1. Introduction
The inversion problem on mathematical physics equations is an important branch in mathematics. The inversion of surface parameters in remote sensing science, the invention and application of CT in medical imaging, the reconstruction of optical signals and the geomorphological exploration in geological exploration are all related to such inversion problems [
1].
There are many research methods and results for the Helmholtz equation for a positive wave number. The Helmholtz equation of a pure imaginary wave number is called the modified Helmholtz equation (also known as the Yukawa equation). It usually appears in the semi-implicit time-discrete heat equation and is also used to describe the physical phenomena of wave dispersion and diffusion [
2]. A number of numerical solutions in the direct problem for the modified Helmholtz equation have been proposed [
3,
4], however, its inverse problem is severely ill-posed or improperly-posed in the viewpoint of Hadamard [
5], the Cauchy problem suffers from the instability of the solution in the sense that a minor disturbance in the input data may cause a tremendous deviation in the solution [
6]. To establish an accurate, stable, reliable and fast numerical algorithm for the Cauchy problem is a considerably interesting topic. It is impossible to solve this problem by using classical numerical methods, such as the finite element method (FEM), finite difference method (FDM) and finite volume method (FVM). It requires special techniques, and some different approaches had been given of an account of on the published literature, for instance, the Landweber method with boundary element method (BEM) [
7], the conjugate gradient method [
8], the method of fundamental solutions (MFS) [
9], the Fourier regularization method [
10], the truncation method [
11] and the mollification method [
12,
13].
The kernel functions, such as Féjer kernel, Weierstrass kernel, Bessel-MacDonald kernel, de la Vallée Poussin kernel, Dirichlet and Krein kernel have a wide range of applications [
12]. Manselli, Miller [
13] and Murio [
14] adopted the mollification method with the Weierstrass kernel to construct regularization operators to solve some inverse problems, but their methods were suitable for the case of Hilbert space
, furthermore they could not find appropriate regularization parameters. Hào [
15] generalized their works, not only in Hilbert spaces, but also in Banach spaces with de la Vallée Poussin kernel and Dirichlet kernel. He applied the mollification method to concrete problems, such as the Cauchy problem of the Laplace equation, numerical differentiation and some parabolic equations. In recent years, inspired by Murio’s work [
16], there are some research results for the mollification method with Gaussian kernel to solve Cauchy problem of elliptic equations [
17,
18,
19].
In this paper, a mollification regular method with the de la Vallée Poussin kernel is introduced to solve the Cauchy problem for a Helmholtz-type equation; our approximation is to transform the ill-posed problem into a well-posed problem by convoluting the de la Vallée Poussin function and the measured data. We consider the following two problems:
and
where
is a two-dimensional Laplace operator,
,
are given vectors in
, and
are unknown vectors. The constant
k is the wave number.
Let
, where
u and
v are solution of problems (1) and (2), respectively. Then
w is the solution of the following Cauchy problem with the inhomogeneous Neumann boundary condition:
where
.
We assume that all the functions involved are
functions in
, Additionally suppose that input functions
,
and its measurement data
,
satisfy
where
denotes noise level, and
denotes the
norm.
Assume there exits a constant
, such that the following
a priori bound holds:
The rest of this paper is organized as follows. In
Section 2, we illuminate the ill-posed nature of problems (1) and (2), the de la Vallée Poussin kernel and some properties are presented to obtain the regularization solution. In
Section 3, some error estimates are given for
and at the boundary
under the suitable choices of regularization parameter.
Section 4 is the numerical aspect of our proposed algorithm. Some conclusions are given in
Section 5.
2. Description of the Problem and Mollification Method
Let us introduce the Sobolev space
[
15] with
, and if
, then
,
, where
with the Fourier transform
Additionally, the inverse Fourier transform for the variable
In this paper, we denote
.
For any function
and
,
, the convolution is defined by [
15]
It is well known that [
16]
and
and the Parseval equality [
15]
2.1. Ill-posed Analysis
Applying the Fourier transform to problems (1) and (2). with respect to the variable
y, we obtain the following problems:
and
The solution of problem (11) is
or equivalently,
The solution of problem (12) is
or equivalently,
Apparently, the factors
and
are unbounded with respect to variable
, a small perturbation in the measured data
and
may arouse a tremendously large error in the solutions
and
, respectively. Therefore, problems (1), (2) and (3) are severely ill-posed [
5].
2.2. Mollification Method
This paper is devoted to establishing a mollification method, constructing mollification operator by convolution with the de la Vallée Poussin kernel and measurement data, as thus the ill-posed problems are transformed into well-posed problems.
The function
is called the de la Vallée Poussin kernel [
15]. Here,
is called mollification radius or mollification parameter, and
has the following properties [
15].
(1) is an exponential type entire function of degree relative variable t, bounded and summable on ;
(2)
is the Fourier transform of
and satisfies
(3) ;
(4) .
We define the operator
by
The Cauchy problems (1) and (2) can be stabilized, if instead of attempting to find the values of the function
,
, we shall reconstruct the
mollification of the function
,
, given by
,
. We have the following problems with the mollified data:
and
where
and
denote the solution of problems (13) and (14), respectively.
The solution of problem (13) is
equivalently
The solution of problem (14) is
equivalently
According to the property (3) of kernel function
, we have
From (9) and property (4) of
, we get
Remark 1. Assumption that condition (4) is valid, when , we have 3. Error Estimate and Parameter Selection
Lemma 1. For , the following inequalities hold.
(1) ;
(2) ;
(3) ;
(4) .
Proof. Using inequality , the proofs of (3) and (4) can be obtained. Therefore, we only prove (1) and (2).
From inequality,
inequality (1) can be arrived at.
By the Taylor’s expansion,
we obtain (2). □
In the following, we will give error estimate for , and in and at boundary , respectively. The convergence results will be obtained while we choose a suitable regular parameter .
3.1. Approximation Theorems
In this section, we shall give the stable estimates of the proposed regularization method for the case of .
Theorem 1. Let be the exact solution of problem (1) with the exact input data , and let be the regularized solution of problem (13) with the noisy data . Assume that conditions (4) and (5) hold, we have the following estimate: Furthermore, if we select regular parameter α aswe obtain Proof. Suppose that conditions (4) and (5) hold, using Parseval formula (10), we have
where
If , then .
According to Minkowski inequality, there is
where,
From items (3) and (4) of Lemma 1, we have
Using inequality
, we obtain
Choosing the parameter as (16), then (17) holds. □
Similarly, we have the following error estimate for problem (2).
Theorem 2. Let be the exact solution of problem (2) with the exact input data , and let be the regularized solution of problem (14) with the noisy data . Assume that conditions (4) and (5) hold, we have the following estimate: Furthermore, if we select regular parameter α as (16), then Moreover, according to the results of Theorems 1 and 2 and Minkowski inequality, we get the Theorem 3 as follows.
Theorem 3. Let be the exact solution of problem (3) with the exact input data , , and let be its approximate solution with the noisy data , . Assume that conditions (4) and (5) hold, we have the following estimate: Furthermore, if we select regular parameter α as (16), then 3.2. Approximation Estimate at Boundary
Note that the error estimates in above section only solve our problems for
and do not give any useful information at
. In order to obtain the stability estimates of problems (1) and (2) at
, we need a stronger
a priori assumption instead of (5):
where constant
dependents only on
r.
Theorem 4. Let be the solution of the Cauchy problem (1) and be solution of modified problem (13) at . Suppose that conditions (4) and (22) hold, we have Proof. From equality (10), adoption similar analysis method with Theorem 1, we have
where
Applying (4) of Lemma 1, we have
Taking regularization parameter as (24), then (25) holds. □
Similarly, combining (2) of Lemma 1, we have error estimation of problem (2) at boundary .
Theorem 5. Let be the solution of the Cauchy problem (2) and be the solution of modified problem (14) at . Suppose that conditions (4) and (22) hold, we have If we select α as (24), then According the results of Theorem 4, Theorem 5 and Minkowski inequality, we get the following approximate estimate of problem (3).
Theorem 6. Let be the solution of the Cauchy problem (3) and be its approximation solution at . Suppose that conditions (4) and (22) hold, we have If we select α as (24), then 4. Numerical Aspect
In this section, in order to test the feasibility and stability of our method, two numerical results are proposed. Numerical experiments are performed by MATLAB R2014b (MathWorks, Natick, MA, USA).
In the numerical examples, we select the discrete interval as
, the measurement data
and
are obtained as follows
where
Function ’’ generates arrays of random numbers whose elements are normally disturbed with mean 0, variance .
The error level
is given by
In numerical examples, we need to take the discrete Fourier transform of the data vector
as follows
And the discrete Fourier transform of
,
where
,
,
, and
N is the total test points at y-axis.
To measure the accuracy of the numerical solution
, we define relative error
between the exact solution
u and approximate solution
:
In following numerical experiments, we always take , , and fix the reconstructed position , the a priori mollification parameter is determined by (16).
Example 1. It’s easy to verify that functionis the exact solution of problem (2), where . Example 2. Apparently, the functionis the exact solution of problem (1), where . To verify the stability of our method, different noisy levels for
,
are presented, respectively.
Table 1 and
Table 2 show the results associated with different error levels
of Example 1 and 2. Note that the relative error depends not only on error level
but also on wave number
k. However, due to the characteristic of the selected parametric formula, the numerical results show that the optimal range of error level within
and
.
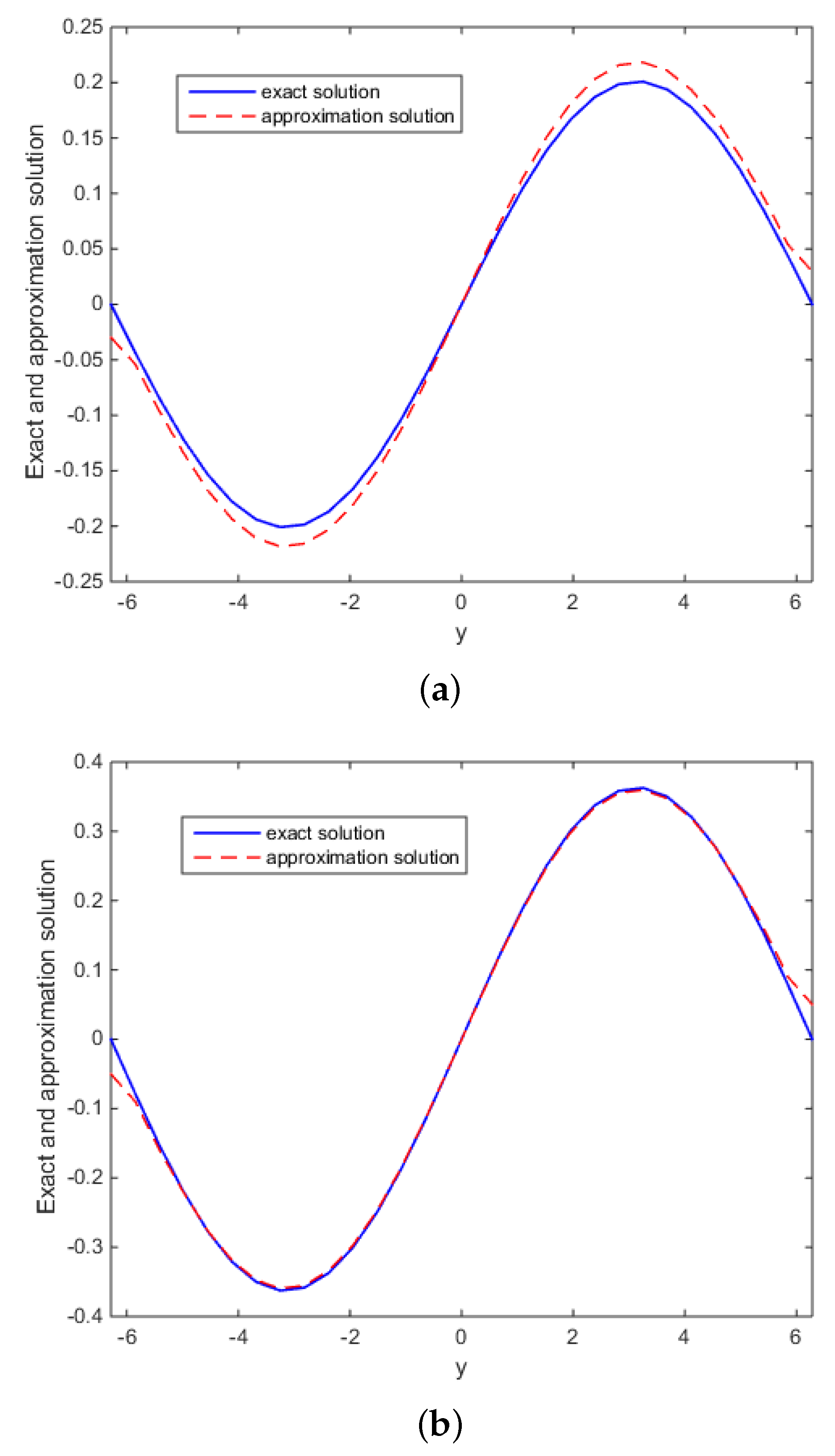
Figure 1 shows the reconstructed solution and exact solution for Example 1 corresponding to noise levels
,
with
and
, respectively.
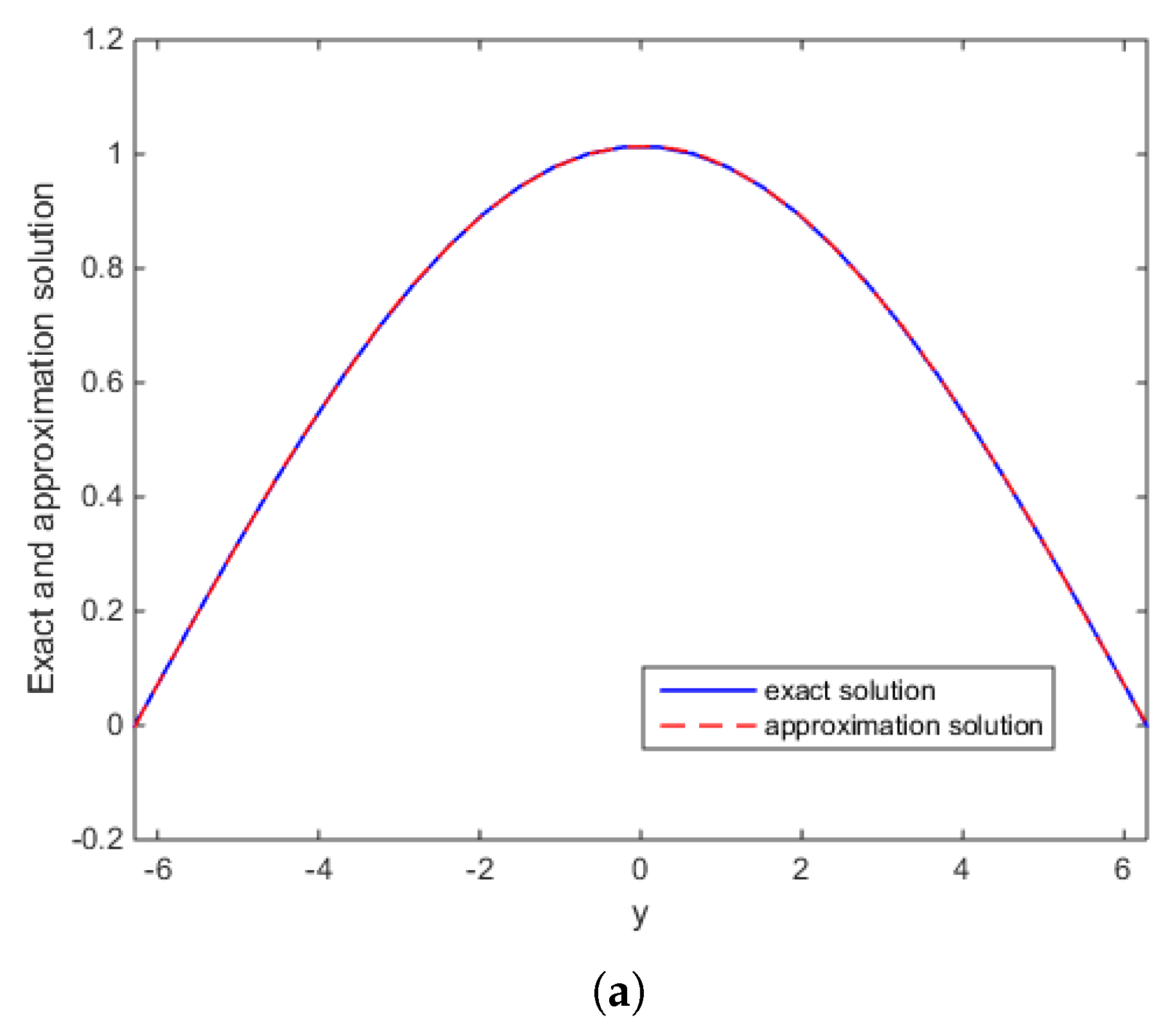
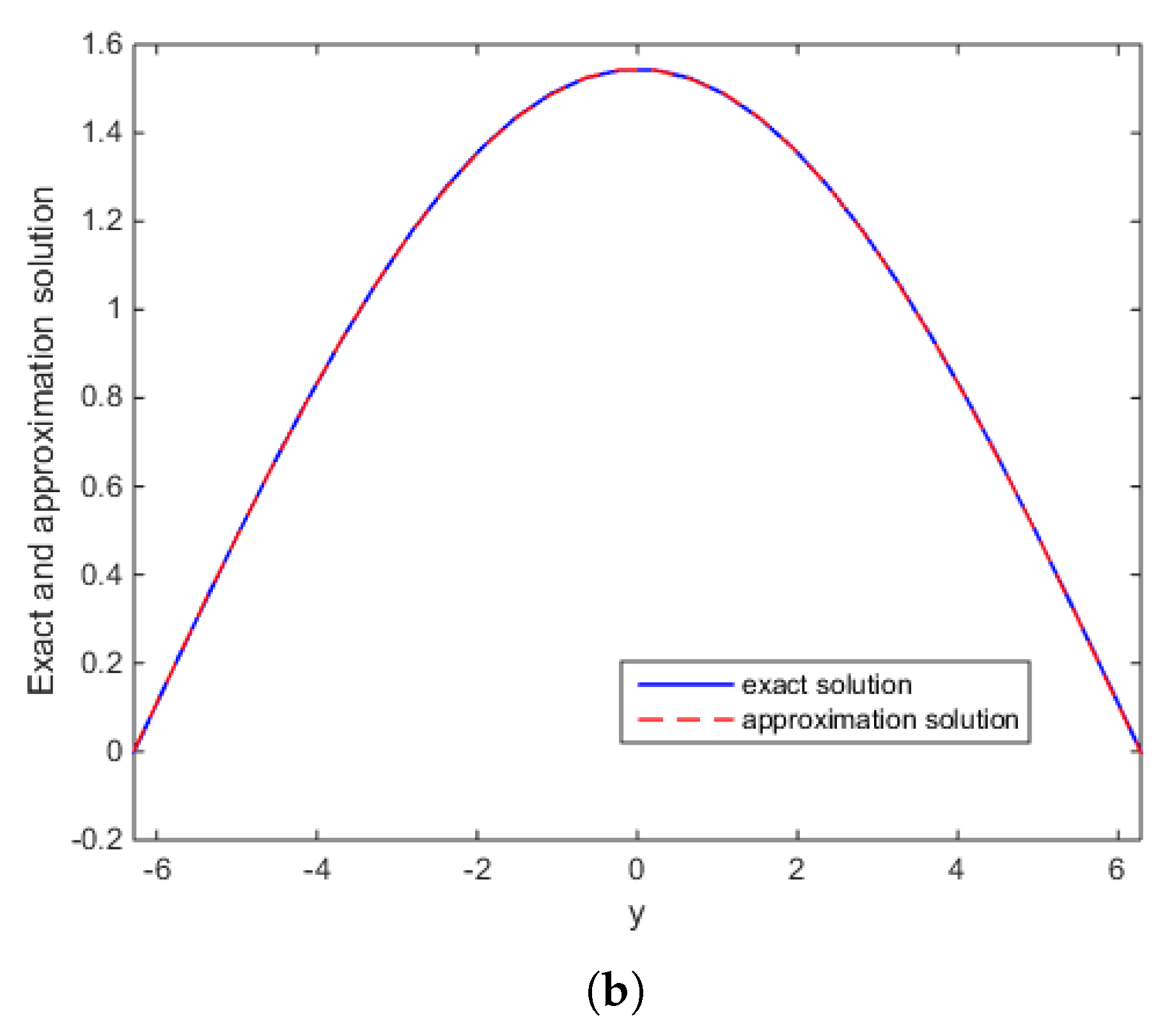
Figure 2 shows the reconstructed solution and exact solution for Example 2 corresponding to noise levels
with
and
. Note that the proposed method is effective and stable to noisy data.
Remark 2. In above two examples, the value of wave number k which we take is relatively small. In fact, when , the result is still valid, when , the relative error will gradually increase, and the fitting effect will become more and more undesirability. Moreover, if we take N to be odd, there will be singularities, in this case, instead of , we consider interval , where is the number of disturbance.
5. Conclusions
In this paper, a mollification method with the de la Vallée kernel for solving a Cauchy problem of the Helmholtz-type equation in a strip domain is proposed; the stable approximate estimates are obtained. Two numerical examples are investigated, and the relative errors between the regularization solution and the exact solution are presented. The numerical examples do verify the numerical efficiency and stability of our method. Furthermore, the accuracy of the procedure is quite acceptable, if noise levels are within and .
However, the selection of regular parameters in this paper depends on the given function. In fact, we always obtain discrete data onto observation, the formulas for calculating parameters in this paper are no longer applicable. At this time, we use the Golden Section Search method to calculate parameters , which we will use in later papers.






{kind=link}
{kind=link}
{kind=link}