1. Introduction
Induction machines (IMs), especially squirrel-cage machines, are the most commonly used electrical machines. They have a lot of advantages over other electrical machines, such as easy control, easy repair, low price and size, high efficiency, and so on. For that reason, IMs are considered as the industry’s powerhouse motors [
1]. These machines have many very different applications, for example with constant or variable speed, with constant or variable load, with constant or variable voltage supply, and so on. However, to study and simulate the IM’s behavior (such as voltage drop calculations, load change calculations, system analysis, transient analysis, etc.), its parameters should be estimated with high precision. In that sense, a robust, accurate, and reliable parameter estimation method, as well as an adequate equivalent circuit, is required. For that reason, this problem has been analyzed in the main world standards and in research works that discuss the mentioned standards [
2,
3,
4,
5].
In the literature, there are many induction machine parameter estimation methods that can be categorized in several ways [
6,
7,
8,
9]. In the mentioned papers [
6,
7,
8,
9], a review of estimation methods is also given, with special attention to machine applications. Based on [
7], methods for identification of induction machine parameter values can be classified in the following five categories: methods based on machine steady-state models [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38,
39,
40,
41,
42,
43,
44,
45,
46], methods based on machine construction data [
47,
48,
49,
50], methods based on frequency-domain parameter estimation [
51,
52,
53,
54,
55,
56,
57,
58,
59], methods based on time-domain parameter estimation [
60,
61,
62,
63,
64,
65,
66,
67,
68,
69,
70,
71], and methods based on real-time parameter estimation [
72,
73,
74,
75,
76].
Methods based on machine steady-state models determine machine parameters by solving equations derived from state models [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33,
34,
35,
36,
37,
38,
39,
40,
41,
42,
43,
44,
45,
46]. For this purpose, many estimation methods based on the usage of different kinds of optimization techniques (analytical [
10,
11], iteration [
12,
13], or evolutionary techniques [
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33,
34,
35]) can be used. In general, all these methods base the estimation on catalog data (or manufacturer or nameplate data) [
13,
26,
40,
41,
42,
43], or measured data [
24,
46] with or without including temperature effects [
35,
36] or machine nonlinearities [
37,
38,
39]. Also, it should be noted that this class also includes the standard testing methods, based on open-circuit and short-circuit tests [
2,
3,
4,
5].
Methods based on machine construction data require detailed knowledge of the machine’s geometry and the properties of the materials employed [
47,
48]. However, this class also requires the usage of appropriate software for electromagnetic calculation [
49,
50]. For those reasons, this class of methods is recognized as the most precise, although the costliest. In practice, these methods are employed by manufacturers, designers, and researchers.
In electrical engineering, and especially in control theory, the usage of the frequency domain for solving different problems is popular for estimation of unknown machine parameters by using certain transfer functions, which are observed during performing frequency tests [
51,
52,
53,
54,
55]. Examples of these methods, are Kalman filter [
56], Laplace transformation [
57], Lyapunov method [
58], and signal processing (spectral analysis [
36]. However, it should be noted that this class of methods is not used as common industry practice.
Methods based on time-domain parameter estimation require the usage of a system of differential equations which describe the machine dynamics [
60,
61,
62]. The unknown machine parameter values are adjusted so that the response calculated with a mentioned system of differential equations fits the measured time response. This class contains many subclasses, such as the acceleration test [
63,
64], direct start-up [
65,
66,
67], a method based on transient analysis [
68], methods based on integral calculations [
69], and so on. In these classes of methods, some researches combine mechanical and electrical parameter estimation [
70,
71].
Methods based on real-time parameter estimation require continuous measurement of certain variables, such as speed, current, voltage, and so on, during machine operation [
72,
73,
74,
75,
76]. On the other hand, based on continuously measured data and using usually simplified machine models, these methods are applied to controllers for continuous tuning of control parameters [
76]. In that way, these methods are used as a compensation tool for appropriate machine control as they enable compensation of parameter variation due to temperature change, saturation, broken bars, and other effects in the machine.
In the literature, there are two basic equivalent circuits of the induction machine. One equivalent circuit is called a single-cage equivalent circuit, while the second is called a double-cage equivalent circuit. Basic information about the mentioned circuits, as well as their advantages and disadvantages, will be given in the paper. However, it should be noted that in the literature, the papers which deal with parameter estimation predominantly consider only the single-cage [
5,
33,
38,
39,
51,
64] or only the double-cage [
10,
20,
40] induction machine equivalent circuit.
In this paper, special attention is given to methods based on machine steady-state models, as this class of methods are most represented in the literature. Furthermore, a detailed review of methods from this class is presented. Both single- and double-cage IM equivalent circuits are investigated in this paper. Also, the existing methods predominantly consider nameplate or manufacturer data [
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
40,
41,
42] or measured data [
24,
43,
46,
65,
68] for parameter estimation. In addition, both nameplate data and experimentally determined machine data are used for machine parameter determination. Despite of the importance of the generator option in wind energy systems, in the literature, the authors consider only motoring operation of the IM, while generator operation is only mentioned in two papers [
34,
72]. To redress this point, in this paper, measured values for the 2-kVA, 220-V/110-V, 50-Hz three-phase laboratory IM, as induction motor and generator are considered.
A novel estimation-based method for IM parameter estimation is proposed and tested. Namely, the recently proposed evaporation rate water cycle algorithm (ERWCA) is improved by the simulated annealing (SA) algorithm to obtain a novel hybrid algorithm called SA-ERWCA. It should be noted that the ERWCA is a powerful algorithm which has a lot of very successful applications in estimation problems, such as for short-term hydrothermal scheduling [
77], environmental economic scheduling of hydrothermal energy systems [
78], solar cell parameter estimation [
79,
80], and so on. The main characteristic of the ERWCA is that this algorithm converges very fast to the optimal solution even in large ranges as well as having a stable convergence with multiple runs. On the other hand, SA is a metaheuristic technique that has the potential to approximate global optimization in a large search space [
81]. For that reason, we combined these algorithms. Specifically, we used SA to determine the initial population of ERWCA and therefore to additionally improve its convergence characteristics. Besides, we present a comparison in terms of convergence speed and accuracy between the proposed algorithm and other algorithms used for IM parameter estimation used in the literature. Besides, we compared the SA-ERWCA performance with some competitive optimization techniques for 4 benchmark optimization problems used in the literature.
The application is tested on three different IMs based on their manufacturer data as well as on two IMs based on their measured data. All the considered machines are taken from the literature. However, it should be noted that for some machines we considered only a single-cage equivalent circuit (Machines 1, 4 and 5), while for others we considered a double-cage one (Machines 2 and 3). This is done to make a comparison with literature solutions.
For a proper presentation of the research, the paper is divided into several sections.
Section 2 provides basic information about the IM equivalent circuits.
Section 3 presents an overview concerning the IM parameter estimation techniques.
Section 4 presents the novel SA-ERWCA.
Section 5 gives the results of parameter estimation based on the manufacturer data and measured data found in the literature. The experimental validations of the proposed algorithm, as well as corresponding simulation results, are given in
Section 6. Finally, an overview of the paper and of the significance of the presented research is given in
Section 7.
2. Induction Machine Equivalent Circuits
There are two basic IM models: single cage and double cage. In most papers, the IM is represented by using the single-cage model. However, the double-cage model is also popular especially for the representation of deep-bar machines [
10,
13,
20,
40]. However, apart from the predominantly used models, an IM is modeled by using a triple-cage model in [
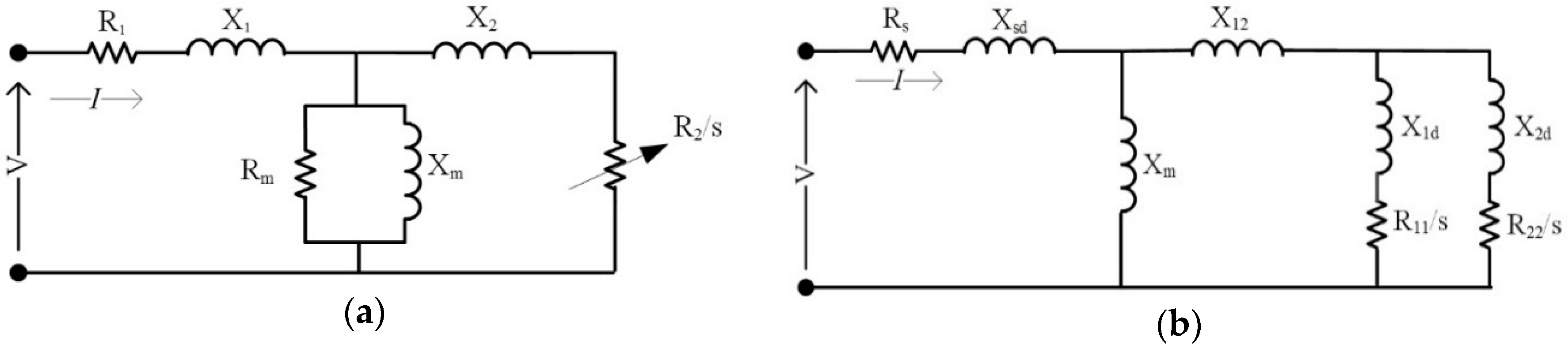
61]. The equivalent circuit of the single-cage model of the IM is presented in
Figure 1a. In this figure,
R1,
R2,
Rm,
X1,
X2, and
Xm represent the stator resistance, rotor resistance in reference to stator side, core loss resistance, stator leakage reactance, rotor leakage reactance resistance in reference to stator side, and magnetizing reactance, respectively [
4]. Therefore, in general, this circuit has six different parameters. However, in many papers dealing with induction machine parameter estimation, the value of the core loss resistance is ignored (for example in [
18,
26,
51,
65] and so on). The steady-state equivalent circuit of the double-cage IM, shown in
Figure 1b, contains, in general, eight electrical parameters. In this circuit, parameters
Rs and
Xsd correspond to stator variables, while
X12,
X1d,
X2d,
R11, and
R22 correspond to rotor variables (one cage is represented by
X1d and
R11, while the second is defined with X
2d and
R22). The magnetizing part of the circuit is represented by
Xm. However, in some papers dealing with the double-cage IM, the value of the stator reactance
Xsd and/or the value of the mutual rotor reactance
X12 are ignored [
5,
13,
20].
It is interesting to note that in [
33,
51] it is stated that the usage of a single-cage induction machine is neither an appropriate model nor sufficient for the prediction of the starting current. Namely, to predict the starting current, a double-cage induction machine model needs to be used. In the double-cage induction machine model, there exist two cages: an outer cage (whose effect is predominant near to zero speed) and an inner cage (whose effect is predominant near to rated speed) [
1]. However, for estimation, the usage of the single cage machine model makes it possible to solve a system of equations with a maximum of six unknown parameters. On the other hand, if we use the double cage model, in the optimization process we have a maximum of eight unknown parameters, which increases the complexity of the problem.
4. SA-ERWCA
A novel hybrid metaheuristic algorithm named SA-ERWCA is proposed in this work. The idea of merging the SA algorithm with population-based algorithms comes from many existing studies that propose hybridization of SA with EAs, as concisely presented in [
81]. According to [
81], the two categories of hybrid SA and EAs can be defined:
(i) Collaborative hybrid metaheuristics are based on the exchange of information between different self-contained metaheuristics and can be divided into two subcategories [
82,
83,
84,
85,
86,
87,
88]:
Teamwork collaborative algorithms are hybrids where both algorithms work in parallel [
82,
83,
84,
85].
Relay collaborative algorithms rely on executing the algorithms one after another [
86,
87,
88].
One such hybrid type is EA-SA, which is based on optimizing the use of EA and additionally improving the obtained optimal solution with the SA algorithm [
86,
87]. Another type of relay collaborative algorithm is SA-EA, in which SA is used to initialize the population of the EA [
81,
88].
(ii) In the case of the integrative hybrid metaheuristics, one algorithm (subordinate) is embedded into the other algorithm (master). Precisely, only a certain function or component of one algorithm is replaced by the other algorithm [
89,
90,
91].
As was mentioned before, ERWCA is a population-based algorithm, which means the first step of this algorithm must be the initialization of the population. Assuming that the size of the population is
Npop and
N is the number of design variables (or dimension of the problem), a population is a matrix with dimensions
Npop ×
N. In the original ERWCA, the population is initialized randomly between the upper bound (UB) and the lower bound (LB) of the design variables. In the hybrid SA-ERWCA proposed in this paper, the SA algorithm is used to initialize the population of the ERWCA, similarly to the relay-collaborative strategy presented in [
81,
88].
Each individual of the population is denoted as
and represents a vector that has
N elements. The initialization process employing the SA algorithm is precisely described with the pseudo-code (PC
0) given in
Table 1.
The parameters of the SA algorithm,
ck and
Lk, are the temperature and number of transitions generated at some iteration
k. They are calculated as explained in [
91]. Also, rand represents a vector of random numbers between 0 and 1. After the initialization process, the obtained population must be sorted according to the value of the fitness function of each individual. Namely, the best individual, which has the minimum fitness function value, is chosen to be the sea. Besides the sea, the population consists of rivers and streams. The predefined parameter of the ERWCA is denoted as
Nr and represents the number of rivers. Thus,
Nr individuals of the initial population with the minimum fitness function value (except the sea) are chosen to be the rivers. Finally, the rest of the population is considered as streams:
Nstreams =
Npop −
Nsr, where
Nsr stands for the number of rivers plus the sea (
Nsr =
Nr +1). According to the water cycle process in nature, each stream flows directly or indirectly to the rivers or sea. The number of streams for each river and sea is calculated as follows:
where
NSn represents the number of streams that flow to the
nth river (or the sea of
n is equal to 1). Since it was highlighted that streams continue their flow to either other rivers or directly to the sea, the next step in the ERWCA is to mathematically model the flow of streams. To that end, two update equations for the position of streams that flow to rivers and the sea are given (3) and (4), respectively:
where
rand is a random number with the range [0, 1],
C is a parameter whose selected value is 2, and
t is the current iteration. After updating the positions of streams, it is necessary to check whether the solution obtained by the stream is better than that obtained by its connecting river. In other words, if the stream has a lower fitness function than the river, the positions of stream and river are switched (the stream becomes a river and the river becomes a stream). Similarly, to streams, the rivers also update their positions using (5), thus:
If the following update equation provides a river whose fitness function value is lower compared to the sea, then an interchange between the sea and the river must be carried out.
To provide an escape from local optima, the evaporation concept is built into the algorithm. In nature, evaporation can happen in different cases. Firstly, if a certain river has only a few streams, it evaporates before it can reach the sea. This process is mathematically modeled by the evaporation rate (
ER), which is defined for each river as follows:
Evaporation of the river is followed by the rain process, which contributes to the formation of a new stream:
The whole evaporation process of the river is presented using the pseudo-code PC
1, presented in
Table 2, where
tmax stands for the maximum number of iterations.
However, in this case, the evaporation process occurs when rivers or streams flow into the sea, causing seawater to evaporate. Before applying the evaporation process, it should be checked whether the rivers and streams are close enough to the sea to cause evaporation. Evaporation of the seawater in the case of a river flowing into the sea is modeled as presented by the pseudo-code PC
2, represented in
Table 3.
Similarly, to the presented model, the evaporation when the stream flows into the sea is modelled with the pseudo-code PC
3, presented in
Table 4.
The equation that describes the rain process in this case is:
where
μ is a coefficient set as 0.1,
randn(1,
N) is a vector of
N standard Gaussian numbers, and
dmax is an adaptive parameter calculated as follows:
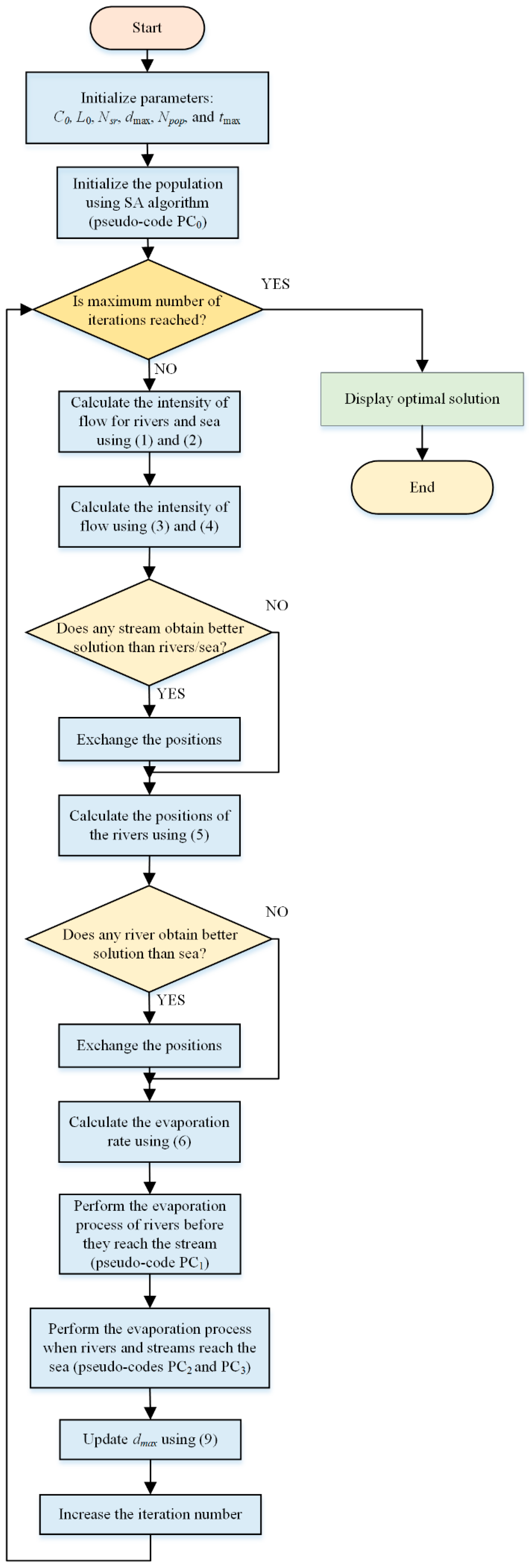
After the evaporation process finishes, one iteration of the SA-ERWCA is completed, and the process is repeated iteratively until the maximum number of iterations is reached. The complete pseudo-code (PC
SA-ERWCA) of the SA-ERWCA is presented in
Table 5. Also, a flow chart of the SA-ERWCA is illustrated in
Figure 2.
5. Simulation Results
First, we compared the SA-ERWCA with some competitive optimization techniques for 4 benchmark optimization problems, presented in
Table 6. The optimization techniques used for comparison include moth-flame optimization (MFO), multi-verse optimization (MVO), PSO, and DEA [
92,
93]. The default parameters of these algorithms are used. The algorithms were executed under the same conditions to attain fairness in comparative experiments. Among them, the population was set to 30, the dimension (
n) and the maximum iteration number was set to 30 and 1000, respectively. All the compared algorithms were run individually 30 times in each function and averaged as the final running result.
Further, standard deviation (
STD), average results (
AVG), and median (
MED) were calculated to evaluate the results obtained to measure the experiment results.
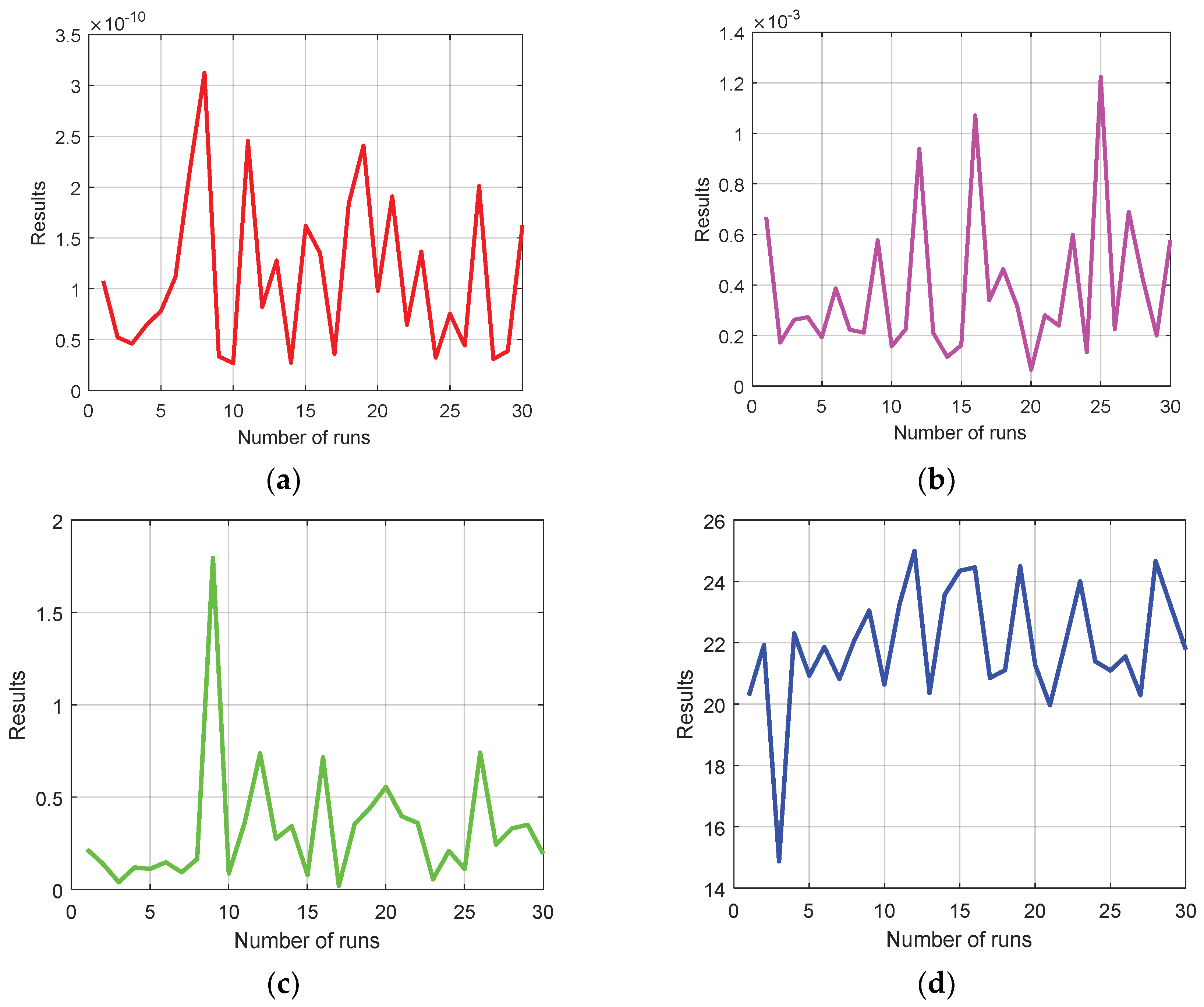
Table 7 presents the comparison results of the four functions during 300,000 evaluations. Also,
Figure 3 shows the values of the
OF for the four functions during the different runs. From
Table 7, one can note that the
AVG and
MED values of the SA-ERWCA are better than those obtained using the other algorithms, which validate the effectiveness of the SA-ERWCA, even with the increased number of iterations during 300,000 evaluations.
Second, the application of SA-ERWCA for IM parameter estimation is presented. The application is tested on three different IMs based on their manufacturer data as well as on two IMs based on their measured data. All the considered machines are taken from the literature. However, it should be noted that for some machines we considered only a single-cage equivalent circuit (Machines 1, 4 and 5), while for others we considered a double-cage one (Machines 2 and 3). This is done to make a comparison with literature solutions.
For all simulation results, the population size was 200, while the maximum number of iterations was 150. Note that in all equations in this section the index “
cal” represents the calculated value, the index “
m” represents manufacturer data, and the index “
mes” represents measured data. Also, mathematical equations for calculation of all machine variables are given in
Appendix A for the single-cage machine (SCIM) and in
Appendix B for the double-cage machine (DCIM).
5.1. Simulation Results for Machine 1
In [
14], the authors proposed the usage of the SFLA for SCIM estimation based on manufacturer data presented in
Table 8. Also, they compared the obtained parameter values, as well as the machine characteristics, with the corresponding results obtained by using DE, PSO, and GA. The circuit parameters are found as the result of the error minimization function between the estimated and manufacturer data. In [
14] the following OF is used:
so that:
The proposed SA-ERWCA technique is applied for parameter estimation of Machine 1, considering the parameter range given in
Table 8.
A comparative study with SFLA, DE, GA, PSO, and MSFLA was done to validate the performance of the proposed algorithm, as presented in
Table 9 and
Table 10. It can be seen that SA-ERWCA gives better results than SFLA, DE, GA, PSO, and MSFLA. Furthermore, the value of the
OF given in bold in
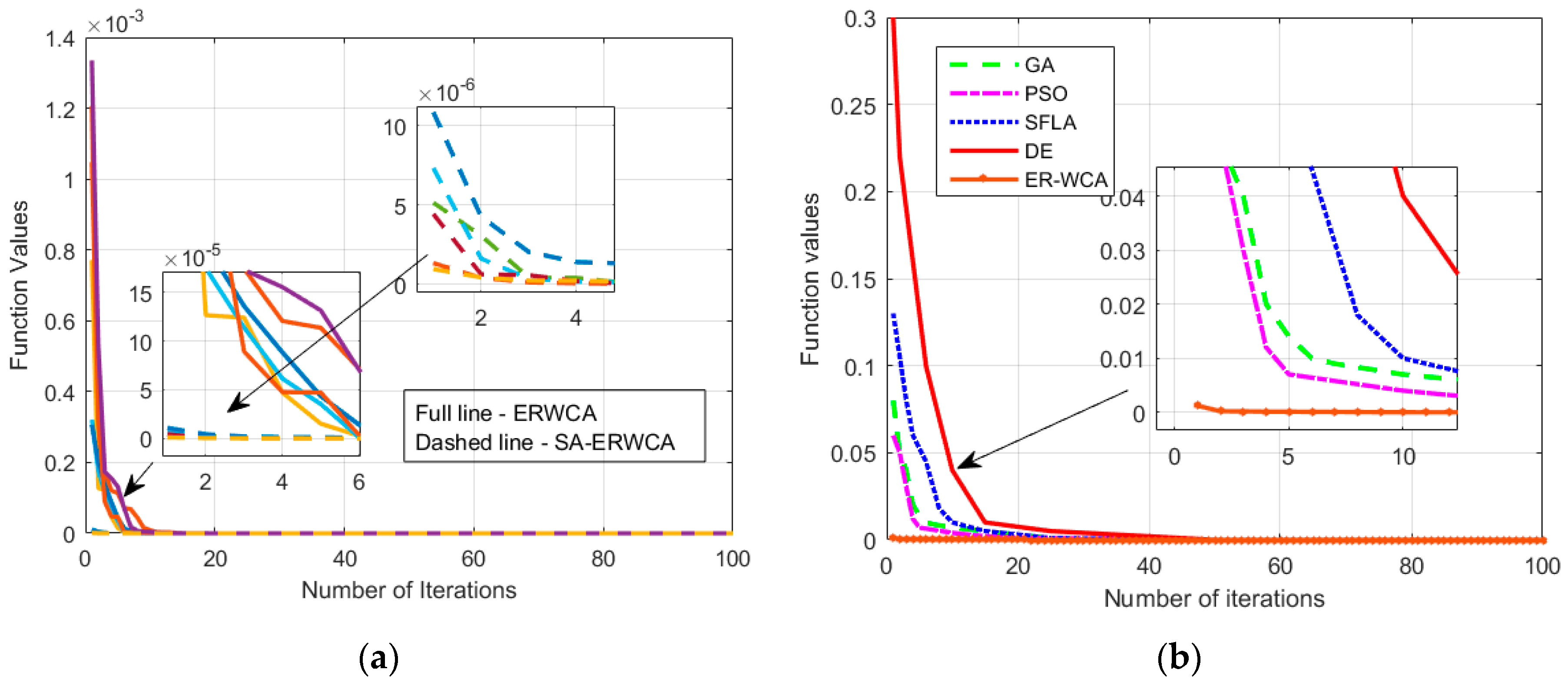
Table 10 is considerably smaller with the proposed SA-ERWCA. It is very clear that SA-ERWCA obtains better convergence characteristics; the convergence characteristics of SA-ERWCA are much better for an initial number of iterations.
In the case, when we use SA-ERWCA, for a few starting iterations, the OF value is more than 10–15 times better in comparison with the classic ERWCA. For a higher number of iterations, the values of the objective function obtained by using SA-ERWCA are equal to or better than the corresponding curves obtained using ERWCA.
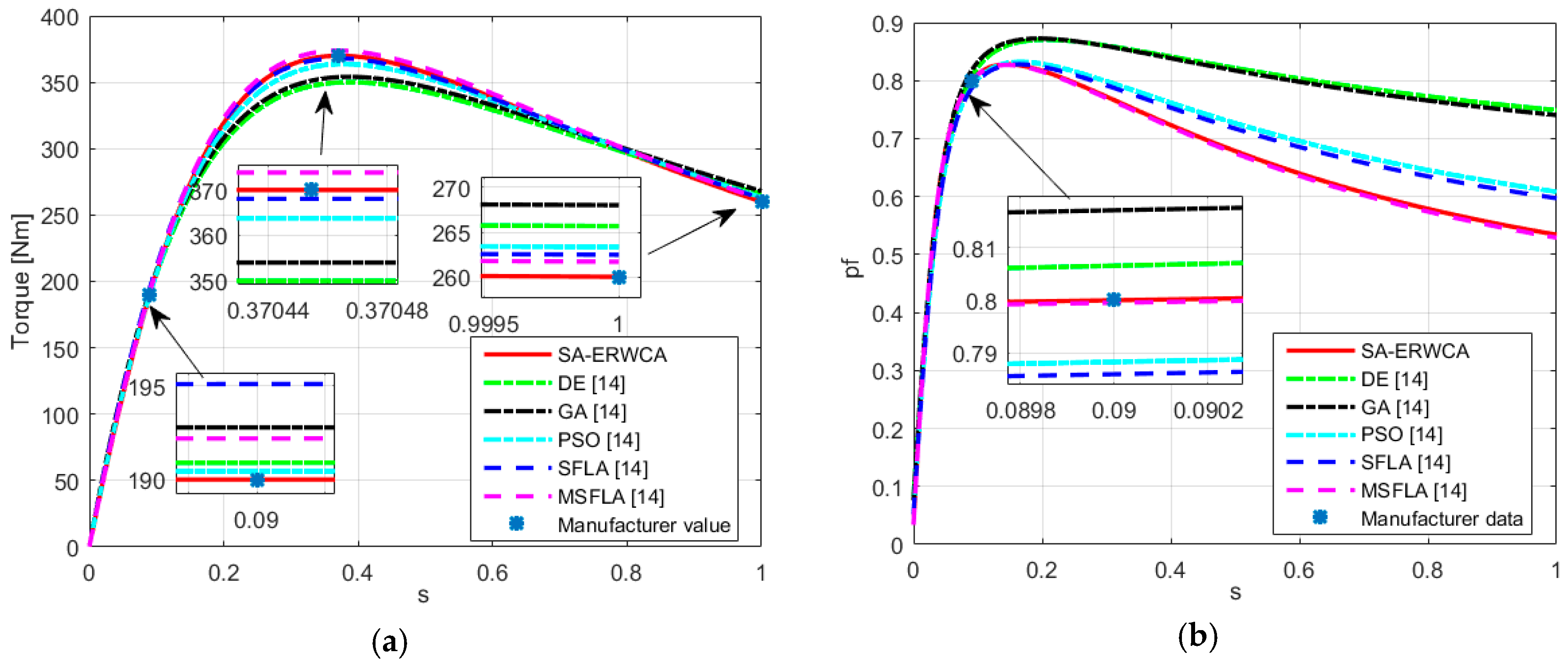
Figure 4 shows a comparison of the curves of the torque and power factor, respectively, obtained with SA-ERWCA, DE, GA, PSO, SFLA, and MSFLA. It can also be seen in this figure that the SA-ERWCA results for all of the slip zones are in good agreement with the manufacturer values.
Figure 5a compares the mean values of the best six objective functions versus the number of iterations for ERWCA and SA-ERWCA when 100 simulation runs are performed.
The comparison of convergence characteristics between different algorithms is presented in
Figure 5b. This figure shows that SA-ERWCA converges rapidly and reaches better results than the rest of the algorithms.
5.2. Simulation Results for Machine 2
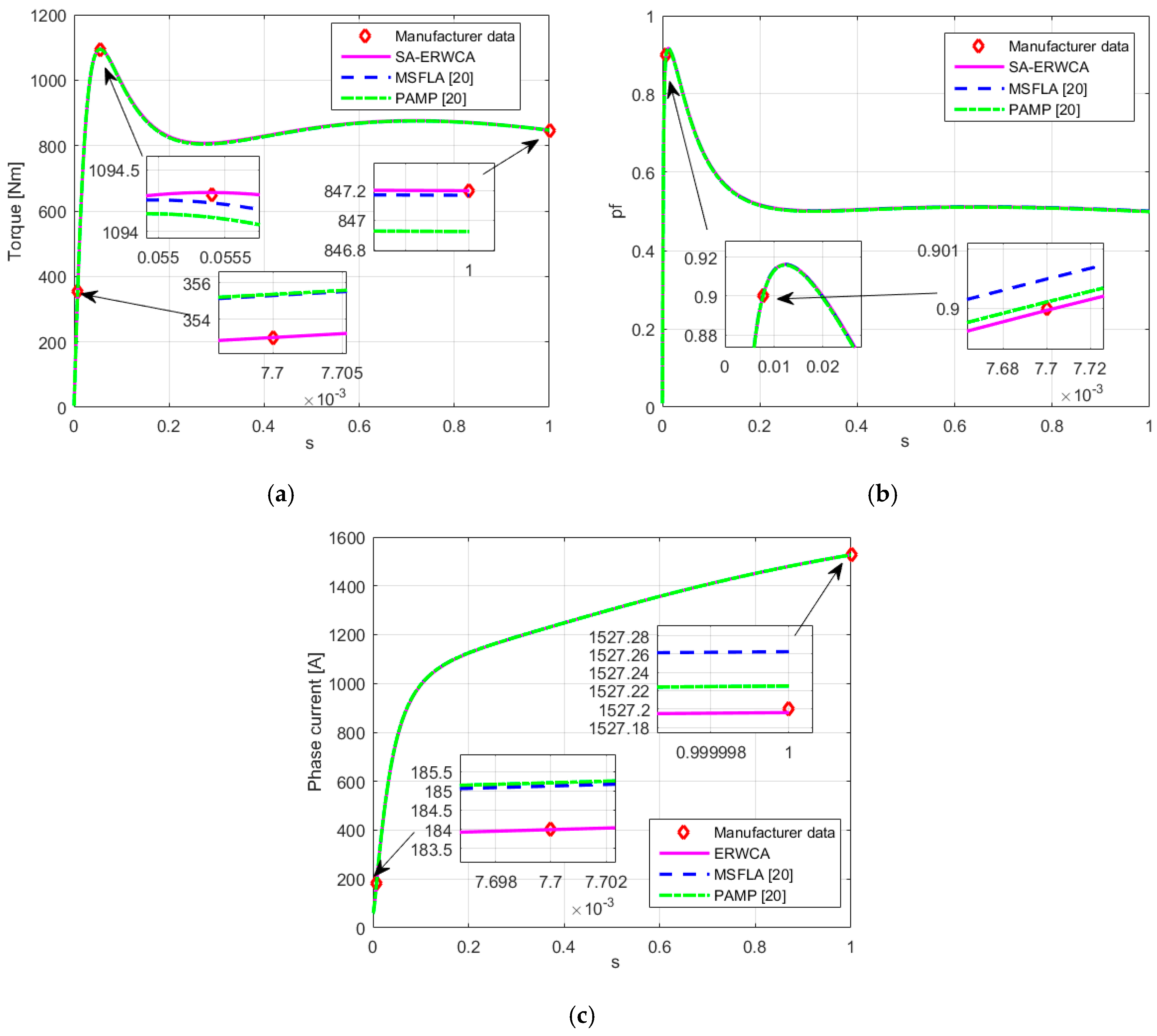
In [
20], the authors proposed the usage of PAMP and MSFLA for DCIM parameter estimation based on manufacturer data. For parameter estimation, the authors used the manufacturer data given in
Table 11. In this case, the
OF is as follows:
so that:
A comparative study with PAMP and MSFLA was done to verify the effectiveness of the proposed algorithm (as shown in
Table 12 and
Table 13), in which it is evident that SA-ERWCA gives better results than PAMP and MSFLA and therefore fits the manufacturer data better.
A comparison of the curves of the torque, power factor, and machine current, respectively, obtained by SA-ERWCA, PAMP and MSFLA is presented in
Figure 6. It can be seen that the results of SA-ERWCA for all of the slip zones are in very good agreement with the manufacturer values. Also, its superiority over other considered algorithms is very evident.
5.3. Simulation Results for Machine 3
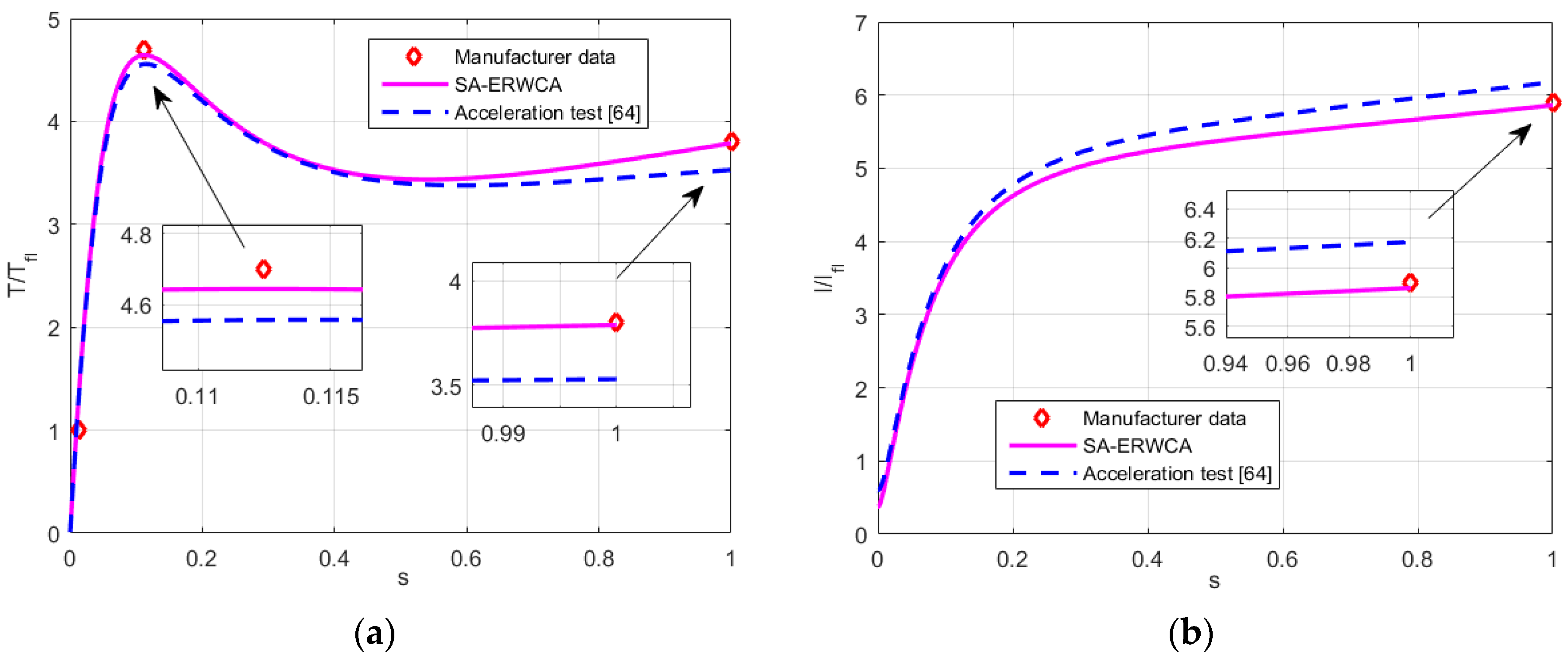
In [
64], the authors proposed the usage of the instantaneous power of a free acceleration test for IM double-cage motor parameter estimation, in which, the authors compared the obtained results with the corresponding values of measured and manufacturer data presented in
Table 14. Further, we have used the proposed algorithm, machine manufacturer data, and the following function.
so that:
The obtained results are presented in
Table 15. In this table, the results obtained using an acceleration test are presented, too. The comparison of the results in terms of absolute error with manufacturer data is given in
Table 16. The errors obtained with the proposed algorithm are smaller than those obtained with the acceleration test. The same conclusion can be derived by considering the torque versus slip and phase current versus slip characteristics, presented in
Figure 7.
5.4. Simulation Results for Machine 4
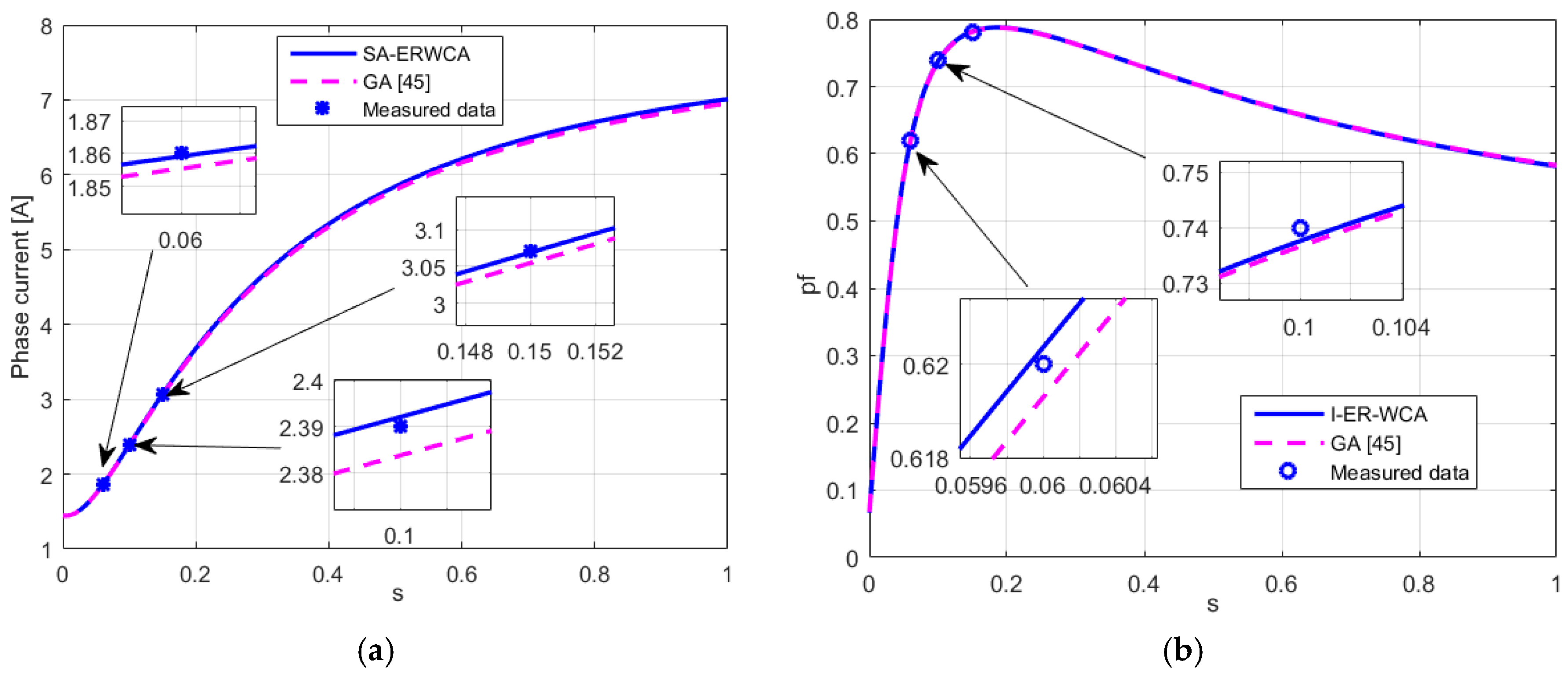
In [
45], the authors proposed the usage of a GA for a SCIM parameter estimation based on measured data. The measured values of machine slip, current, and power factor are given in
Table 17.
The circuit parameters are found as the result of the error minimization function between the estimated and measured data. In [
45] the following
OF is used:
where
i represents the measured point (in this case
n = 3, while
i = 1, 2, and 3).
Table 18 presents the results obtained using the proposed SA-ERWCA technique as well as the GA from [
45]. For SA-ERWCA, ranges of the considered parameters are:
.
The comparisons of GA and SA-ERWCA results with measured data are presented in
Table 19. The comparison of the corresponding phase current versus slip and power factor versus slip characteristics is presented in
Figure 8. It is clear that SA-ERWCA has better results than GA. Also, the value of the
OF is smaller with the proposed SA-ERWCA.
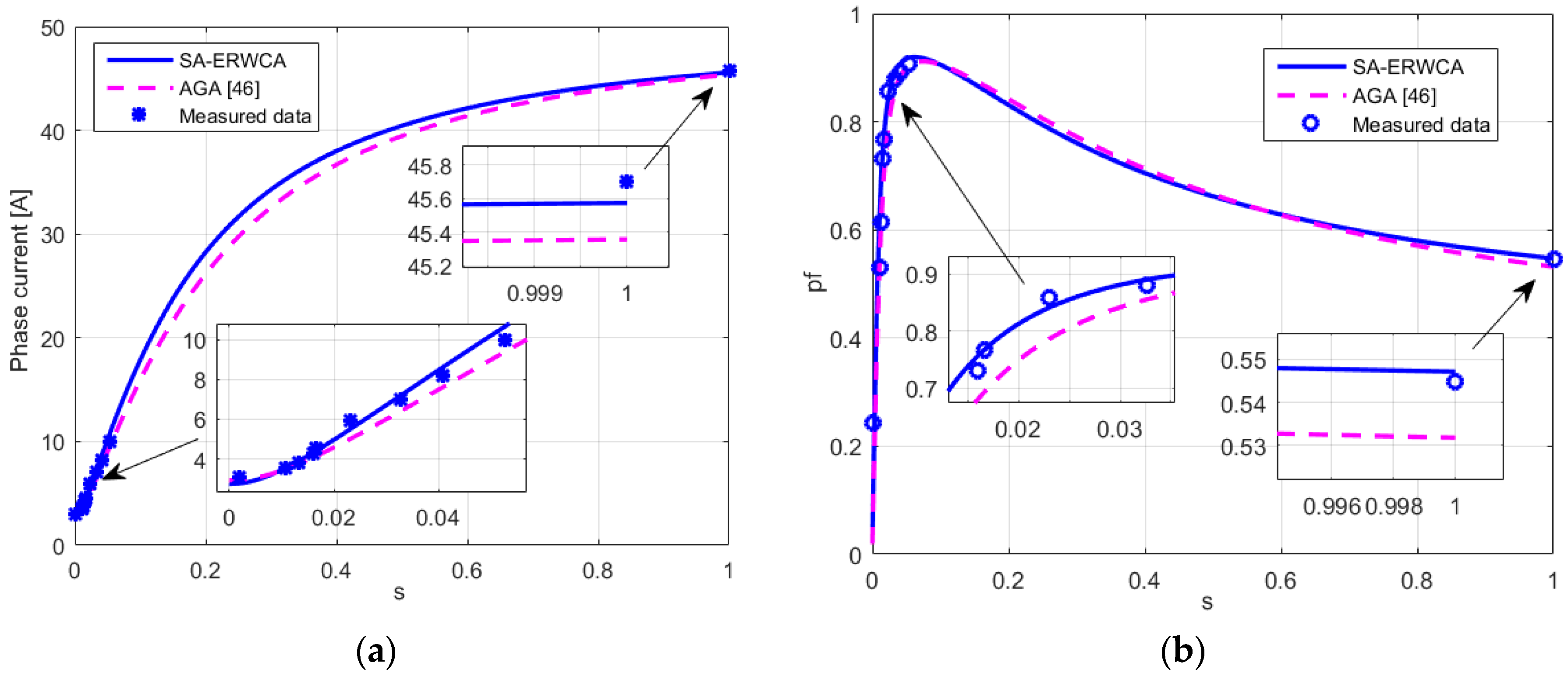
5.5. Simulation Results for Machine 5
In [
46], the authors proposed the usage of the new adaptive GA (AGA) for SCIM (with data presented in
Table 20) parameter estimation based on measured data. In which Machine 5 is a three-phase squirrel cage induction motor ELPROM, Type A0-112 M-2B3T-11. The measured values of machine speed, current, and power factor are given in
Table 21.
To obtain the unknown values of parameters, the authors used the measured phase current value and its power factor, and the same
OF given in (26). The results are presented in
Table 22 and
Table 23.
Visualization of the results obtained is shown in
Figure 9 to declare that the SA-ERWCA obtains results that better fit the measured results, which demonstrate the applicability, efficiency, and accuracy of the proposed estimation technique for different IMs (different in respect to power value), different objective functions, and different kinds of input data.
6. Experimental Results
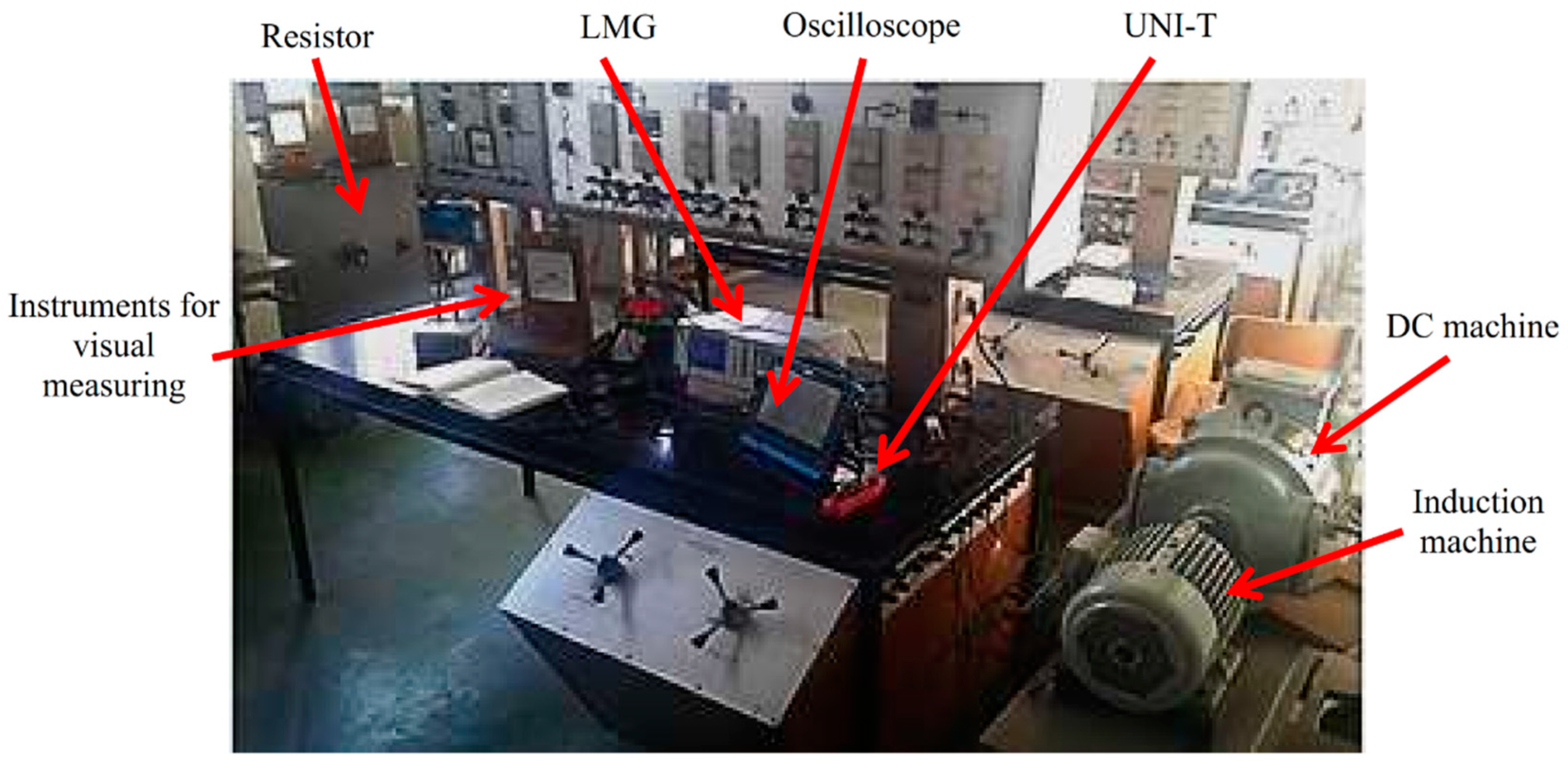
The verification of the applicability of SA-ERWCA for the IM parameter estimation is demonstrated by considering a 4-kW three-phase IM from the Laboratory for Electrical Machines and Drives at the Faculty of Electrical Engineering (University of Montenegro), shown in
Figure 10. The bench used for obtaining the experimental data (phase current versus slip, power factor versus slip, input power versus slip, and reactive power versus slip characteristics) is composed of an IM (KONCAR, 4 kW, 380 V, 8.6 A, 1435 rpm,
pf = 0.83) coupled to a DC motor/generator (KONCAR 230 V, 22.2 A, 5.1 A, 1450 rpm).
The DC machine is used as generator or motor. Namely, it is used to vary the slip of the IM over the negative (generator) and positive (motor) slip range. For the DC generator, the output is connected to a variable resistor. Active power, reactive power, voltage, and current are measured with an LMG power analyzer (Leistungsmessgerät). The speed is measured by using a UT372 speed sensor (UNI-T, Dongguan City, China), while the instantaneous value of the phase current and voltage are measured by using a TO102 oscilloscope (Shenzhen Micsig Instruments CO, Shenzhen, China) to check the RMS value of the phase current and voltage.
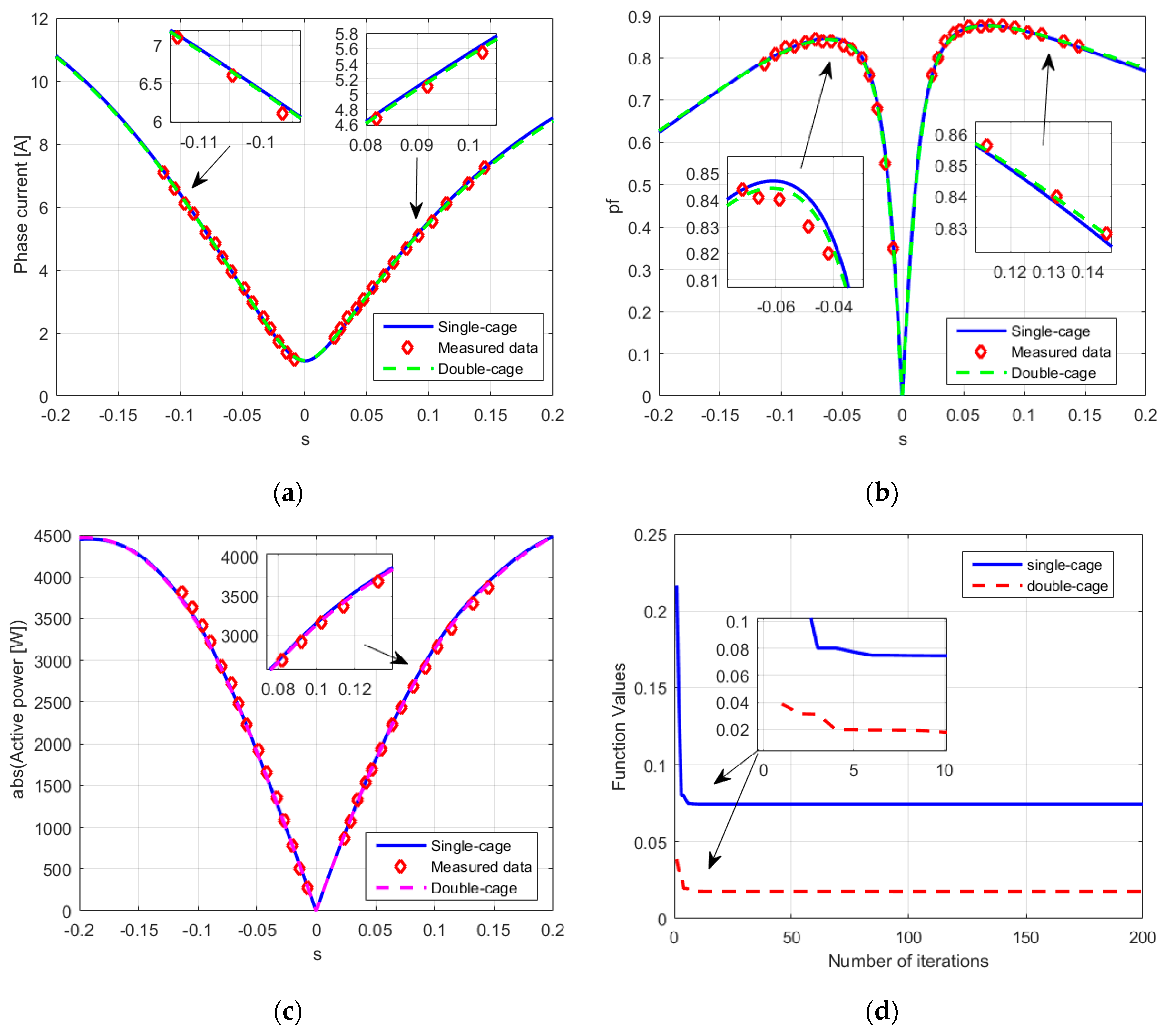
The measured phase current versus slip, power factor versus slip, and input power versus slip characteristics are shown in
Figure 11. By using the obtained results and applying the proposed method and
OF given in (26), the IM parameters were determined (as shown in
Table 24) for both single-cage and double-cage equivalent circuits.
The calculated phase current versus slip, power factor versus slip, input power versus slip for the obtained machine parameters are also shown in
Figure 11.
As can be seen, the calculated characteristics correspond very well with the measured characteristics. However, from the presented results and by observing the value of the calculated objective function, it is very clear that the double-cage model gives a better fit with the experimental results. Also, the proposed method guarantees that an optimal solution will be found quickly (as illustrated in
Figure 11d). For the analyzed case, the accuracy of the obtained results is appropriate after only a few iterations.


 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}