1. Introduction
In the present work, we aim to study the split feasibility problem (SFP), which is to find a point
where
C and
Q are nonempty closed and convex subsets of real Hilbert spaces
and
, respectively, and
a bounded linear operator. In 1994, the SFP was first investigated by Censor and Elfving [
1] in finite dimensional Hilbert spaces. There have been applications in real world such as image processing and signal recovery (see [
2,
3]). Byrne [
4,
5] introduced the following recursive procedure for solving SFP:
where
,
and
are the projections onto
C and
Q, respectively, and
is the adjoint of
A. This projection algorithm is usually called the CQ algorithm. Subsequently, Yang [
6] introduced the relaxed CQ algorithm. In this case, the projections
and
are, respectively, replaced by
and
, where
where
is convex and lower semicontinuous, and
, and
where
is convex and lower semicontinuous, and
In what follows, we define
and
Precisely, Yang [
6] proposed the relaxed CQ algorithm in a finite-dimensional Hilbert space as follows:
Algorithm 1. Let. For, definewhere It is seen that, since the sets and are half spaces, the projections are easily to be computed. However, the step size still depends on the norm of A.
To eliminate this difficulty, in 2012, López et al. [
7] suggested a new way to select the step size
as follows:
where
is a sequence in
such that
for some
. They established the weak convergence of the CQ algorithm (Equation (
2)) and the relaxed CQ algorithm (Equation (
7)) with the step size defined by Equation (
8) in real Hilbert spaces.
Qu and Xiu [
8] adopted the line-search technique to construct the step size in Euclidean spaces as follows:
Algorithm 2. Choose,
,
. Letbe a point in. For, letwhereandis the smallest nonnegative integer such that In 2012, Bnouhachem et al. [
9] proposed the following projection method for solving the SFP.
Algorithm 3. For a given, letwheresatisfies Recently, many authors establish weak and strong convergence theorems for the SFP (see also [
10,
11]).
In this work, combining the work of Bnouhachem et al. [
9] and López et al. [
7], we suggest a new hybrid CQ algorithm for solving the split feasibility problem and establish weak convergence theorem in Hilbert spaces. Finally, numerical results are given for supporting our main results. The comparison is also given to algorithms of Qu and Xiu [
8] and Bnouhachem et al. [
9]. It is shown that our method has a better convergence behavior than these CQ algorithms through numerical examples.
2. Preliminaries
We next recall some useful basic concepts that will be used in our proof. Let
H be a real Hilbert space equipped with the inner product
and the norm
. Let
be a nonlinear mapping. Then,
T is called
firmly nonexpansive if, for all
,
In a real Hilbert space
H, we have the following equality:
A function
is convex if and only if
for all
.
A function
is said to be
weakly lower semi-continuous (w-lsc) at
x if
implies
The projection of a nonempty, closed and convex set
C onto
H is defined by
We note that
and
are firmly nonexpansive. From [
5], we know that, if
then
is
-Lipschitz continuous. Moreover, in real Hilbert spaces, we know that [
12]
- (i)
for all ;
- (ii)
for all ; and
- (iii)
for all .
Lemma 1. [12] Let S be a nonempty, closed and convex subset of a real Hilbert space H and be a sequence in H that satisfies the following assumptions: - (i)
exists for each ; and
- (ii)
.
Then, converges weakly to a point in S.
3. Main Results
Throughout this paper, let S be the set of solution of SFP and suppose that S is nonempty. Let C and Q be nonempty that satisfy the following assumptions:
(A1) The set
C is defined by
where
is convex, subdifferentiable on
C and bounded on bounded sets, and the set
Q is defined by
where
is convex, subdifferentiable on
Q and bounded on bounded sets.
(A2) For each
, at least one subgradient
can be computed, where
(A3) For each
, at least one subgradient
can be computed, where
Next, we propose our new relaxed CQ algorithm in real Hilbert spaces.
Algorithm 4. Let, for any,
. Assumeandhave been constructed. Computevia the formulawhereandis the smallest nonnegative integer such that Lemma 2. [8] The line-search in Equation (27) terminates after a finite number of steps. In addition, we have the following:for all , where . Next, we state our main theorem in this paper.
Theorem 1. Assume that and satisfy the assumptions:
- (a1)
; and
- (a2)
.
Then, defined by Algorithm 4 converges weakly to a solution of the SFP.
Proof. Let
. Then, we have
and
. It follows that
. We see that
Since
is firmly nonexpansive and
, we get
From Equation (
19), we see that
From Equations (
33) and (
34), we obtain
Combining Equations (
31), (
32) and (
35), we get
where the last inequality follows from Lemma 2. Since
and
, it follows that
Thus,
exists and hence
is bounded.
From Equation (
36) and Assumption (A2), it also follows that
By Assumption (A1), we have
From Equation (
36), we have
Using Equations (
40) and (
42), we have
Let
be a cluster point of
with
converging to
. From Equation (
42), we see that
also converges to
. We next show that
is in
S. Since
, by the definition of
, we have
where
. By the assumption that
is bounded and Equation (
42), we get
which implies
. Hence
. Since
, we obtain
where
. By the boundedness of
and Equation (
43), it follows that
We conclude that . Thus, . Thus, is a solution of the SFP.
Hence, by Lemma 1, we conclude that the sequence converges to a point in S. This completes the proof. □
4. Numerical Experiments
In this section, we provide numerical experiments in compressed sensing. We illustrate the performance of Algorithms 4 and 1 of Yang [
6], Algorithm 2 of Qu and Xiu [
8], and Algorithm 3 of Bnouhuchem et al. [
9]. In signal processing, compressed sensing can be modeled as the following linear equation:
where
is a recovered vector with
m nonzero components,
is the observed data,
is the noisy and
A is an
matrix with
. The problem in Equation (
48) can be seen as the LASSO problem:
where
is a given constant. In particular, if
and
, then the LASSO problem can be considered as the SFP. From this connection, we can apply the CQ algorithm to solve Equation (
49).
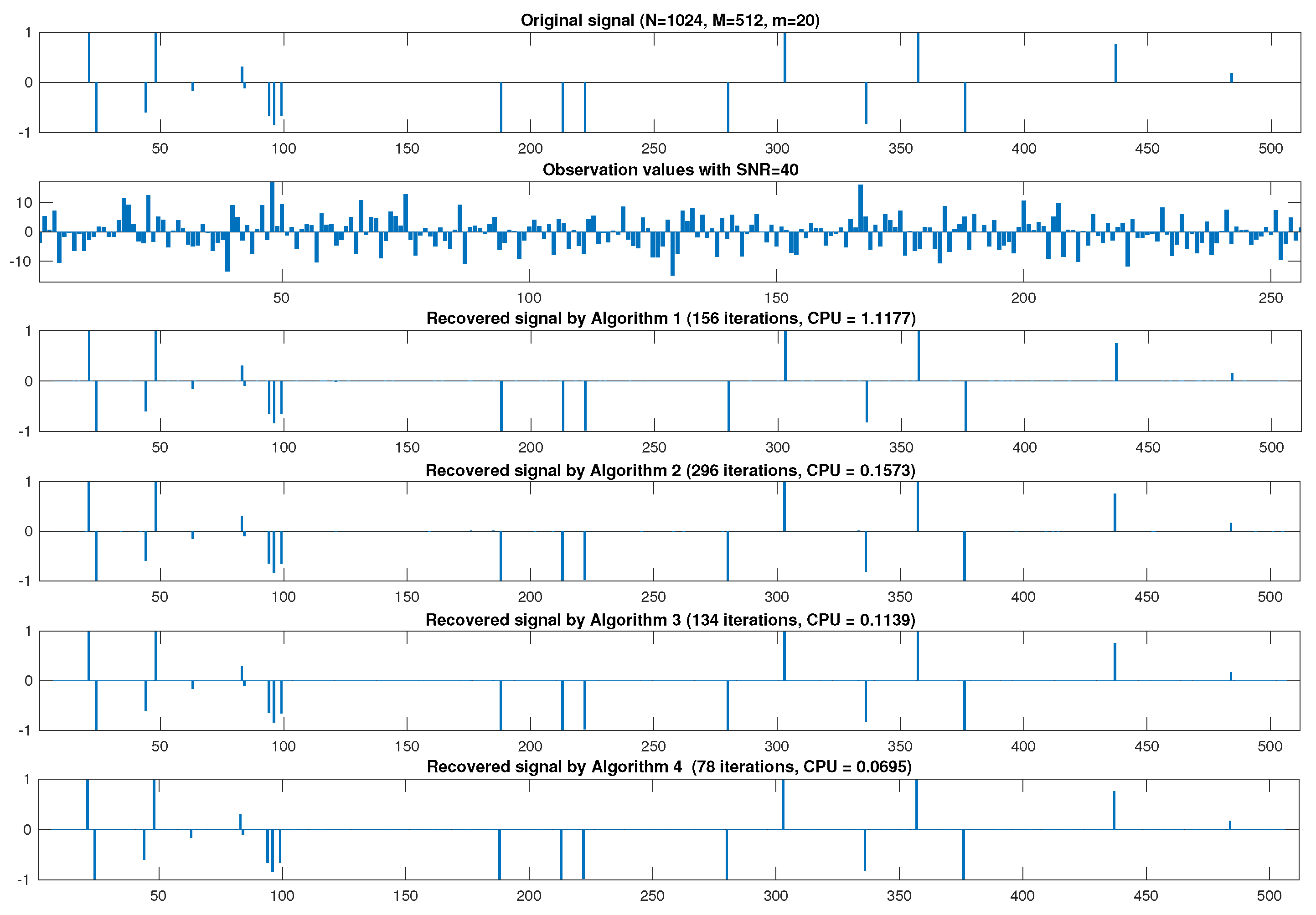
In this example, the sparse vector is generated by the uniform distribution in with m nonzero elements. The matrix A is generated by the normal distribution with mean zero and invariance one. The observation y is generated by the white Gaussian noise with SNR=40. The process is started with and initial point .
The stopping criterion is defined by the mean square error (MSE):
where
is an estimated signal of
and
is a tolerance.
In what follows, let , , , and . The numerical results are reported as follows.
In
Table 1, we observe that the performance of Algorithm 4 is better than other algorithms in terms of CPU time and number of iterations as the spikes of sparse vector is varied from 10 to 30. In this example, it is shown that Algorithm 4 of Yang [
6], for which the step size depends on the norm of
A, converges more slowly than other algorithms in terms of CPU time.
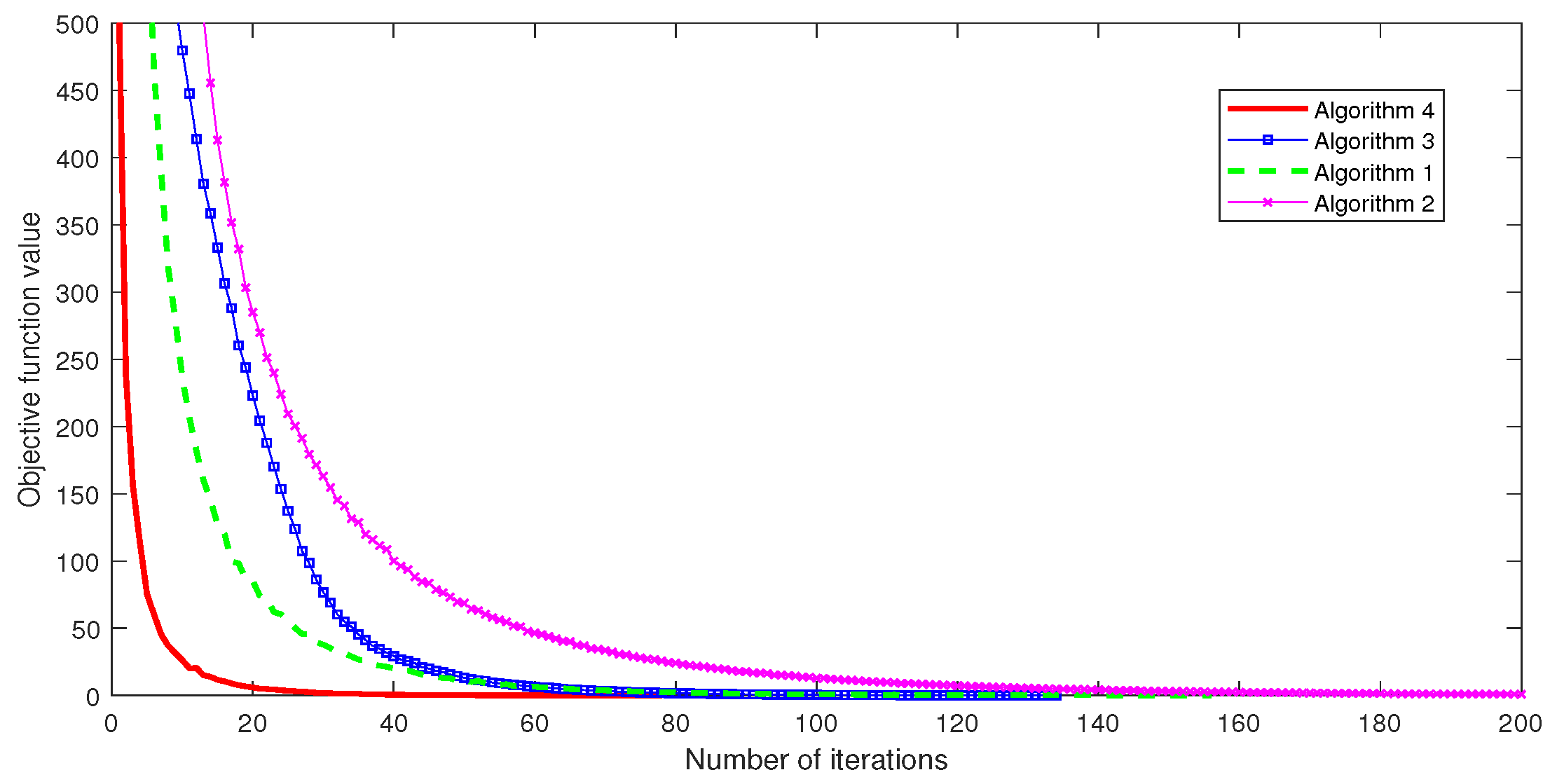
Next, we provide
Figure 1,
Figure 2 and
Figure 3 to illustrate the convergence behavior, MSE, number of iterations and objective function values when
,
,
and
.
In
Figure 1,
Figure 2 and
Figure 3, we can summarize that our proposed algorithm is really more efficient and faster than algorithms of Yang [
6], Qu and Xiu [
8] and Bnouhachem et al. [
9].
In
Table 2, we observe that Algorithm 4 is effective and also converges more quickly than Algorithm 1 of Yang [
6], Algorithm 2 of Qu and Xiu [
8] and Algorithm 3 of Bnouhuchem et al. [
9]. Moreover, it is seen that Algorithm 1 of Yang [
6] has the highest CPU time in computation. In this case, Algorithm 1 takes more CPU time than it does in the first case (see
Table 1). Therefore, we can conclude that our proposed method has the advantage in comparison to other methods, especially Algorithm 1, which requires the spectral computation.
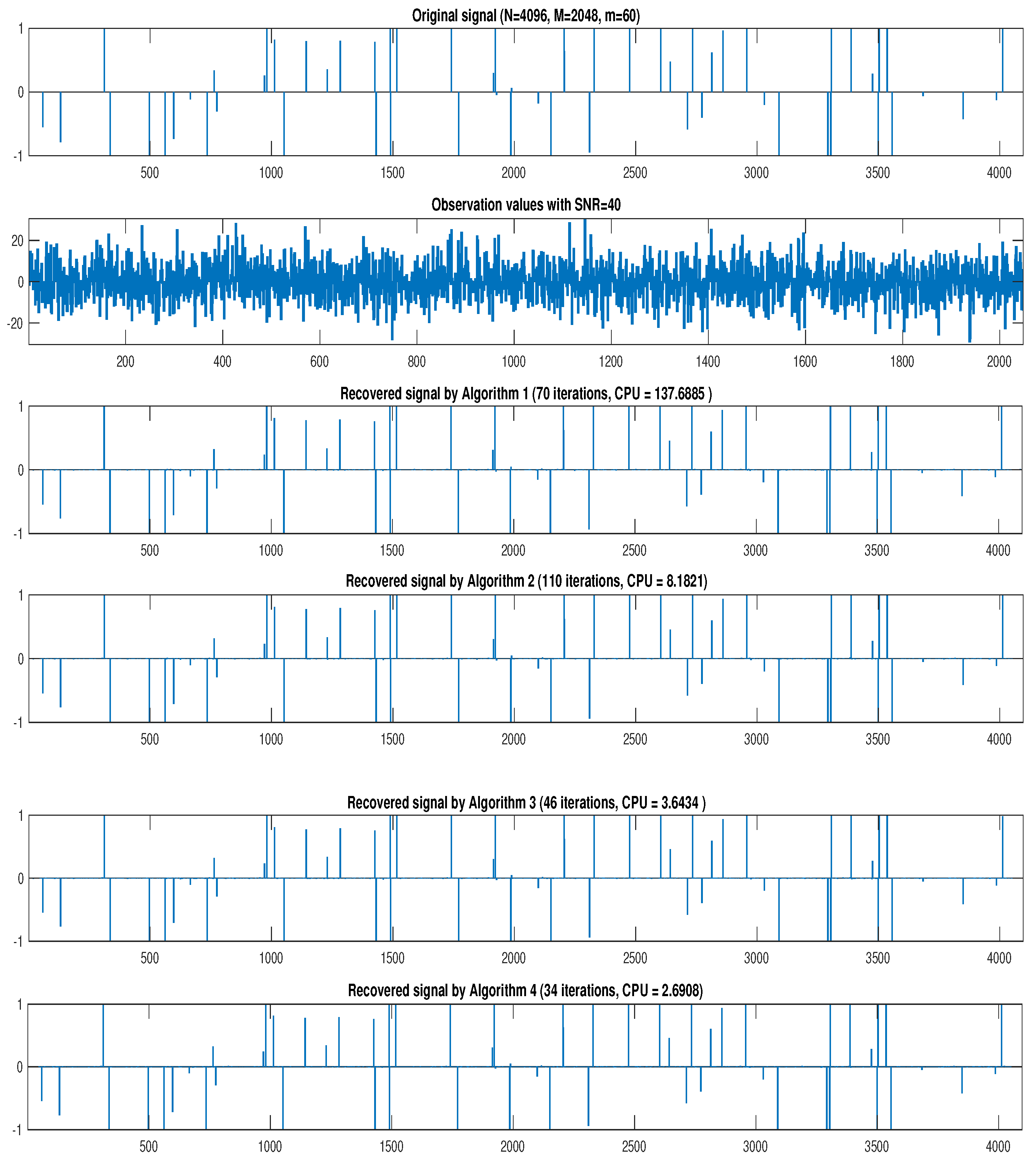
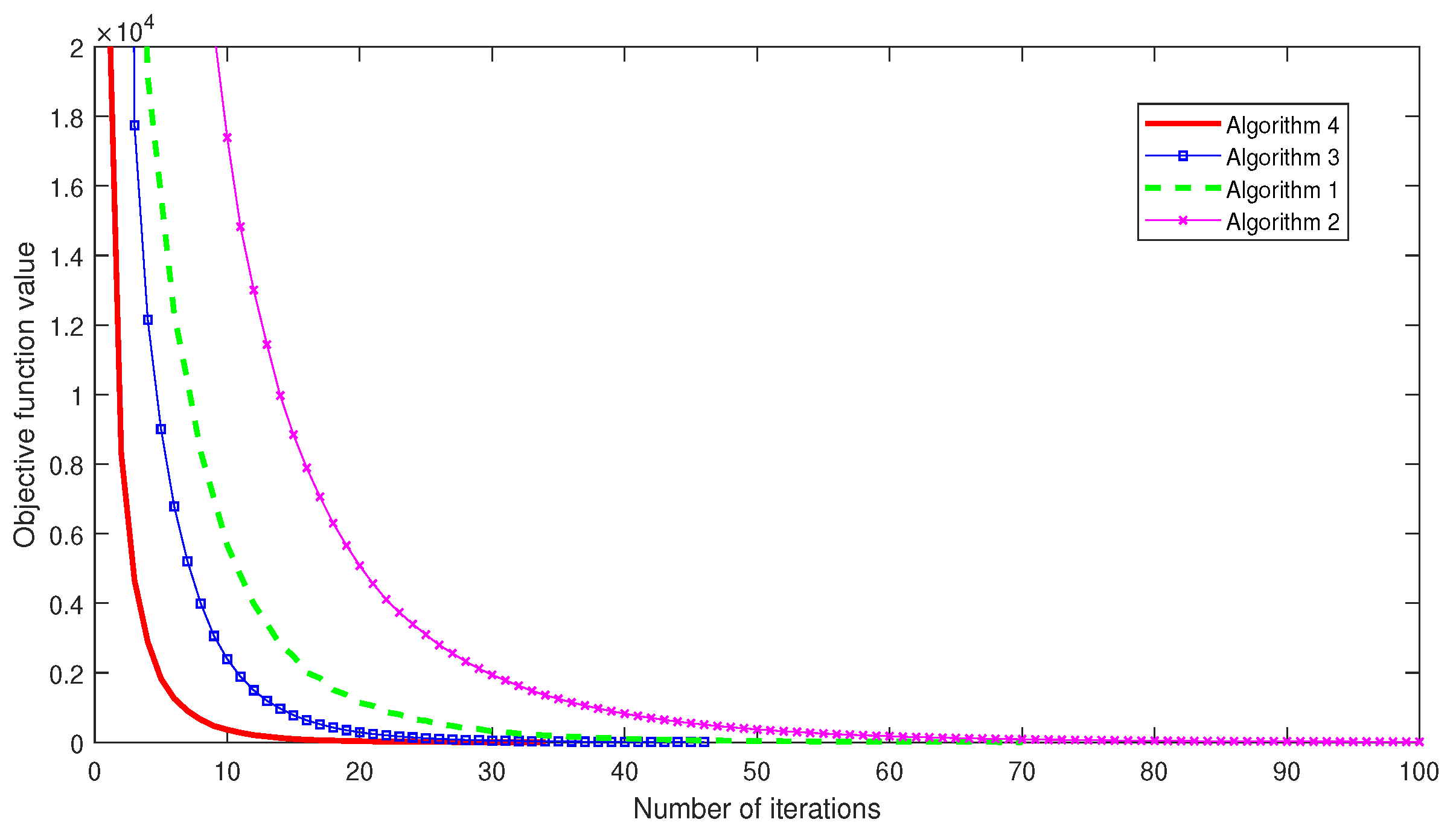
We next provide
Figure 4,
Figure 5 and
Figure 6 to illustrate the convergence behavior, MSE, number of iterations and objective function values when
,
,
and
.
In
Figure 4,
Figure 5 and
Figure 6, we observe that MSE and objective function values of Algorithm 4 decreases faster than Algorithms 1–3 do in each cases.
5. Comparative Analysis
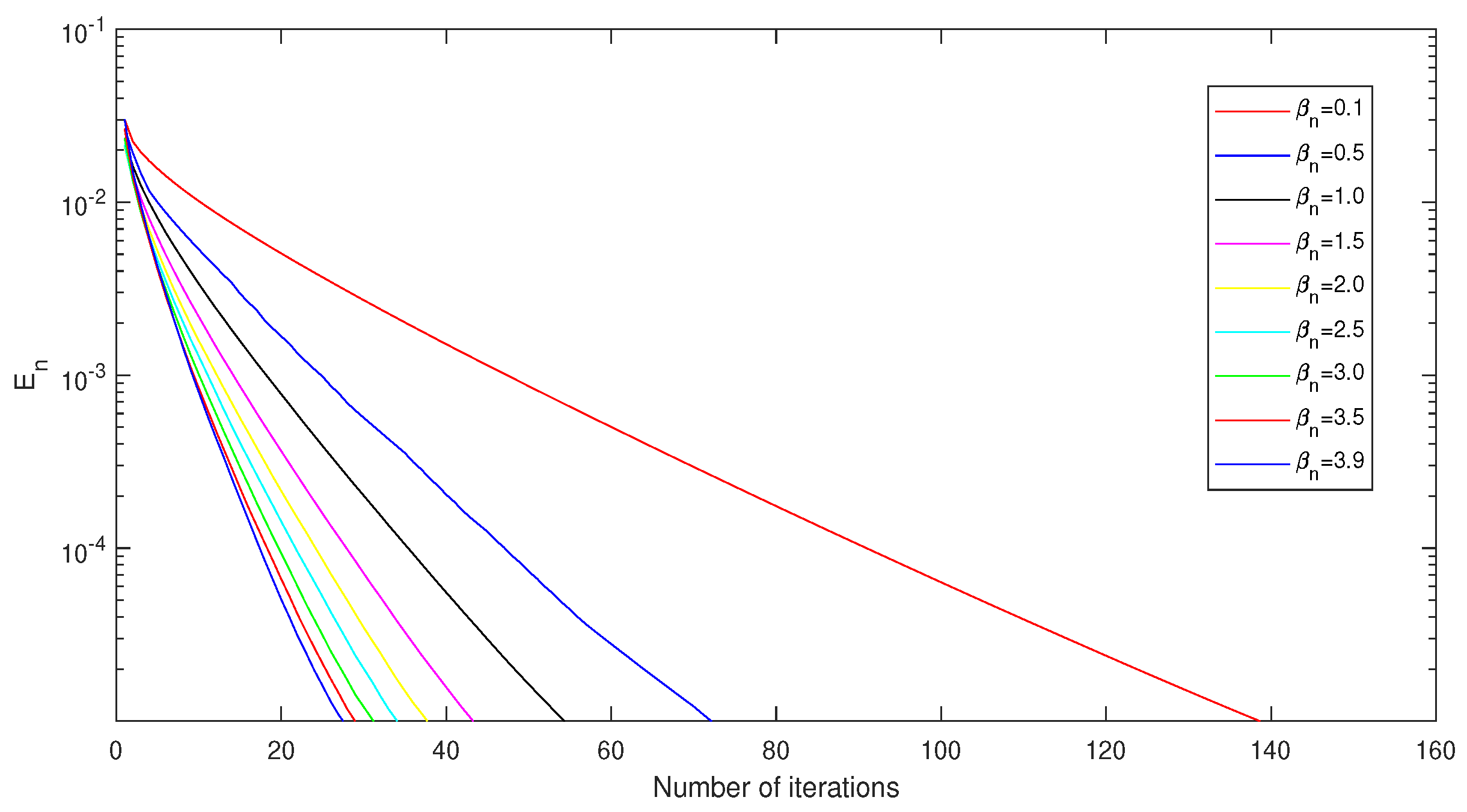
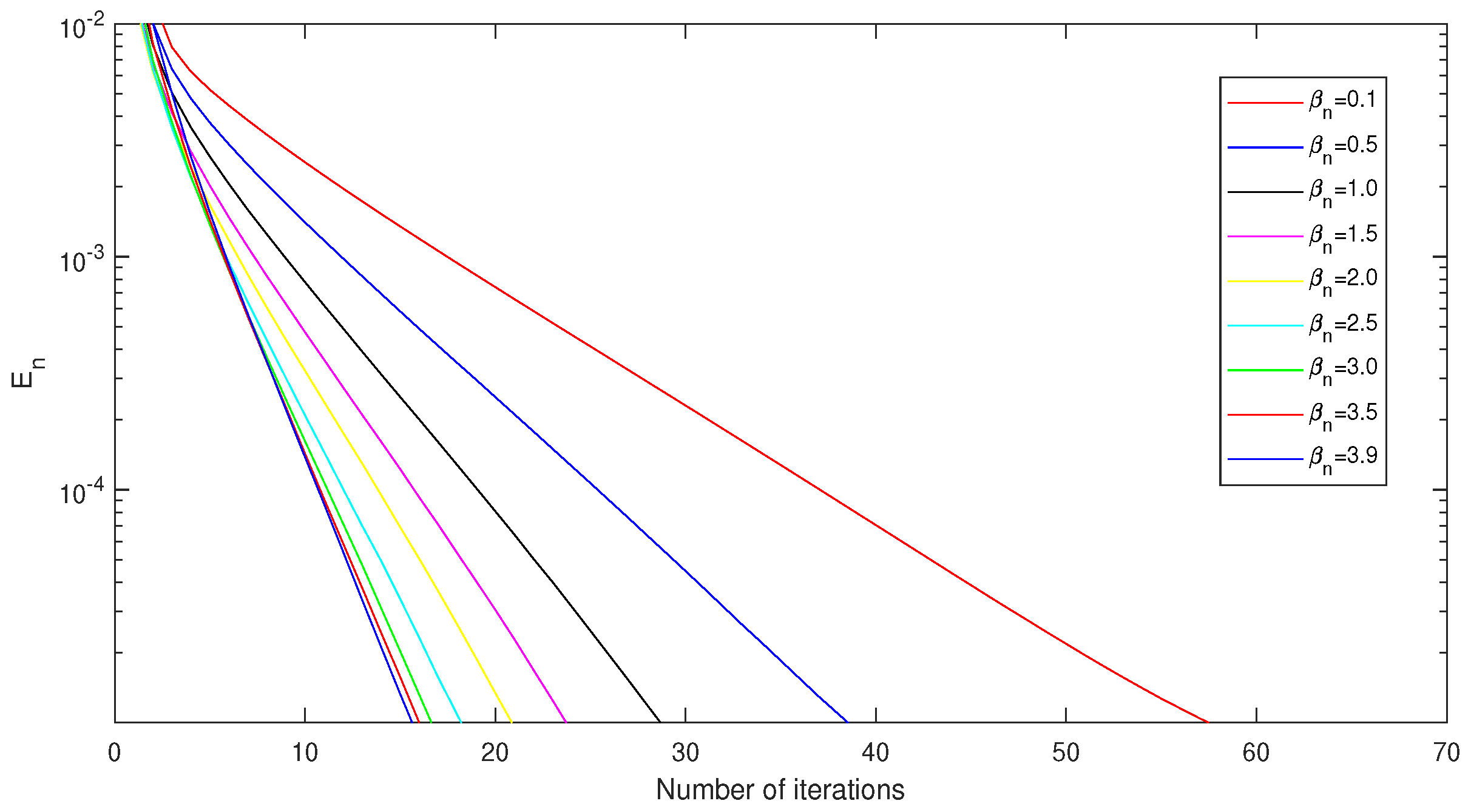
In this section, we discuss the comparative analysis to show the effects of the step sizes and in Algorithm 4.
We begin this section by studying the effect of the step size in Algorithm 4 in terms of the number of iterations and the CPU time with the varied cases.
Choose
,
,
and
. Let
and
A be as in the previous example. The stopping criterion is defined by Equation (
50) with
.
In
Table 3, it is observed that the number of iterations and the CPU time have small reduction when the step size
tends to 4. The numerical experiments for each cases of
are shown in
Figure 7 and
Figure 8, respectively.
Next, we discuss the effect of the step size in Algorithm 4. We note that the step size depends on the parameters and . Thus, we aim to vary these parameters and study its convergence behavior.
Choose
,
,
and
. Let
and
A be as in the previous example. The stopping criterion is defined by Equation (
50) with
. The numerical results are reported in
Table 4.
In
Table 4, we see that the CPU time decreases significantly when the parameter
is also decreased. However, the choice of
has no effect in terms of number of iterations.
Next, we discuss the effect of
in Algorithm 4. In this experiment, choose
,
,
and
. The error
is defined by Equation (
50) with
. The numerical results are reported in
Table 5.
In
Table 5, we observe that the choices of
have a small effect in both terms of the CPU time and the number of iterations.
Finally, we discuss the convergence of Algorithm 4 with different cases of
M and
N. In this case, we set
,
,
,
and
. The stopping criterion is defined by Equation (
50).
In
Table 6, it is shown that, if
M and
N have a high value, then the number of iteration decreases. However, in this case, the CPU time increases.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}