Convergence Analysis and Complex Geometry of an Efficient Derivative-Free Iterative Method



{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Local Convergence Analysis
- (a1)
- is a continuously differentiable operator and is a first divided difference operator of F.
- (a2)
- There exists so that and
- (a3)
- There exists a continuous and nondecreasing function with such that, for each ,
- (a4)
- Let , where r has been defined before. There exists continuous and nondecreasing function such that, for each ,
- (a5)
- and .
- (a6)
- Let and set ,
3. Numerical Examples
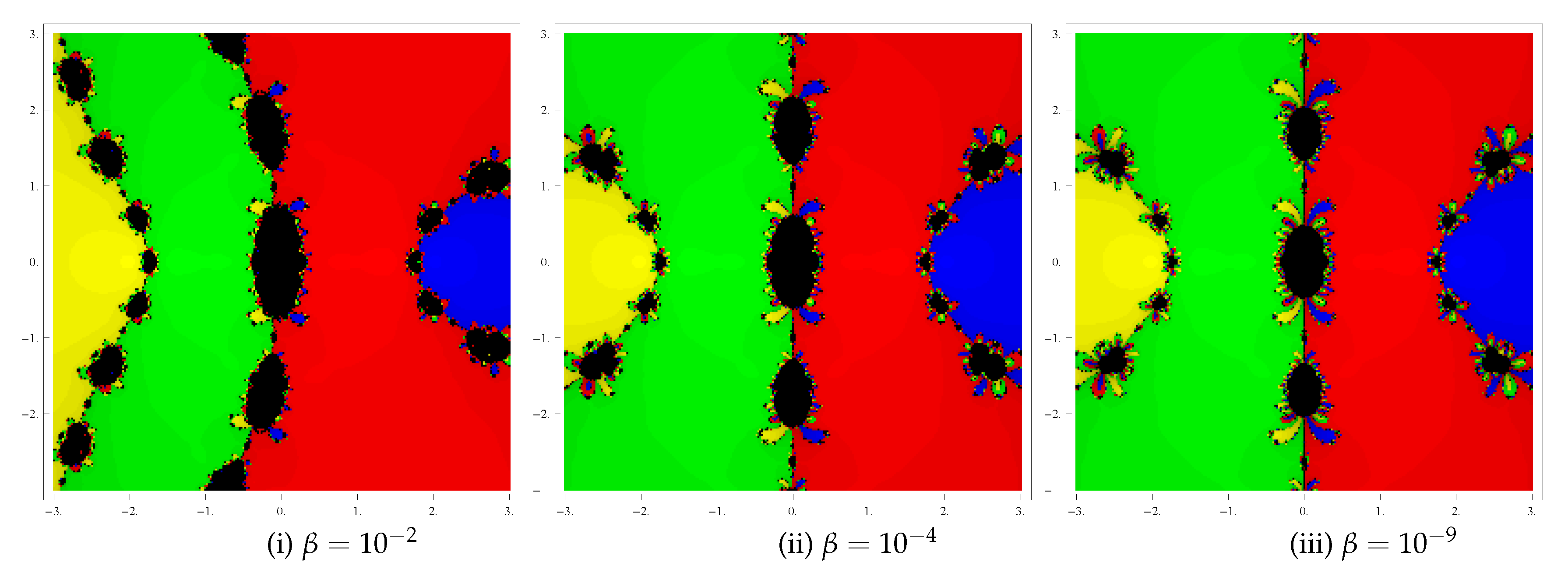
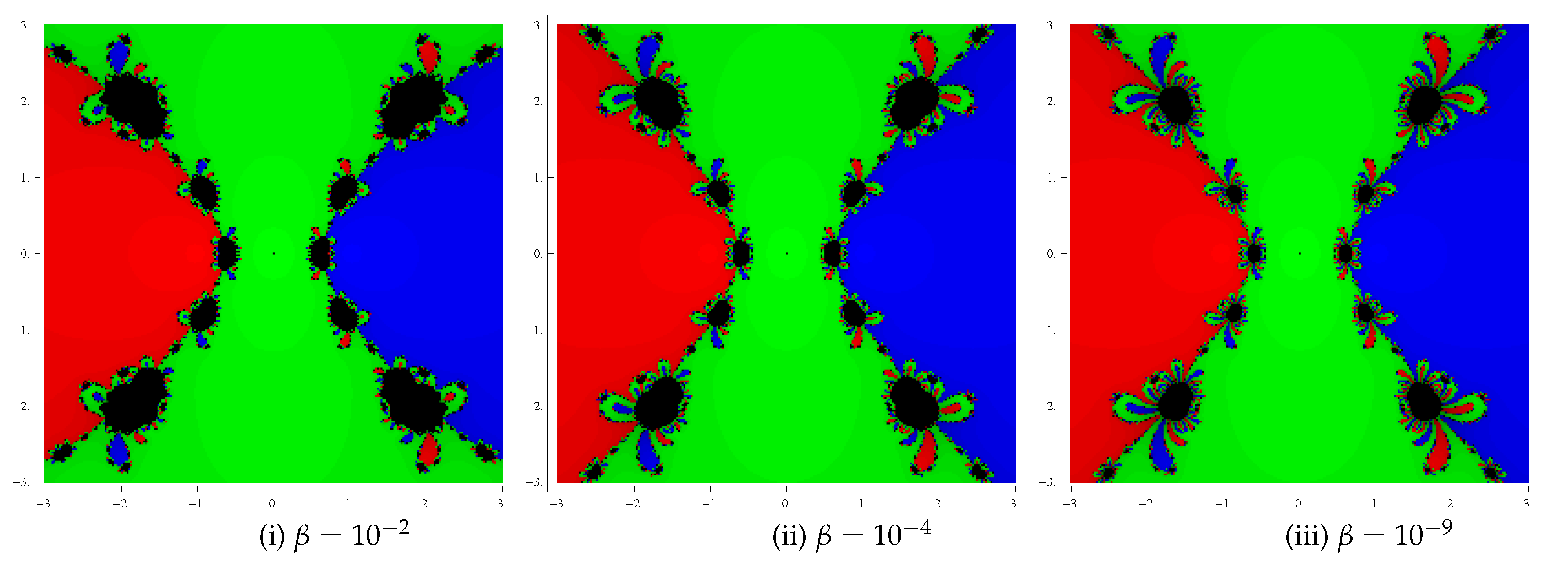
4. Basins of Attraction
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Banach, S. Théorie des Opérations Linéare; Monografje Matematyczne: Warszawna, Poland, 1932. [Google Scholar]
- Gupta, V.; Bora, S.N.; Nieto, J.J. Dhage iterative principle for quadratic perturbation of fractional boundary value problems with finite delay. Math. Methods Appl. Sci. 2019, 42, 4244–4255. [Google Scholar] [CrossRef]
- Jäntschi, L.; Bálint, D.; Bolboacă, S. Multiple linear regressions by maximizing the likelihood under assumption of generalized Gauss-Laplace distribution of the error. Comput. Math. Methods Med. 2016, 2016, 8578156. [Google Scholar] [CrossRef] [PubMed]
- Kitkuan, D.; Kumam, P.; Padcharoen, A.; Kumam, W.; Thounthong, P. Algorithms for zeros of two accretive operators for solving convex minimization problems and its application to image restoration problems. J. Comput. Appl. Math. 2019, 354, 471–495. [Google Scholar] [CrossRef]
- Sachs, M.; Leimkuhler, B.; Danos, V. Langevin dynamics with variable coefficients and nonconservative forces: From stationary states to numerical methods. Entropy 2017, 19, 647. [Google Scholar] [CrossRef]
- Behl, R.; Cordero, A.; Torregrosa, J.R.; Alshomrani, A.S. New iterative methods for solving nonlinear problems with one and several unknowns. Mathematics 2018, 6, 296. [Google Scholar] [CrossRef]
- Argyros, I.K.; George, S. Unified semi-local convergence for k-step iterative methods with flexible and frozen linear operator. Mathematics 2018, 6, 233. [Google Scholar] [CrossRef]
- Argyros, I.K.; Hilout, S. Computational Methods in Nonlinear Analysis; World Scientific Publishing Company: Hackensack, NJ, USA, 2013. [Google Scholar]
- Argyros, I.K. Computational Theory of Iterative Methods, Series: Studies in Computational Mathematics 15; Chui, C.K., Wuytack, L., Eds.; Elsevier: New York, NY, USA, 2007. [Google Scholar]
- Traub, J.F. Iterative Methods for the Solution of Equations; Prentice-Hall: Englewood Cliffs, NJ, USA, 1964. [Google Scholar]
- Potra, F.A.; Ptak, V. Nondiscrete Induction and Iterative Process; Research Notes in Mathematics; Pitman: Boston, MA, USA, 1984. [Google Scholar]
- Kantrovich, L.V.; Akilov, G.P. Functional Analysis; Pergamon Press: Oxford, UK, 1982. [Google Scholar]
- Candela, V.; Marquina, A. Recurrence relations for rational cubic methods I: The Halley method. Computing 1990, 44, 169–184. [Google Scholar] [CrossRef]
- Candela, V.; Marquina, A. Recurrence relations for rational cubic methods II: The Chebyshev method. Computing 1990, 45, 355–367. [Google Scholar] [CrossRef]
- Hasanov, V.I.; Ivanov, I.G.; Nebzhibov, G. A new modification of Newton’s method. Appl. Math. Eng. 2002, 27, 278–286. [Google Scholar]
- Kou, J.S.; Li, Y.T.; Wang, X.H. A modification of Newton’s method with third-order convergence. Appl. Math. Comput. 2006, 181, 1106–1111. [Google Scholar] [CrossRef]
- Ezquerro, J.A.; Hernández, M.A. Recurrence relation for Chebyshev-type methods. Appl. Math. Optim. 2000, 41, 227–236. [Google Scholar] [CrossRef]
- Chun, C.; Stănică, P.; Neta, B. Third-order family of methods in Banach spaces. Comput. Math. Appl. 2011, 61, 1665–1675. [Google Scholar] [CrossRef] [Green Version]
- Hernández, M.A.; Salanova, M.A. Modification of the Kantorovich assumptions for semilocal convergence of the Chebyshev method. J. Comput. Appl. Math. 2000, 126, 131–143. [Google Scholar] [CrossRef] [Green Version]
- Amat, S.; Hernández, M.A.; Romero, N. Semilocal convergence of a sixth order iterative method for quadratic equations. Appl. Numer. Math. 2012, 62, 833–841. [Google Scholar] [CrossRef]
- Babajee, D.K.R.; Dauhoo, M.Z.; Darvishi, M.T.; Barati, A. A note on the local convergence of iterative methods based on Adomian decomposition method and 3-node quadrature rule. Appl. Math. Comput. 2008, 200, 452–458. [Google Scholar] [CrossRef]
- Ren, H.; Wu, Q. Convergence ball and error analysis of a family of iterative methods with cubic convergence. Appl. Math. Comput. 2009, 209, 369–378. [Google Scholar] [CrossRef]
- Ren, H.; Argyros, I.K. Improved local analysis for certain class of iterative methods with cubic convergence. Numer. Algor 2012, 59, 505–521. [Google Scholar] [CrossRef]
- Argyros, I.K.; Hilout, S. Weaker conditions for the convergence of Newton’s method. J. Complexity 2012, 28, 364–387. [Google Scholar] [CrossRef]
- Gutiérrez, J.M.; Magreñán, A.A.; Romero, N. On the semilocal convergence of Newton–Kantorovich method under center-Lipschitz conditions. Appl. Math. Comput. 2013, 221, 79–88. [Google Scholar] [CrossRef]
- Argyros, I.K.; Sharma, J.R.; Kumar, D. Local convergence of Newton–Gauss methods in Banach space. SeMA 2016, 74, 429–439. [Google Scholar] [CrossRef]
- Behl, R.; Salimi, M.; Ferrara, M.; Sharifi, S.; Alharbi, S.K. Some real-life applications of a newly constructed derivative free iterative scheme. Symmetry 2019, 11, 239. [Google Scholar] [CrossRef]
- Salimi, M.; Nik Long, N.M.A.; Sharifi, S.; Pansera, B.A. A multi-point iterative method for solving nonlinear equations with optimal order of convergence. Jpn. J. Ind. Appl. Math. 2018, 35, 497–509. [Google Scholar] [CrossRef]
- Sharma, J.R.; Kumar, D. A fast and efficient composite Newton-Chebyshev method for systems of nonlinear equations. J. Complexity 2018, 49, 56–73. [Google Scholar] [CrossRef]
- Sharma, J.R.; Arora, H. On efficient weighted-Newton methods for solving systems of nonlinear equations. Appl. Math. Comput. 2013, 222, 497–506. [Google Scholar] [CrossRef]
- Lofti, T.; Sharifi, S.; Salimi, M.; Siegmund, S. A new class of three-point methods with optimal convergence order eight and its dynamics. Numer. Algor. 2015, 68, 261–288. [Google Scholar] [CrossRef]
- Sharma, J.R.; Kumar, D.; Jäntschi, L. On a reduced cost higher order Traub–Steffensen-like method for nonlinear systems. Symmetry 2019, 11, 891. [Google Scholar] [CrossRef]
- Grabnier, J.V. Who gave you the epsilon? Cauchy and the origins of rigorous calculus. Am. Math. Mon. 1983, 90, 185–194. [Google Scholar] [CrossRef]


© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, D.; Sharma, J.R.; Jäntschi, L. Convergence Analysis and Complex Geometry of an Efficient Derivative-Free Iterative Method. Mathematics 2019, 7, 919. https://doi.org/10.3390/math7100919
Kumar D, Sharma JR, Jäntschi L. Convergence Analysis and Complex Geometry of an Efficient Derivative-Free Iterative Method. Mathematics. 2019; 7(10):919. https://doi.org/10.3390/math7100919
Chicago/Turabian StyleKumar, Deepak, Janak Raj Sharma, and Lorentz Jäntschi. 2019. "Convergence Analysis and Complex Geometry of an Efficient Derivative-Free Iterative Method" Mathematics 7, no. 10: 919. https://doi.org/10.3390/math7100919