Modeling and Control of IPMC Actuators Based on LSSVM-NARX Paradigm

Abstract
:1. Introduction
1.1. Modeling
1.2. Control
2. Testing of Hysteresis Characteristics of the IPMC Actuator
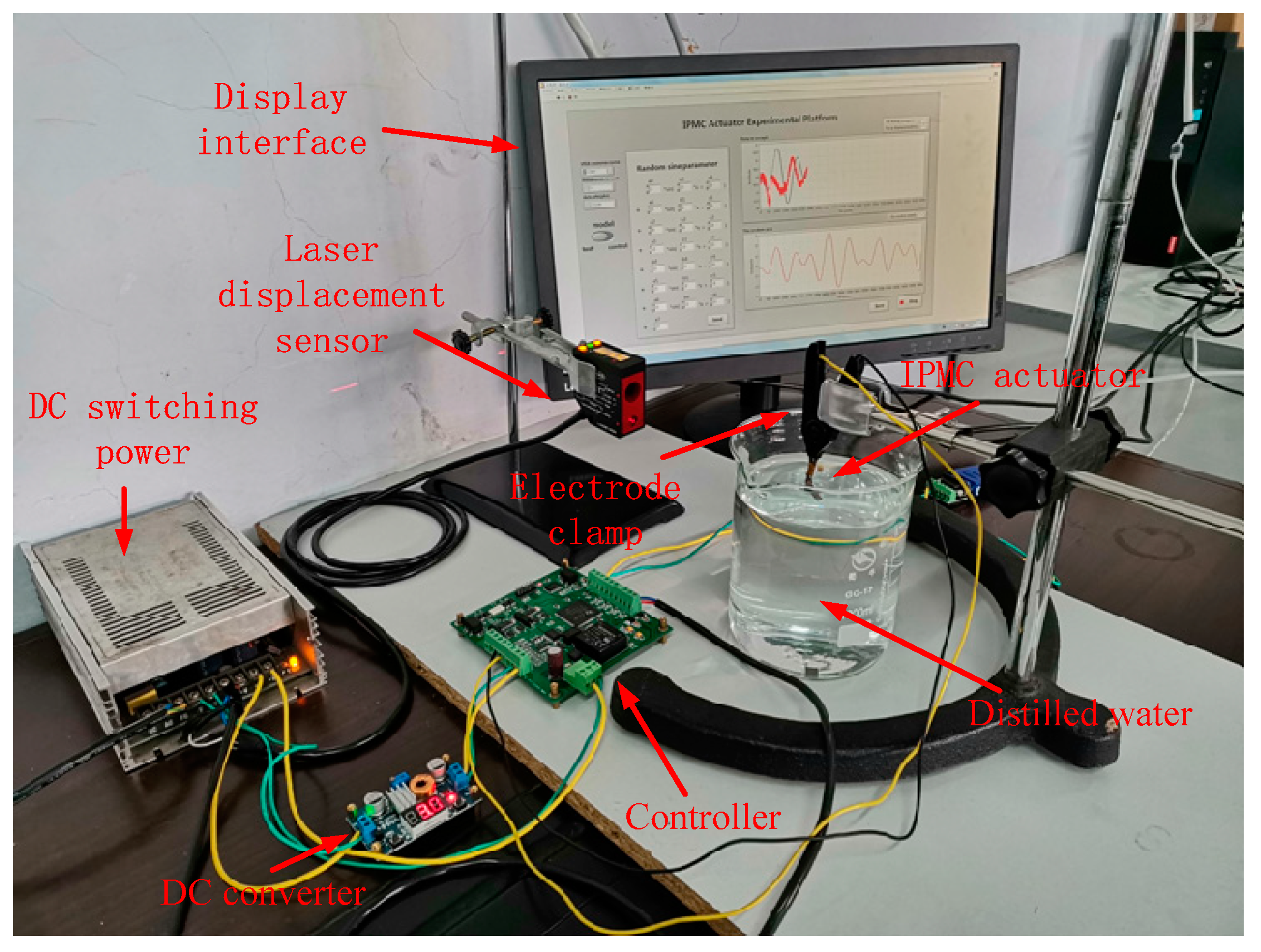
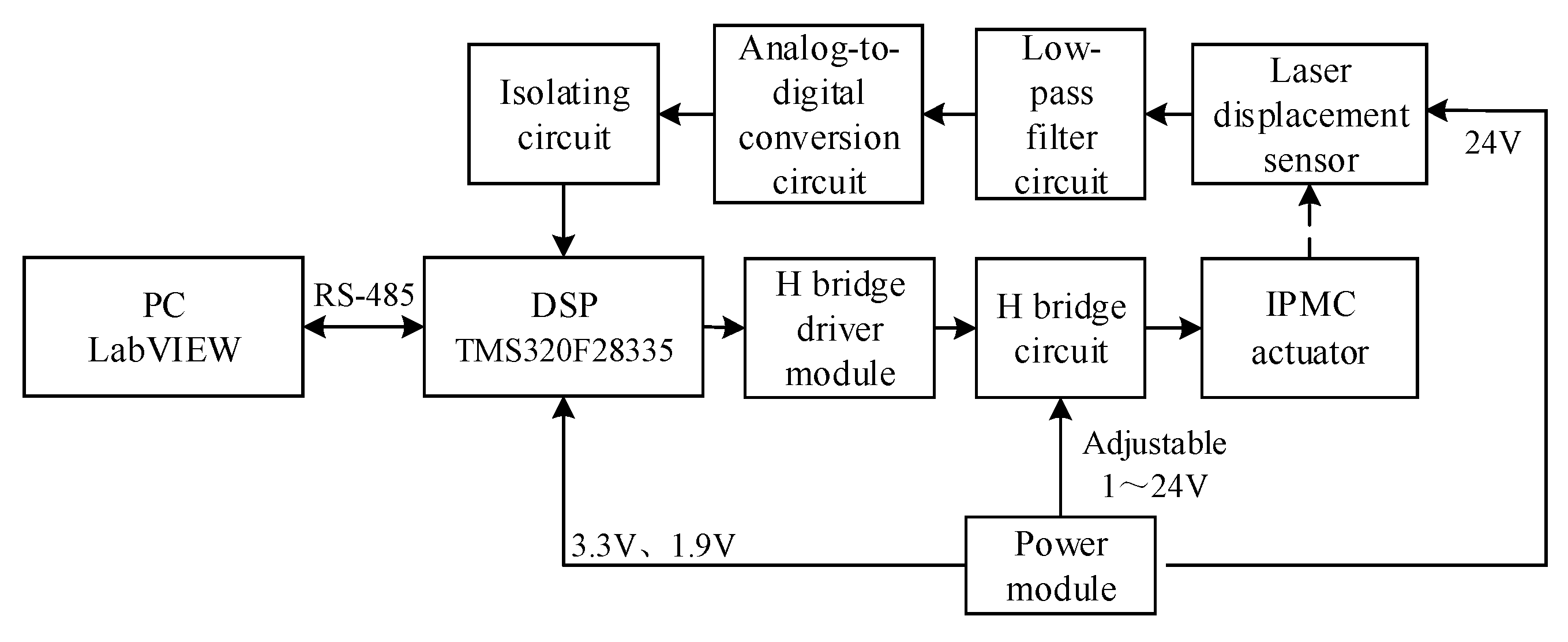
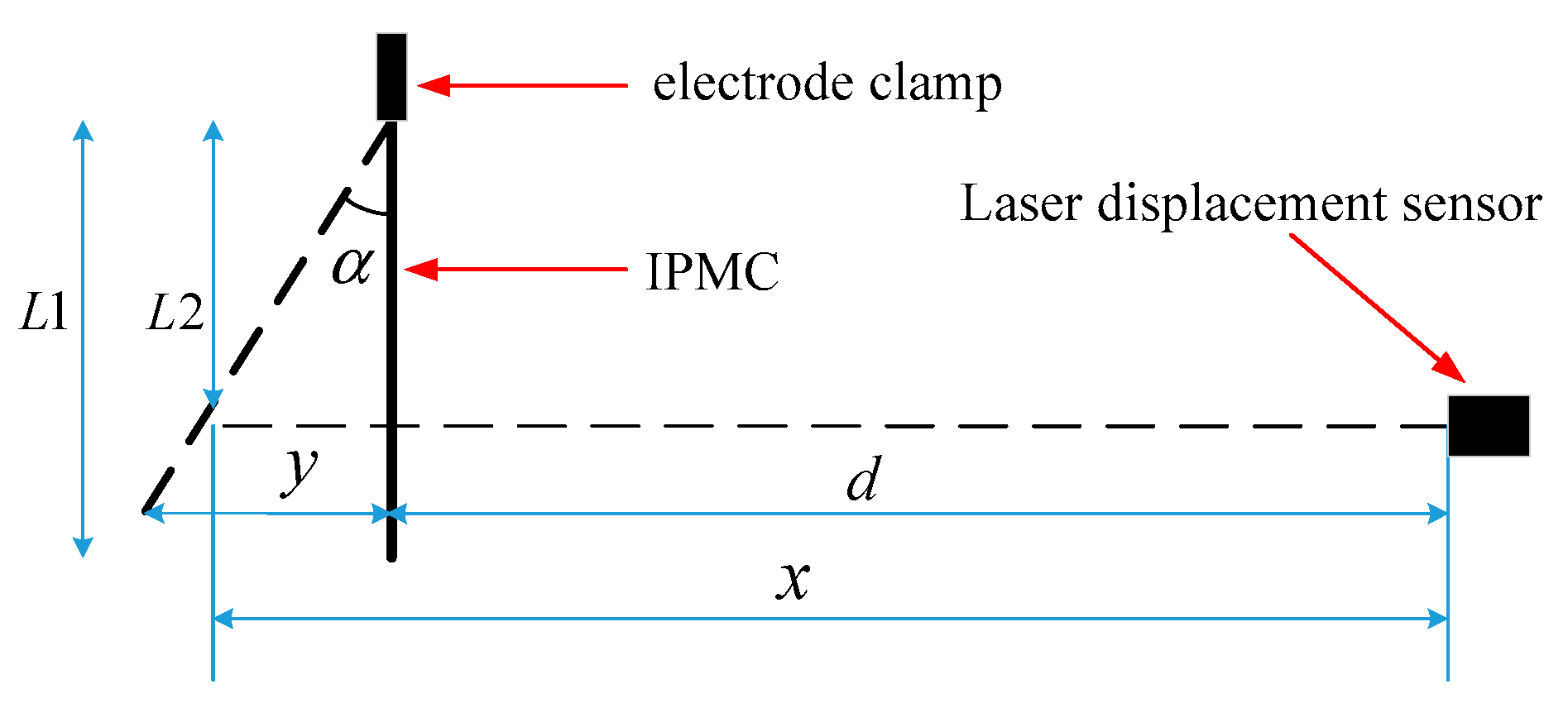
2.1. Testing Platform
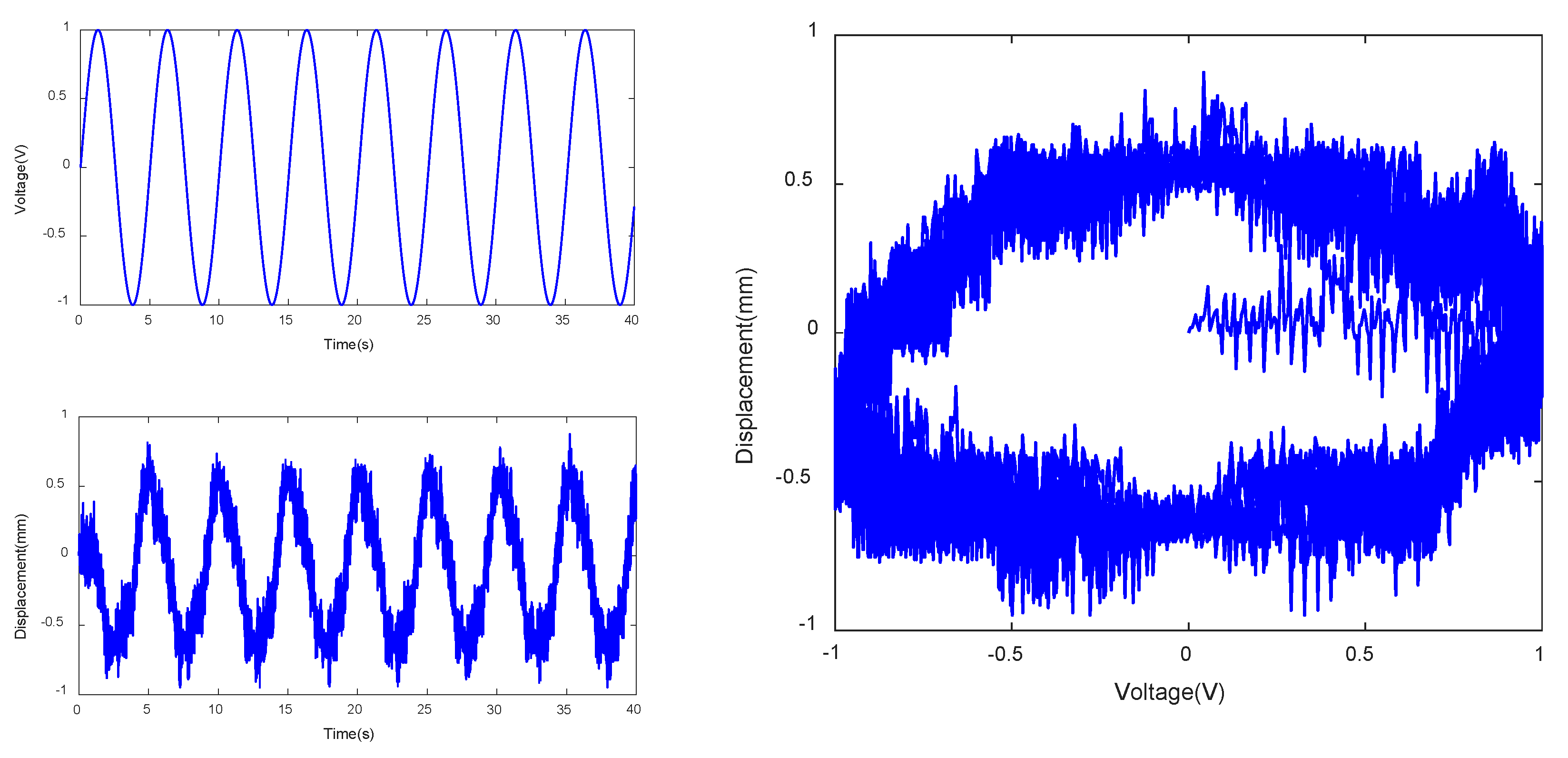
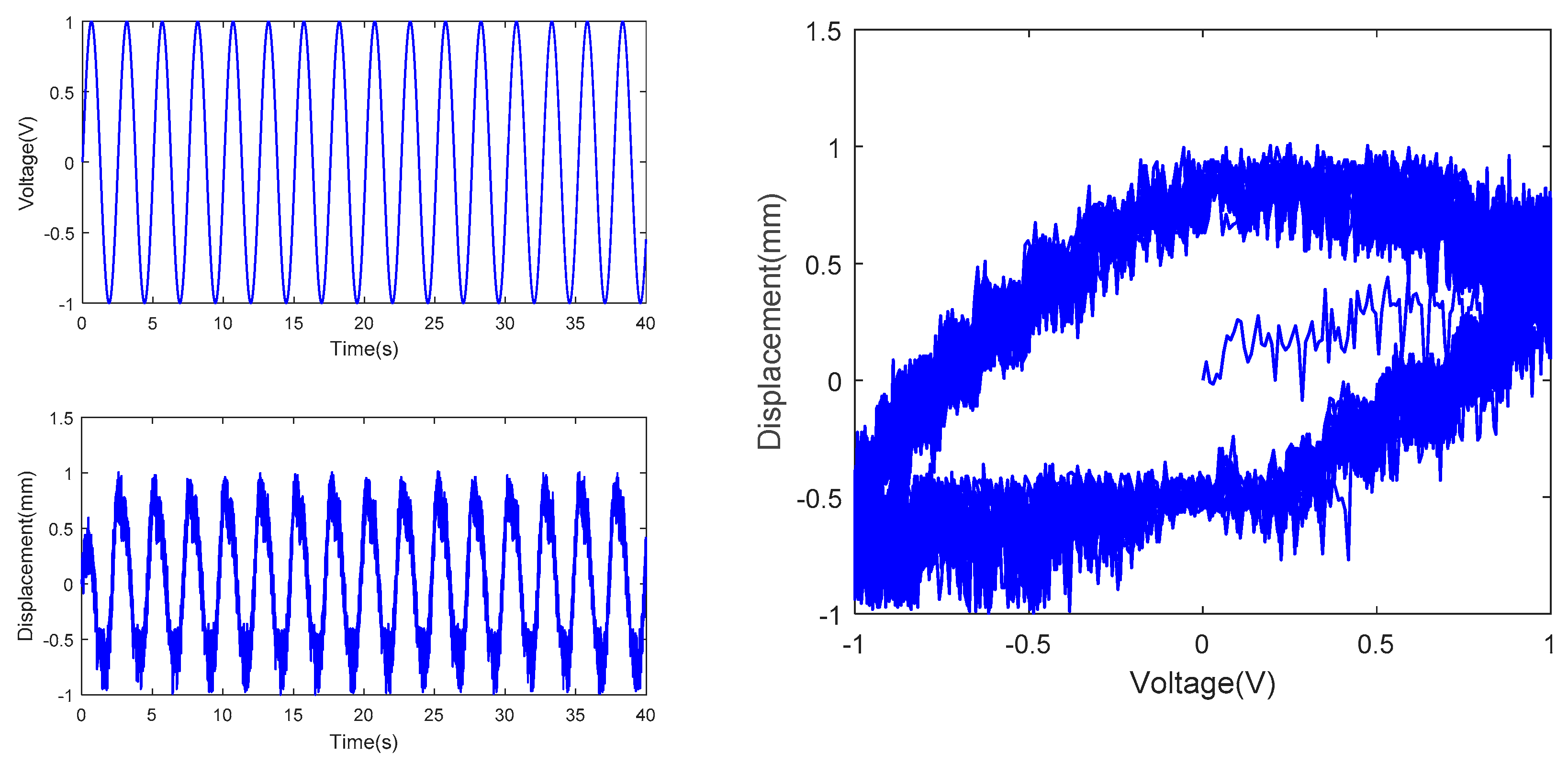
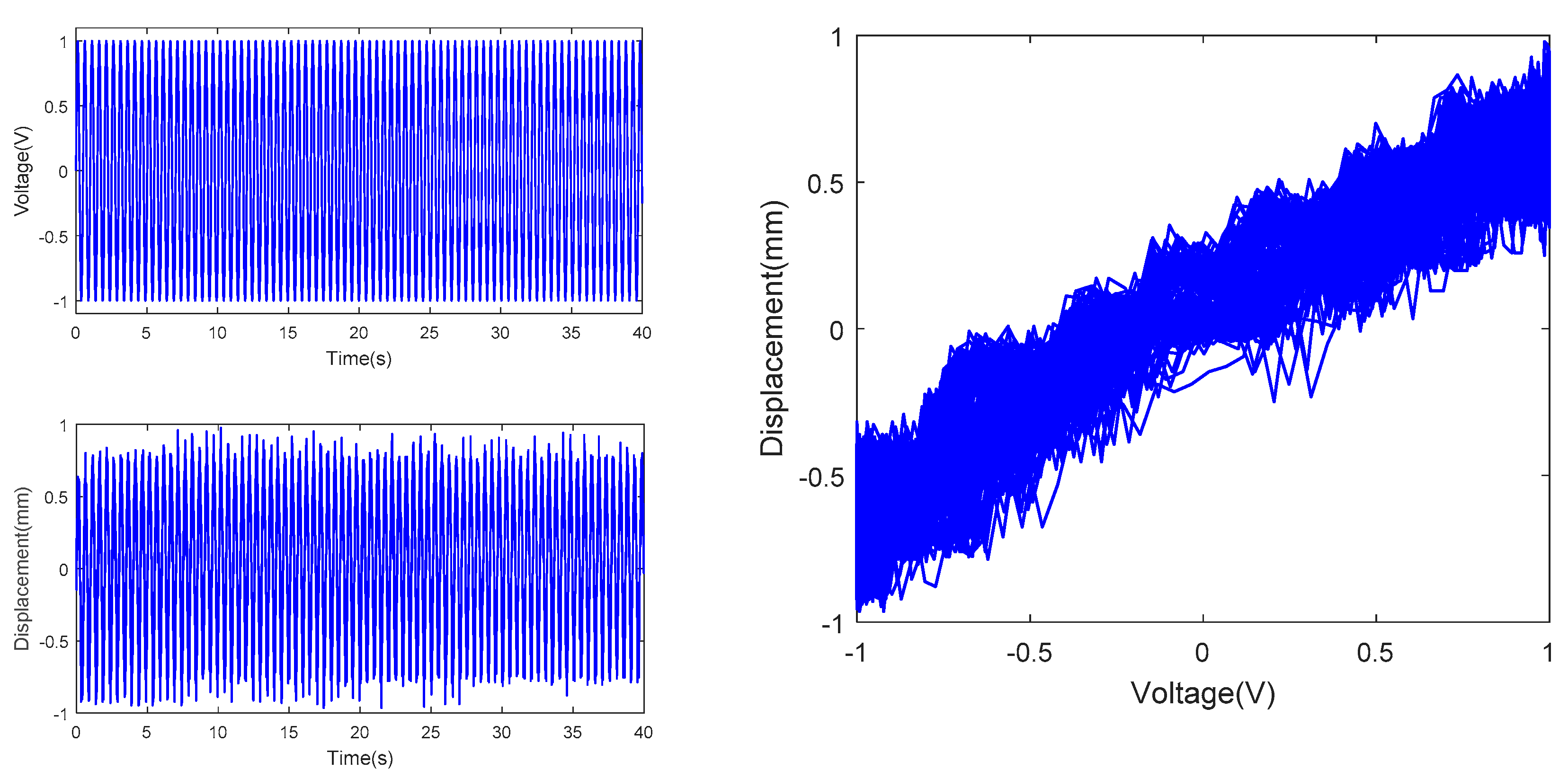
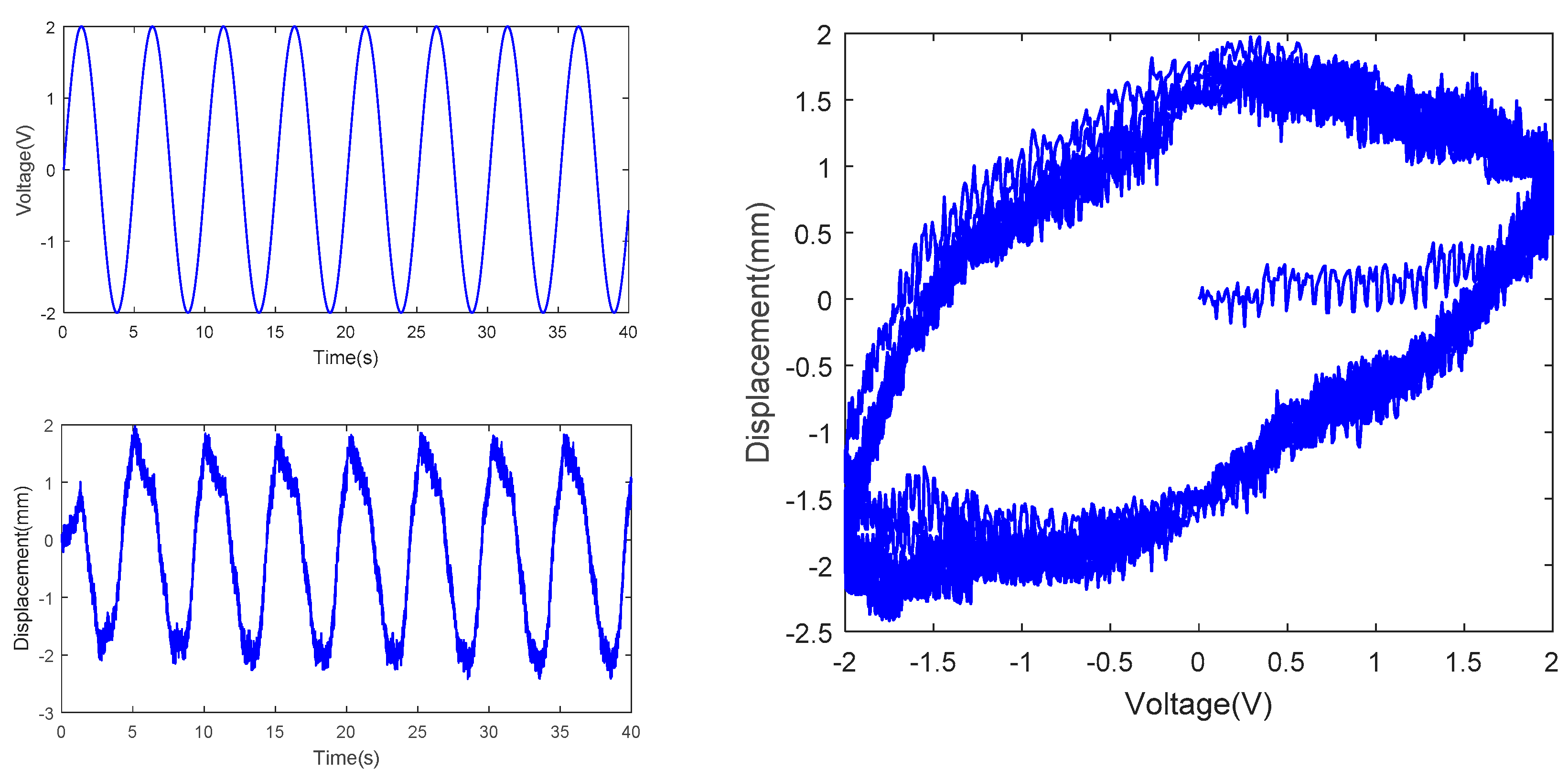
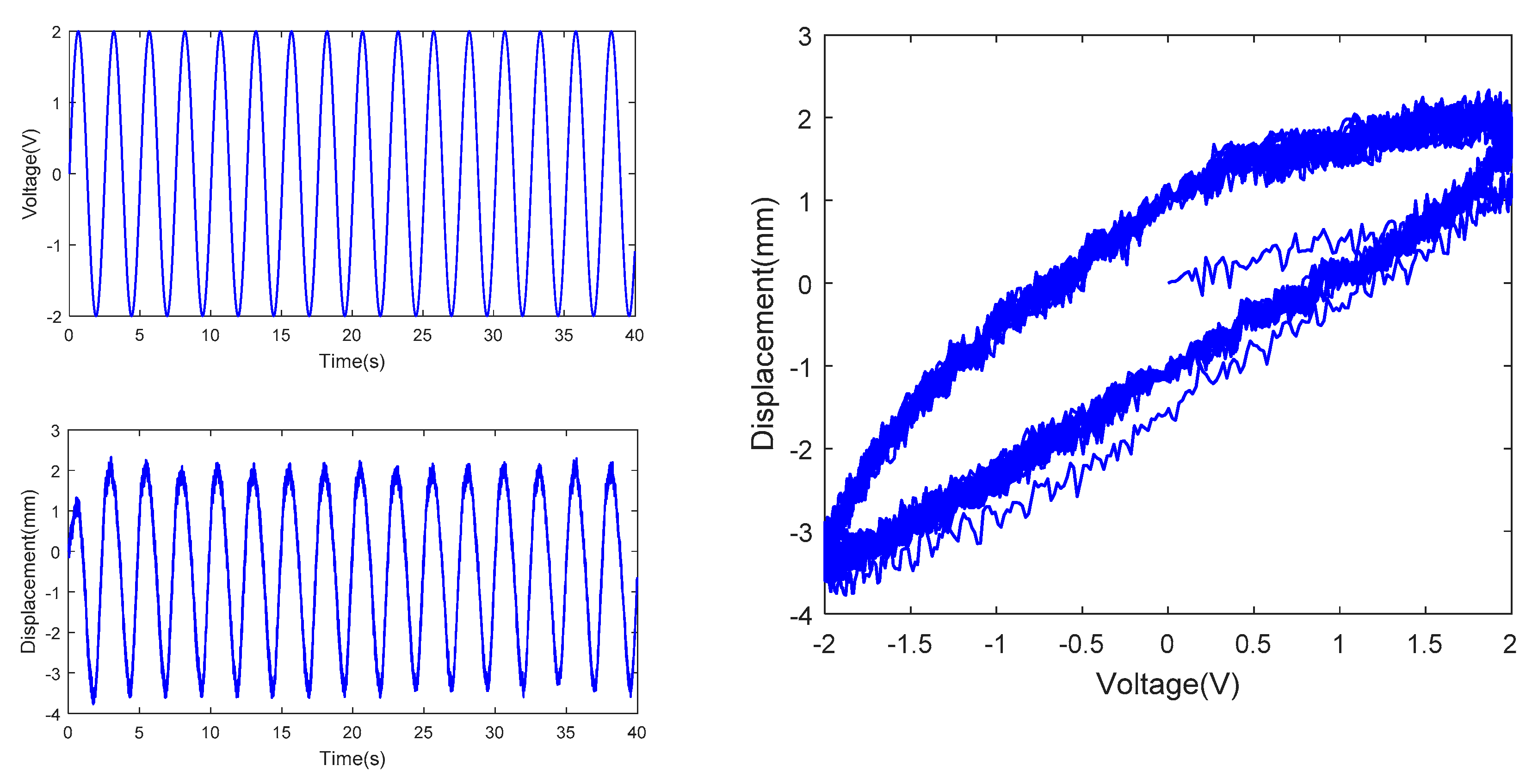
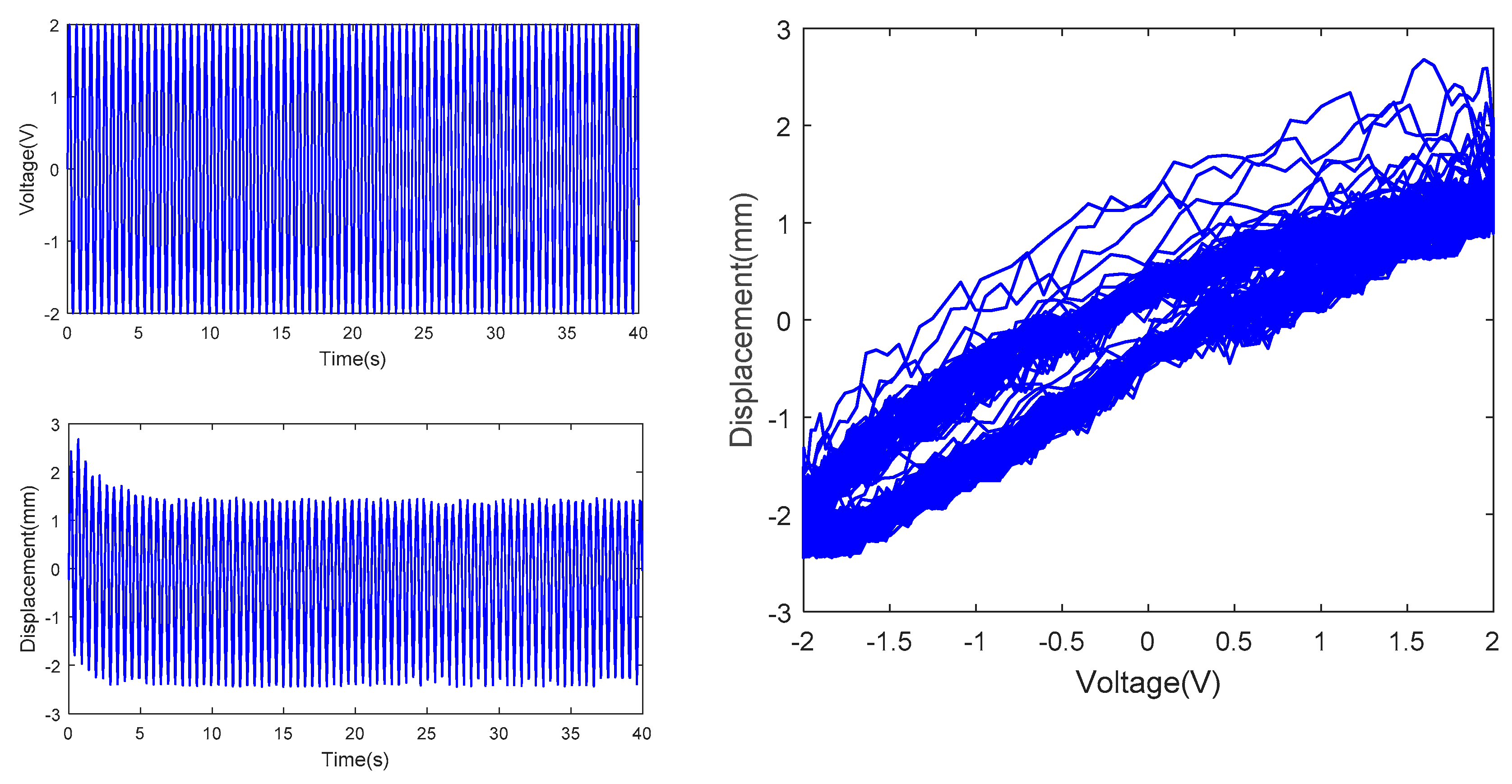
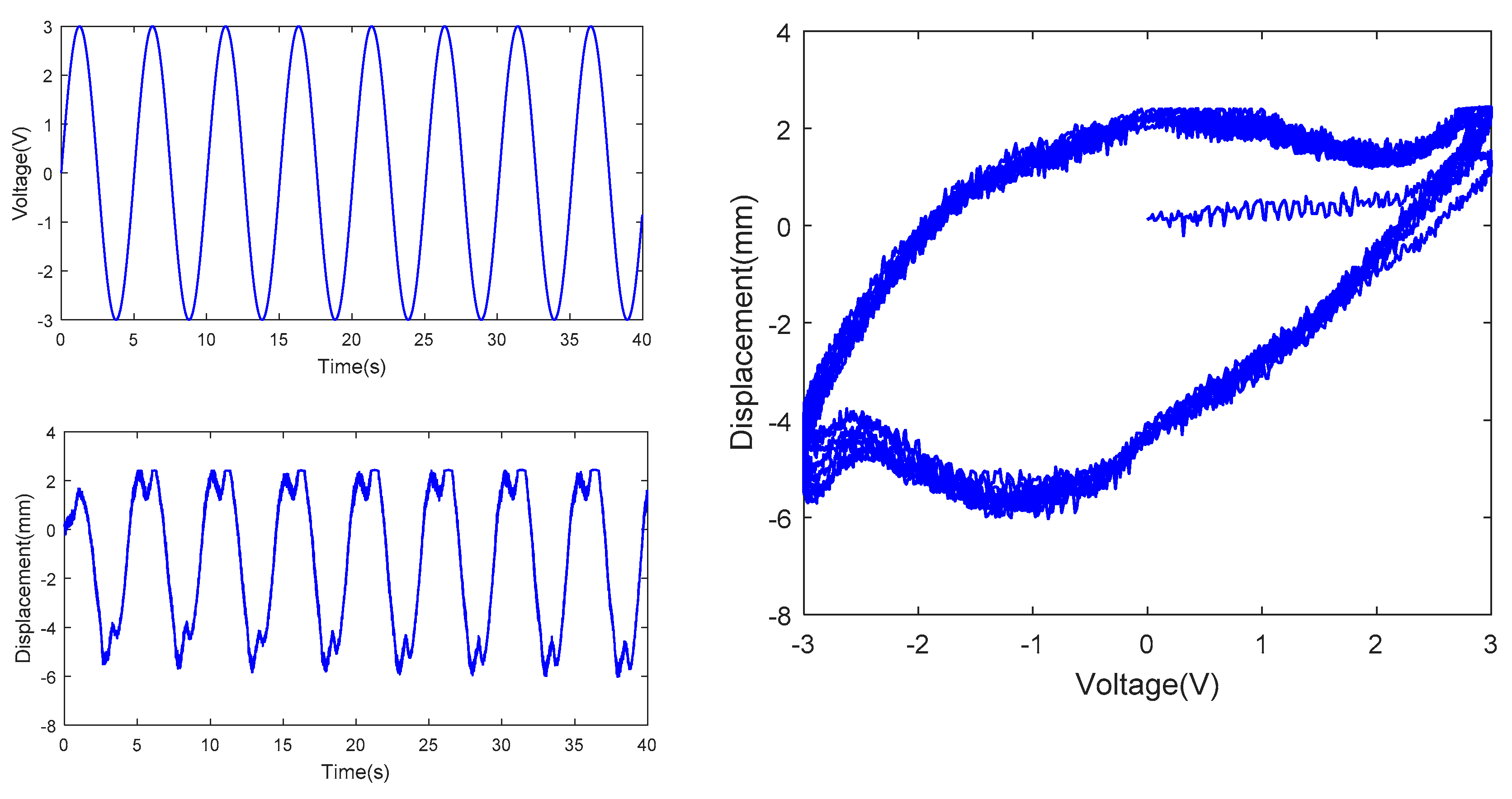
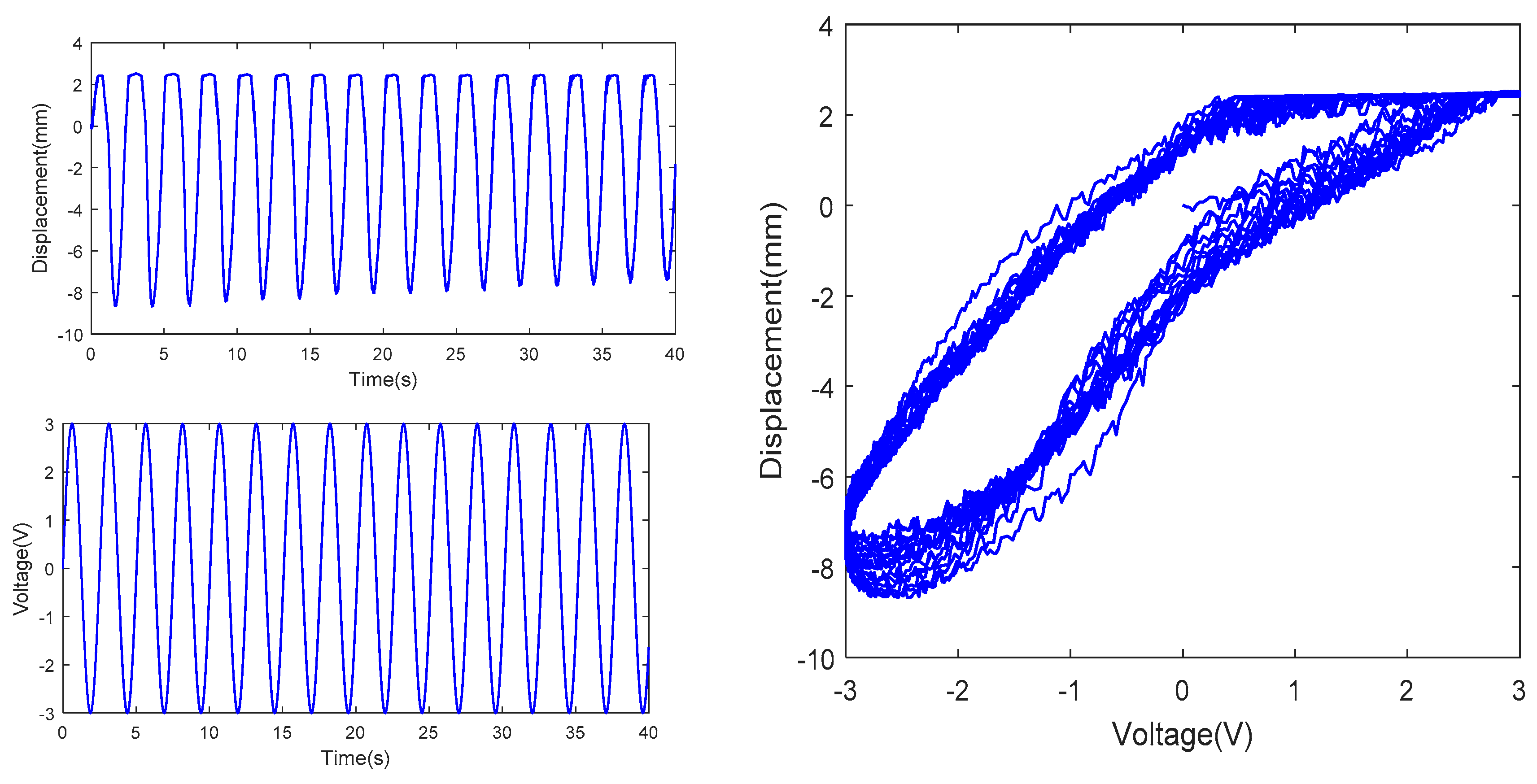
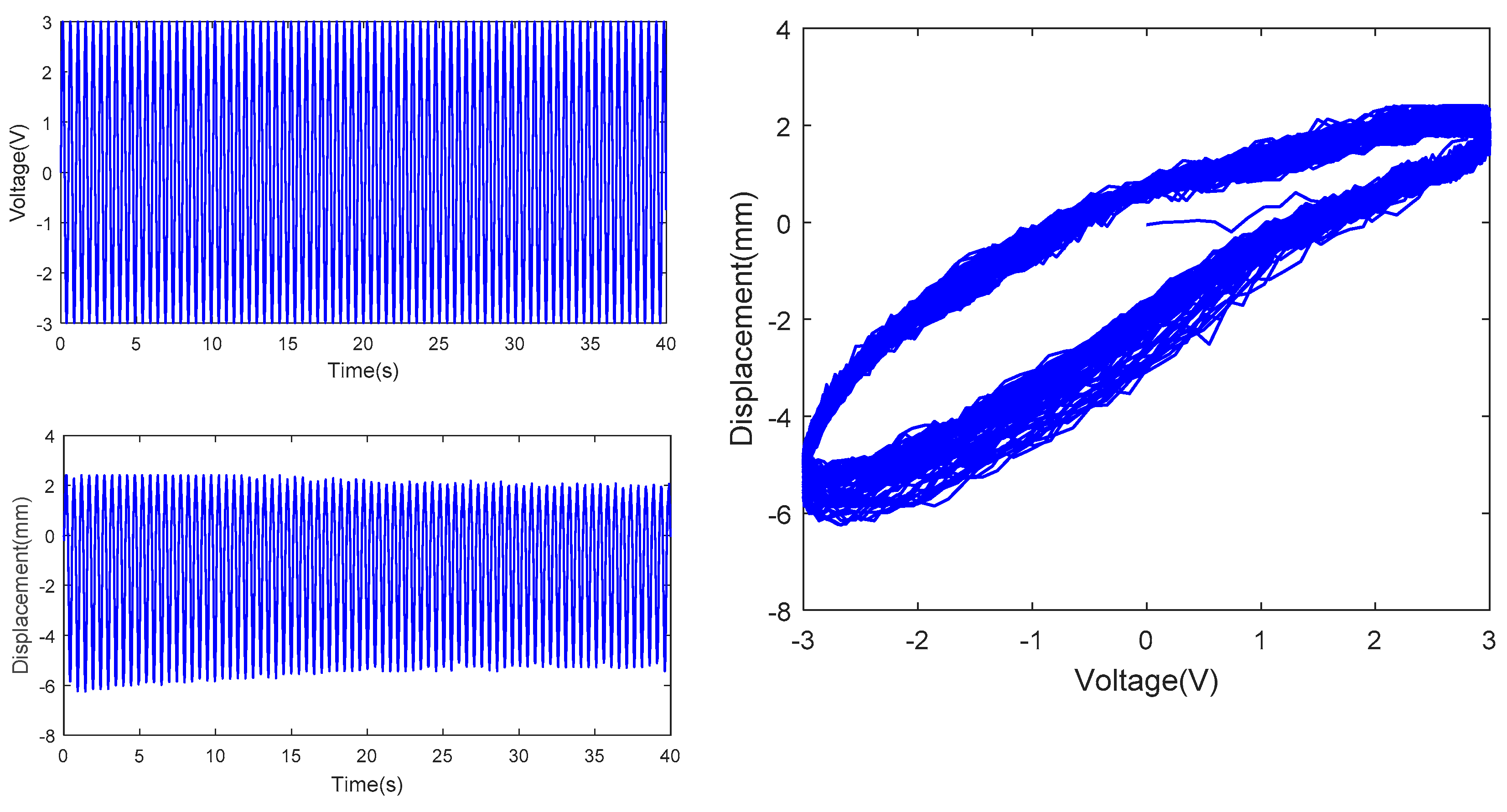
2.2. Testing of Hysteresis Characteristics
3. Modeling of IPMC Actuator Based on Hysteresis Characteristics
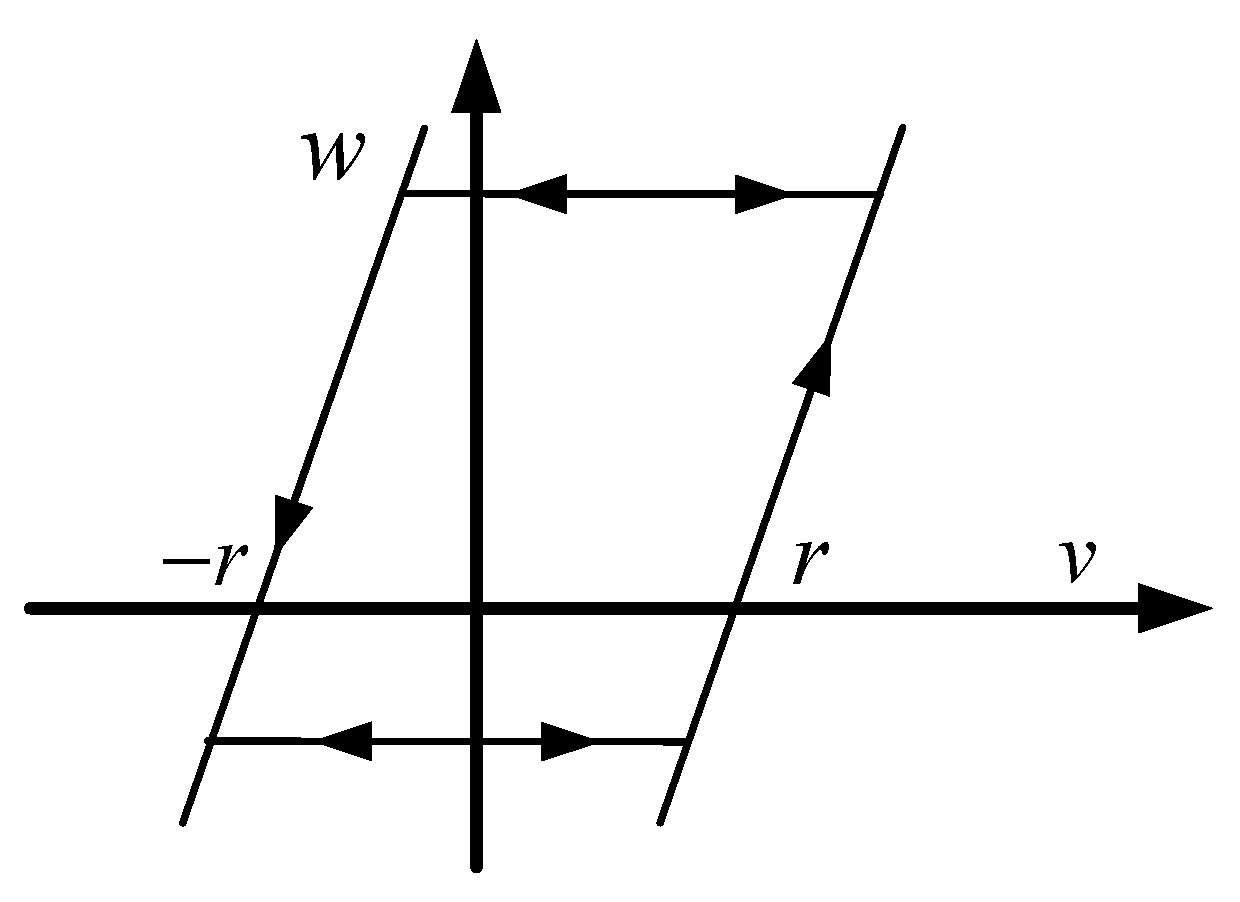
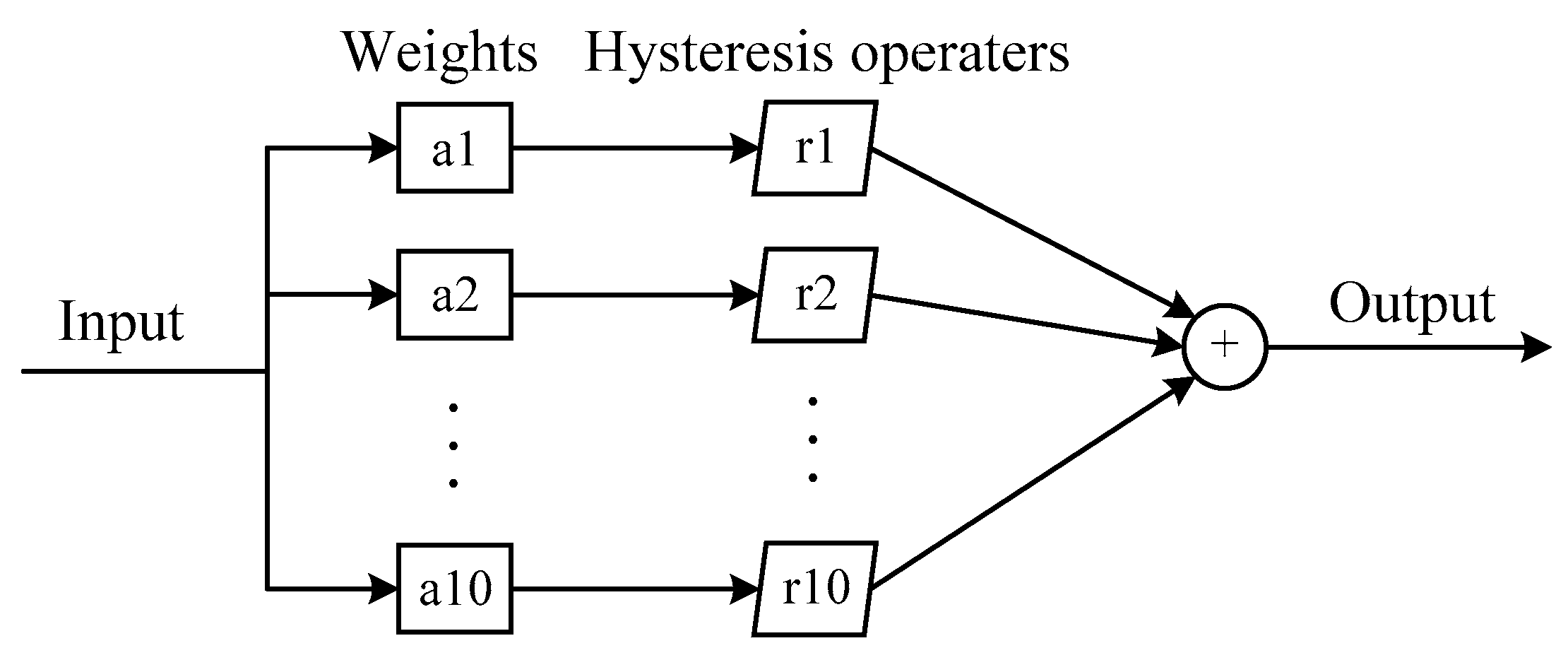
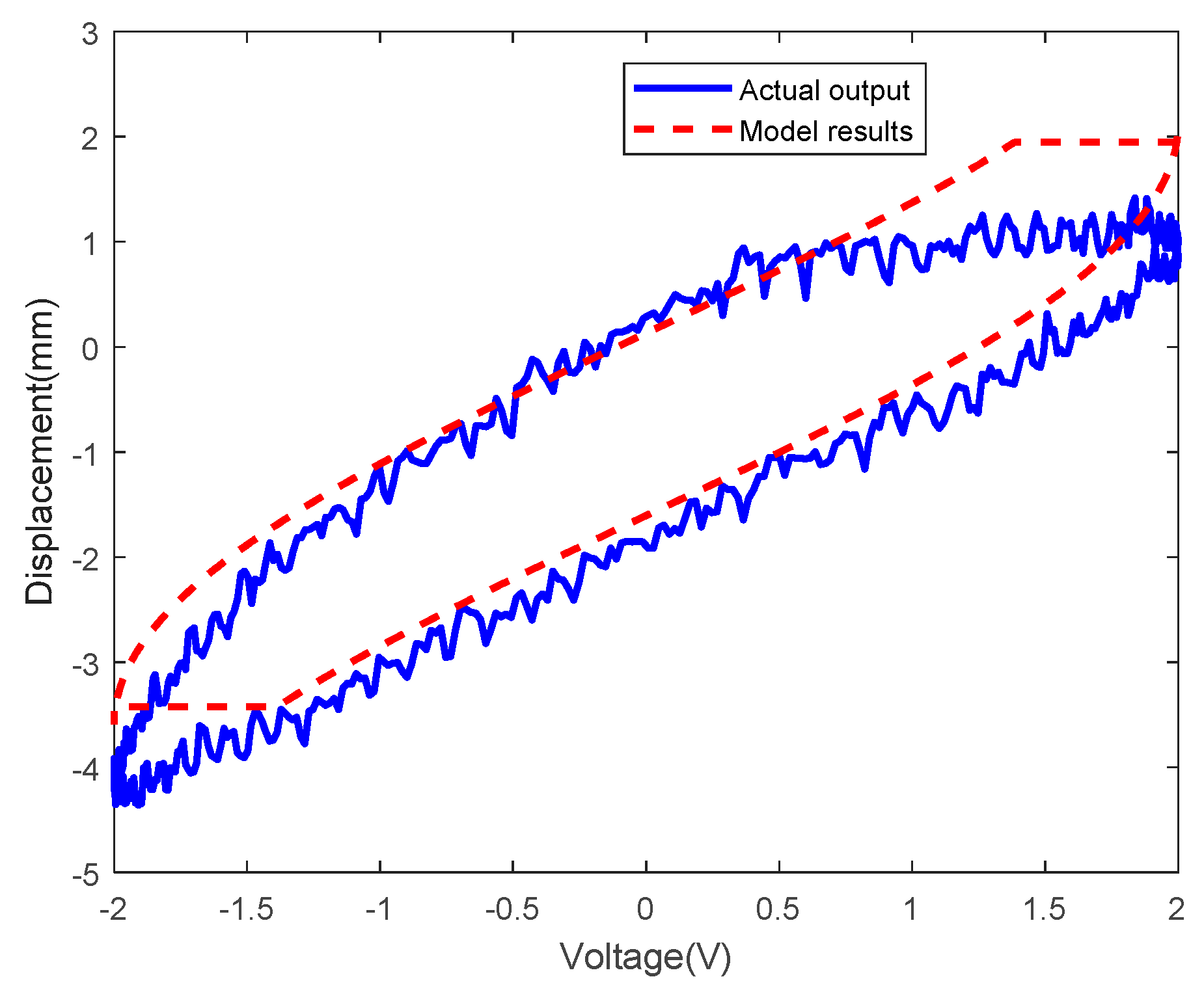
3.1. IPMC Actuator Modeling Based on Prandtl-Ishlinskii Method
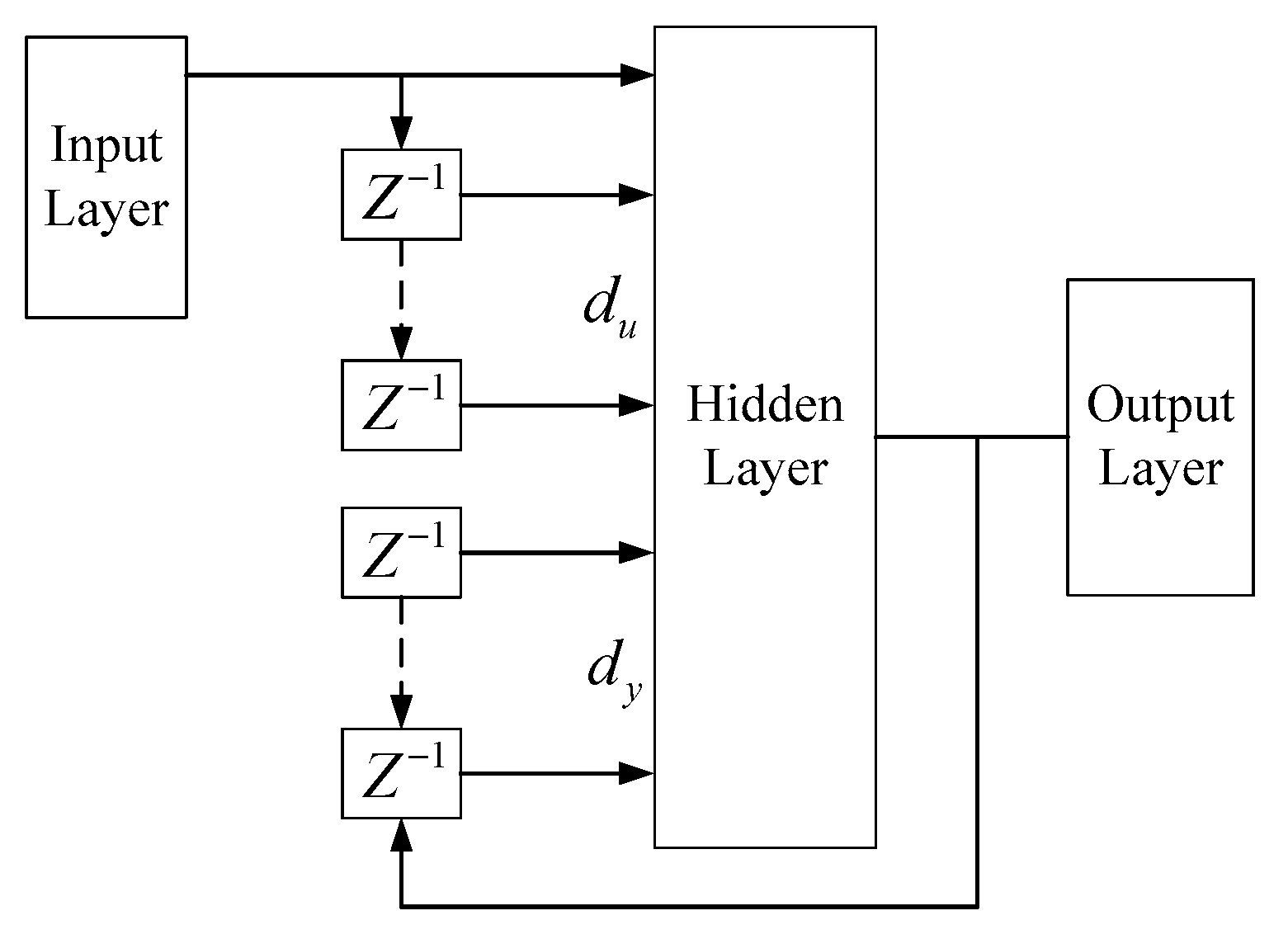
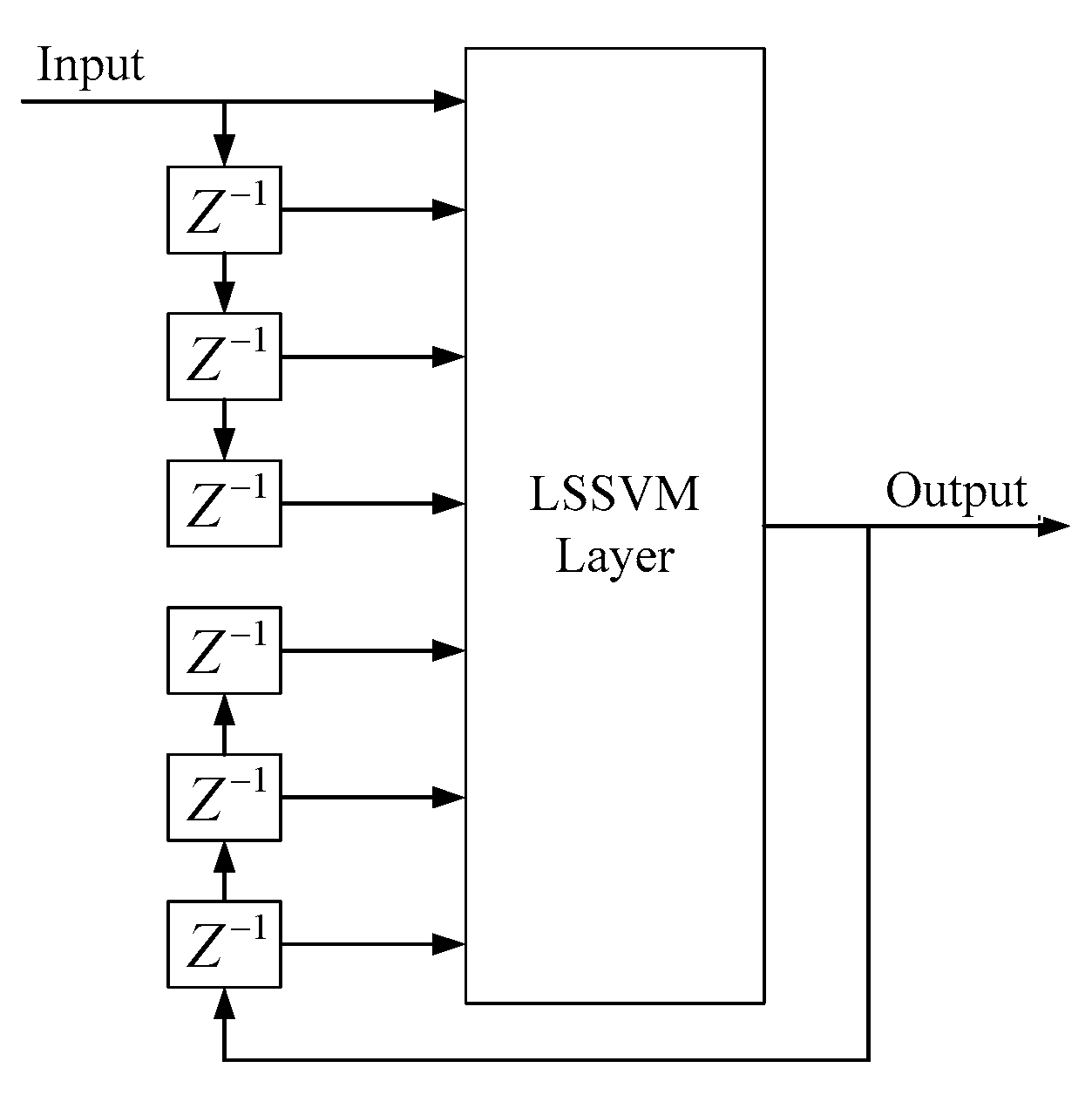
3.2. Modeling of IPMC Actuators Based on the LSSVM-NARX Method
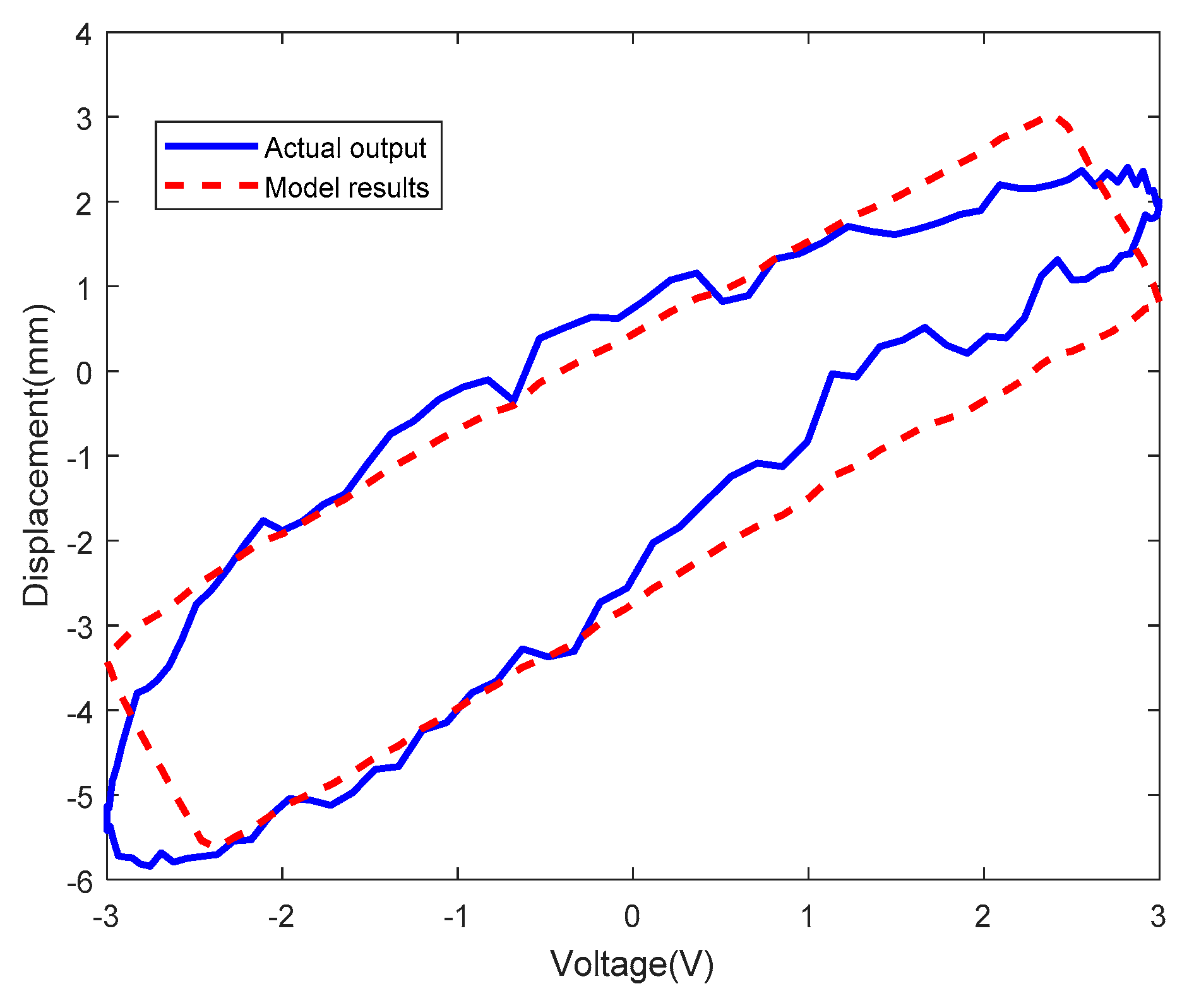
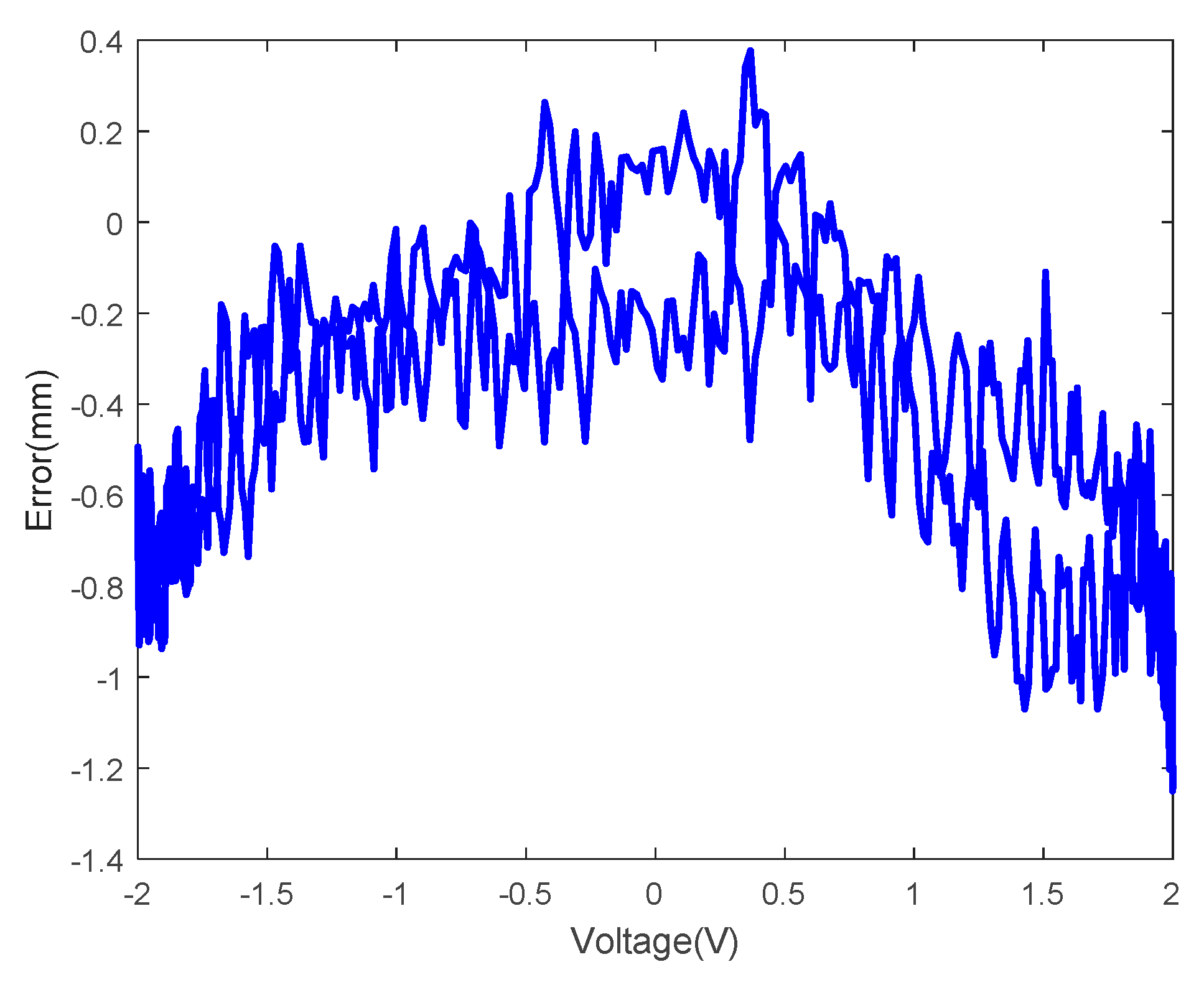
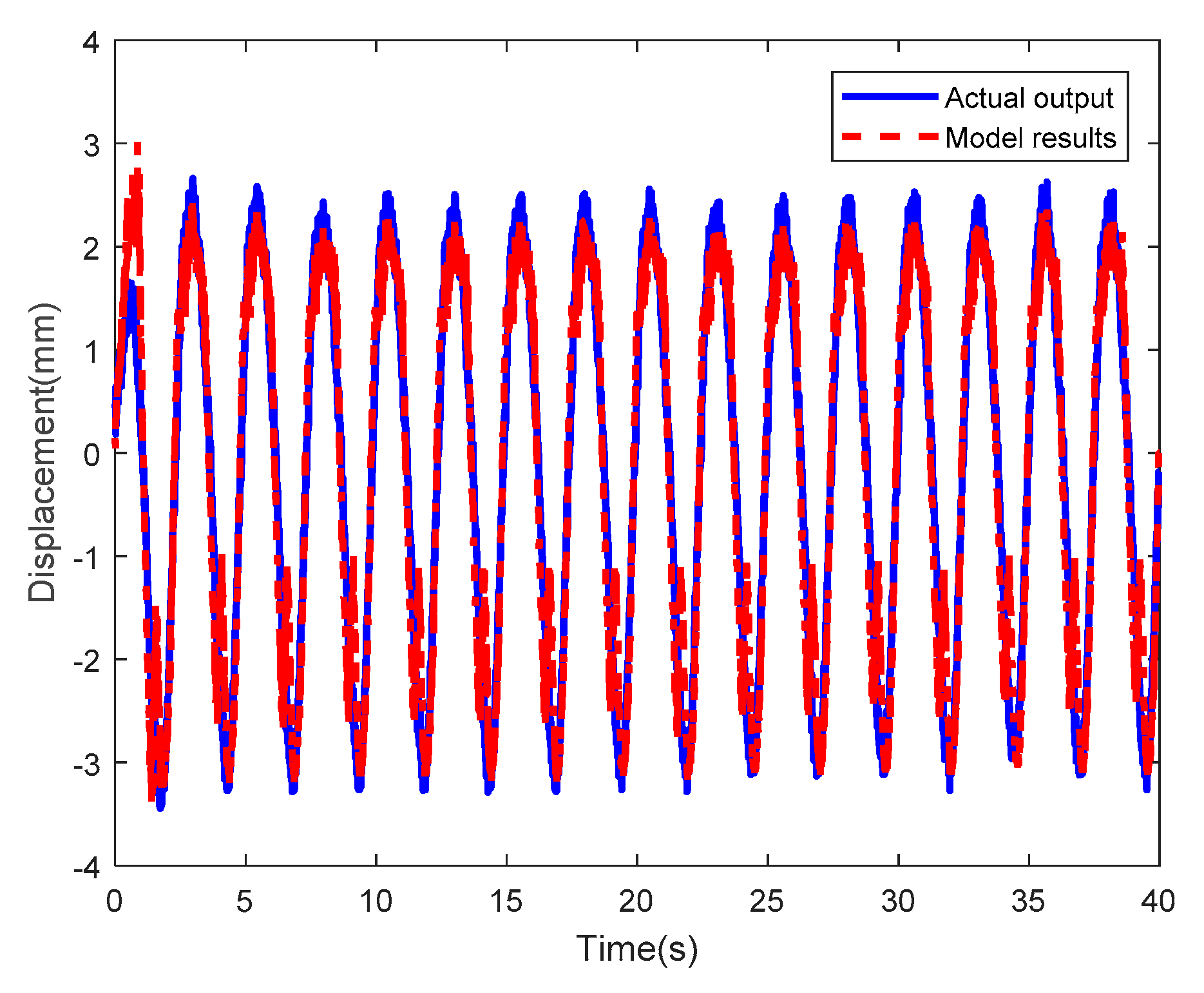
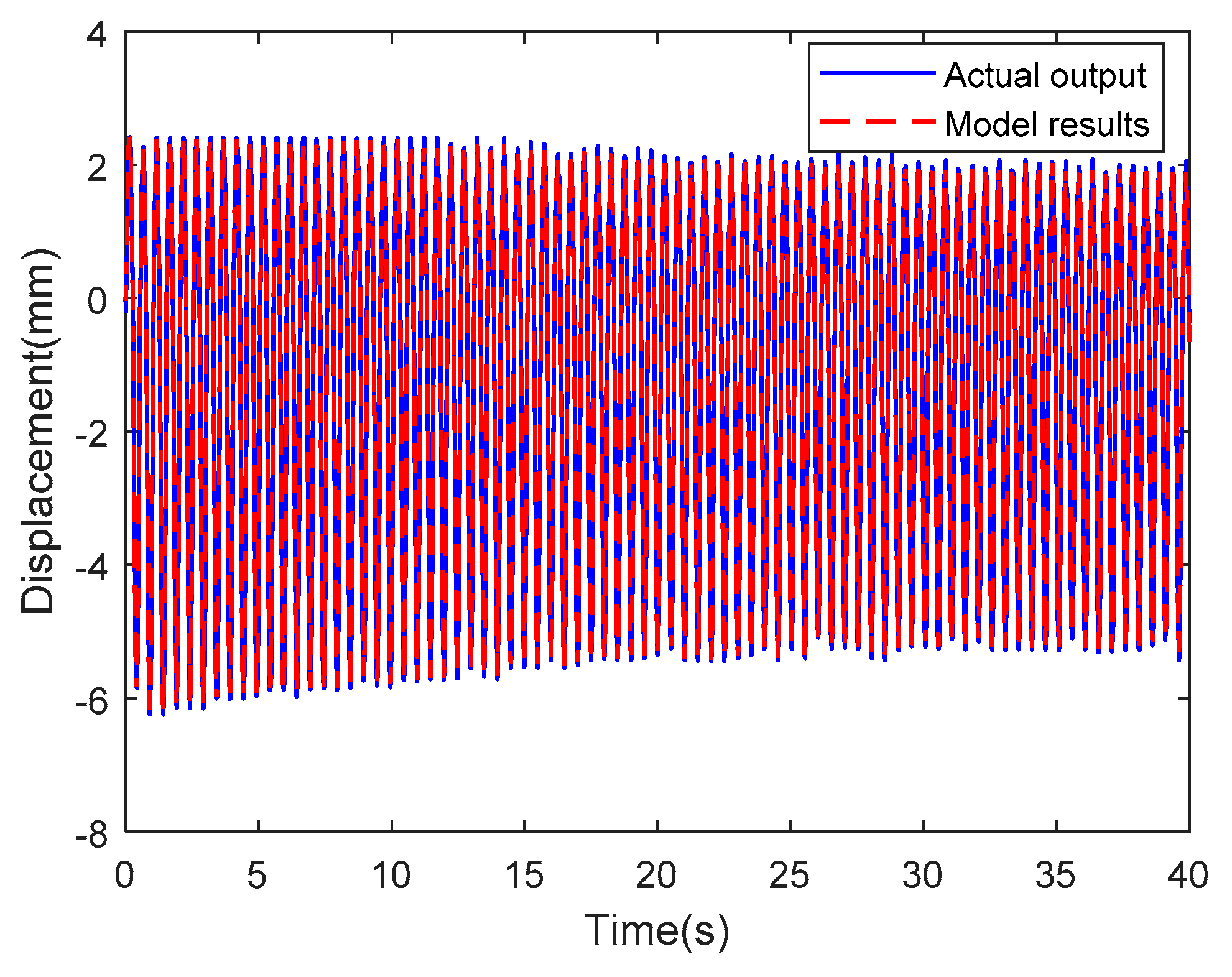
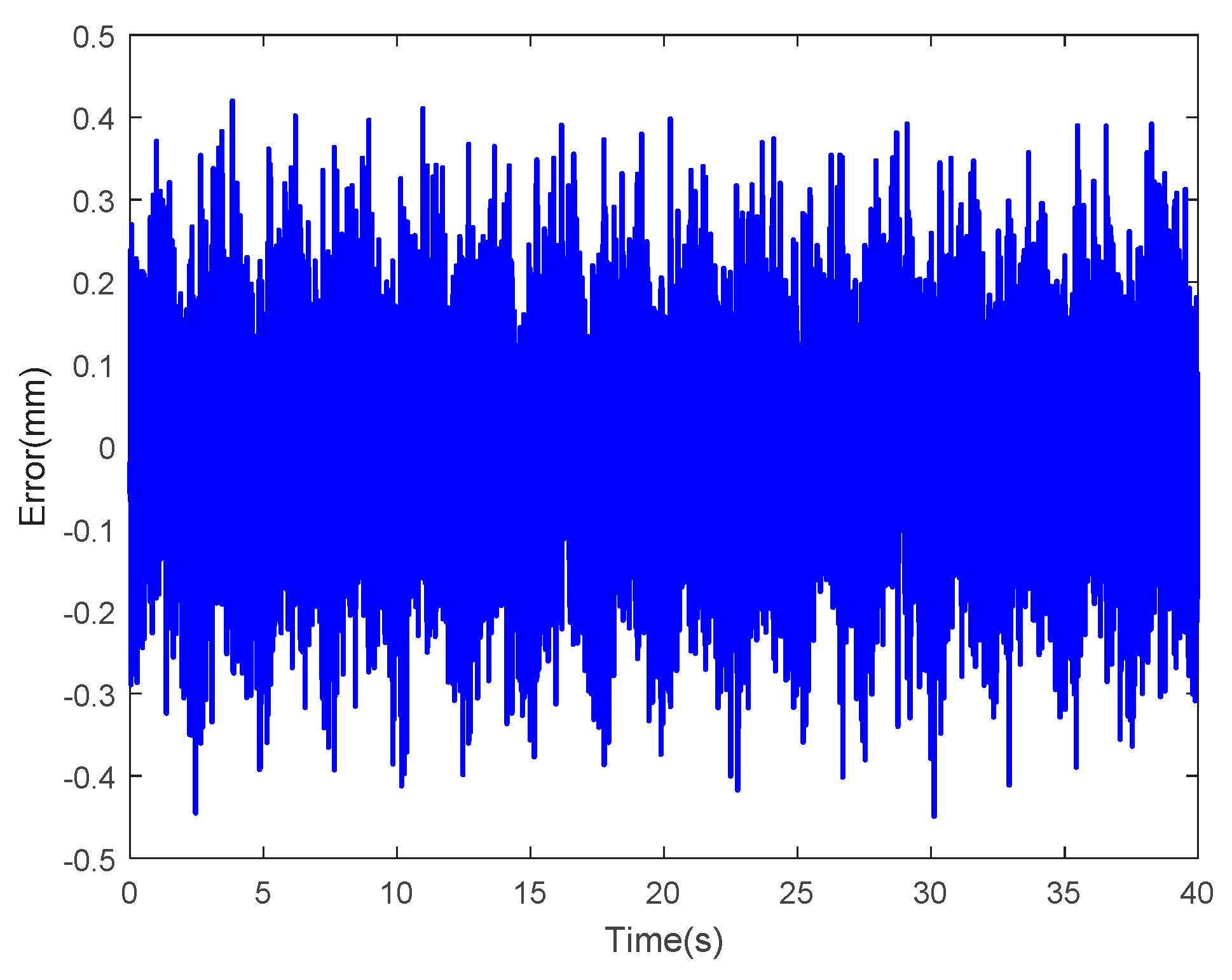
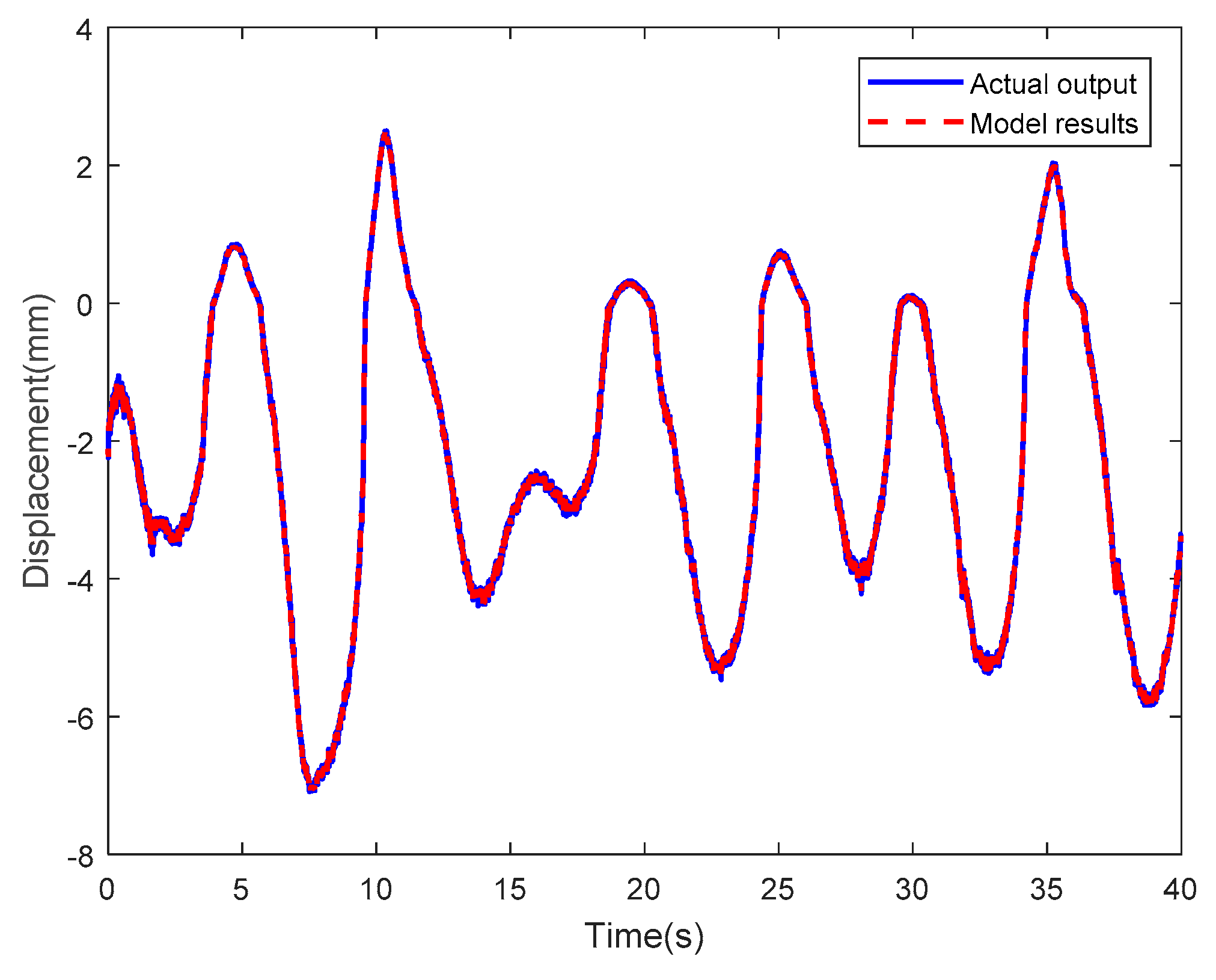
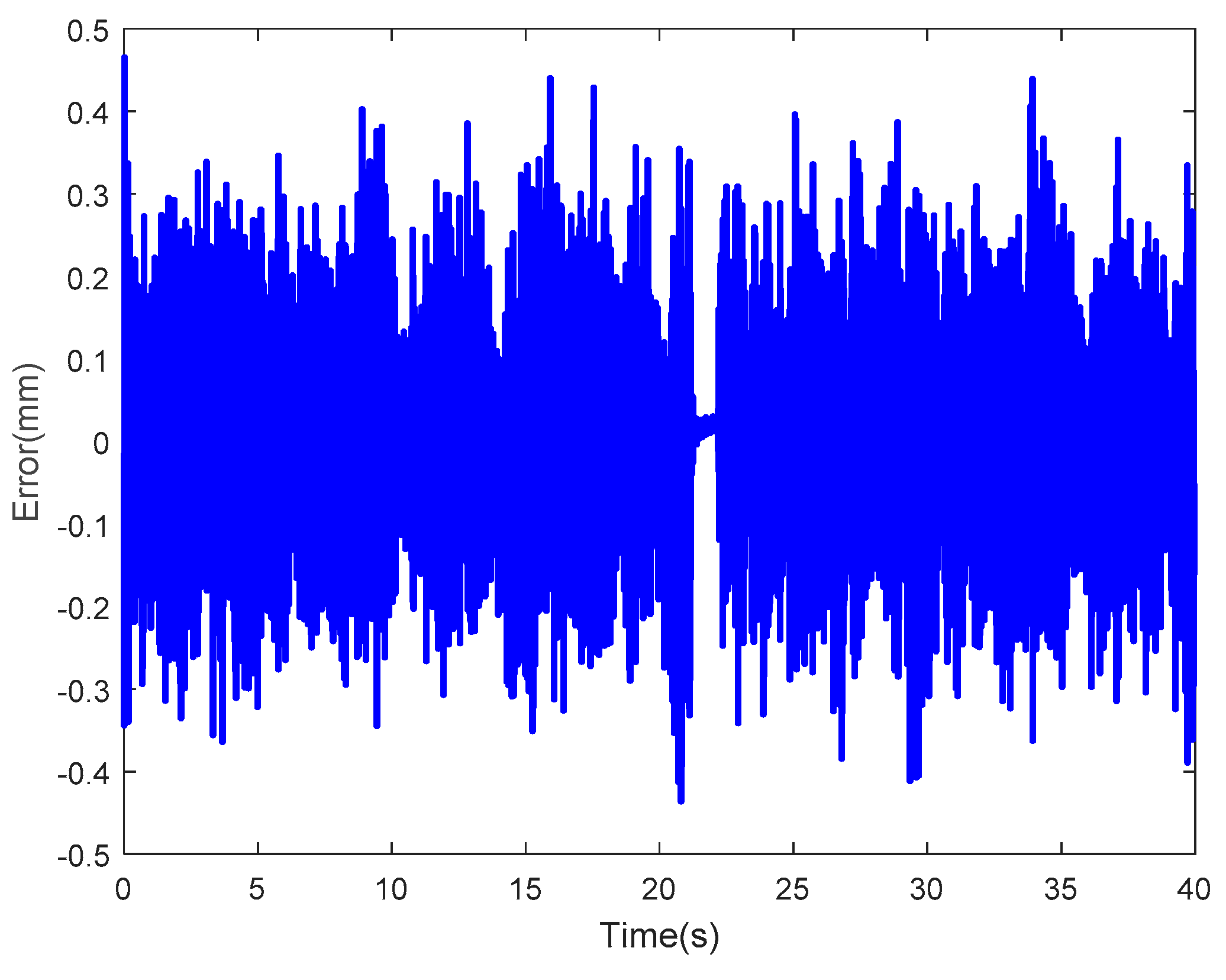
3.3. Results of the LSSVM-NARX Model
3.4. LSSVM-NARX Model Optimization Based on Artificial Colony Algorithm
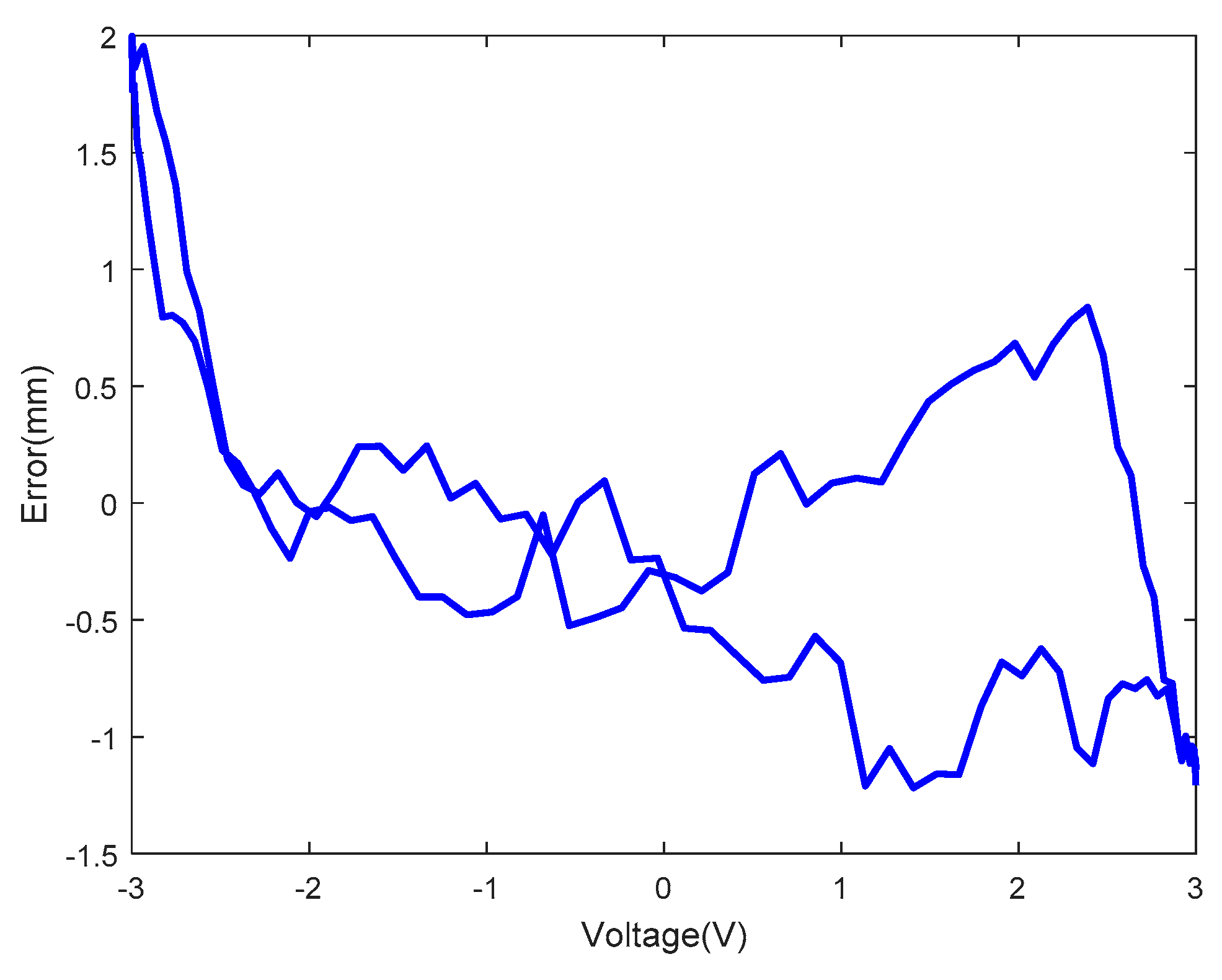
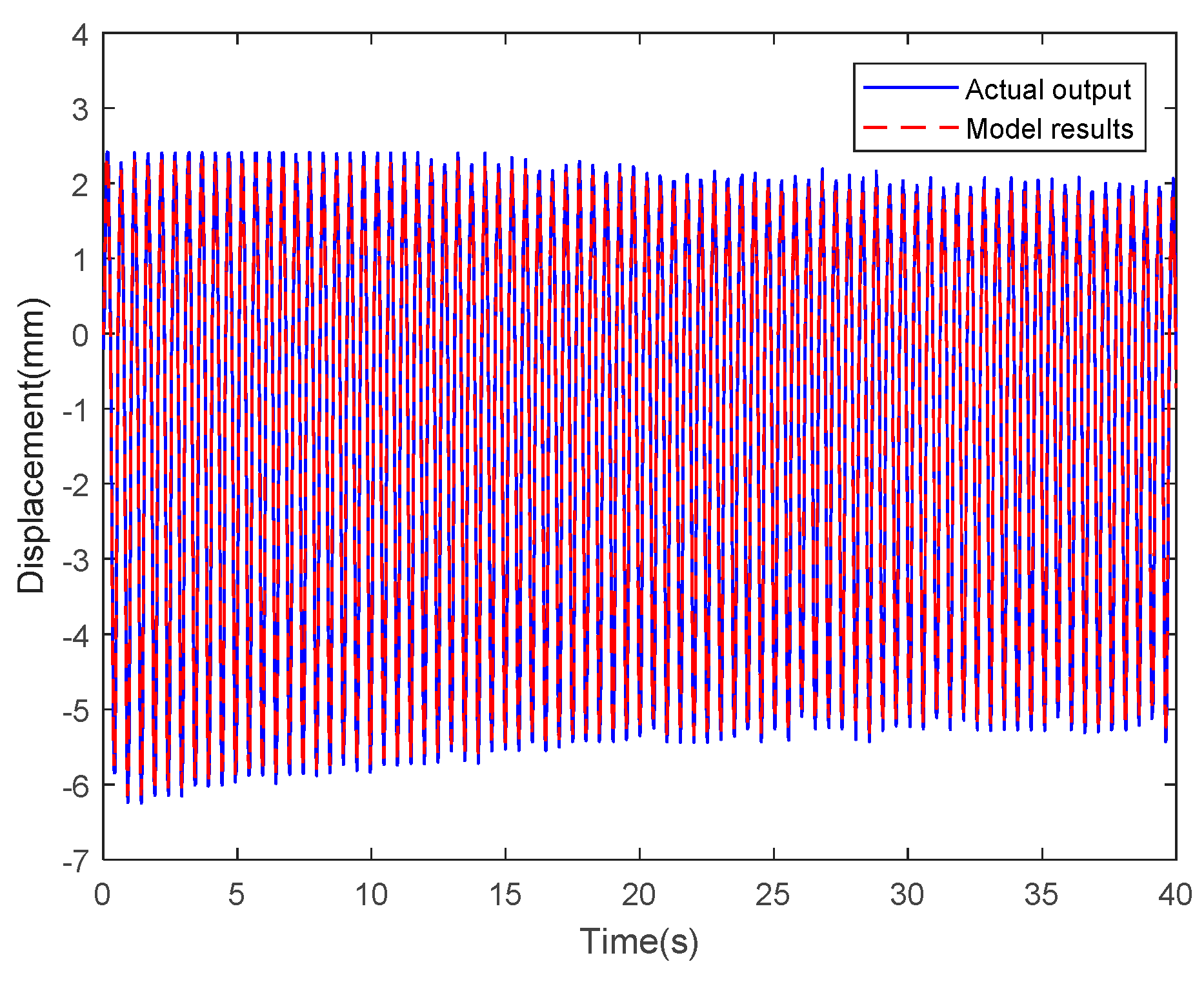
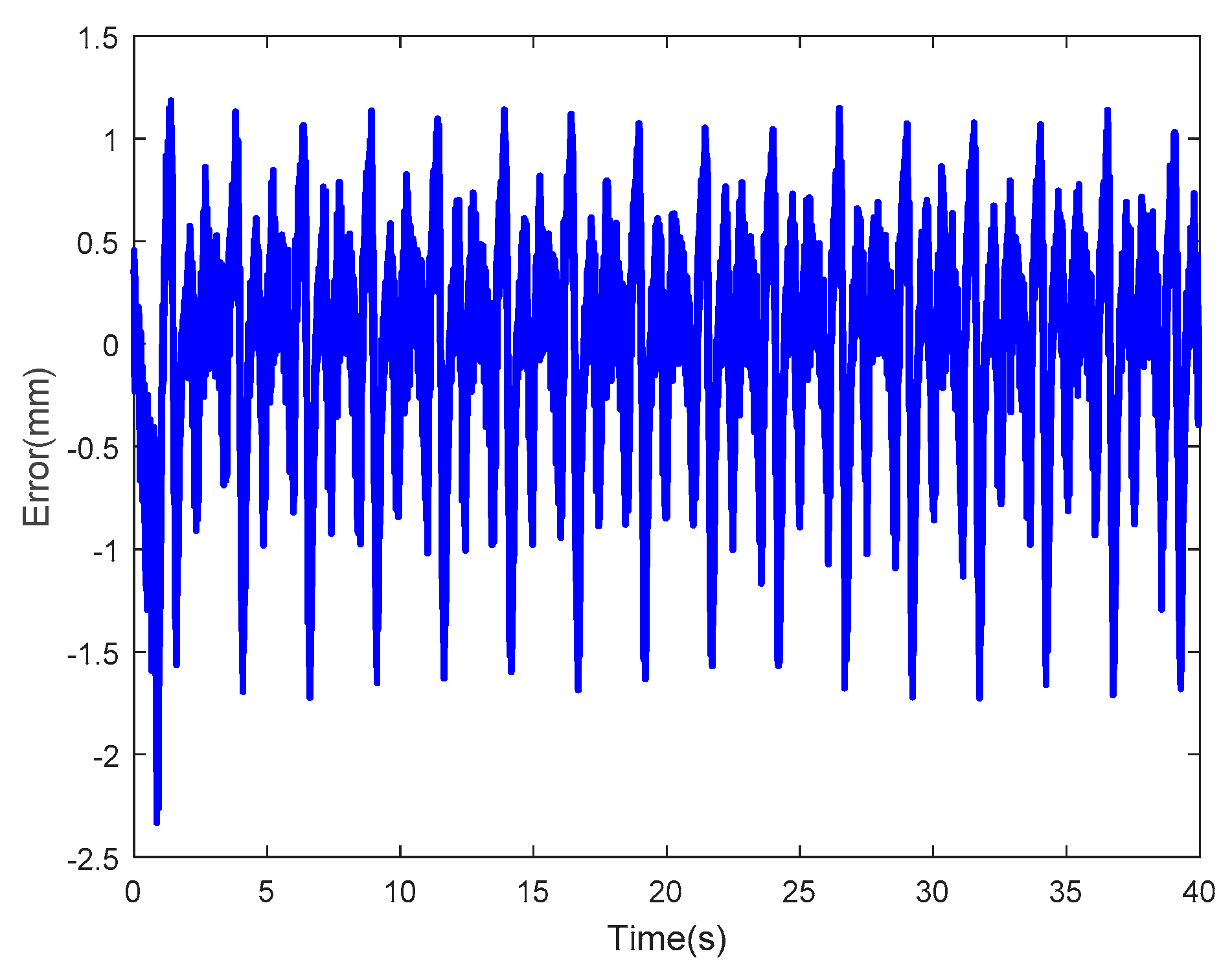
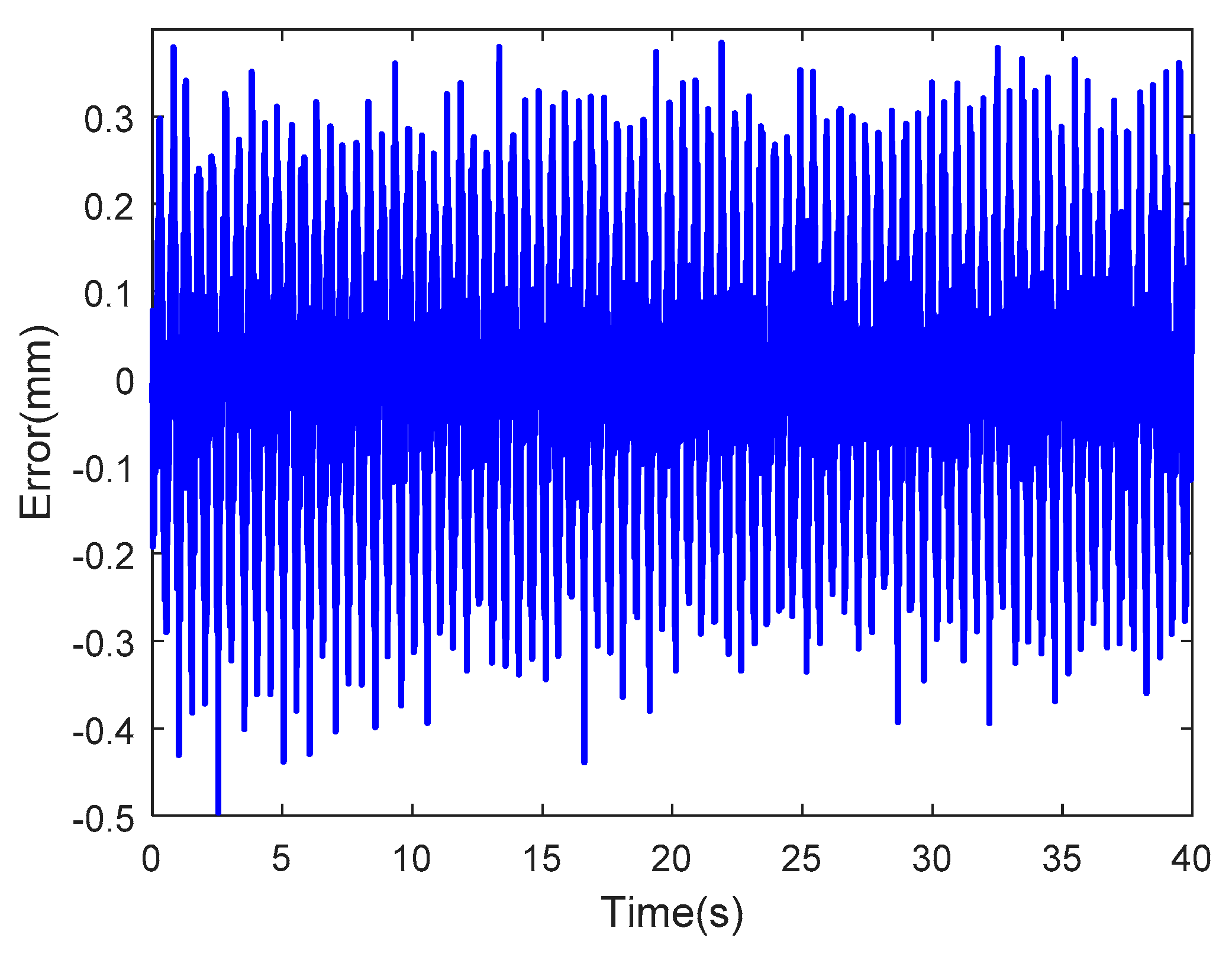
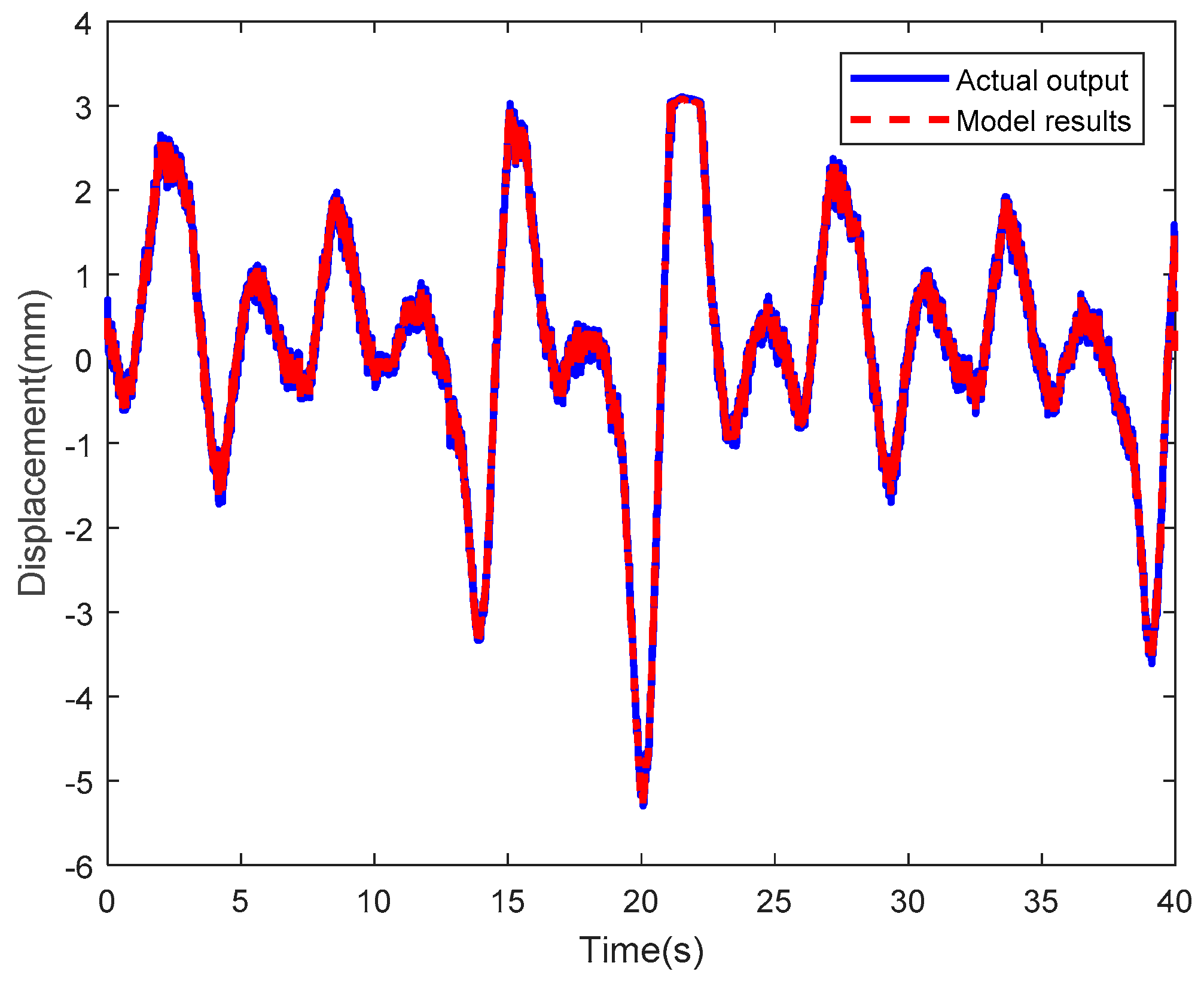
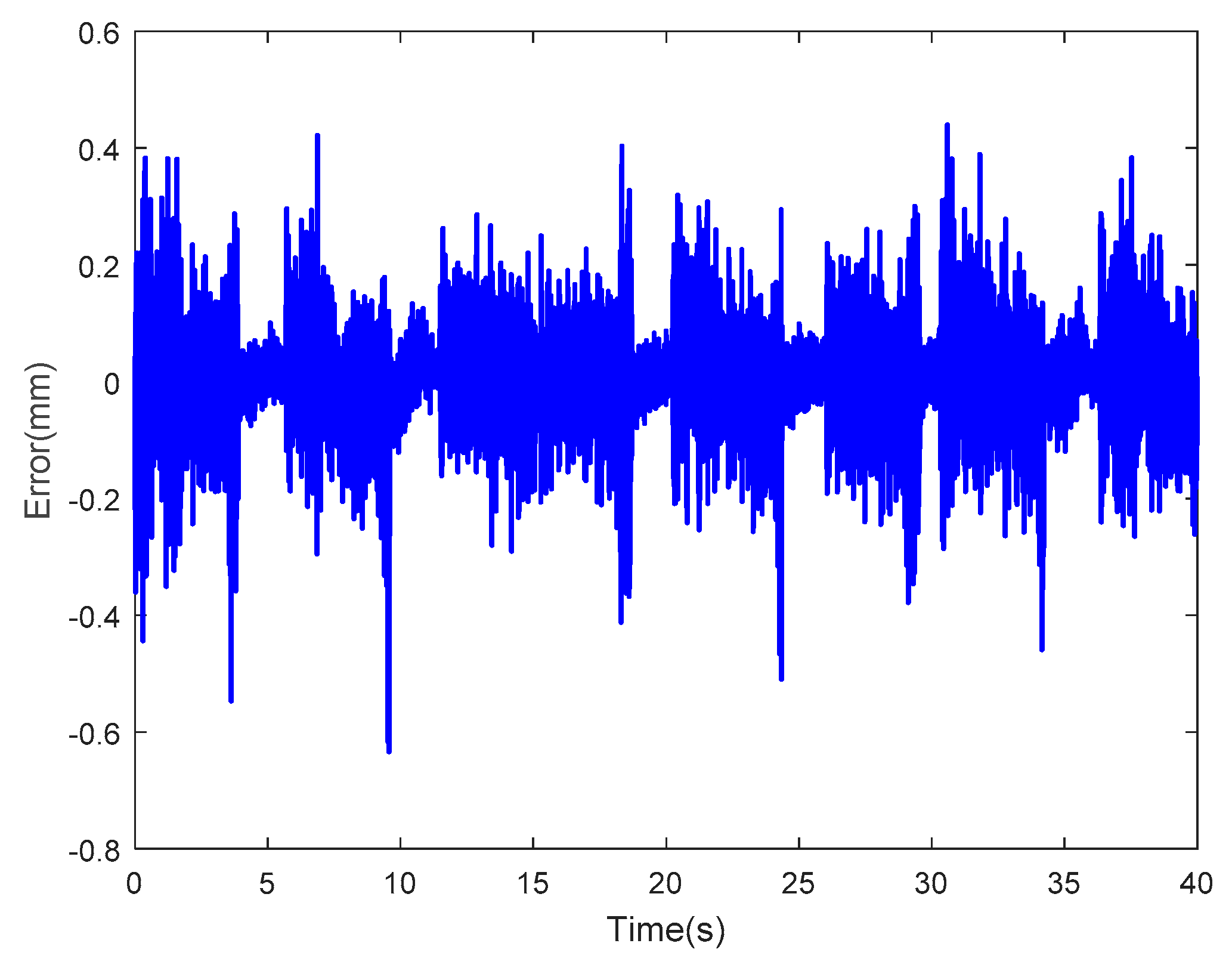
3.5. Verification of Optimized LSSVM-NARX Model
4. Design of IPMC Actuator Control Method Based on Inverse Controller
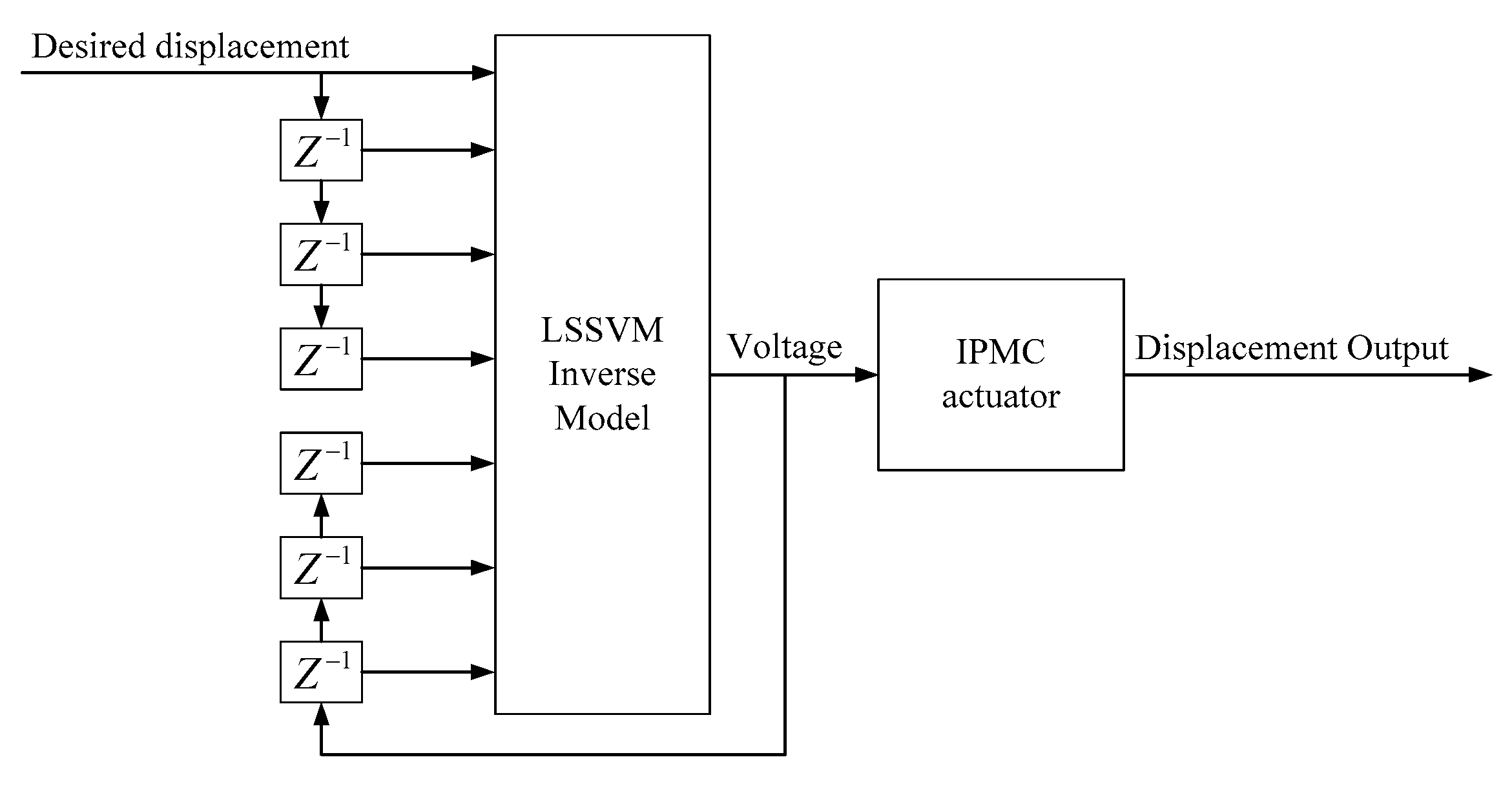
4.1. Inverse Controller Based on the LSSVM-NARX Model
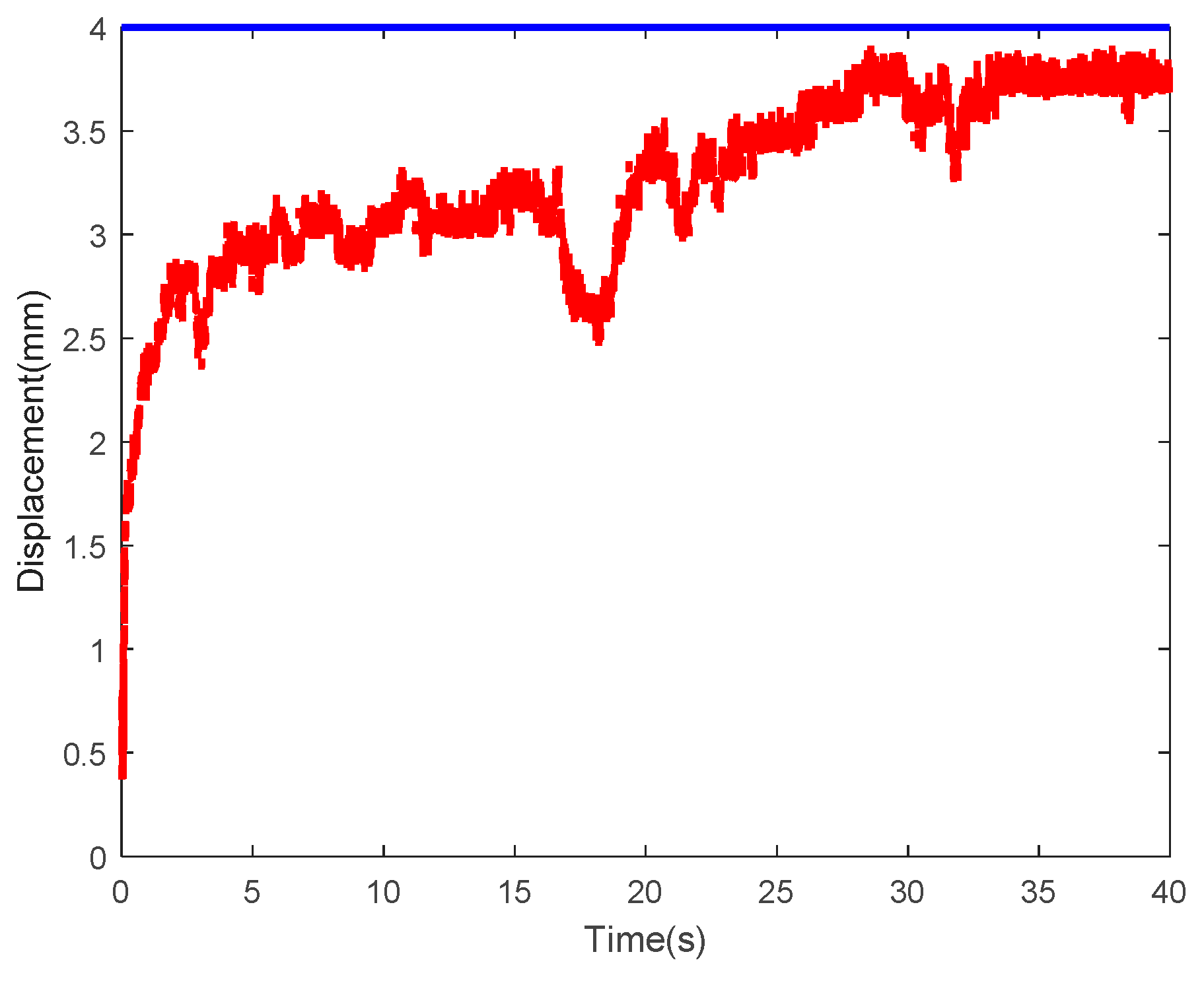
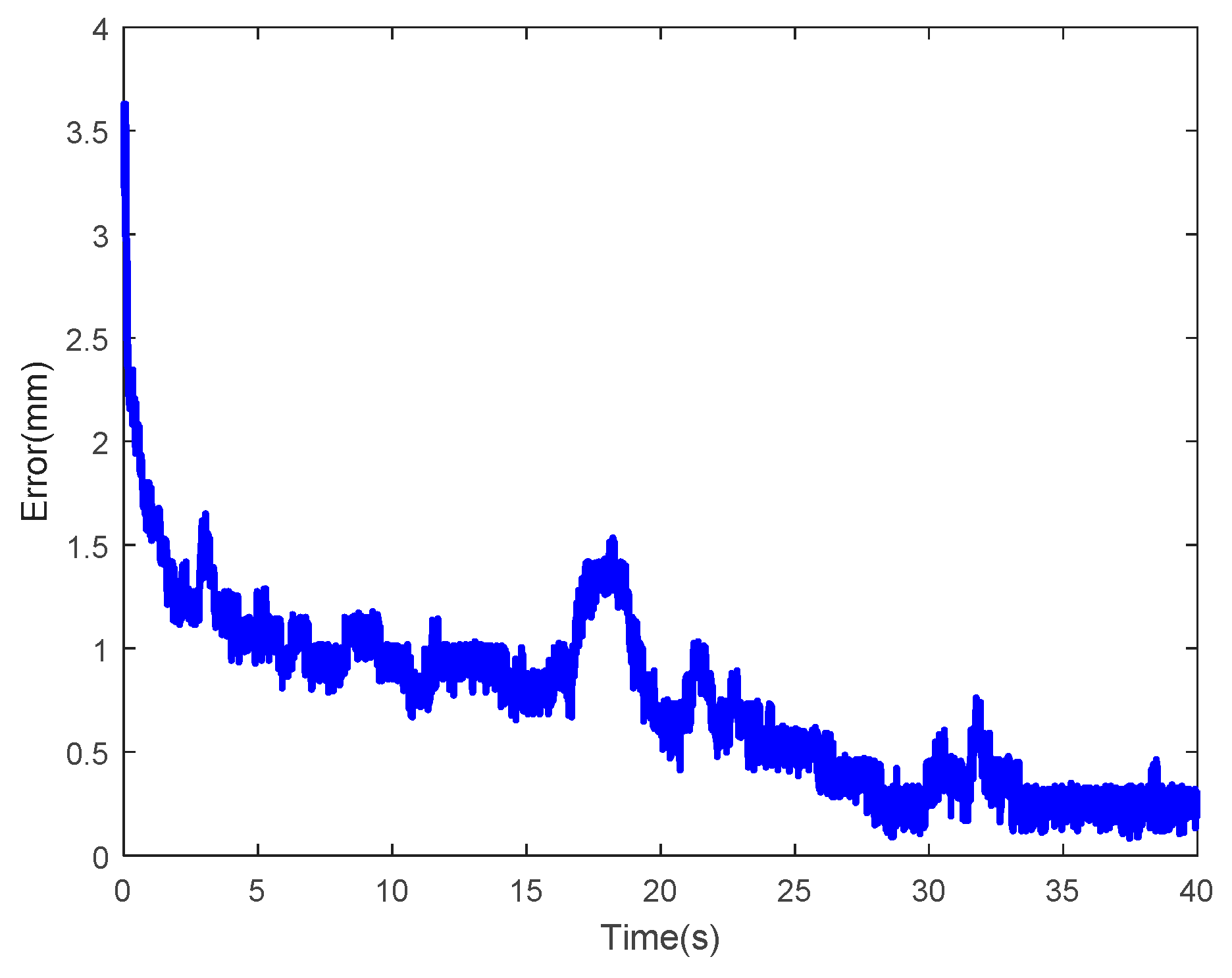
4.2. Simulation of Inverse Controller
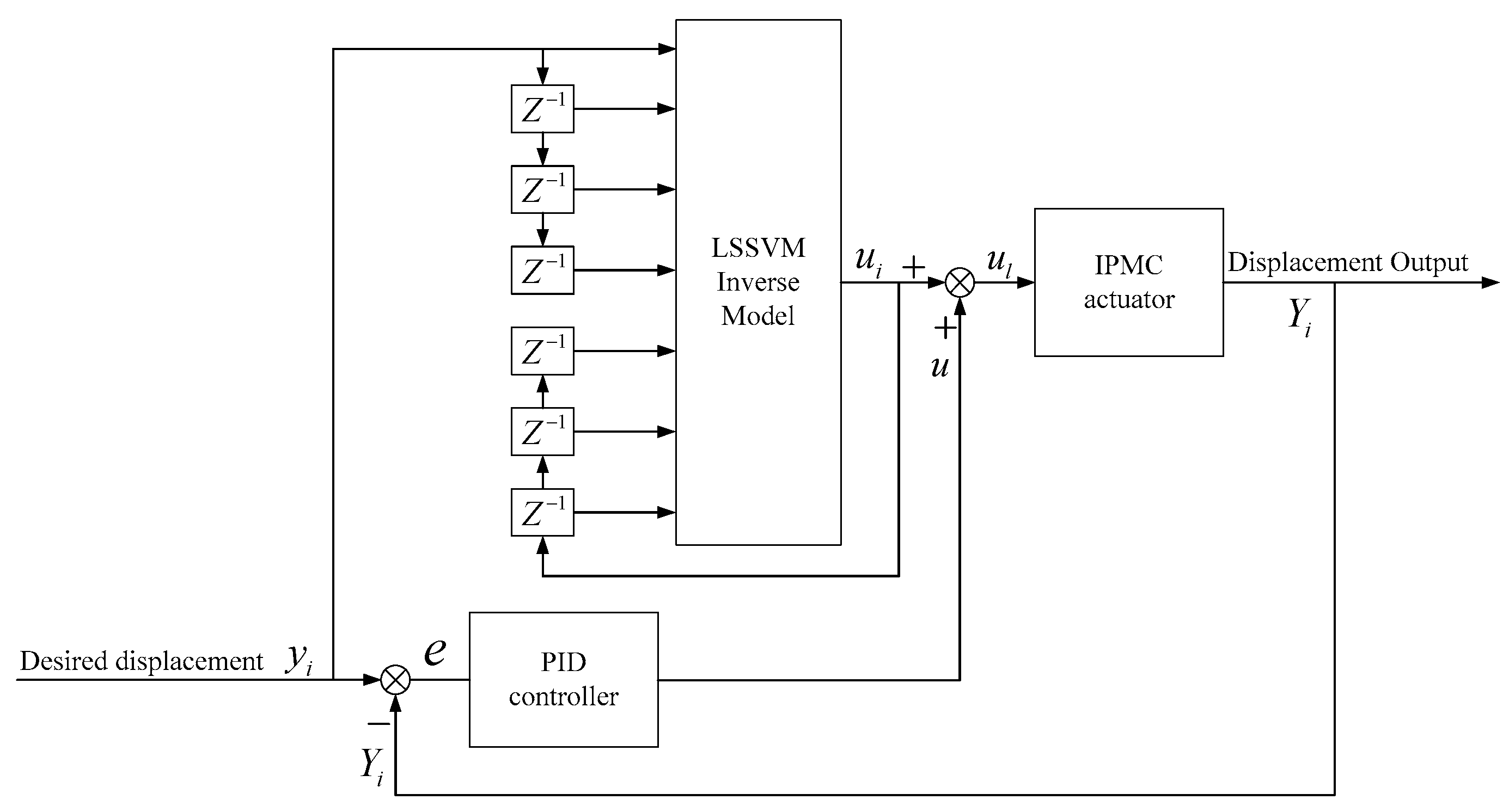
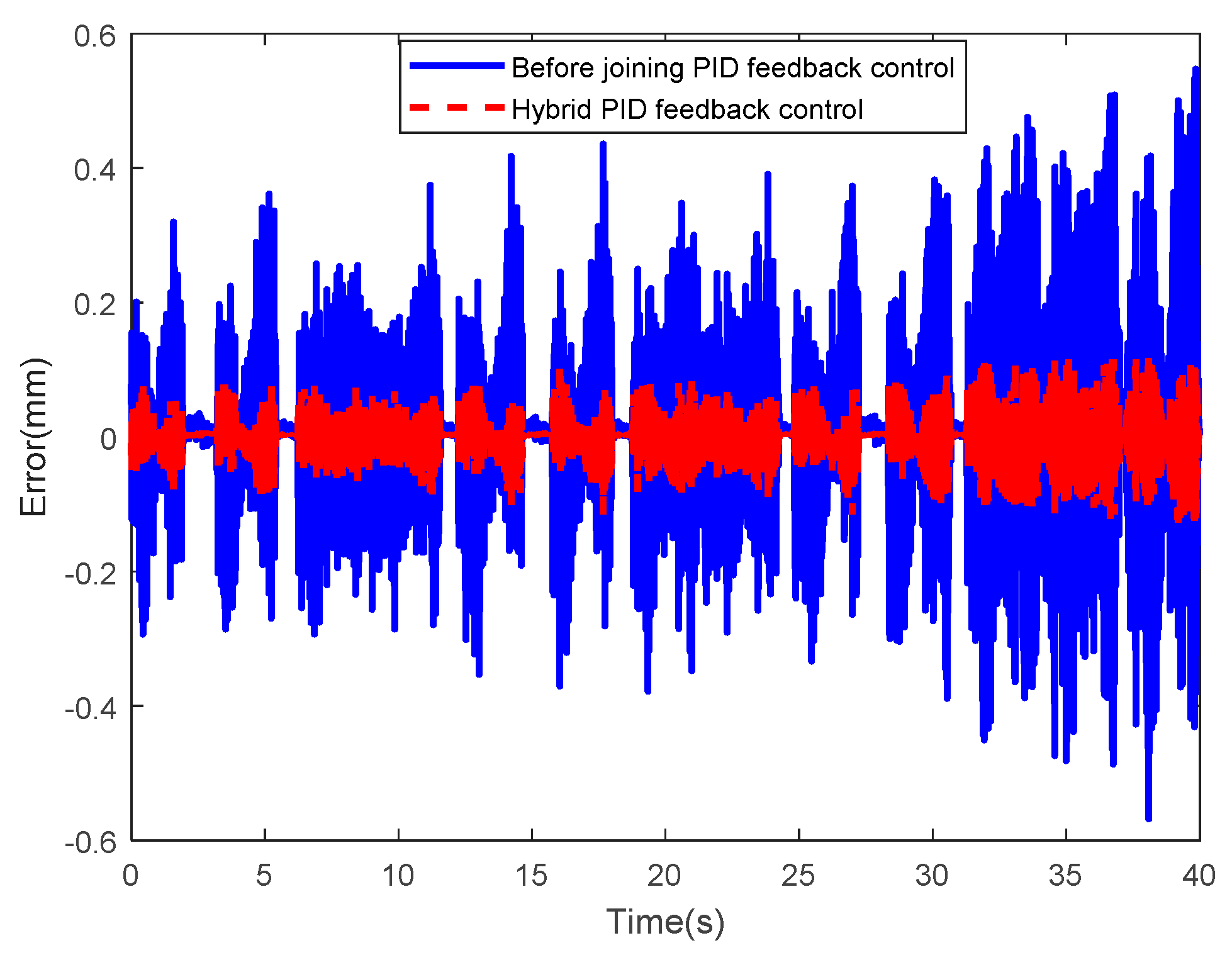
4.3. Design of Hybrid PID Control System
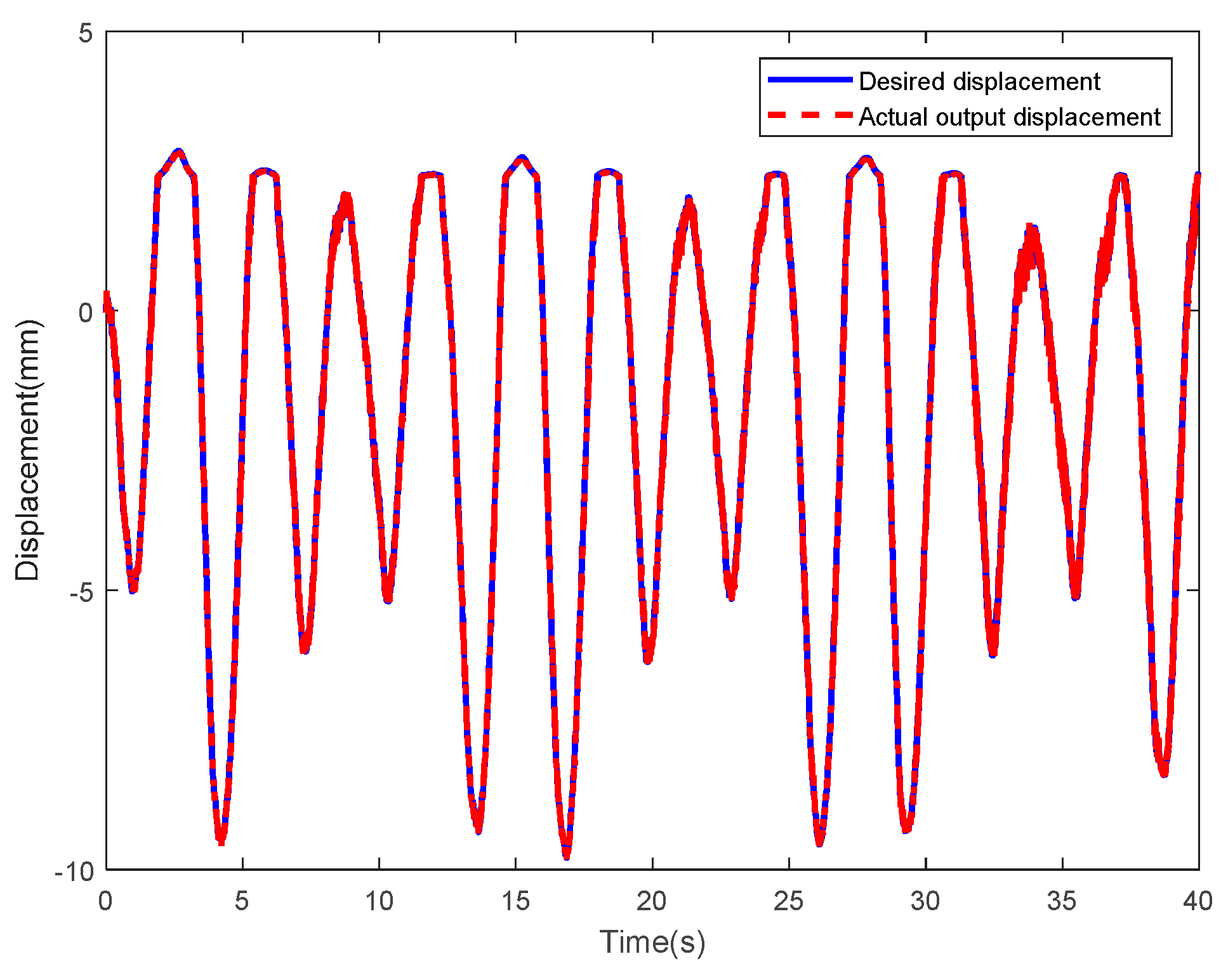
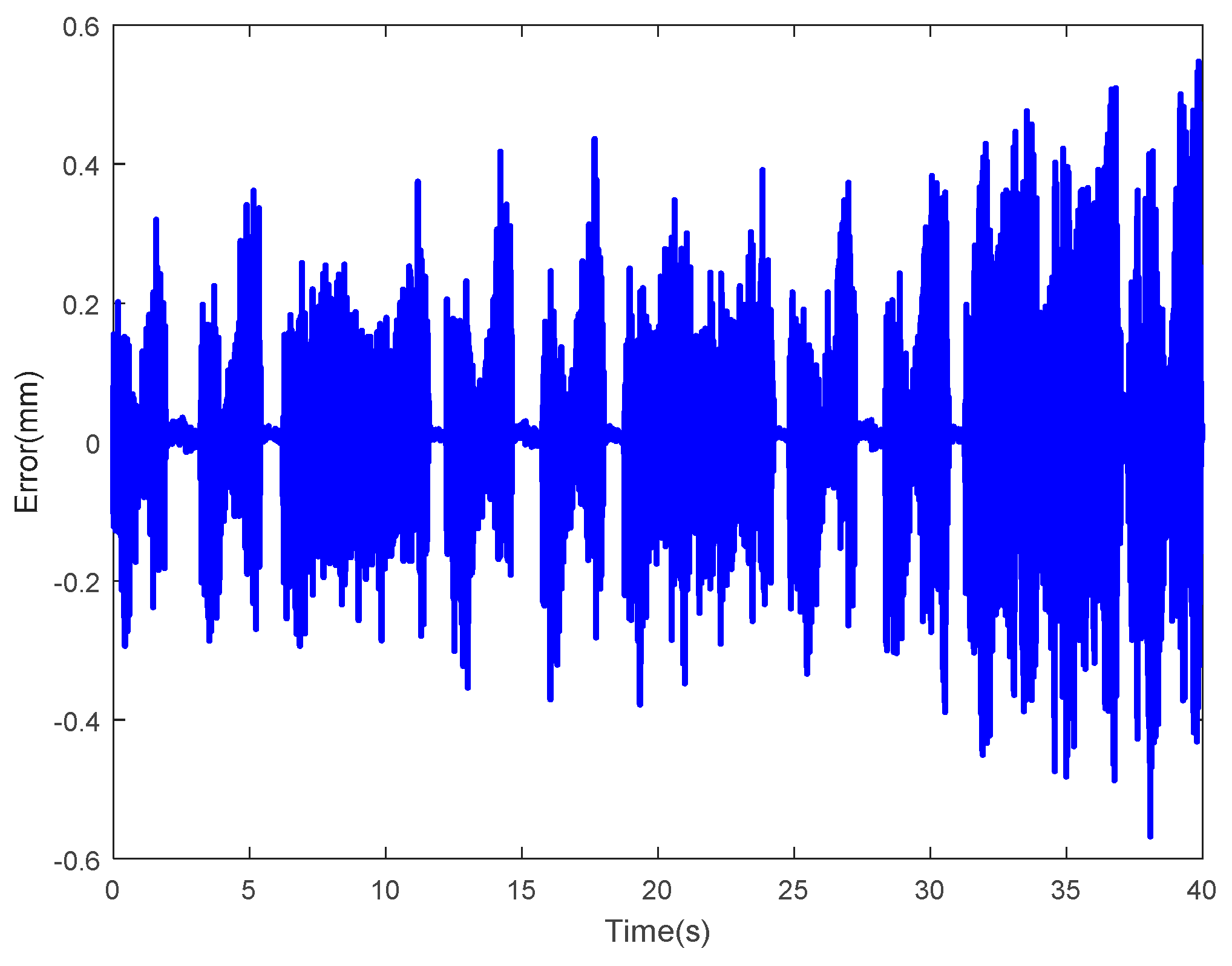
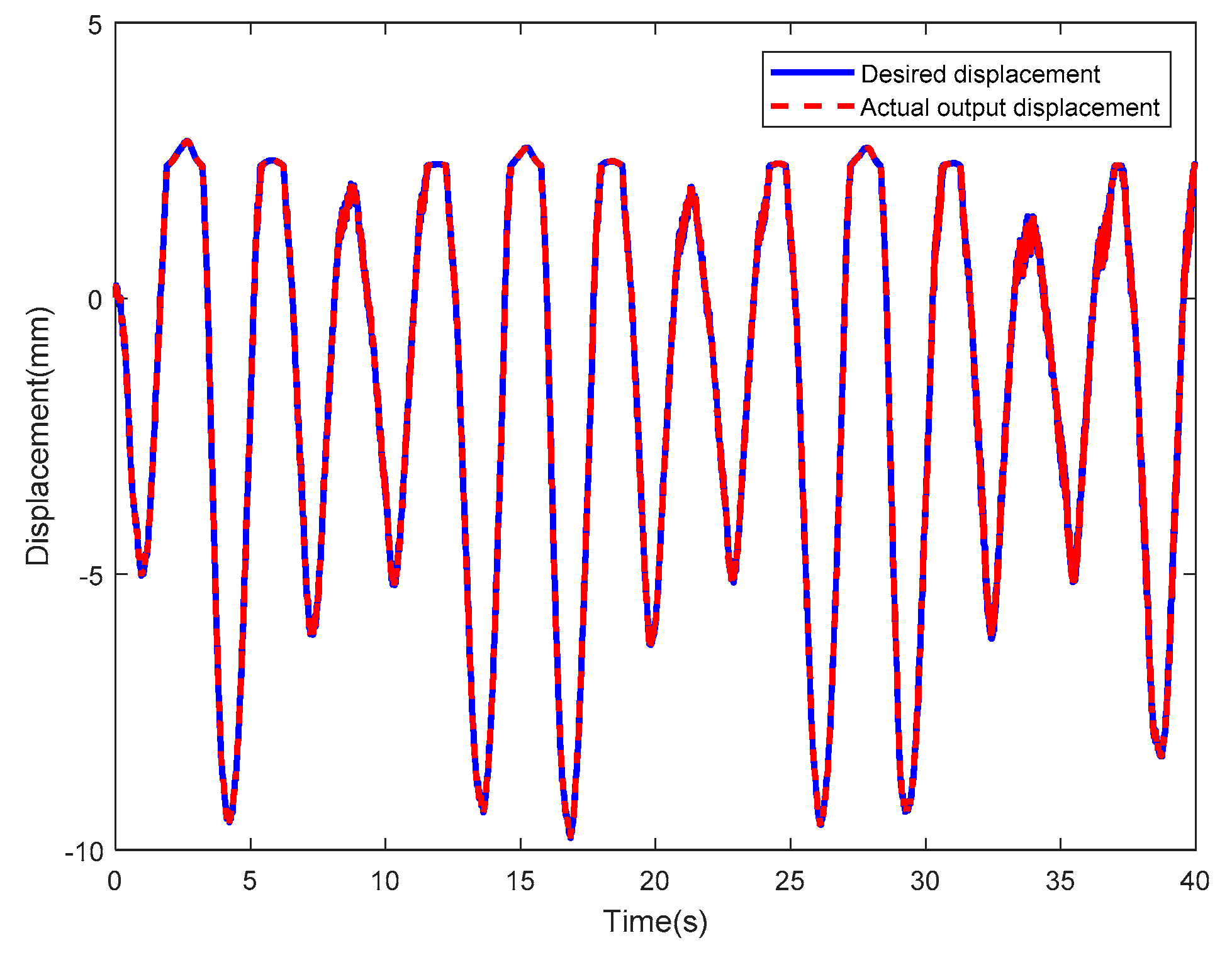
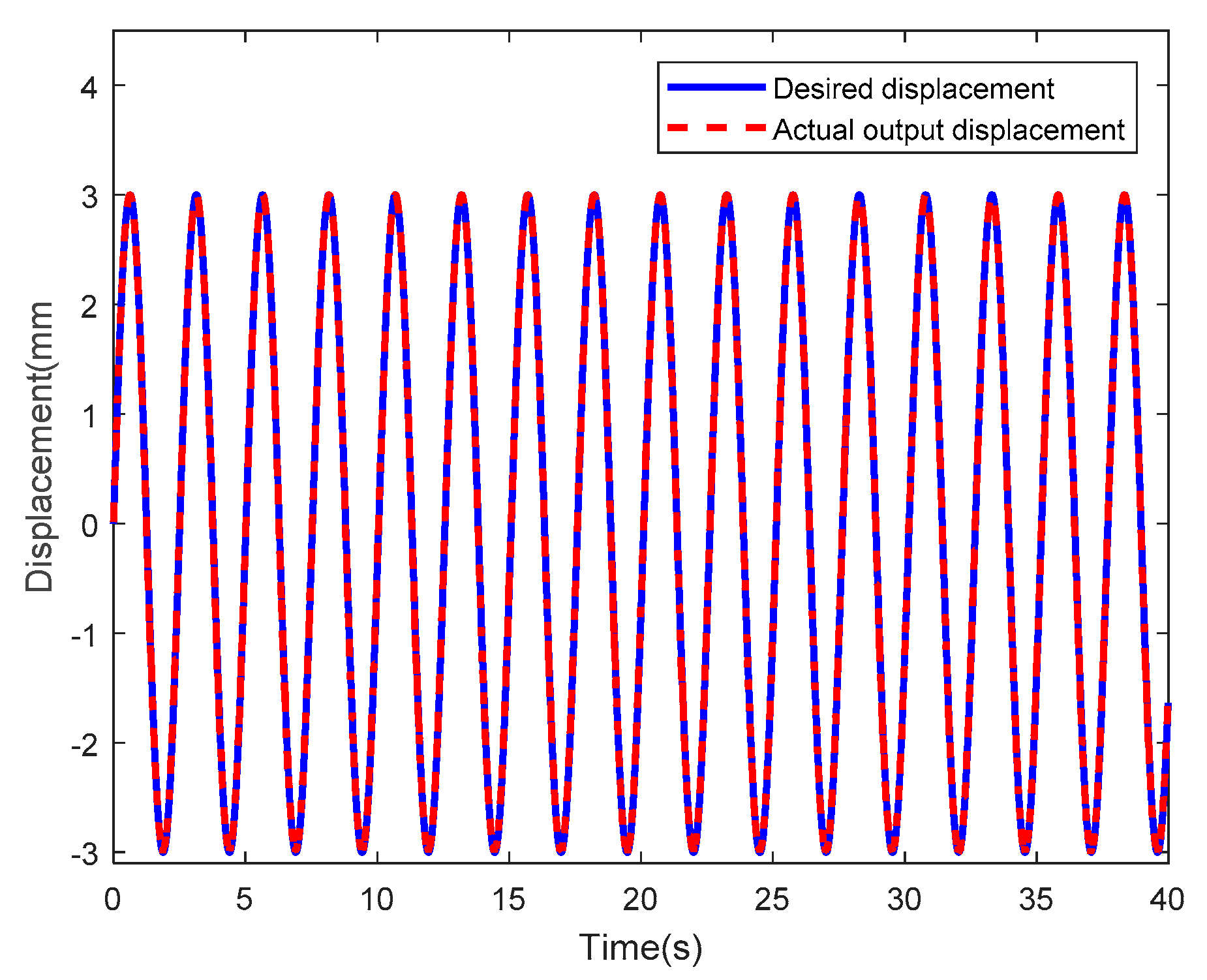
4.4. Experimental Results and Analysis
5. Conclusions and Prospects
Author Contributions
Funding
Conflicts of Interest
References
- Wang, H. Application of intelligent materials in the control system. J. Comput. Theor. Nanosci. 2015, 12, 2830–2836. [Google Scholar] [CrossRef]
- Mutlu, R.; Alici, G.; Xiang, X.; Li, W. Electro-mechanical modelling and identification of electroactive polymer actuators as smart robotic manipulators. Mechatronics 2014, 24, 241–251. [Google Scholar] [CrossRef] [Green Version]
- Hong, W.Y.J.; Almomani, A.; Cchen, Y.F.; Jamshidi, R.; Montazami, R. Soft ionic electroactive polymer actuators with tunable non-linear angular deformation. Materials 2017, 10, 664. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Bamber, T.; Zhao, Y.; Chamberlain, M.R.; Justham, L.; Jackson, M. Toward adaptive and intelligent electro-adhesives for robotic material handling. IEEE Robot. Autom. Lett. 2017, 2, 538–545. [Google Scholar] [CrossRef]
- Alekseev, N.I.; Broiko, A.P.; Kalenov, V.E. Structure of a graphene-modified electroactive polymer for membranes of biomimetic systems: Simulation and experiment. J. Struct. Chem. 2018, 59, 1707–1718. [Google Scholar] [CrossRef]
- Bashir, M.; Rajendran, P. A review on electroactive polymers development for aerospace applications. J. Intell. Mater. Syst. Struct. 2018, 28, 3681–3695. [Google Scholar] [CrossRef]
- Chang, L.F.; Liu, Y.F.; Yang, Q.; Yu, L.; Liu, J.; Zhu, Z.; Lu, P.; Wu, Y.; Hu, Y. Ionic electroactive polymers used in bionic robots: A review. J. BionicEng. 2018, 15, 765–782. [Google Scholar] [CrossRef]
- Palza, H.; Zapata, P.A.; Angulo-Pineda, C. Electroactive smart polymers for biomedical applications. Materials 2019, 12, 277. [Google Scholar] [CrossRef]
- Chidsey, C.E.; Murray, R.W. Electroactive polymers and macromolecular electronics. Science 1986, 231, 25–31. [Google Scholar] [CrossRef]
- Tiwari, R.; Garcia, E. The state of understanding of ionic polymer metal composite architecture: A review. SmartMater. Struct. 2011, 20. [Google Scholar] [CrossRef]
- Li, H.Y.; Liu, Y.L. Nafion-functionalized electrospun poly (vinylidene fluoride) (PVDF) nanofibers for high performance proton exchange membranes in fuel cells. J. Mater. Chem. A 2014, 2, 3783–3793. [Google Scholar] [CrossRef]
- Peng, K.J.; Lai, J.Y.; Liu, Y.L. Nanohybrids of graphene oxide chemically-bonded with Nafion: Preparation and application for proton exchange membrane fuel cells. J. Membr. Sci. 2016, 514, 86–94. [Google Scholar] [CrossRef]
- Kim, D.J.; Jo, M.J.; Nam, S.Y. A review of polymer-nanocomposite electrolyte membranes for fuel cell application. J. Ind. Eng. Chem. 2015, 21, 36–52. [Google Scholar] [CrossRef]
- Liu, Y.; Chang, L.; Hu, Y.; Niu, Q.; Yu, L.; Wang, Y.; Lu, P.; Wu, Y. Rough interface in IPMC: Modeling and its influence analysis. SmartMater. Struct. 2018, 27. [Google Scholar] [CrossRef]
- Shen, Q.; Stalbaum, T.; Minaian, N.; Oh, I.K.; Kim, K.J. A robotic multiple-shape-memory ionic polymer-metal composite (IPMC) actuator: Modeling approach. SmartMater. Struct. 2019, 28. [Google Scholar] [CrossRef]
- Zhu, Z.C.; Bian, C.S.; Ru, J.; Bai, W.F.; Chen, H.L. Rapid deformation of IPMC under a high electrical pulse stimulus inspired by action potential. SmartMater. Struct. 2019, 28. [Google Scholar] [CrossRef]
- Jain, R.K.; Datta, S.; Majumder, S. Design and control of an IPMC artificial muscle finger for micro gripper using EMG signal. Mechatronics 2013, 23, 381–394. [Google Scholar] [CrossRef]
- Tadokoro, S.; Yamagami, S.; Takamori, T.; Oguro, K. An actuator model of ICPF for robotic applications on the basis of physicochemical hypotheses. In Proceedings of the IEEE International Conference on Robotics & Automation, San Francisco, CA, USA, 24–28 April 2000; pp. 1340–1346. [Google Scholar]
- Tadokoro, S.; Fukuhara, M.; Maeba, Y.; Takamori, T. A dynamic model of ICPF actuator considering ion-induced lateral strain for molluskan robotics. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots & Systems, Lausanne, Switzerland, 30 September–4 October 2002. [Google Scholar]
- Bonomo, C.; Fortuna, L.; Giannone, S.; Mazza, D. A circuit to model the electrical behavior of an ionic polymer-metal composite. IEEE Trans. Circuits Syst. I: Regul. Pap. 2012, 53, 338–350. [Google Scholar] [CrossRef]
- Anh, H.P.H.; Ahn, K.K. Identification of pneumatic artificial muscle manipulators by a MGA-based nonlinear NARX fuzzy model. Mechatronics 2009, 19, 106–133. [Google Scholar] [CrossRef]
- Chen, Z.; Hedgepeth, D.R.; Tan, X. A nonlinear, control-oriented model for ionic polymer-metal composite actuators. SmartMater. Struct. 2009, 18, 1851–1856. [Google Scholar] [CrossRef]
- Nam, D.N.C.; Ahn, K.K. Identification of an ionic polymer metal composite actuator employing Preisach type fuzzy NARX model and Particle Swarm Optimization. Sens. Actuators A Phys. 2012, 183, 105–114. [Google Scholar] [CrossRef]
- Lagosh, A.V.; Broyko, A.P.; Kalyonov, V.E.; Khmelnitskiy, I.K.; Luchinin, V.V. Modeling of IPMC actuator. In Proceedings of the 2017 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), St. Petersburg, Russia, 1–3 February 2017; pp. 916–918. [Google Scholar]
- Zamyad, H.; Naghavi, N. Behavior identification of IPMC actuators using laguerre-MLP network with consideration of ambient temperature and humidity effects on their performance. IEEETrans. Instrum. Meas. 2018, 67, 2723–2732. [Google Scholar] [CrossRef]
- Oh, S.J.; Kim, H. A study on the control of an IPMC actuator using an adaptive fuzzy algorithm. KSME Int. J. 2004, 18, 1–11. [Google Scholar] [CrossRef]
- Hao, L.; Li, Z. Modeling and adaptive inverse control of hysteresis and creep in ionic polymer-metal composite actuators. SmartMater. Struct. 2010, 19, 865–870. [Google Scholar] [CrossRef]
- Sun, Z.; Hao, L.; Chen, W.; Li, Z.; Liu, L. A novel discrete adaptive sliding modelike control method for ionic polymermetal composite manipulators. SmartMater. Struct. 2013, 22, 95–108. [Google Scholar] [CrossRef]
- Hao, L.; Chen, Y.; Sun, Z. The sliding mode control for different shapes and dimensions of IPMC on resisting its creep characteristics. SmartMater. Struct. 2015, 24, 964–978. [Google Scholar] [CrossRef]
- Chen, Y.; Hao, L.; Yang, H.; Gao, J. Kriging modeling and SPSA adjusting PID with KPWF compensator control of IPMC gripper for mm-sized objects. Rev. Sci. Instrum. 2017, 88, 1–9. [Google Scholar] [CrossRef]
- Caponetto, R.; Luca, V.D.; Graziani, S. A multiphysics model of IPMC actuators dependence on relative humidity. In Proceedings of the 2015 IEEE International Instrumentation and Measurement Technology Conference (I2MTC) Proceedings, Pisa, Italy, 11–14 May 2015; pp. 1482–1487. [Google Scholar]
- Kim, M.H.; Kim, K.Y.; Lee, J.H.; Jho, J.Y.; Kim, D.M.; Rhee, K.; Lee, S.J. An experimental study of force control of an IPMC actuated two-link manipulator using time-delay control. SmartMater. Struct. 2016, 25, 117–130. [Google Scholar] [CrossRef]
- Khawwaf, J.; Zheng, J.; Al-Cihanimi, A.; Man, Z.; Nagarajah, R. Modeling and tracking control of an IPMC actuator for underwater applications. In Proceedings of the 2016 International Conference on Advanced Mechatronic Systems (ICAMechS), Melbourne, VIC, Australia, 30 November–3 December 2016; pp. 550–554. [Google Scholar]
- Bernat, J.; Kolota, J. Adaptive observer-based control for an IPMC actuator under varying humidity conditions. SmartMater. Struct. 2018, 27, 55–64. [Google Scholar] [CrossRef]
- Sainag, T.L.; Sujoy, M. Optimal position control of ionic polymer metal composite using particle swarm optimization. In Proceedings of the SPIE 20th Conference on Electroactive Polymers Actuators and Devices, Denver, CO, USA, 27 March 2018; Volume 18, pp. 1059–1068. [Google Scholar]
- Darnag, R.; Minaoui, B.; Fakir, M. QSAR models for prediction study of HIV protease inhibitors using support vector machines, neural networks and multiple linear regression. Arabian J. Chem. 2017, 10, S600–S608. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Zhang, X.; Xu, M.; Xie, S. Hybrid model based on preisach and support vector machine for novel dual-stack piezoelectric actuator. Mech. Syst. Signal Process. 2013, 34, 156–172. [Google Scholar] [CrossRef]
- Wong, P.K.; Xu, Q.; Vong, C.M.; Wong, H.C. Rate-dependent hysteresis modeling and control of a piezostage using online support vector machine and relevance vector machine. IEEE Trans. Ind. Electron. 2012, 59, 1988–2001. [Google Scholar] [CrossRef]
- Mao, X.; Wang, Y.; Liu, X.; Guo, Y. An adaptive weighted least square support vector regression for hysteresis in piezoelectric actuators. Sens. Actuators A Phys. 2017, 263, 423–429. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Bouzerdoum, A.; Phung, S. A Training algorithm for sparse LS-SVM using compressive sampling. In Proceedings of the IEEE International Conference on Acoustics, Speech, and Signal Processing, Dallas, TX, USA, 14–19 March 2010; pp. 2054–2057. [Google Scholar]
- Napoli, R.; Piroddi, L. Nonlinear active noise control with NARX models. IEEE Trans. Audio Speech Lang. Process. 2010, 18, 286–295. [Google Scholar] [CrossRef]
- Sahoo, H.K.; Dash, P.K.; Rath, N.P. NARX model based nonlinear dynamic system identification using low complexity neural networks and robust H∞ filter. Appl. Soft Comput. 2013, 13, 3324–3334. [Google Scholar] [CrossRef]
- Wang, H.; Song, G. Innovative NARX recurrent neural network model for ultra-thin shape memory allow wire. Neurocomputing 2014, 134, 289–295. [Google Scholar] [CrossRef]
- Asgari, H. NARX models for simulation of the start-up operation of a single-shaft gas turbine. Appl. Therm. Eng. 2016, 93, 368–376. [Google Scholar] [CrossRef]
- Mao, X.F.; Wang, Y.J.; Liu, X.D. A hybrid feedforward-feedback hysteresis compensator in piezoelectric actuators based on least-squares support vector machine. IEEE Trans. Ind. Electron. 2018, 65, 5704–5711. [Google Scholar] [CrossRef]
- Xu, Q. Identification and compensation of piezoelectric hysteresis without modeling hysteresis inverse. IEEE Trans. Ind. Electron. 2013, 60, 3927–3937. [Google Scholar] [CrossRef]
- Al Janaideh, M.; Rakotondrabe, M.; Aljanaidwh, O. Further Results on Hysteresis Compensation of Smart Micropositioning Systems with the Inverse Prandtl-Ishlinskii Compensator. IEEE Trans. Control Syst. Technol. 2015, 24, 428–439. [Google Scholar] [CrossRef]
- Jiang, C.; Deng, M.; Inoue, A. A novel modeling of nonlinear plants with hysteresis described by non-symmetric play operator. In Proceedings of the 7th World Congress on Intelligent Control and Automation, Chongqing, China, 25–27 June 2008; pp. 2221–2224. [Google Scholar]
- Guzman, S.M.; Paz, J.O.; Tagert, M.L.M.; Mercer, A.E. Evaluation of seasonally classified inputs for the prediction of daily groundwater levels: NARX networks vs support vector machines. Environ. Modeling Assess. 2019, 24, 223–234. [Google Scholar] [CrossRef]
- Ezzeldin, R.; Hatata, A. Application of NARX neural network model for discharge prediction through lateral orifices. Alex. Eng. J. 2018, 54, 2991–2998. [Google Scholar] [CrossRef]
- Jaleel, E.A.; Aparna, K. Identification of realistic distillation column using NARX based hybrid artificial neural network and artificial bee colony algorithm. J. Intell. Fuzzy Syst. 2018, 34, 2075–2086. [Google Scholar] [CrossRef]
- Avellina, M.; Brankovic, A.; Piroddi, L. Distributed randomized model structure selection for NARX models. Int. J. Adapt. Control Signal Process. 2017, 31, 1853–1870. [Google Scholar] [CrossRef]
- Suykens, J.A.K.; Vandewalle, J. Least squares support vector machine classifiers. Neural Process. Lett. 1999, 9, 293–300. [Google Scholar]
- Kaytez, F.; Taplamacioglu, M.C.; Cam, E.; Hardalac, F. Foreacsting electricity consumption: A comparison of regression analysis, neural networks and least squares support vector machine. Int. J. Electr. Power Energy Syst. 2015, 67, 431–438. [Google Scholar] [CrossRef]
- Cao, L.J.; Tay, F.H. Support vector machine with adaptive parameters in financial time series forcasting. IEEE Trans. Neural Netw. 2003, 14, 1506–1518. [Google Scholar] [CrossRef]
- Karaboga, D. AnIdea Based on Honey Bee Swarm for Numerical Optimization; Technical Report; Computers Engineering Department, Engineering Faculty, Eriyes University: Kayseri, Turkey, 2005. [Google Scholar]
- Tereshko, V.; Loengarov, A. Collective decision-making in honeybee foraging dynamics. Comput. Inf. Syst. J. 2005, 9, 1–7. [Google Scholar]





















































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Amplitude of Actuating Voltage (V) | 1 | 2 | 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Frequency of actuating voltage (Hz) | 0.5/2π | 1/2π | 5/2π | 0.5/2π | 1/2π | 5/2π | 0.5/2π | 1/2π | 5/2π |
| Lower limit of tip displacements (mm) | −0.9873 | −1.1276 | −1.1993 | −2.5604 | −3.9327 | −2.487 | −4.7787 | −8.7983 | −6.1326 |
| Upper limit of tip displacements (mm) | 0.8256 | 0.8923 | 0.8134 | 1.988 | 2.3796 | 2.7003 | 2.6328 | 2.5967 | 2.7528 |
| Range of tip displacements (mm) | 1.8129 | 2.0199 | 2.0127 | 4.5484 | 6.3123 | 5.1873 | 7.4115 | 11.395 | 8.8854 |
| a1 | a2 | a3 | a4 | a5 | a6 | a7 | a8 | a9 | a10 | |
| Value | 2.446 | −8.8831 | −2.5468 | −5.3785 | 7.4586 | −8.13 | 3.711 | 4.986 | 2.3852 | 10 |
| r1 | r2 | r3 | r4 | r5 | r6 | r7 | r8 | r9 | r10 | |
| Value | 4.2268 | −10 | −4.2276 | 2.6812 | 6.3775 | 10 | −7.9211 | 10 | −10 | −3.8301 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L.; Hu, Y.; Zhao, Y.; Li, Y. Modeling and Control of IPMC Actuators Based on LSSVM-NARX Paradigm. Mathematics 2019, 7, 741. https://doi.org/10.3390/math7080741
Huang L, Hu Y, Zhao Y, Li Y. Modeling and Control of IPMC Actuators Based on LSSVM-NARX Paradigm. Mathematics. 2019; 7(8):741. https://doi.org/10.3390/math7080741
Chicago/Turabian StyleHuang, Liangsong, Yu Hu, Yun Zhao, and Yuxia Li. 2019. "Modeling and Control of IPMC Actuators Based on LSSVM-NARX Paradigm" Mathematics 7, no. 8: 741. https://doi.org/10.3390/math7080741