This subsection shows how our truncated exponential radial basis function (TERBF) works at a single level. Our first 2D target surface is the standard Franke’s function. In the experiments, we let the kernel
in (7) be the truncated exponential radial function
. A Halton point set with increasingly greater data density is generated in domain
.
Table 1,
Table 2,
Table 3,
Table 4,
Table 5,
Table 6,
Table 7 and
Table 8 list the test results of Gaussian interpolation, MQ (Multiquadrics) interpolation, IMQ (Inverse Multiquadrics) interpolation, and TERBF interpolation with different values of
respectively. In the tables, the RMS-error is computed by
where
are the evaluation points. The rate listed in the Tables is computed using the formula:
where
is the RMS-error for experiment number
k and
is the fill distance of the
k-level.
is the condition number of the interpolation matrix defined by (8). From
Table 1,
Table 2,
Table 3,
Table 4,
Table 5 and
Table 6, we observe that the globally supported radial basis functions (Gaussian, MQ, IMQ) can obtain ideal accuracy when assembling a smaller value of
. However, the condition number of the interpolation matrix will become surprisingly large as the scattered data increase. We note that MATLAB issues a “matrix close to singular” warning when carrying out Gaussian and MQ interpolation experiments for
and
.
Table 7 and
Table 8 show that TERBF interpolation can not only keep better approximation accuracy, but also produce a well conditioned interpolation matrix. Even for
and
, the condition number of the presented method is relatively smaller (about
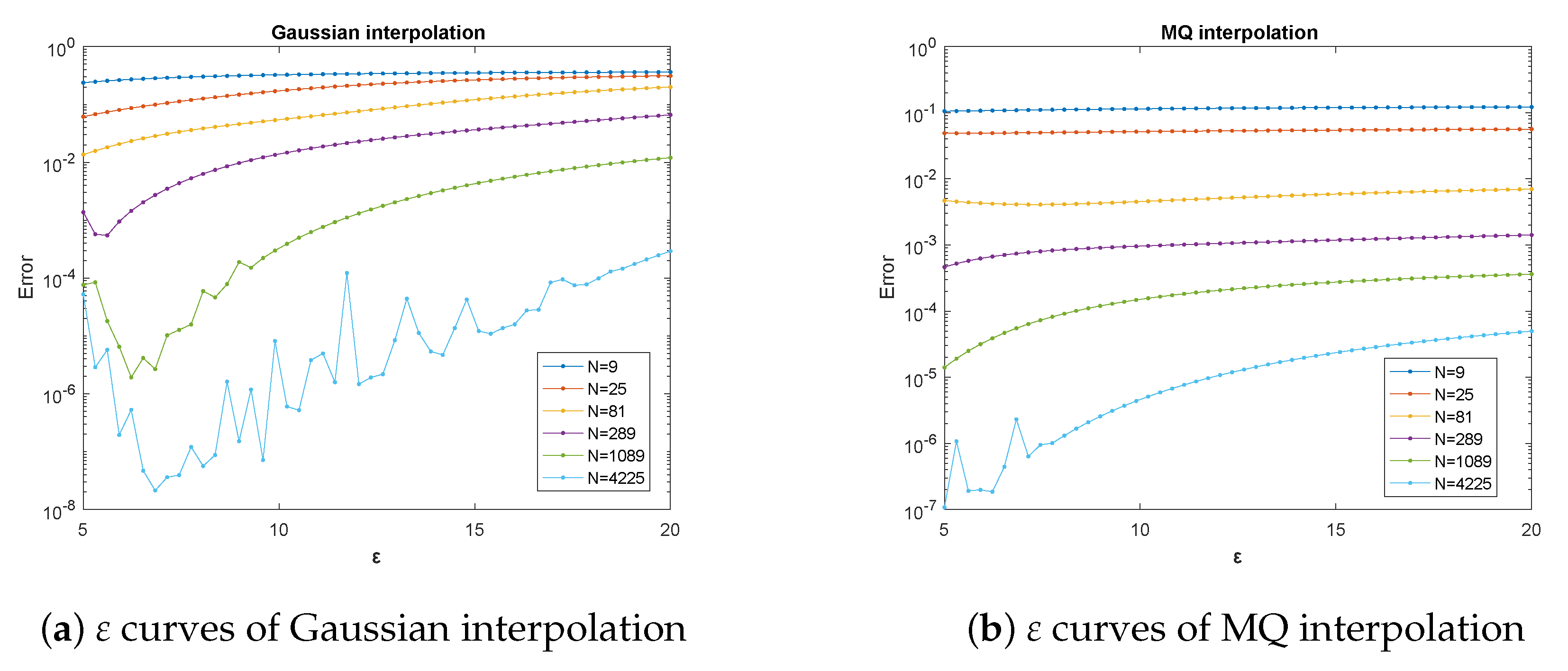
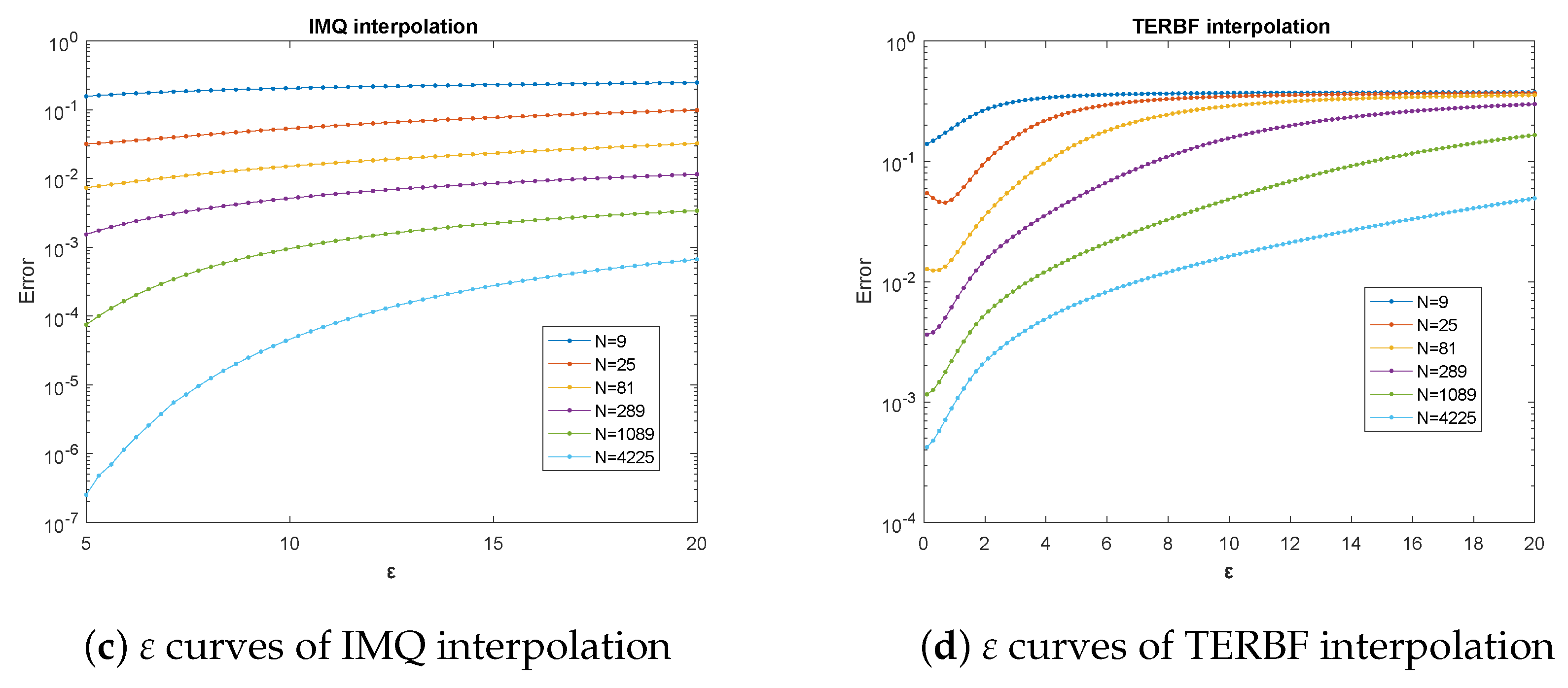
). The change of RMS-error with varying
values is displayed in
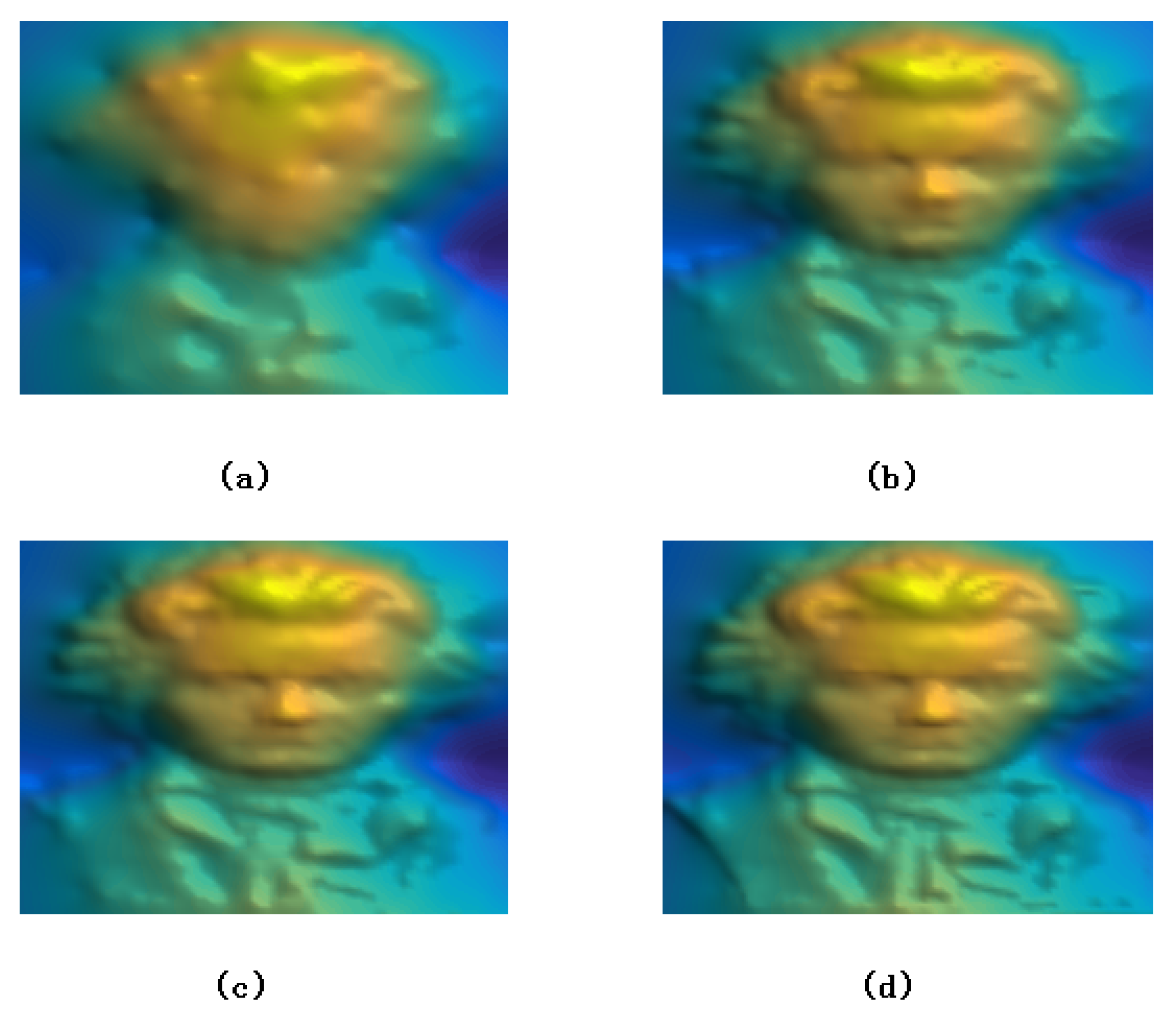
Figure 1. We see that the error curves of Gaussian and MQ interpolation are not monotonic and even become erratic for the largest datasets. However, the curves of IMQ and TERBF interpolation are relatively smooth. In particular, TERBF greatly improves the condition number of the interpolation matrix. To show the application of TERBF approximation to compact 3D images, we interpolate Beethoven data in
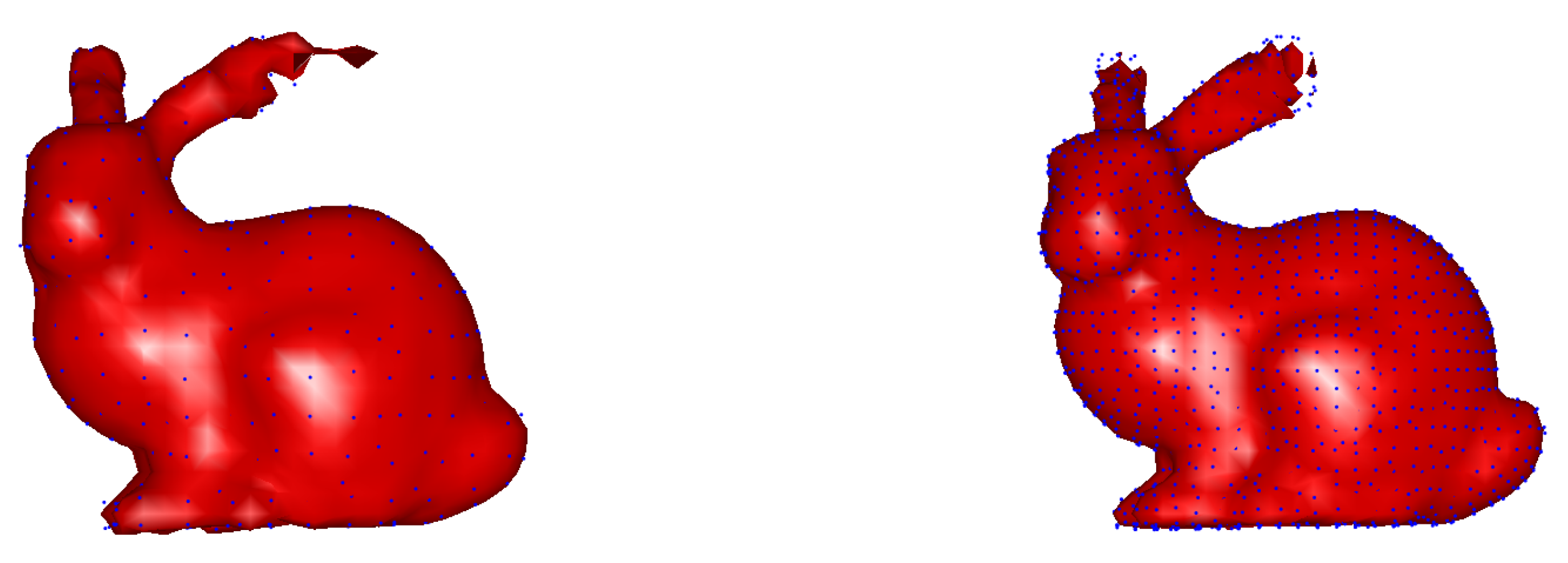
Figure 2 and Stanford bunny in
Figure 3. Numerical experiments suggest that TERBF interpolation is essentially faster than the scattered data interpolation with globally supported radial basis functions. However, we observe that TERBF interpolation causes some artifacts such as the extra surface fragment near the bunny’s ear from the left part of
Figure 3. This is because the interpolating implicit surface has a narrow band support. It will be better if the sample density is smaller than the width of the support band (see the right part of
Figure 3). Similar observations have been reported in Fasshauer’s book [
3], where a partition of unity fits based on Wendland’s
function was used. The same observation was also made in [
1].










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}