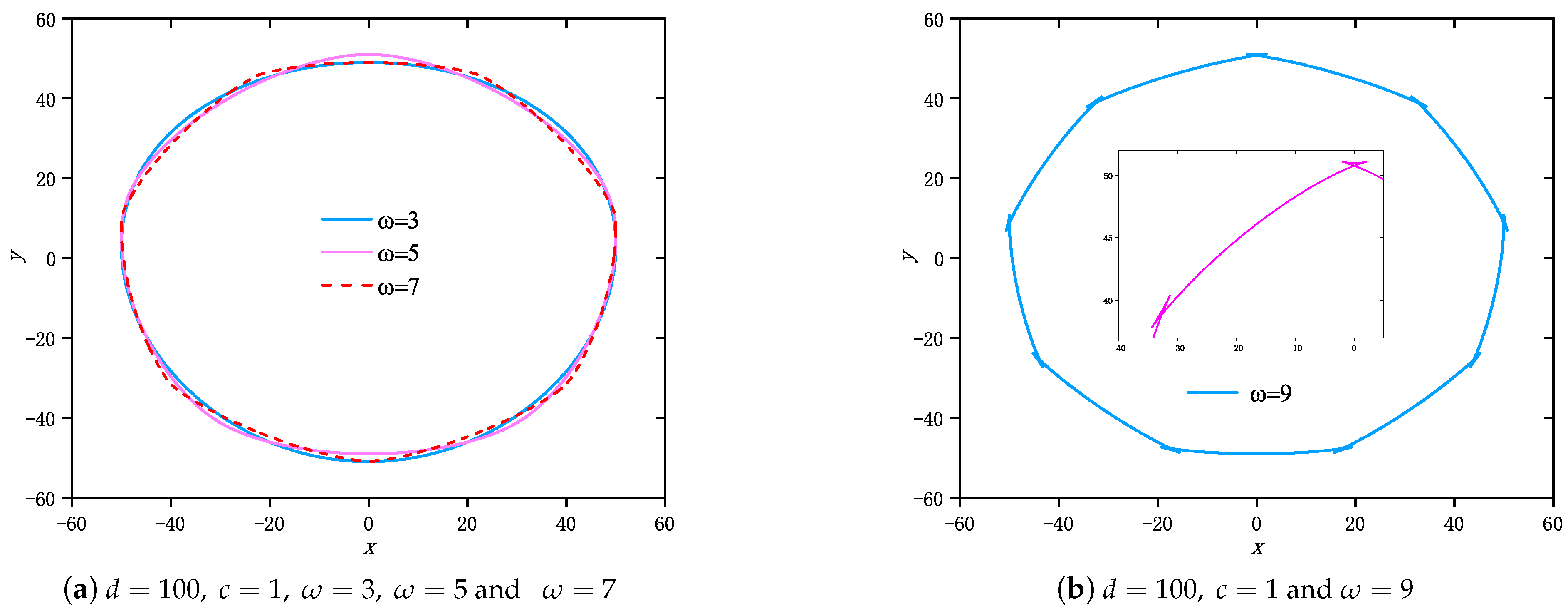
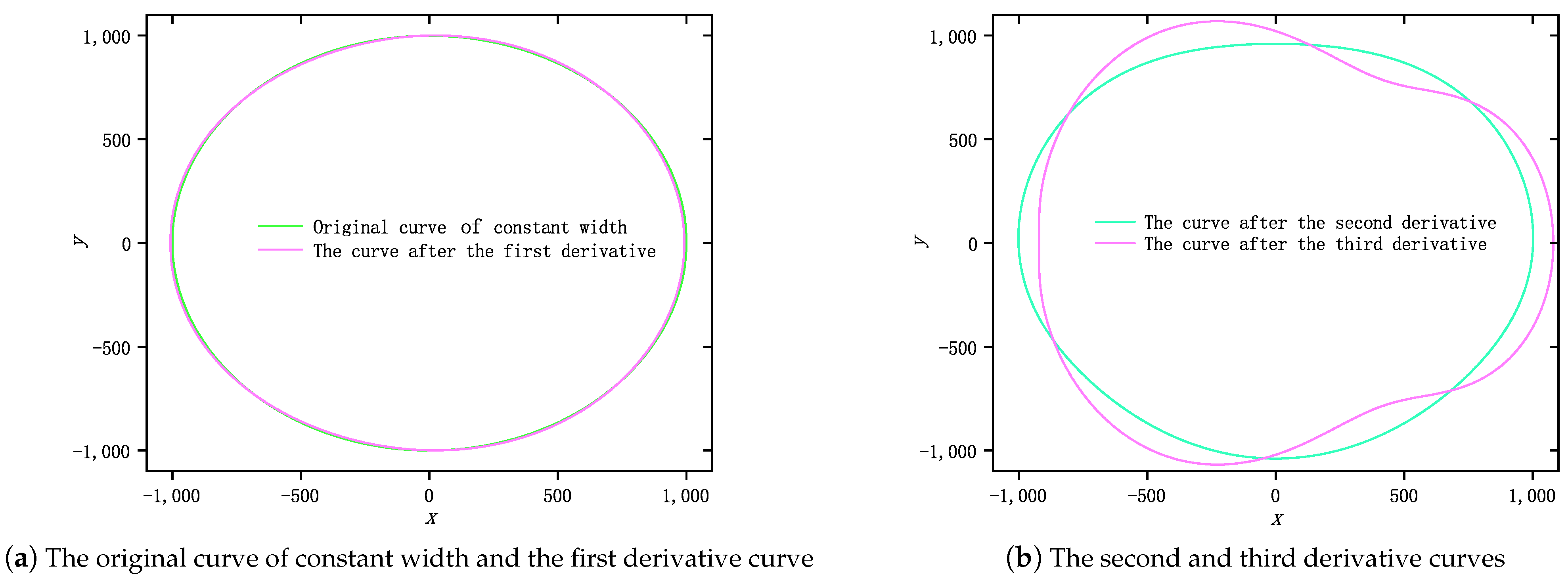
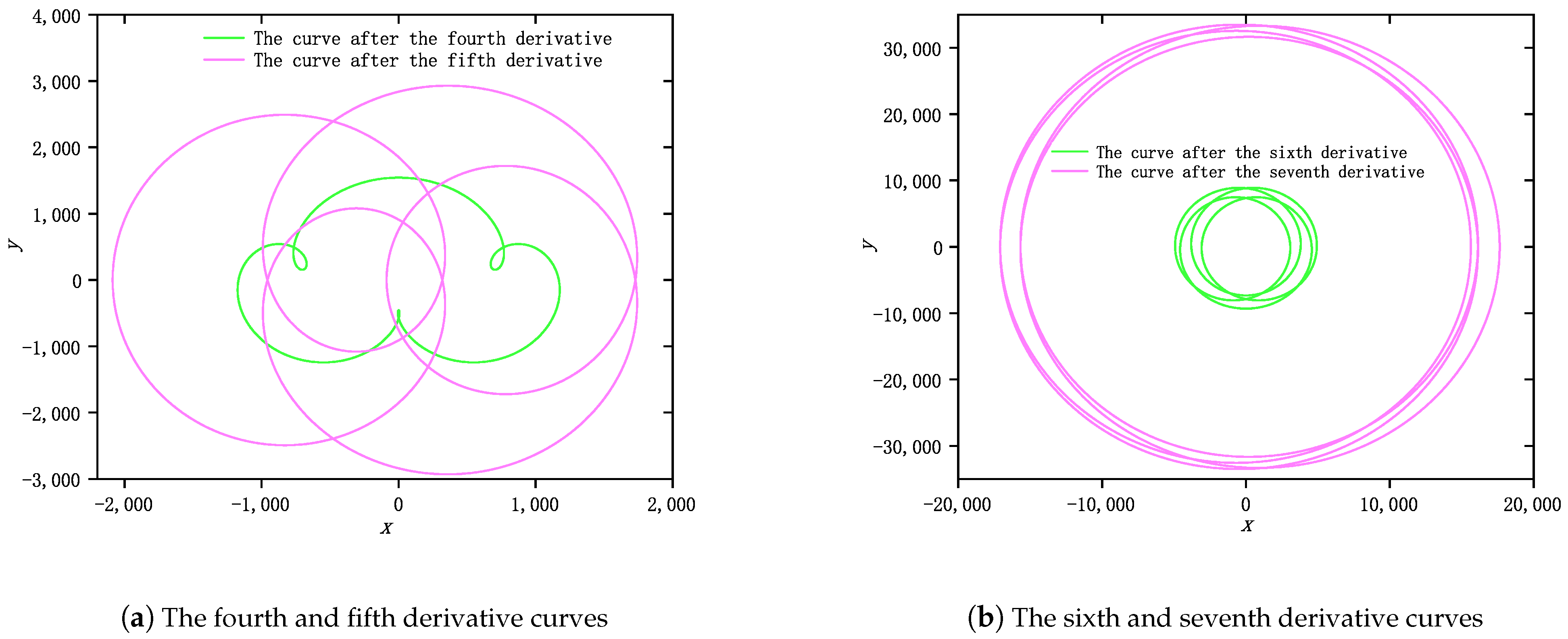
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Moon, Y.; Kota, S. Automated synthesis of mechanisms using dual-vector algebra. Mech. Mach. Theory 2002, 37, 143–166. [Google Scholar] [CrossRef]
- Martini, H.; Mustafaev, Z. A new construction of curves of constant width. Comput. Aided Geom. Des. 2008, 25, 751–755. [Google Scholar] [CrossRef]
- Borovikova, M.; Ibragimov, Z. Convex bodies of constant width and the Apollonian metric. Bull. Public Health Soc. 2008, 31, 117–128. [Google Scholar]
- Groemer, H.; Wallen, L.J. A measure of asymmetry for domains of constant width. Beitr. Algebra Geom. 2001, 42, 517–521. [Google Scholar]
- Rabinowitz, S. A polynomial curve of constant width. Mo. J. Math. Sci. 1997, 9, 3–27. [Google Scholar] [CrossRef]
- Paciotti, L. Curves of constant width and their shadows. Whitman Sr. Proj. 2010, 2010, 20. [Google Scholar]
- Xu, W.X.; Zhou, J.Z.; Chen, F.W. A kind of constant width “isosceles trapezoid”. Sci. China Math. 2011, 41, 855–860. [Google Scholar]
- Yang, Y. A Convex Set of Constant Width with an Opposite Top Sector; Wuhan University of Science and Technology: Wuhan, China, 2015. [Google Scholar]
- Mozgawa, W. Mellish theorem for generalized constant width curves. Aequ. Math. 2015, 89, 1095–1105. [Google Scholar] [CrossRef] [Green Version]
- Mellish, A.P. Notes on differential geometry. Ann. Math. 1931, 32, 181–190. [Google Scholar] [CrossRef]
- Resnikoff, H.L. On curves and surfaces of constant width. arXiv 2015, arXiv:1504.06733. [Google Scholar]
- Kupitz, Y.; Martini, H.; Wegner, B. A linear-time construction of reuleaux polygons. Beitr. Algebra Geom. 1996, 37, 415–427. [Google Scholar]
- Pan, S.L. An application of tangential polar coordinates. J. East China Norm. Univ. Nat. Sci. 2003, 1, 13–16. [Google Scholar]
- Martini, H.; Montejano, L.; Oliveros, D. Sections of bodies of constant width. In Bodies of Constant Width; Birkhäuser: Cham, Switzerland, 2019. [Google Scholar]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, T.; Zhou, Y. A Novel Analysis of the Smooth Curve with Constant Width Based on a Time Delay System. Mathematics 2021, 9, 1131. https://doi.org/10.3390/math9101131
Fu T, Zhou Y. A Novel Analysis of the Smooth Curve with Constant Width Based on a Time Delay System. Mathematics. 2021; 9(10):1131. https://doi.org/10.3390/math9101131
Chicago/Turabian StyleFu, Teng, and Yusheng Zhou. 2021. "A Novel Analysis of the Smooth Curve with Constant Width Based on a Time Delay System" Mathematics 9, no. 10: 1131. https://doi.org/10.3390/math9101131