1. Introduction
A number of new theoretical and practical problems of scientific knowledge lead to mathematical models, which are described by boundary value problems for differential equations. An important contribution to the development of various directions of the theory of differential-operator and differential-functional equations was made by V. Azbelev [
1], A. Antonevich, A. Bitsadze [
2], M. Gorbaczuk [
3,
4], A. Mishkis [
5], A. Nakhushev, V. Romanko, A. Skubachevsky [
6,
7], S. Yakubov [
8,
9], and other authors.
The problem of equivalence (similarity) of differential and integral Voltaire operators was studied in the works of J. Delsart, B. Levitan, V. Marchenko, A. Povzner, and M. Phage [
10]. Furthermore, mathematical models and analytical approaches were investigated by scientists [
11,
12,
13,
14,
15]. Transformation operators have a significant role in the application of the methods of the inverse problem of scattering theory. An approach to the study of similarity was developed by A. Baskakov [
16] for some classes of unbounded operators. A. Aibeche [
17] found conditions that guarantee the solvability of abstract differential equations of the elliptic type with the operator in the boundary conditions.
The first-order linear problems with involution and periodic boundary conditions were studied by A. Aibeche, N. Amroune, and S. Maingot [
18]. Different cases for which the Green’s function can be obtained explicitly were studied and the results on the existence and uniqueness solution were presented.
The mixed problem for an elliptic equation with involution was investigated by A. Ashyralyev, and A. Sarsenbi [
19,
20]. These authors resolved this task of reducing the boundary value problem for the abstract elliptic equation in a Hilbert space with a self-adjoint positive definite operator. Operator tools permit obtaining stability and coercive stability estimates in Holder norms, in t, for the solution.
A. Cabada and F. Tojo [
21] present an innovative result concerning the existence, uniqueness, and maximal regularity of the strict solution of the elliptic equations class with nonlocal boundary conditions.
The isospectrality of differential operators is an important object of research in inverse problems of spectral geometry in the study of the M. Katz problem and has an important application for the analysis of the problem of thermal conductivity and wave processes. The authors of [
22] considered two inverse problems for the wave equation with involution and presented the results on the existence and uniqueness of the solutions to these problems.
The work of [
23] proves that the system of eigenfunctions is complete and minimal in
, but is not the basis. For a rational system, r is indicated as the method of choosing associated functions for which the system of root functions of the problem is an unconditional basis in
. Through applying the method of the separation of variables, the works of P. Kalenyuk and Ya. Baranetsky [
24,
25,
26,
27,
28,
29,
30,
31] studied nonlocal problems with a multiple spectrum and a system of eigenvalues. The operators of these problems were investigated as isospectral perturbations of the operators of the corresponding periodic problems.
The conditions for the existence and uniqueness of a solution to nonlocal multipoint problems for differential-operator equations and partial differential equations were established and the spectral properties of the operators of these problems were studied.
Proposed by P. Kalenyuk, Ya. Baranetsky’s [
23] method allowed building and investigating nonlocal problems, the pointwise spectrum of which coincided with the pointwise spectrum of the corresponding non-perturbated problem, which was better studied, and establishing the completeness and basicity of the system of eigenfunctions of these problems.
In further works of Ya. Baranetsky [
22], using the same method, the author investigated perturbations of boundary conditions of Dirichlet-type problems for linear elliptic and hypoelliptic differential equations with partial derivatives and differential-operator equations, which left the pointwise spectrum, completeness, and minimal spanning of the system of eigenfunctions of the problem unchanged. Further, this method was used to study the operators of the Dirichlet problem with the same spectrum, which arise when the Laplace equation is perturbed by differential operators of an infinite order. It turned out that within this method, there are no perturbations of differential equations by differential operators of a finite order, which leaves the pointwise spectrum, completeness, and minimal spanning of the system of eigenfunctions of the operator of the Dirichlet problem unchanged. Naturally, there are problems when constructing and analyzing perturbations that leave the pointwise spectrum of linear differential equations in an even order by differential-functional equations of an order not higher than the order of the basic equation, and when studying the properties of solutions to the Dirichlet problem for these equations.
The construction and study of perturbation classes of operators of the Dirichlet problem for ordinary differential equations of the second order, differential-operator equations of an even order, and elliptic equations of the second order, which leave the pointwise spectrum, completeness, and minimal spanning of the system of eigenfunctions unchanged, are focused on in the works of [
24,
25,
26,
27,
28,
29,
30,
31]. In these works, the authors investigated the spectral properties of the considered operators and obtained the eigenfunctions of the operators of perturbed problems and elements of biorthogonal systems.
The basicity of Riesz systems of eigenfunctions of operators of perturbed problems proves the similarity of these operators to operators of non-perturbated tasks. The unambiguous solvability of the researched problems is established. We obtained the form of solutions to perturbed problems and their estimation. The importance of this work lies in its application to the various fields of mathematics and physics and in the ability to explore new problems based on fundamental problems.
3. Results
Let
=
,
—the set of really valued functions defined and square integrable functions (with respect to the Lebesgue measure) in the
; H—separable Hilbert space,
,
,
,
,
with the norm
. Let
be the task operator:
and
,
—the Soboleva–Sobodeckoho space [
32].
We consider operators and , and their expansion to space , is the identity operator, , .
Define space ,
, .
Then, for operators
, it holds that
Then, for operators
, and
, it holds that:
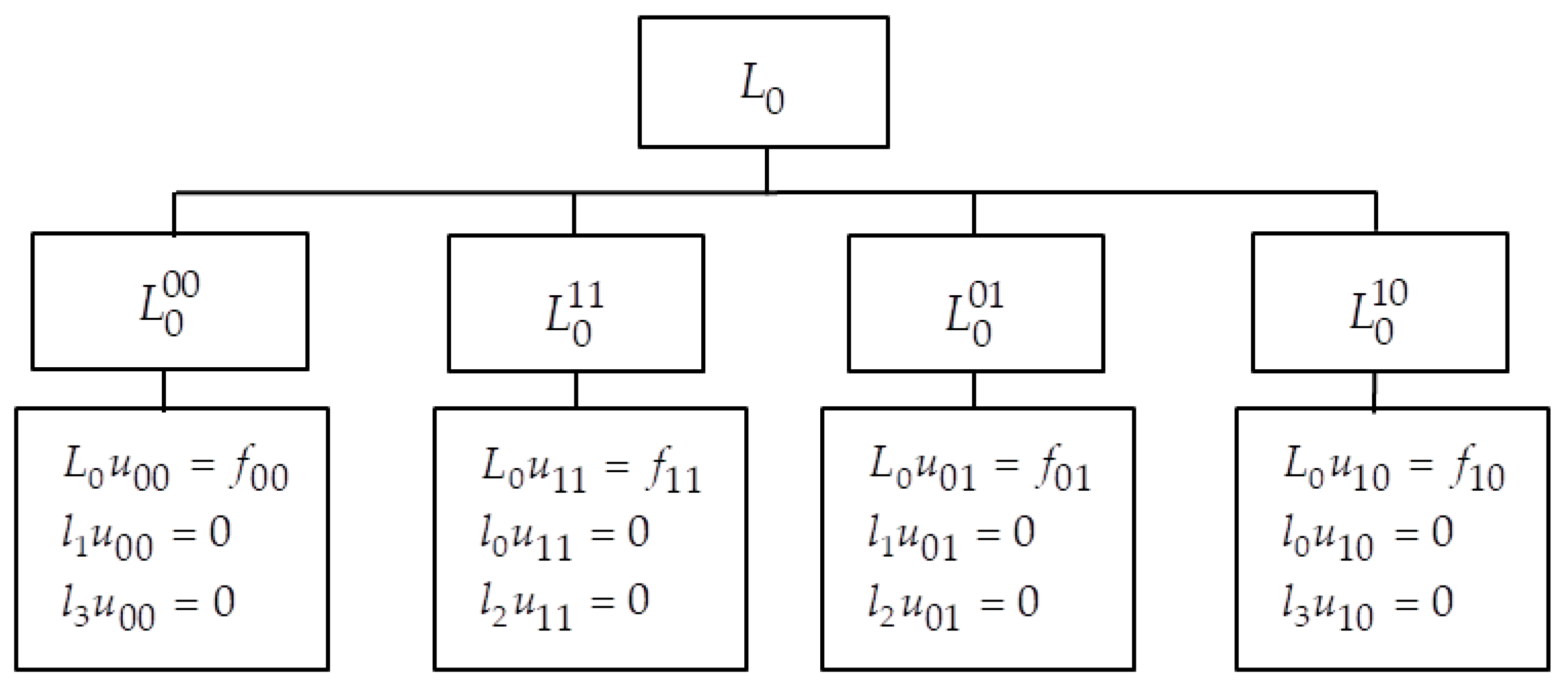
We consider the following problem:
here
where
, and functions
, where it is assumed that
When
α = 0, we obtain a boundary value problem for an elliptic equation. This problem can be divided into two semi-homogeneous problems, (11), (12) and (13), (14), each of which is well researched, and it is a well-known fact that each of which has a single solution and holds inequality
m = 1, 2
and
Given that , and operator has the representation (which is easy to show), .
We construct boundary value problems for each operator. The boundary value problems for each operator are shown in
Figure 1.
Definition 1. The functionis called a solution to problems (7)–(9) if the function u satisfies the conditions:,.
At first, we consider the problem (15), (16):
Let be the task (15), (16) operator, , and operator , . Operator is the perturbation of operator .
When , we get for operators , .
Lemma 1. The operatorhas the following properties:.
Proof of Lemma 1. Since the operator has the form
, and from the definition of the projector
and properties (1) and (2), we obtain
Let , , then , .
Let , then using Formula (17) and the properties of operators (3)–(5), we obtain .
Finally, we get and , . Lemma is proved. □
We consider the spectral problem:
Theorem 1.
1. The pointwise spectrum of operatorcoincides with that of operator:.
2. System of eigenvectors is complete and the minimal spanning system (set) of a space.
Proof of Theorem 1. Operatorhas the eigenvalueand the system of eigenvectors.
Define eigenvectors of operator
:
where
are eigenvectors of operator
,
.
If then , follows from Lemma 1, and it also holds that .
Therefore, eigenvectors
of operator
are also eigenvectors of operator
:
If
, eigenvectors of operator
are defined as below:
Let in the form of a series , where are unknown coefficients.
To determine the coefficients , combining expression (20) and expression
, we obtain
On the other hand,
. From the previous equality and the fact that the system
is orthonormal of a Hilbert space
, we obtain
Finally, we have system
of eigenvectors:
Now, we want to prove that system is complete.
We will prove it by this contradiction. For every using the properties of operators (6) where . Let , , .
Let , using Formulas (6) and (19), we obtain: .
If then and using the fact that the system is orthonormal of a space , we obtain .
If then , and using the fact that the system is orthonormal of a space , we obtain .
Let , using Formula (20) and inclusion , we obtain
If then , and also using the fact that the system is orthonormal of a space , we obtain .
If then , ; similarly, one gets .
We conclude that , which is a contradiction. We proved that system is complete in the space of .
Now, we want to prove that system is the minimal spanning system (set) of a space .
Define operator
as below:
Let , and —identity operator .
Therefore, using Formula (21), it holds that
Then,
. Operator
is the transformation operator and it follows that operators
and
exist:
Using Formula (22), define the elements of the system biorthogonal to the system : where . System of eigenvectors is the minimal spanning system (set) of a space . Theorem 1 is proved. □
Theorem 2. The system of eigenvectors is a Riesz basis of a space.
Proof of Theorem 2. We will prove that operator is bounded.
For every
, we have
.
Using equality: .
We obtain , where .
Operators
,
are bounded to a space
. Following the theorem [
22], we obtain that the system of eigenvectors
is a Riesz basis of a space
.
Theorem 2 is proved. □
We consider a boundary value problem:
where
.
Now, let us proceed to problem (23), (24).
The function
can be presented as the sum
. Functions
are solutions to the following problems:
Theorem 3. Ifthen a unique solution to problem (25) exists and satisfies the following estimate: Proof of Theorem 3. Now let us proceed to problem (25). The function
can be presented as a sum:
where
.
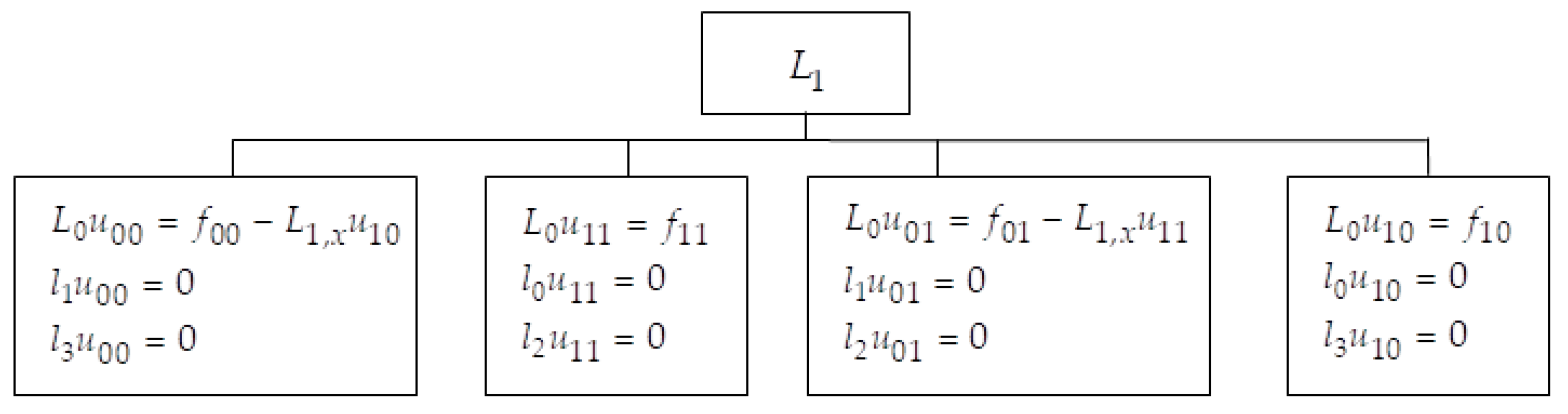
Combining both expressions (25) and (28), we obtain
Using Lemma 1 (
Figure 2), it also holds that
and
We solve each of these problems similarly to problems (11) and (12).
Using the properties of operator (4) and inclusion
(following Lemma 1), problem (25) is divided into parts:
Problems (29) and (30) are similar to problems (11) and (12). There are unique solutions to each of the problems (29) and (30) and they hold inequality
For problems (31) and (32), we prove that
and
:
We proved that problems (29) and (30) are similar to problems (11) and (12). So, there is a unique solution to these problems and it holds inequality
Following the previous results and equality: , we obtain the existence of a unique solution to problem (25) that satisfies inequality (27).
Theorem 3 is proved. □
Solution of problem (25) can be presented as a sum:
, where
are the solutions to problems (33) and (34):
We rewrite problem (33) in differential-operator form, and it is defined as operator , .
Since operator
is positively defined, then operator
exists:
Let
Problem (33) has a differential-operator formulation:
Further, we rewrite problem (34) in differential-operator form.
Define operator: ,
.
Since operator
is positively defined, there is the operator
Let .
Problem (34) has a differential-operator formulation:
Problems (35) and (36) were researched [
25], each of which has a single solution and holds inequalities
Additionally, they hold
where
.
Theorem 4. For everyandexists a unique solution,, to problems (25) and (26) which satisfies the following inequality: Proof of Theorem 4. The existence of a single solution, , to problems (22) and (24) follows from the existence of solutions to problems (25) and (26), respectively, of Theorem 3, and for Formula (38), a unique solution, , exists and holds inequality , therefore, by adding inequalities (27) and (38), we obtain inequality (39), where .
Theorem 4 is proved. □




{kind=link}
{kind=link}

