1. Introduction
Due to the growing demand for transportation, the fossil fuel reserves for crude oil, ethanol, petrol, and diesel are being depleted daily [
1]. As a result, their prices are rising, which is a driving force behind the transition to alternative-fuel vehicles, such as electric vehicles. These alternative-fuel vehicles need energy storage systems (ESSs) to store energy [
2], and several types of ESSs, including supercapacitors, flywheels, and batteries, are implemented [
3]. ESSs are highly demanded to reduce the carbon footprint and reliance on fossil fuels in transportation [
4]. Supercapacitors are large-capacity capacitors with energy storage capacities ten to one hundred times greater than conventional capacitors [
5].
However, because of their rapid charge and discharge rates, they are not suitable for long-term compact applications such as electric vehicles. Flywheels are mechanical storage devices that store energy as kinetic energy; however, because of mechanical issues, they are not ideal [
6]. The battery is an energy storage system for electric vehicles because all these other systems have drawbacks [
7]. The battery has many benefits, including the ability to store energy for an exceptionally long time, serve as a clean energy source, and be the most economical storage device [
7].
Batteries for electric vehicles can be made of nickel metal hydride, lead acid, nickel cadmium, or lithium-ion [
8,
9], due to their promised qualities as a new clean energy source, particularly in the sectors of electric-propelled train vehicles. Lithium-ion batteries have received much attention for their use in electric cars [
10]. While lithium-ion batteries have several benefits, including great energy, power density, a long lifespan, reduced weight, and quick charging [
11], they also have some drawbacks, including thermal runaway, age degradation at low temperatures, and overcharging and over-discharging performance [
12]. The main difficulties of a lithium-ion battery are that the lithium metal is extremely reactive due to its electron configuration. It has a long charging time. The main form of lithium corrosion is caused by dendrites, which are branched lithium structures that grow from the electrode and can pierce through the separator. While lithium-ion batteries are seen as sufficiently efficient, they still lack the range that would make EVs a viable alternative to the internal combustion engine. One of the most significant difficulties of lithium-ion batteries is the highly nonlinear and complex electrochemical nature that makes an accurate parameter estimation a difficult task that may lead to inaccurate
SOC estimation that causes overcharging and over-discharging that can damage the battery. Battery statuses, including state of charge (
SOC), state of health (SOH), state of life (SOL), and state of power (SOP) [
13], are tracked using the battery management system (BMS) to repair this harm [
14,
15]. The battery management system (BMS) is an electronic device with several features, including managing and monitoring the battery’s critical status, fault diagnosis, thermal management, preventing the battery from running outside of its safe operating range, keeping an eye on its states (
SOC, SOH, SOL, and SOP), computing and reporting the data, and controlling the environment [
16].
1.1. Problem under Study
Battery model parameter estimation has emerged as a significant obstacle to correctly modeling these components’ effects on the entire system’s operation. Finding the most appropriate prediction to simulate the battery is still an active area of research. Since the battery is presented in a nonlinear problem, the state of charge is a factor in this problem, which is a critical requirement for achieving the proper supervision and control of battery charging and discharging. The battery parameters are determined for the different modeling forms using experimental approaches. In addition, accurate prediction of the battery’s properties and SOC is essential for several reasons, including extending battery life, controlling the battery’s state of charge, improving battery performance, improving energy management, and monitoring and reporting on battery safety.
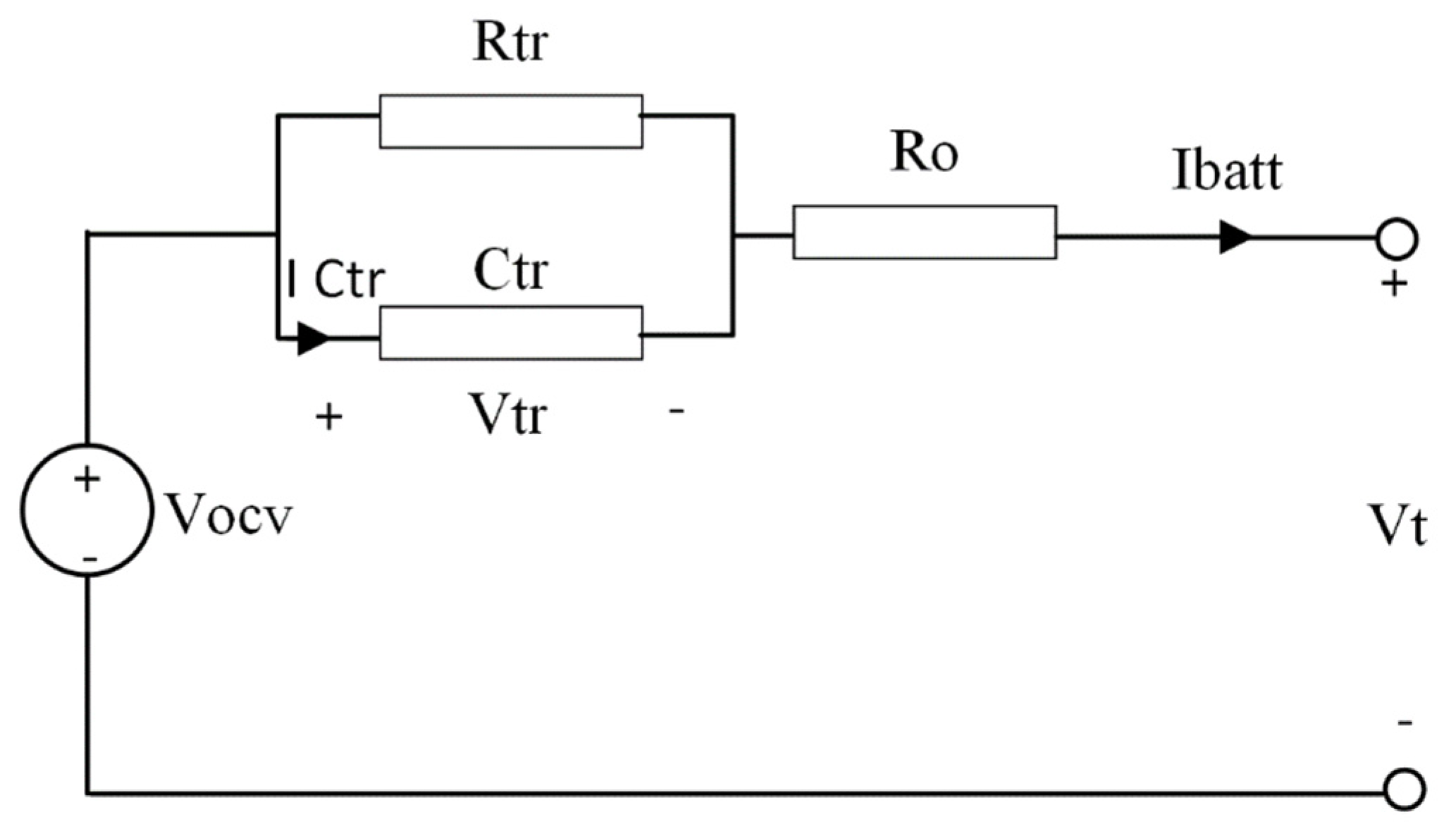
Lithium-ion battery modeling is carried out by estimating the parameters of the battery’s equivalent circuit: the battery’s internal resistance, the polarization branches consisting of resistances and capacitances, and the battery’s open-circuit voltage at different states of charge. The parameters of lithium-ion batteries need to be adequately estimated to extend the battery’s lifespan and to ensure the safe and dependable operation of lithium-ion batteries [
17]. To guarantee the safety, longevity, and optimum performance of the battery, the Li-ion battery needs precise parameter estimation of the battery since accurate parameter estimation for the battery results in minimizing the error between the real data and the experimental data, which results in accurate modeling for the battery which helps in the stage of studying the dynamic analysis of the battery [
18]. The main goal is to acquire an accurate parameter model for lithium-ion batteries by using a precise state space model produced from an equivalent electric circuit where the parameter identification process is nonlinear because of the high complexity of the electrochemical process inside the lithium-ion battery. The African vultures optimization algorithm (AVOA) was used to solve this problem by simulating African vultures’ foraging and navigating habits. The AVOA was used to implement this strategy and improve the quality of the solutions. Four scenarios varied between considering the loading and fading effect of a lithium-ion battery, and its dynamics were considered. The
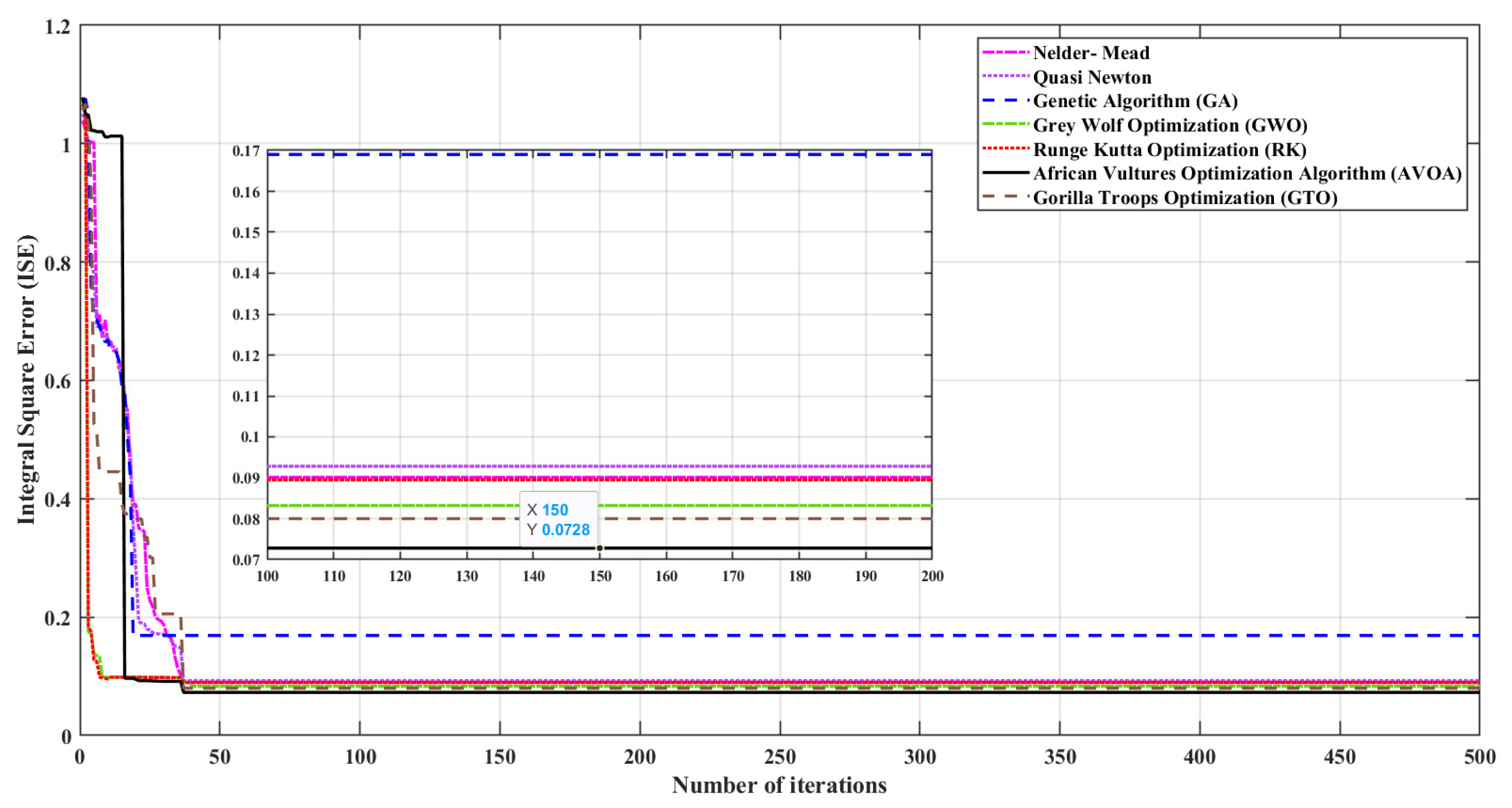
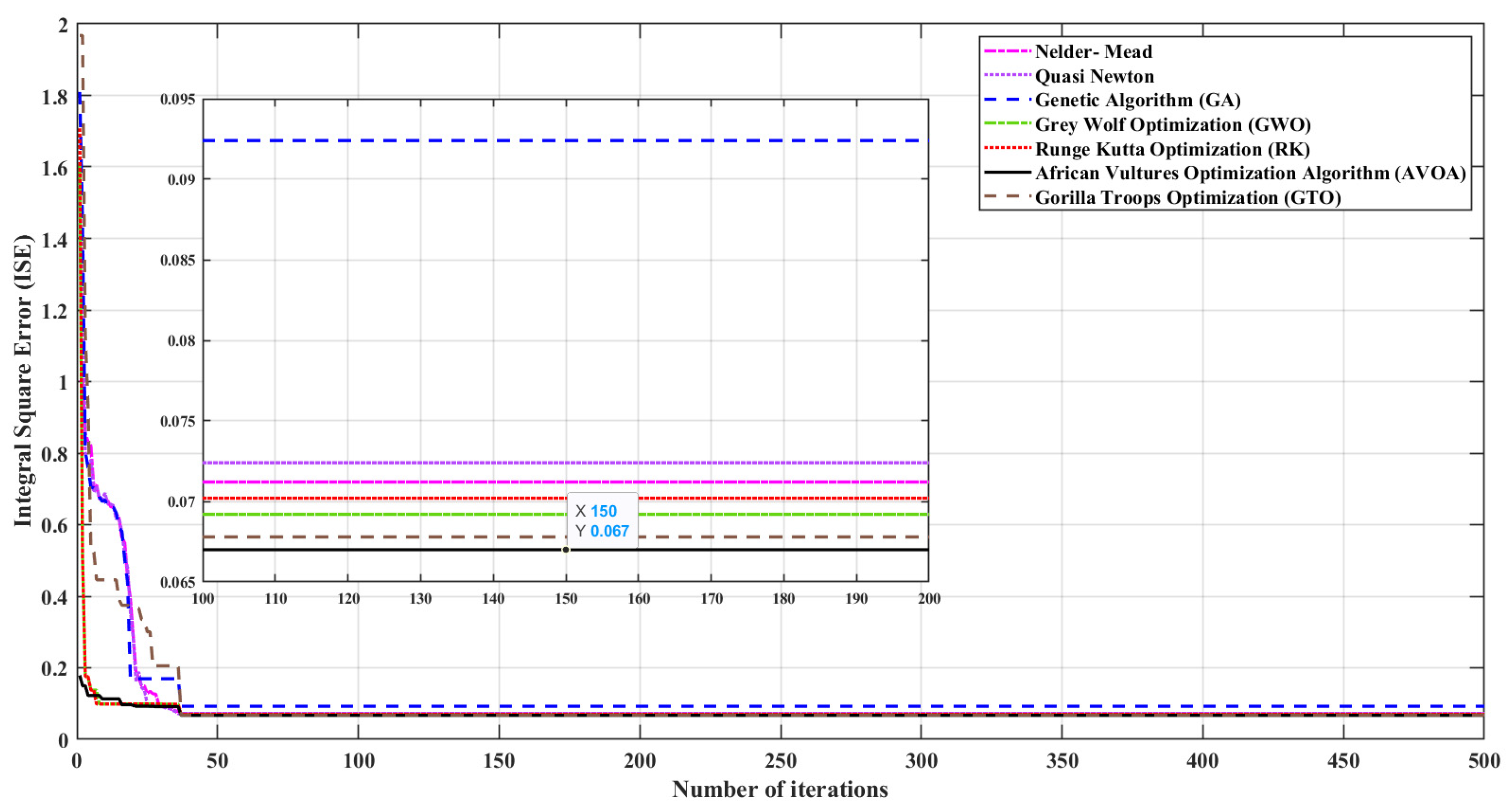
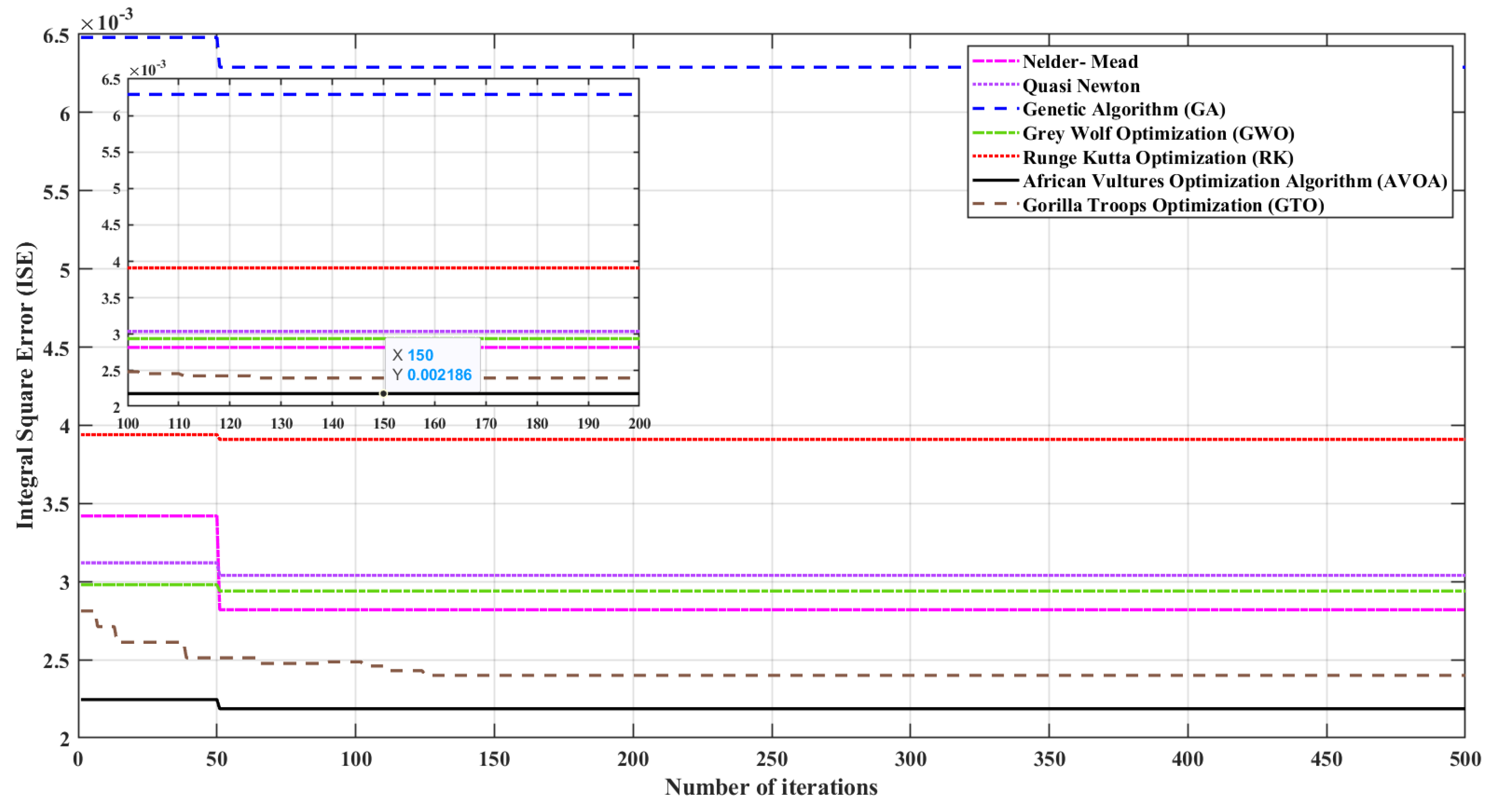
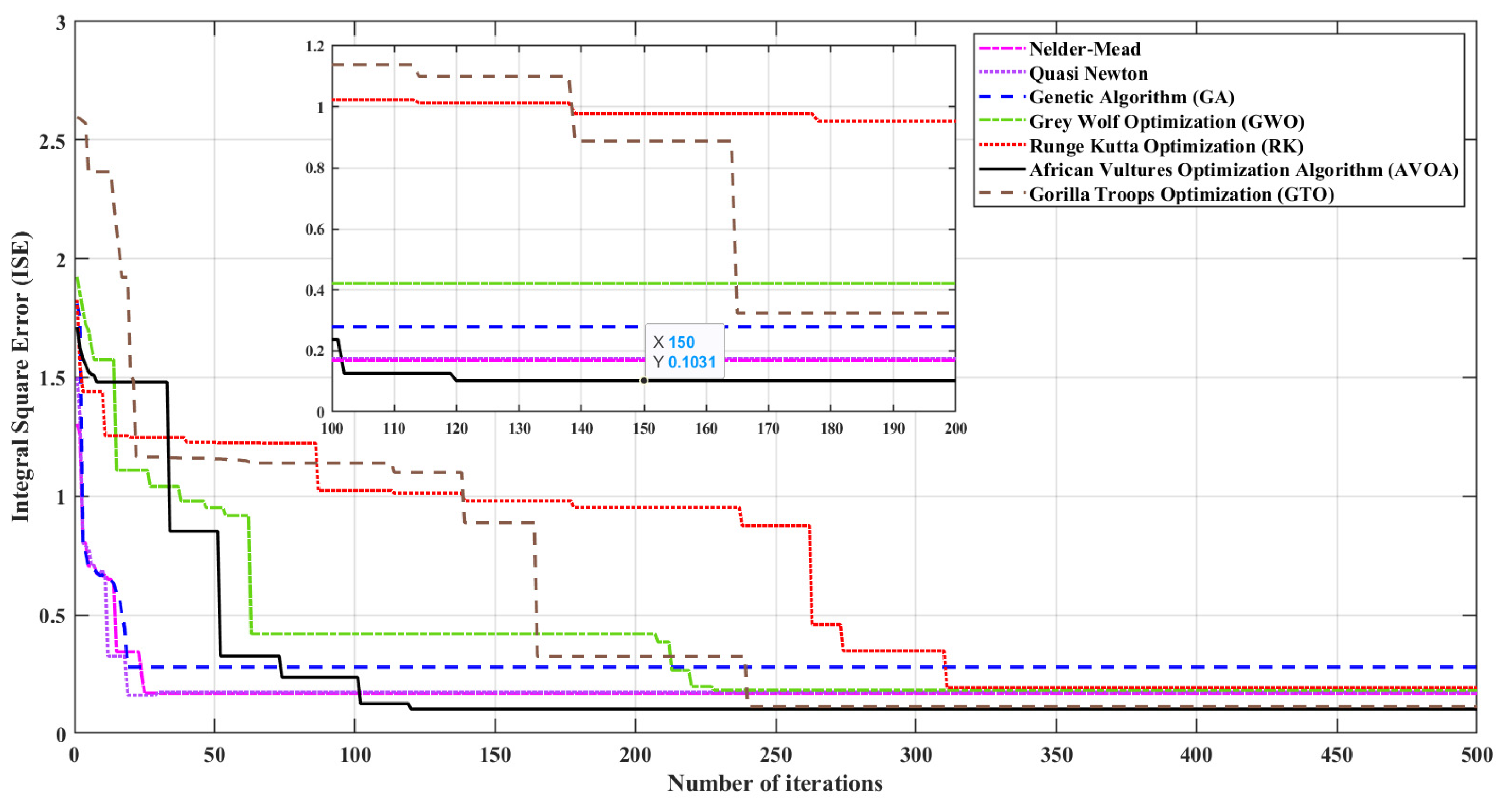
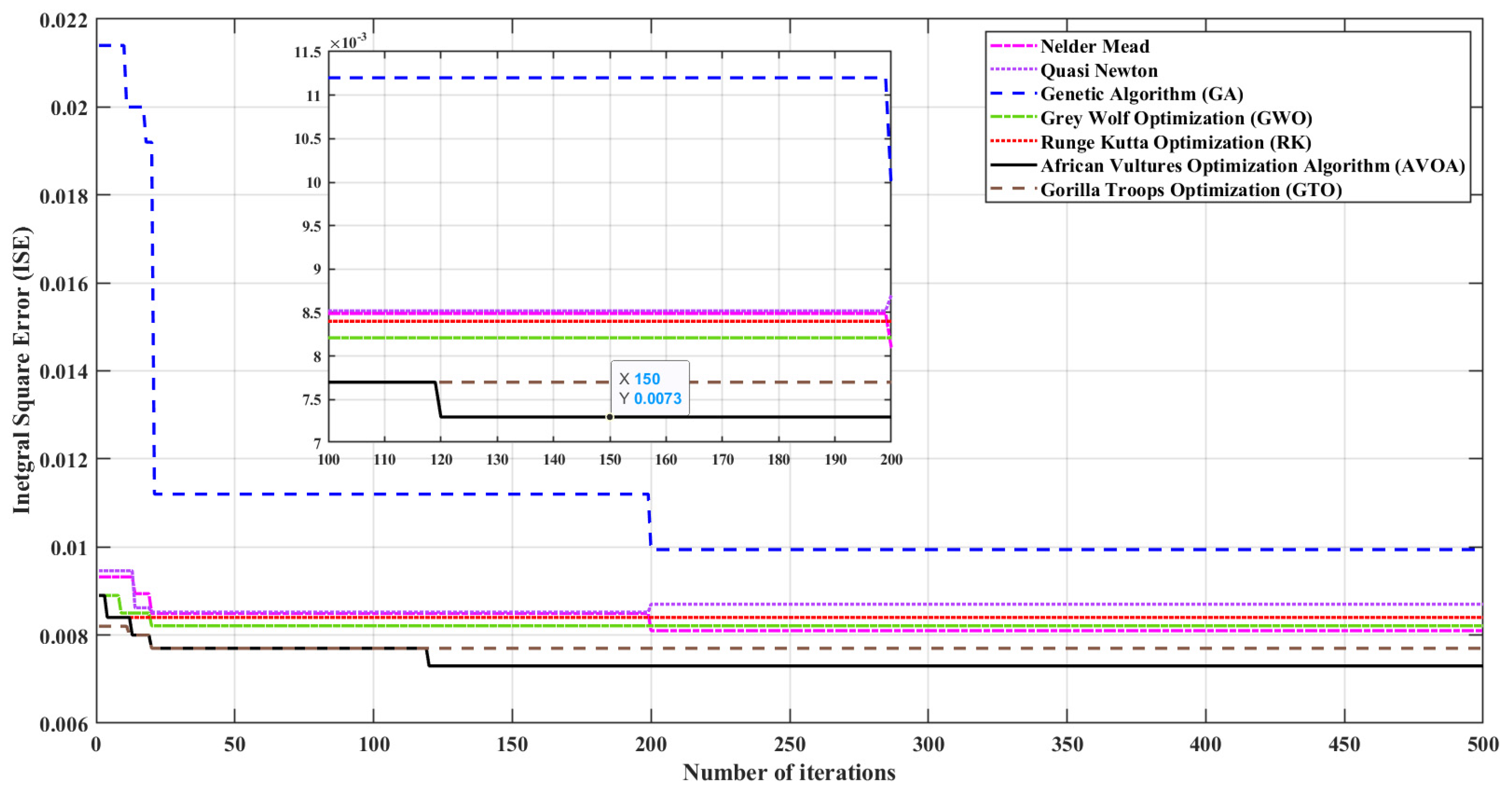
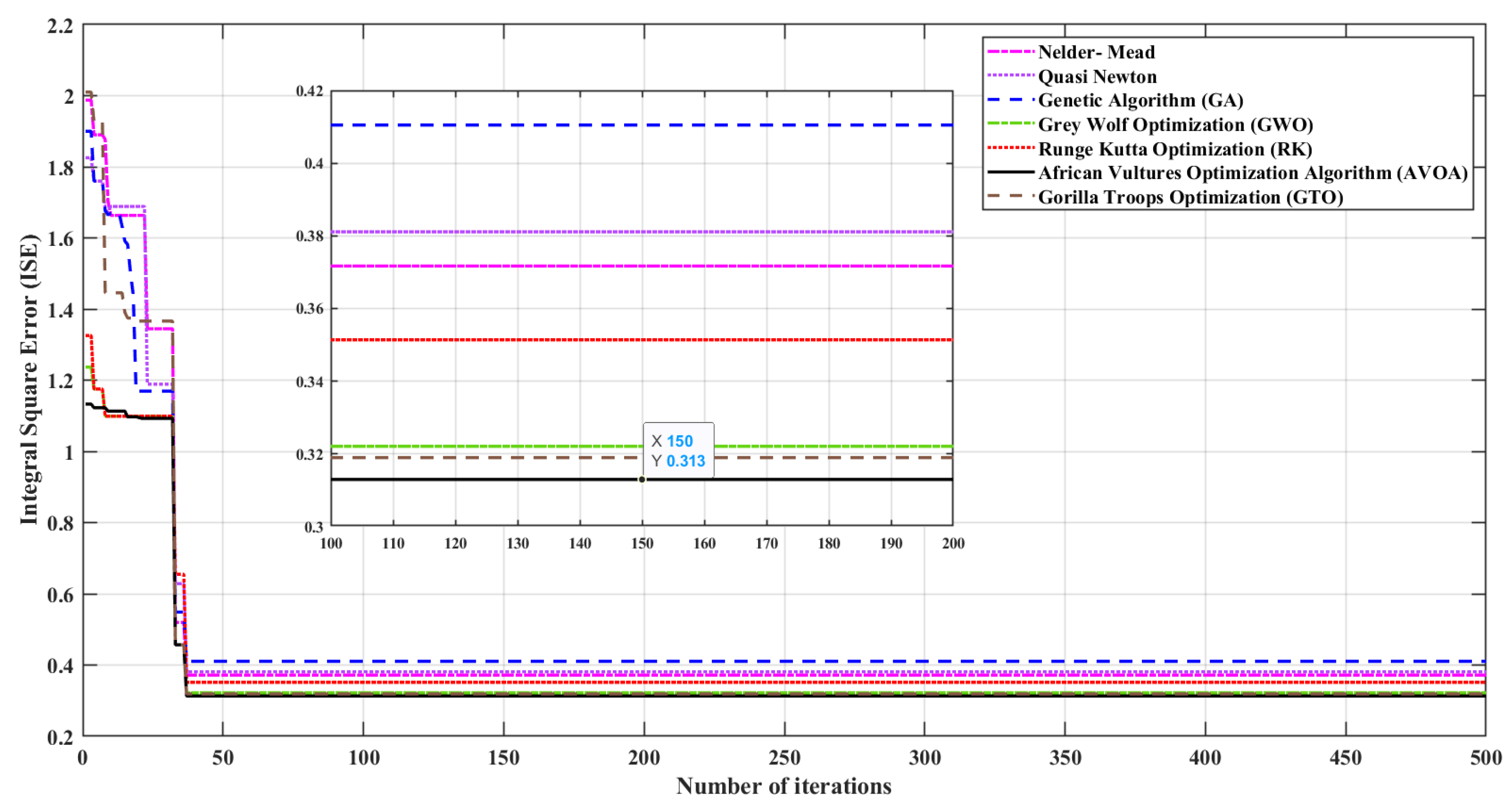
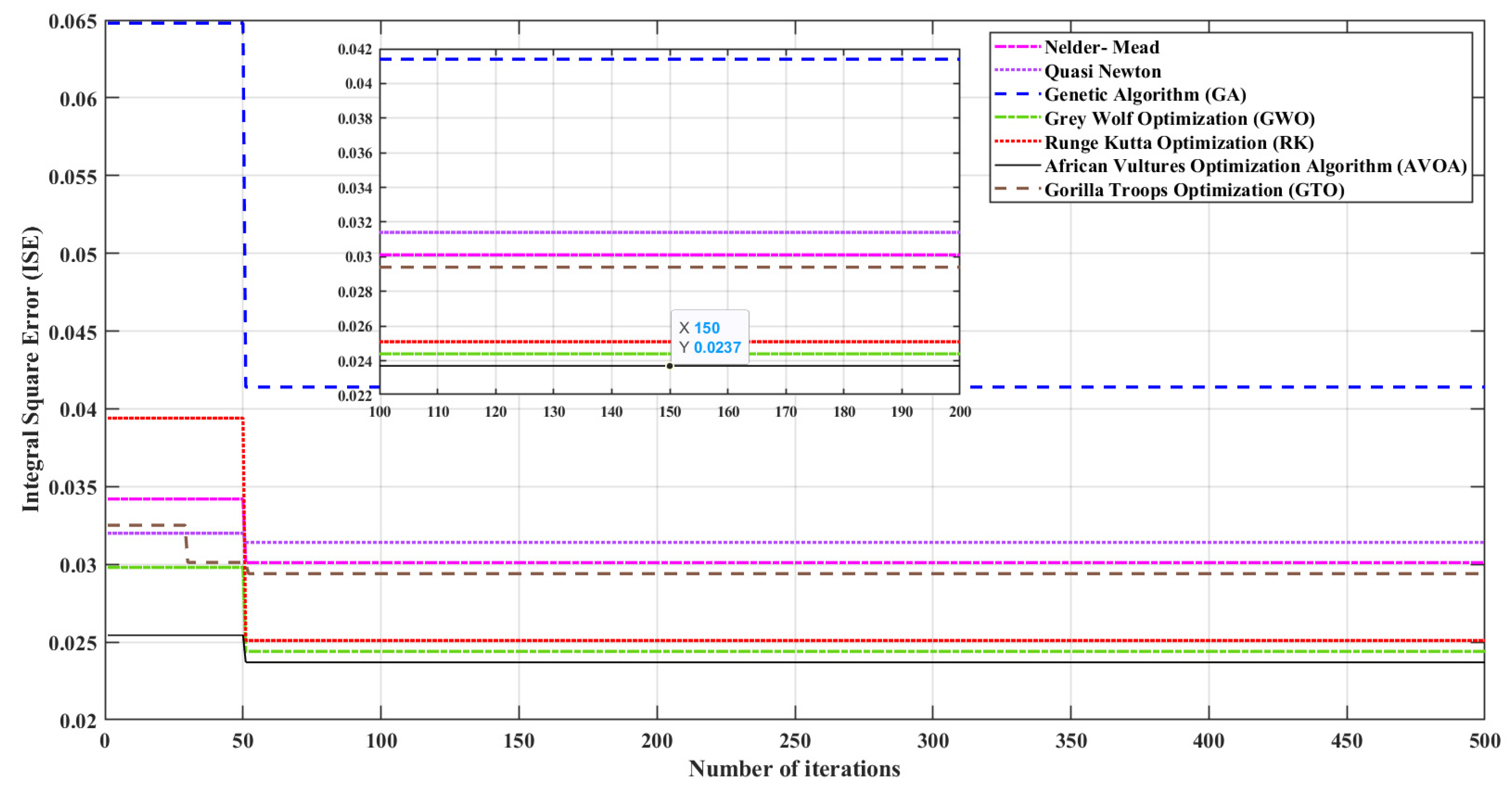
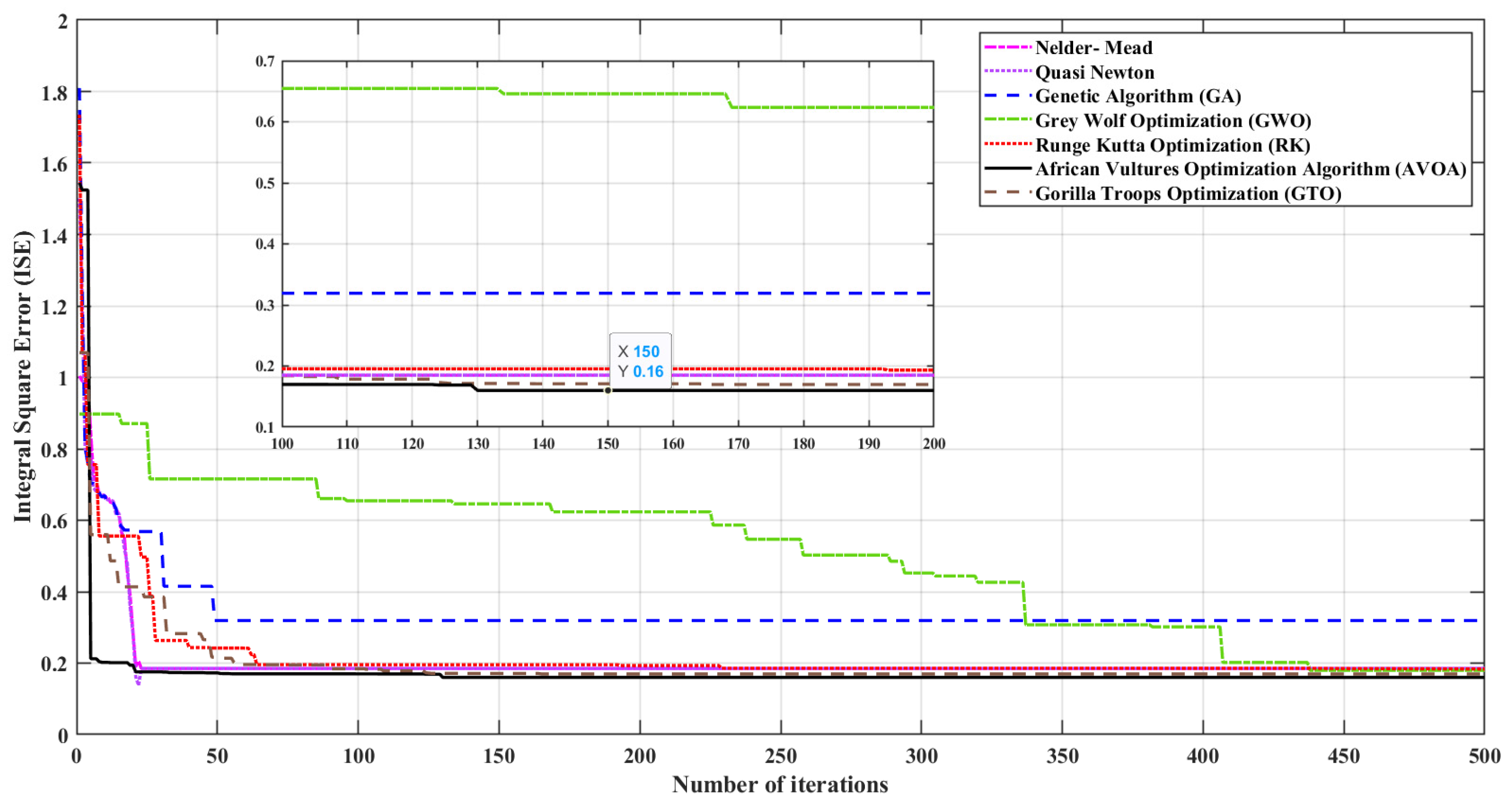
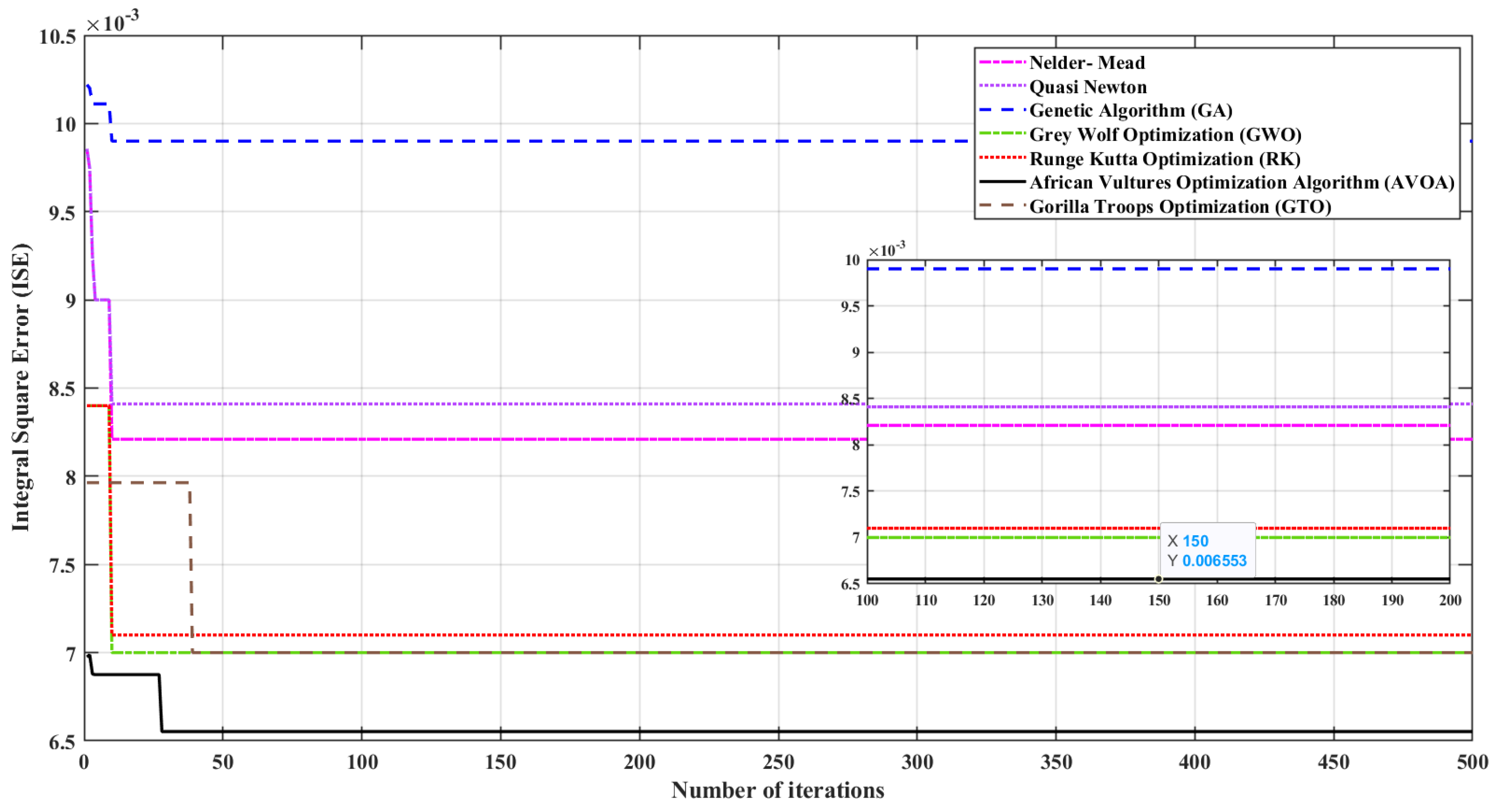
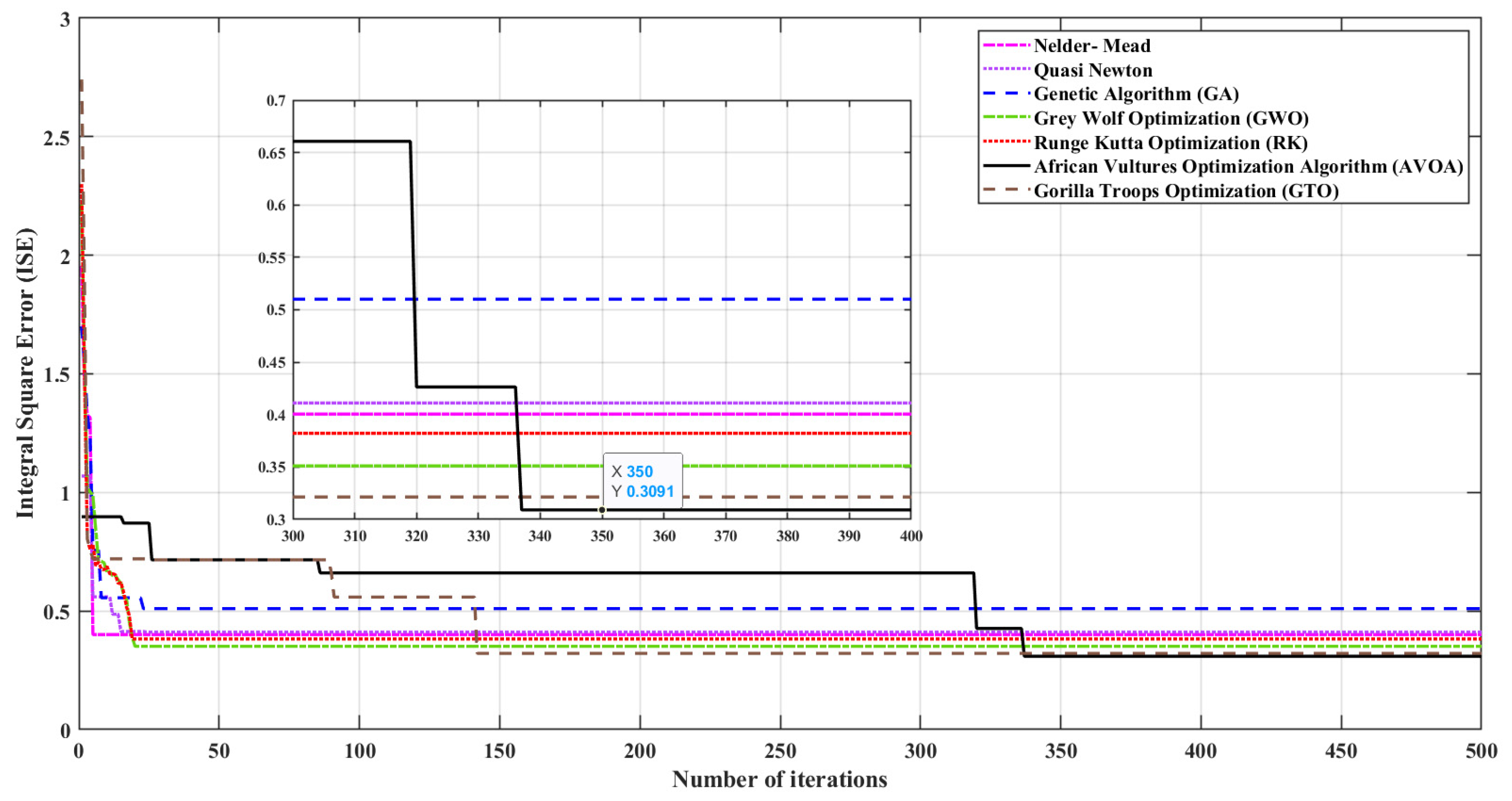
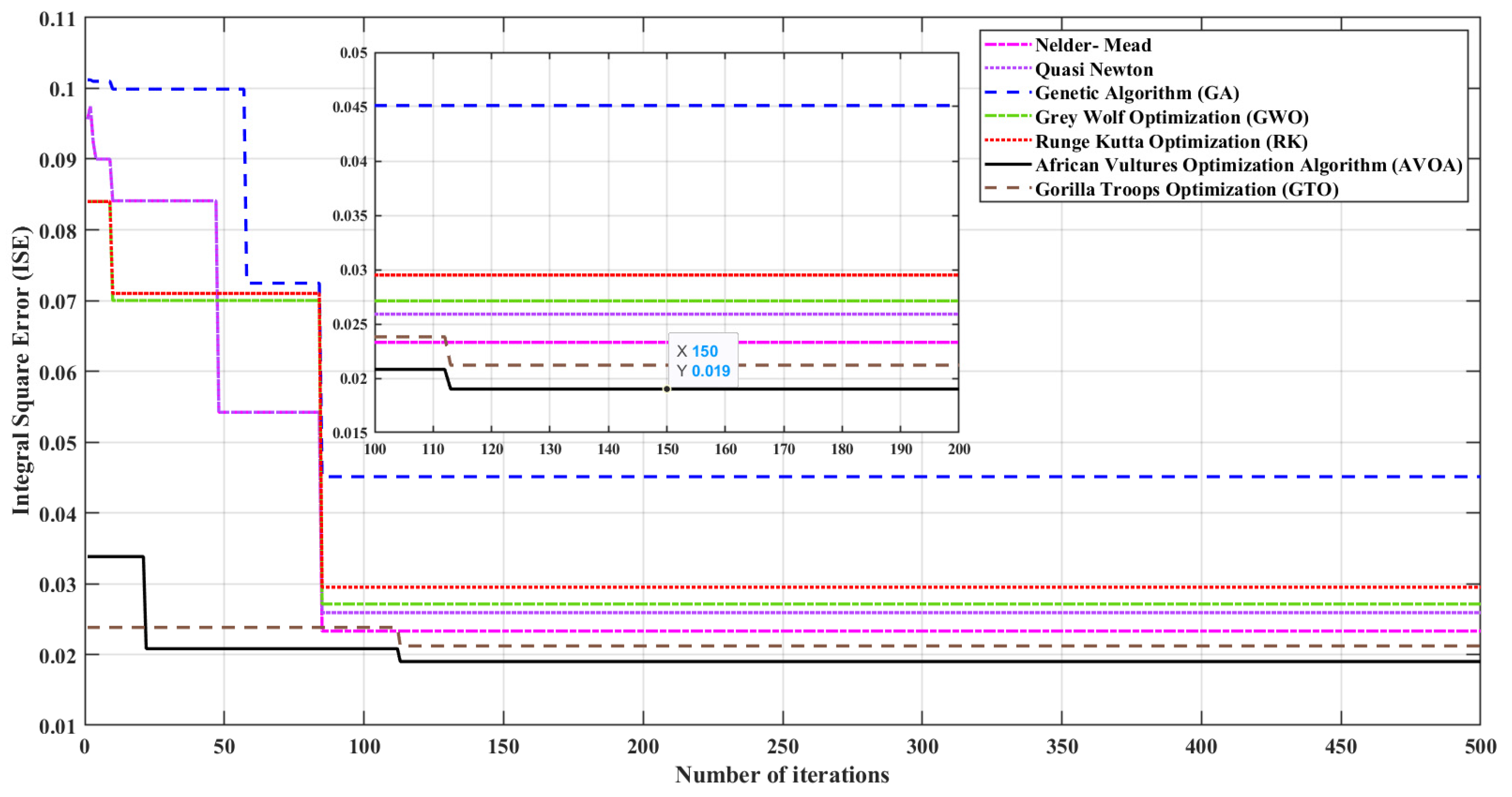
ISE is the fitness function. Numerical simulations were executed on Li-ion batteries to demonstrate the effectiveness of the suggested parameter identification technique. The proposed AVOA was compared with different algorithms such as the Nelder–Mead simplex algorithm, the quasi-Newton algorithm, the Runge Kutta optimizer, the genetic algorithm, the grey wolf optimizer, and the gorilla troops optimizer.
1.2. Literature Review
Accurate parameter estimation for
SOC estimation is a challenging problem due to lithium-ion batteries’ very nonlinear and complicated electrochemical nature [
19]. Several techniques have been used for the parameter and
SOC estimates, including the data-driven approach, non-model-based techniques, and model-based techniques [
20]. Despite the computational efficiency of these approaches, they have the drawbacks of gathering sensor errors and taking a long time to process precise parameter and
SOC estimates. Technologies based on artificial intelligence that are inspired by biology, including genetic algorithms [
21], bacterial foraging algorithms [
22], particle swarm optimization [
23], and firefly algorithms [
24], are mainly used.
Lai et al. [
25] performed a comparative analysis to identify the most effective global optimization techniques for identifying the parameters of several lithium-ion battery types. They demonstrated that exact algorithms are the best option for first-order resistance–capacitance (RC) models. At the same time, the particle swarm optimization method is the best identification approach for second-order RC models. The firefly algorithm has the maximum accuracy for third- and fourth-order RC models. The computational complexity of genetic and bacterial foraging methods is high, whereas parameter tuning for particle swarm requires a significant effort. The approaches based on computer intelligence give advantages, including noise cancellation, high accuracy, and quick convergence rate, by utilizing adaptive strategies for
SOC estimation.
Single- and double-RC-branch circuit models are widely used in model-based methods to simulate the lithium-ion battery [
26]. The battery model’s parameters are determined either offline or online. When determined offline [
27,
28], a hybrid pulse power characteristic approach is utilized to calculate the battery model parameters, which are then used to estimate the parameters. Using the fixed experiments as a reference, these parameters are calculated. However, in real time, these factors alter due to aging, temperature, dynamic working circumstances, etc., which directly impacts
SOC estimates [
29,
30]. Consequently, for proper
SOC estimation, these parameters should be evaluated online. Data-driven strategies have been presented to address the shortcomings of the two prior approaches [
31]. Through artificial intelligence techniques [
32], neural networks [
33], machine learning [
34], support vector machines [
35], and fuzzy logic [
36], this method determines the most exact correlation between the battery’s state of charge and its measurable data, such as current, voltage, and temperature [
37]. Because of their excellent learning capacity, these approaches could comprehend the battery’s internal dynamics via several charging and discharging cycles. The emergence of the latest deep-learning algorithms has led to a gradual improvement in learning accuracy thanks to the accumulation of previously learned data that enable precise
SOC estimates [
38]. These methods do, however, have significant drawbacks. They first require a large amount of data to train and evaluate the model [
39]. The complicated topology of such a neural network makes it challenging to adjust the deep-learning parameters [
40]. These methods also use up a large amount of memory space and take longer to calculate. There are more parameters and
SOC estimating techniques in the literature. The internal electrochemical reactions of the battery have frequently used electrochemical impedance spectroscopy [
41]. The internal resistance technique uses rapid voltage and current readings to measure the battery’s capacity. It is used to evaluate the battery’s state of charge [
42]. A detailed battery model is required for model-based
SOC estimation. This model can improve the simulation efficiency in addition to the
SOC estimation [
43]. The literature might separate equivalent circuit and electrochemical models [
44]. Due to its simplicity, the first category is frequently used for state-of-charge estimation and electric vehicle simulation.
Nonetheless, the number of RC branches employed determines how accurate this model is; however, the model becomes increasingly difficult for users when the number of RC branches is increased to attain accuracy, affecting parameter identification and
SOC estimation [
45]. Parameter identification interests many academics due to its significance for various model-based
SOC estimations [
46,
47], such as the neural network, genetic algorithm [
48], optimization algorithm, and least square identification [
49]. Optimization algorithms are better suited for parameter identification than neural network algorithms due to their simplicity and ease of setting. The study that goes along with it illustrates the significant efforts made to accurately and methodically assess the features of energy storage devices powered by Li-ion batteries. Although these methods have produced acceptable results, they lack precision and consistency. This paper suggests the involvement of loading and fading in identifying lithium-ion battery parameters by minimizing the error between the measured and experimental voltage using the integral square error method
. Identifying the battery model parameters ensures the best battery performance and a long lifetime. The design parameters are identified using old and new optimization techniques under different loading, fading, and temperature conditions. The design parameters identified are the open-circuit voltages under different
SOC, internal resistance, and polarization branches, which were identified by establishing the African vultures optimization algorithm (AVOA) [
50,
51], a metaheuristic algorithm with natural inspiration. The African vultures optimizer simulates the foraging and navigational habits of African vultures. According to experimental findings, the AVOA performs better than any other algorithm on 30 of 36 benchmark functions and most engineering case studies. The AVOA was created to validate the integrated square error (
ISE) of the objective function of the dynamic lithium-ion battery model. These specific skills provide the AVOA with an exceptional ability to find the best solutions. Despite its advantages, it has not yet been applied to engineering optimization problems.
1.3. Main Contributions
The following are this paper’s main contributions:
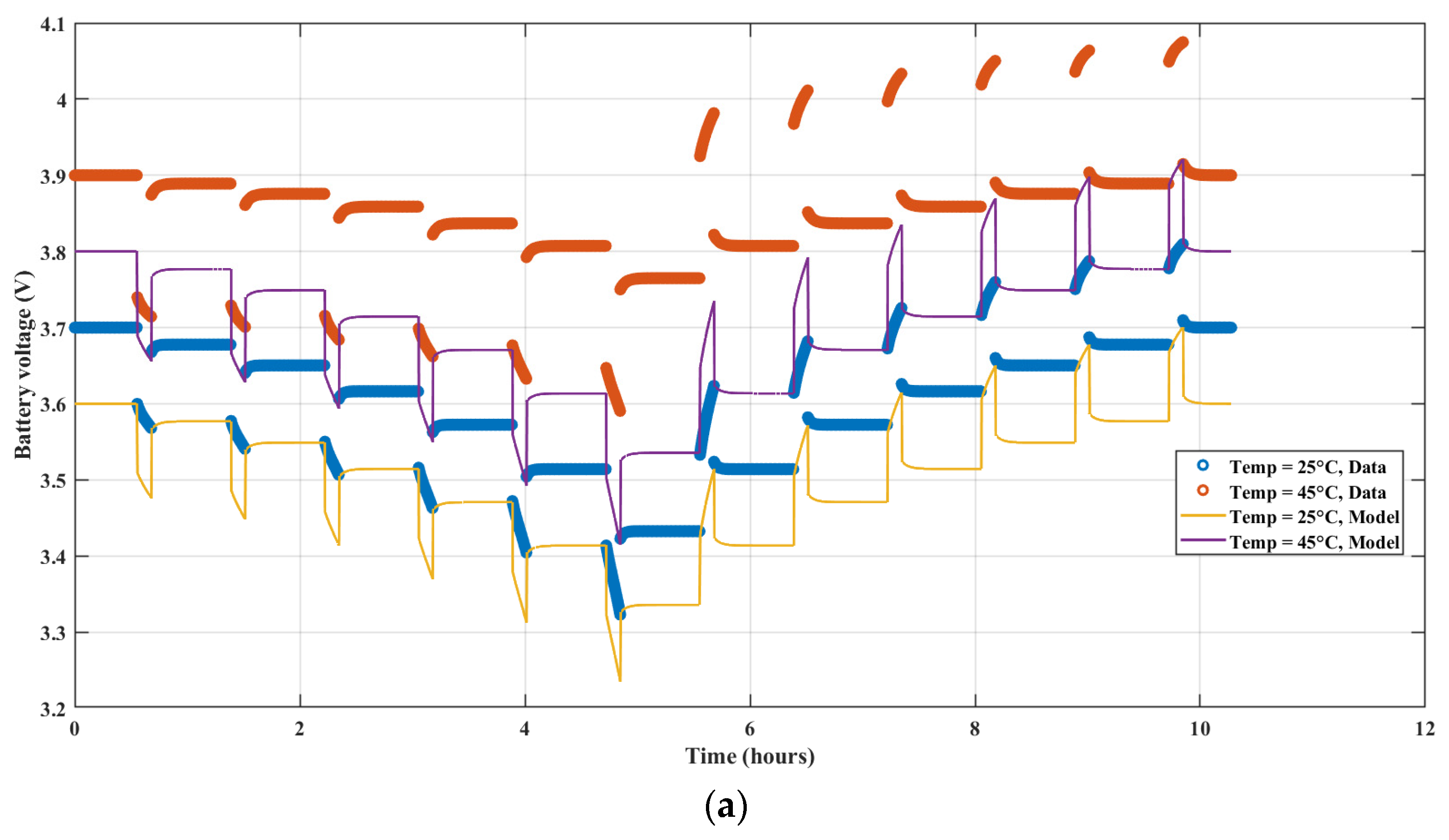
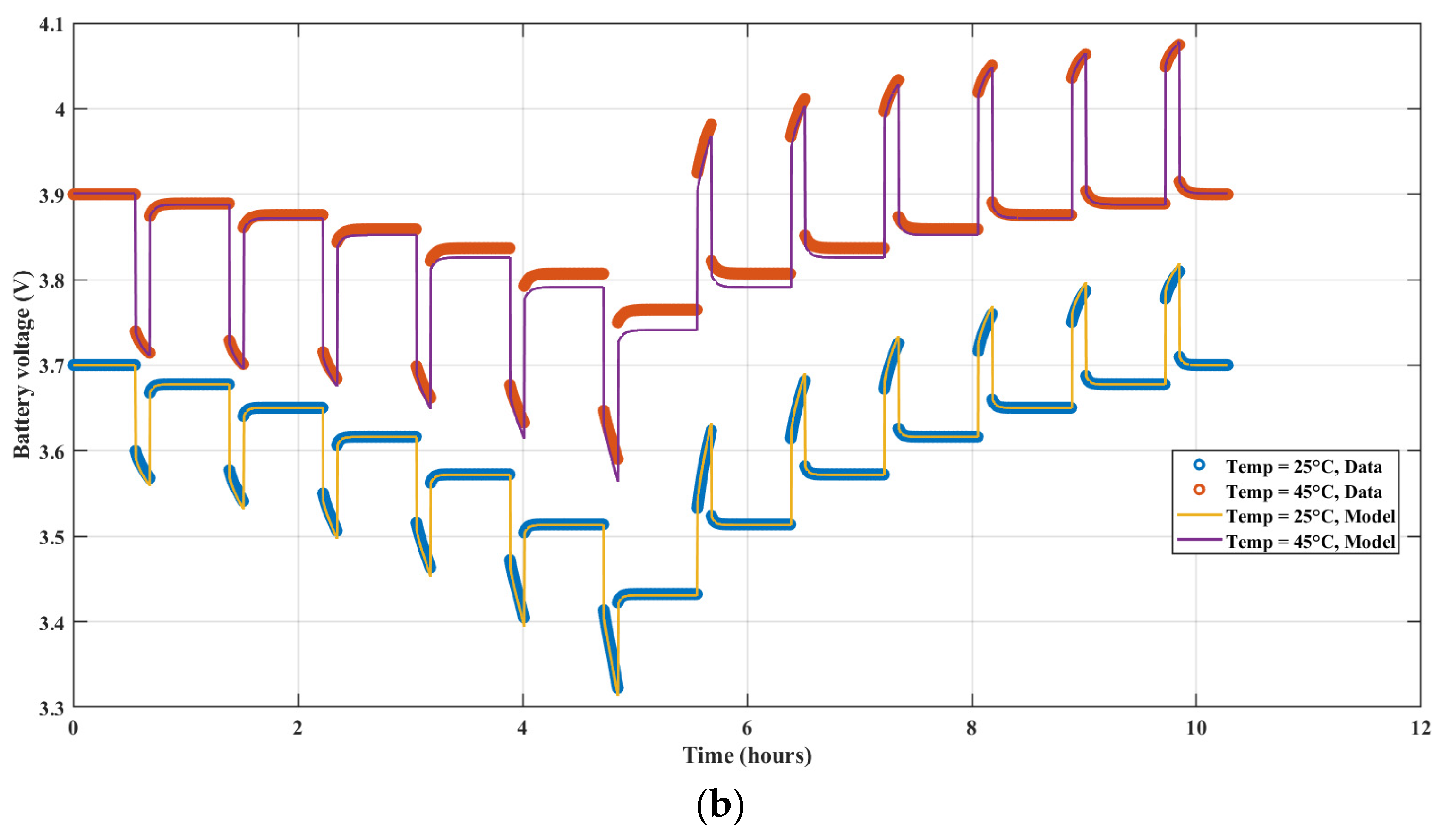
This study considers different loading, fading, and temperature conditions.
This study uses the AVOA to uncover the Li-ion battery model’s unknown parameters.
A robust nonlinear link shows the relationship between the open-circuit voltage and the SOC by evaluating the first-order resistive–capacitive version of the Li-ion battery dynamic model.
Investigations using simulations and Li-ion battery experiments are coupled.
The AVOA findings are compared with several algorithms, such as the Nelder–Mead simplex algorithm [
52], the quasi-Newton method [
53], and the Runge Kutta optimizer (RK) [
54], and metaheuristic algorithms such as the genetic algorithm (GA) [
55], the grey wolf optimizer (GWO) [
56], and the gorilla troops optimizer (GTO) [
57].
This study covers the gap of not including loading, battery aging, and temperature conditions in previous research.
1.4. Paper Organization
The remainder of this paper is presented as follows:
Section 2 describes a dynamic representation of the Li-ion battery issue using optimization.
Section 3 introduces the AVOA methodology.
Section 4 reveals the results of the AVOA’s simulation when used to address the problem with Li-ion batteries.
Section 5 explains the study’s key conclusions.
3. African Vultures Optimizer Methodology
Abdollahzadeh et al. introduced the AVOA metaheuristic algorithm in 2021, and it has since been used in numerous real-world engineering projects [
60]. By replicating and modeling the feeding activity and dwelling habits of African vultures, AVOA was first proposed. African vultures’ daily routines and foraging behavior are replicated in AVOA.
The population of African vultures consists of
vultures, and the algorithm user determines the size of
based on the current circumstances. Each vulture’s position space has
dimensions, with the size of
varying according to the dimension of the problem being handled. It is crucial to decide on a maximum number of iterations
T in advance proportional to the complexity of the issue that needs to be solved and represents the most activities the vulture can perform. As a result, each vulture’s position
at various iterations
can be written as Equation (14):
where
is the vulture’s position,
t is the number of iterations, and
D is the dimension of each vulture’s position. Vultures in the population can be split into three types based on their lifestyles in Africa. The first flock is tasked with identifying the best viable solution among all vultures if the fitness value of the feasible solution is being utilized to gauge the quality position of the vultures. According to the second flock, the practical solution is the second-best vulture overall. The remaining vultures are grouped into a third flock in addition to the first two flocks mentioned, and they all forage together throughout the population. As a result, different vulture species have different functions within the population. If it is thought that the population’s fitness value can depict the benefits and drawbacks of vultures; the worst vultures are the ones that are the most vulnerable and voracious. The best vulture at this time, though, is the one that is strongest and most prevalent. All vultures in AVOA attempt to approach the superior vulture and avoid the poor vultures. To mimic various vulture actions during the foraging phase, AVOA can be separated into five stages according to the four rules of behavior.
Stage 1: Population Grouping: The second rule states that the vultures must be categorized according to their quality after startup or before beginning the subsequent action. The vulture representing the ideal solution is put in the first flock, while the vulture representing the runner-up is put in the second flock. The third flock has the remaining vultures. Due to the directing effects of the best and second-best vultures, Equation (15) aims to choose the vulture the current iteration should advance towards and move towards the best solutions for the first and second groups. In each fitness iteration, the entire population is recalculated.
where
means the best vulture, and
is the second-best vulture. In Equation (15), the likelihood of picking the chosen vultures to steer the other vultures towards one of the best options in each group is computed, in which
L1 and
L2 are variables that must be measured before the search procedure. The probability of choosing the best solution is gained using the roulette wheel to choose each of the best solutions for each group (
).
is obtained using a random strategy, and its calculation formula is stated in Equation (16).
and
are two random values in the range [0, 1], and their sum is 1.
where
m is the overall number of the first-flock and second-flock vultures, and the
is the fitness rating of the first-flock and second-flock vultures. The first flock of vultures is symbolized by
, the second flock by
, and the third flock by
. The target vulture is then located using pertinent parameters.
Stage 2: The Vultures’ Hunger: The vulture can go further in search of food if it is not overly hungry. On the other hand, if the vulture is currently very hungry, it lacks the physical stamina to facilitate its regional travel. Therefore, vultures that are starving become highly hostile. Thus, they remain close to the vultures carrying food rather than going out searching for food on their own. Consequently, vultures’ exploration and exploitation stages can be built based on their behavior. Hunger levels indicate when vultures are moving from the exploration stage to the exploitation stage. Equation (17) can be used to determine the degree of hunger
of the
vulture at the
iteration and it is also used to transfer from the exploration phase to the exploitation phase, which is inspired by the hunger behavior of vultures if they are hungry or satisfied.
where
is a chance number in the range of [0, 1] and
is a chance number in the range of [−1, 1]. There is no assurance that when complex optimization issues are solved, the final population after the exploration stage contains precise estimates for the global optimum. Because of this, it results in an early convergence of the best local site.
is used to improve efficiency while addressing complex optimization issues, which raises the likelihood that one will successfully escape from local optimum locations.
is determined using Equation (18).
where
is a predetermined parameter that determines the likelihood that the vulture will carry out the exploitation stage, and
is a random number in the [−2, 2] range. A higher
value suggests that the exploration stage is more likely to be entered after the final optimization step. A lower
on the other hand, suggests that the exploitation stage is more likely to be reached after the final optimization stage. The formula’s design principle states that as the number of iterations increases,
gradually declines while the decreasing range continues to grow. Vultures start the period of exploration and look for new food in diverse places when
is greater than 1. Vultures enter the stage of exploitation to pursue better prey around their present position when |
| is lower than 1.
Stage 3: Exploration Stage: In the wild, vultures have superb vision, allowing them to locate dead animals and food quickly. Hence, when searching for food, vultures take a minute to survey their surroundings before starting a long trip to find the food. To determine the vulture’s behavior at this time, the creator of AVOA creates two exploring behaviors and employs a parameter called
. The range of this parameter,
, which is initialized with the algorithm, is [0, 1]. A random value in the range of [0, 1] that is more than or less than
is used by AVOA to define the vulture’s exploring strategy. To select any of the strategies in the
exploration phase, a random number between 0 and 1 is generated. If this number is greater than or equal to the
parameter, the first part of Equation (19) is used, but if
is smaller than the
parameter, the second part of Equation (19) is used. Therefore, Equation (19) can be used to describe the vulture’s exploratory phase.
represents the location of the
vulture at the
iteration, and the random numbers
,
, and
are uniformly distributed in the range of [0, 1].
is acquired by Equation (15), and
is acquired by Equation (7). The problem’s solution’s upper and lower limits are represented by
and
, respectively, and
is calculated by Equation (20) to show the separation between the existing vulture and its ideal state.
In Equation (20), is one of the best vultures, selected by using Equation (2) in the current iteration. Moreover, C represents the vultures moving randomly to protect their food from other vultures, where is inside the range [0, 2] and is obtained by using the formula , where rand is a random number between 0 and 1 and denotes the location of the vulture at the iteration.
Stage 4: Exploitation Stage (Medium): To avoid the imbalance between exploration and exploitation abilities caused by a too-rapid transition of the algorithm in the medium term, the vulture enters the medium-term exploitation stage when the value of is between 0.5 and 1. In the medium-term exploitation stage, , a parameter with a [0, 1] range, is still employed. This parameter decides whether the vulture engages in circular flight or feeding competition. As a result, before the vulture’s act, a random number in the range [0, 1] is created at the beginning of the medium-term exploitation stage. The vultures compete for food when is larger than or equal to parameter . In contrast, the rotational flying behavior is used when is less than parameter .
- (1)
Food Competition
The vulture becomes full and active when the value of
is between 0.5 and 1. As a result, when vultures congregate, weak vultures seek to group up and attack the strong vultures to gain food since they are unwilling to share their meal. The weaker vultures try to tire and obtain food from the healthy vultures by gathering around healthy vultures and causing small conflicts, calculated in Equation (21) to model this step.
where
is calculated by Equation (20),
is calculated by Equation (7), and
is an evenly distributed random number in the range of [0, 1];
is calculated by Equation (22).
- (2)
Rotating Flight
In addition to engaging in food rivalry, stuffed and energized vultures also hover above. AVOA uses a spiral model to simulate this behavior. As a result, Equation (23) can represent the vultures’ location update formula in their circular flight behavior.
The spiral model is used to model rotational flight mathematically. A spiral equation is created between all vultures and one of the two best vultures in this method. The rotational flight is expressed using Equations (24) and (25), in which
and
are calculated.
In Equations (24) and (25), represents the position vector of one of the best vultures in the current iteration, which is obtained by using Equation (2); and are evenly distributed random numbers in the range of [0, 1], and after obtaining and , the location of the vulture is updated.
Stage 5: Exploitation Stage: Nearly all vultures in the population are satisfied while the value of is less than 0.5, but the best two vulture types grow weak and hungry after prolonged exercise. During this time, vultures attack food and congregate around one food source. As a result, there is also a parameter inside the range [0, 1] at the subsequent exploitation stage. With this characteristic, researchers can tell if vultures engage in attack or aggregation behavior. Therefore, before the vulture acts during the latter exploitation stage, a random value in the range of [0, 1] is generated at random. The vultures display aggregation behavior when is higher than or equal to parameter . In contrast, the vulture engages in attack behavior when is less than parameter .
- (1)
Aggregation Behavior
When AVOA is in its advanced stages, vultures have already digested many items. If there is food, vultures congregate in large numbers, and aggressive behavior develops. The equation for updating the vultures’ location may now be expressed in Equation (26), where all vultures are finally aggregated.
is the vector of the vulture position in the next iteration.
and
are calculated by Equations (27) and (28), respectively.
In Equation (26), is the best vulture of the first group in the current iteration, is the best vulture of the second group in the current iteration, is the rate of satisfaction and is calculated using Equation (17), and is the current vector position of a vulture.
- (2)
Attack Behavior
When |
F| < 0.5, the head vultures become starved and weak and do not have enough energy to deal with the other vultures. On the other hand, other vultures also become aggressive in their quest for food. They move in different directions towards the head vulture, which is like how they move towards the best vulture when AVOA is nearing the end to obtain what little food is still available. To model this motion, Equation (29) is used.
In Equation (29),
represents the distance of the best vulture in each group, whereas
is determined using Equation (21), the dimension of the problem solution is represented by
, and
represents the Lévy flight, whose patterns are used to increase the effectiveness of AVOA. Its calculation formula is shown in Equation (30):
where
and
are equally distributed random numbers in the range of [0, 1], and
is a constant, which is set to 1.5. The calculation’s formula for
σ is shown in Equation (31).
In Equations (30) and (31), dim represents the problem dimensions, are random numbers between 0 and 1, and is a fixed default number of 1.5, where
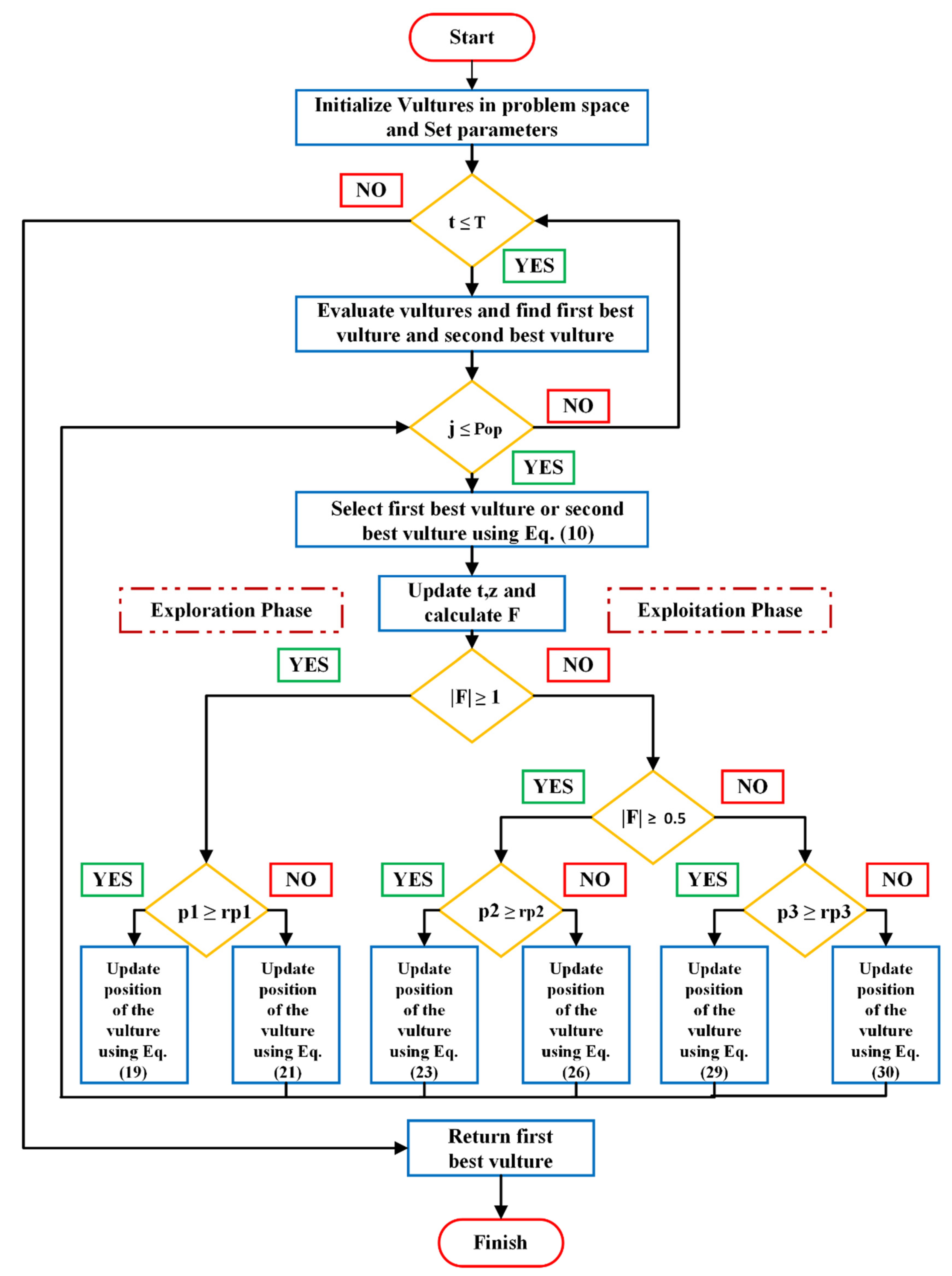
For a better understanding, the AVOA flowchart is shown in
Figure 3.

 ,
, 
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}