
Dynamic Event-Triggered Consensus Control for Markovian Switched Multi-Agent Systems: A Hybrid Neuroadaptive Method

Abstract
:1. Introduction
- The consensus control problem of switched MASs prompted by a discrete Markovian process in the network and system is addressed. Notably, existing consensus control approaches have primarily focused on MASs communicated via a fixed connected graph [10,11,12,13,14,16,20,21,22,23]. However, few consensus control techniques have been investigated for unknown nonlinear switching MASs. As a result, it is increasingly crucial to investigate the synchronous control of unknown nonlinear MASs with switching topologies and systems.
- In this paper, the consistency problem of a class of MASs with unknown nonlinearities is handled by employing a neural adaptive DET strategy. Compared with continuous-time neuroadaptive consensus control algorithms [32,33,34,36], the proposed consensus control rule not only accomplishes consensus control but also successfully reduces communication.
- A new adaptive distributed DET conditions to steer the proposed nonlinear systems to consensus is presented. The key to achieving event-triggered consensus control is designing suitable triggering circumstances. Notably, while there have been a few event-triggered consensus control methods for nonlinear MASs researched [20,21,22], current event-triggered synchronization control approaches mostly focus on linear MASs [27,28,29,30] on undirected graphs. Therefore, it is more relevant to research DET consensus control of nonlinear MASs on switched undirected networks, as opposed to the findings in [27,28,29,30].
2. Problem Formulation and Preliminaries
2.1. Markovian Switched MASs
- (1)
- the pair is controllable for all ;
- (2)
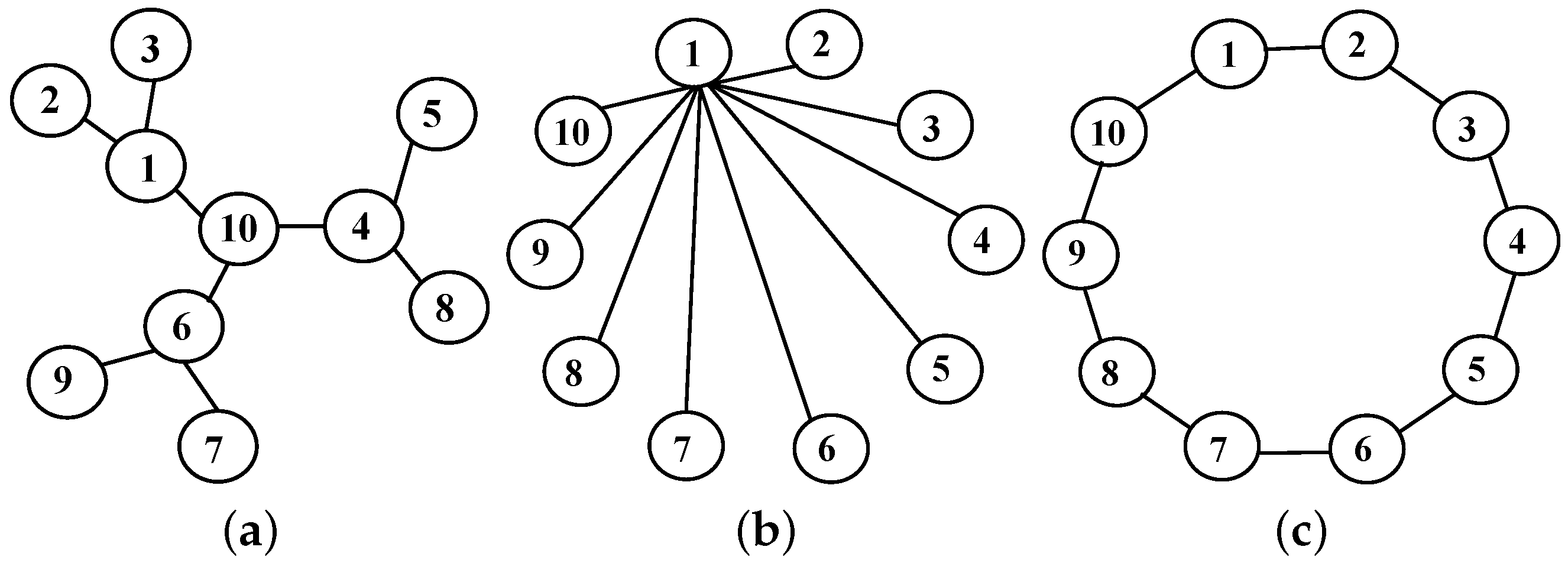
- the graph is connected for all ;
- (3)
- the discrete Markovian process is ergodic.
2.2. Preliminaries
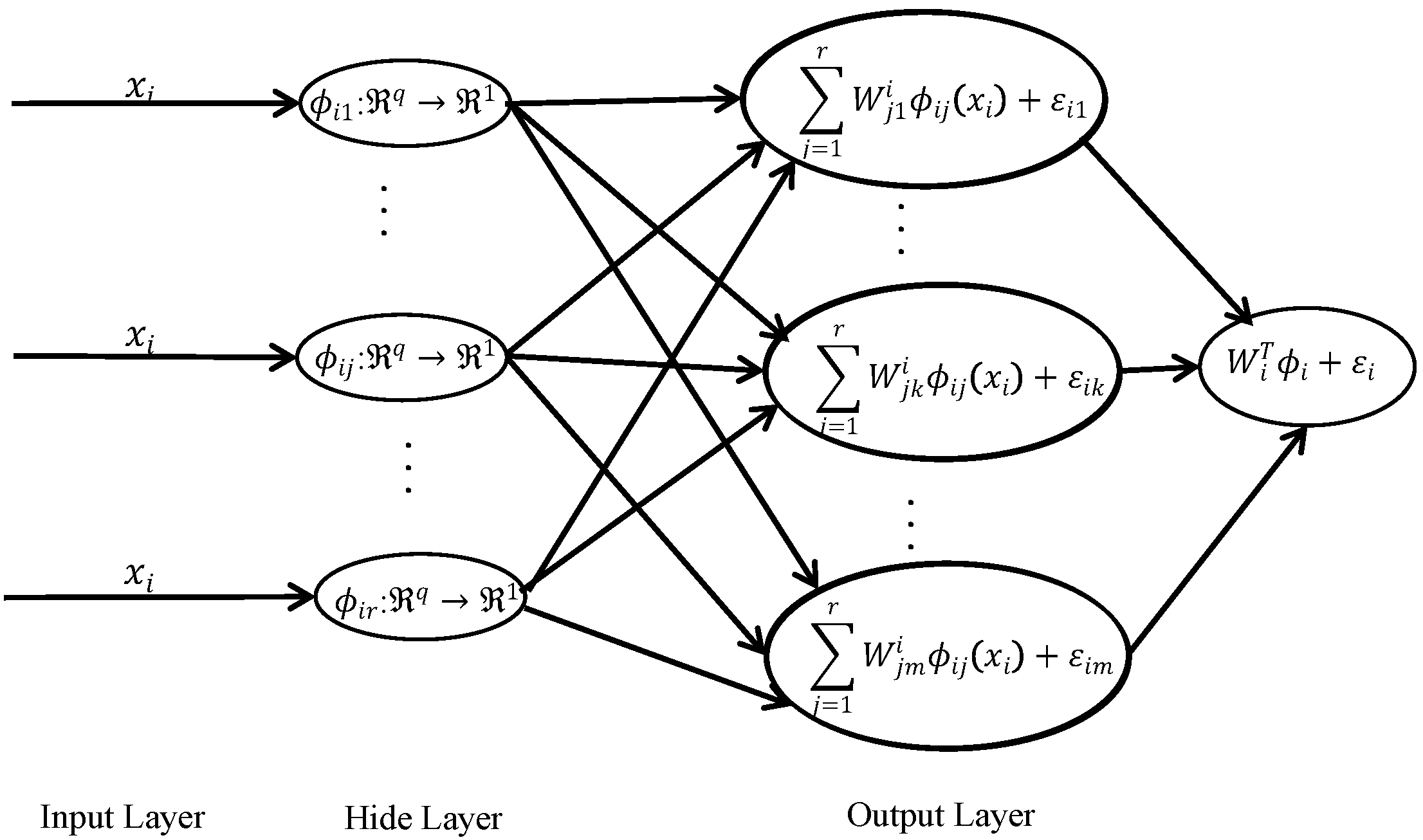
2.3. Hybrid Adaptive Control Using Neural Networks
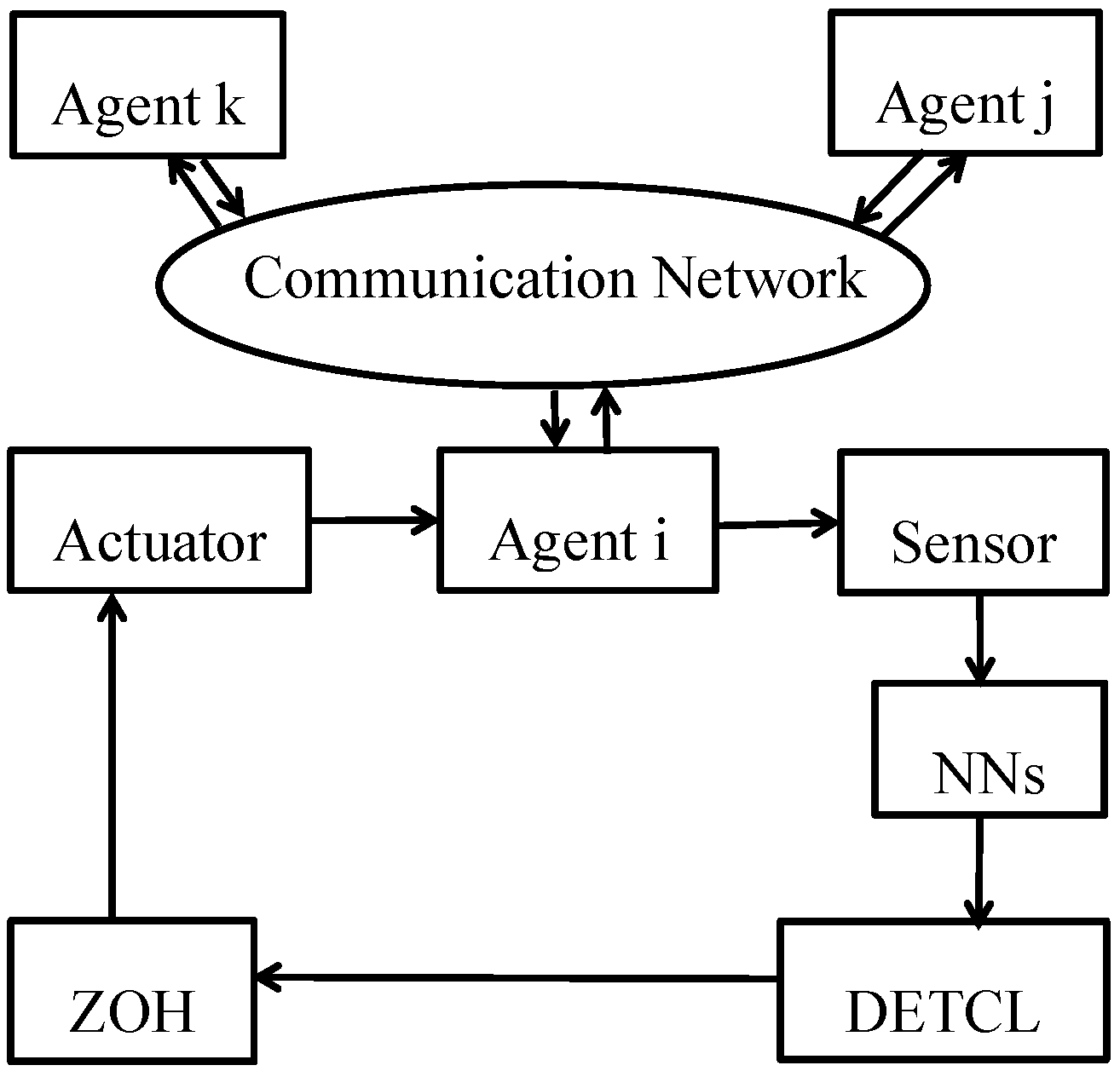
2.4. Dynamic Event-Triggered Control Protocols
3. Main Results
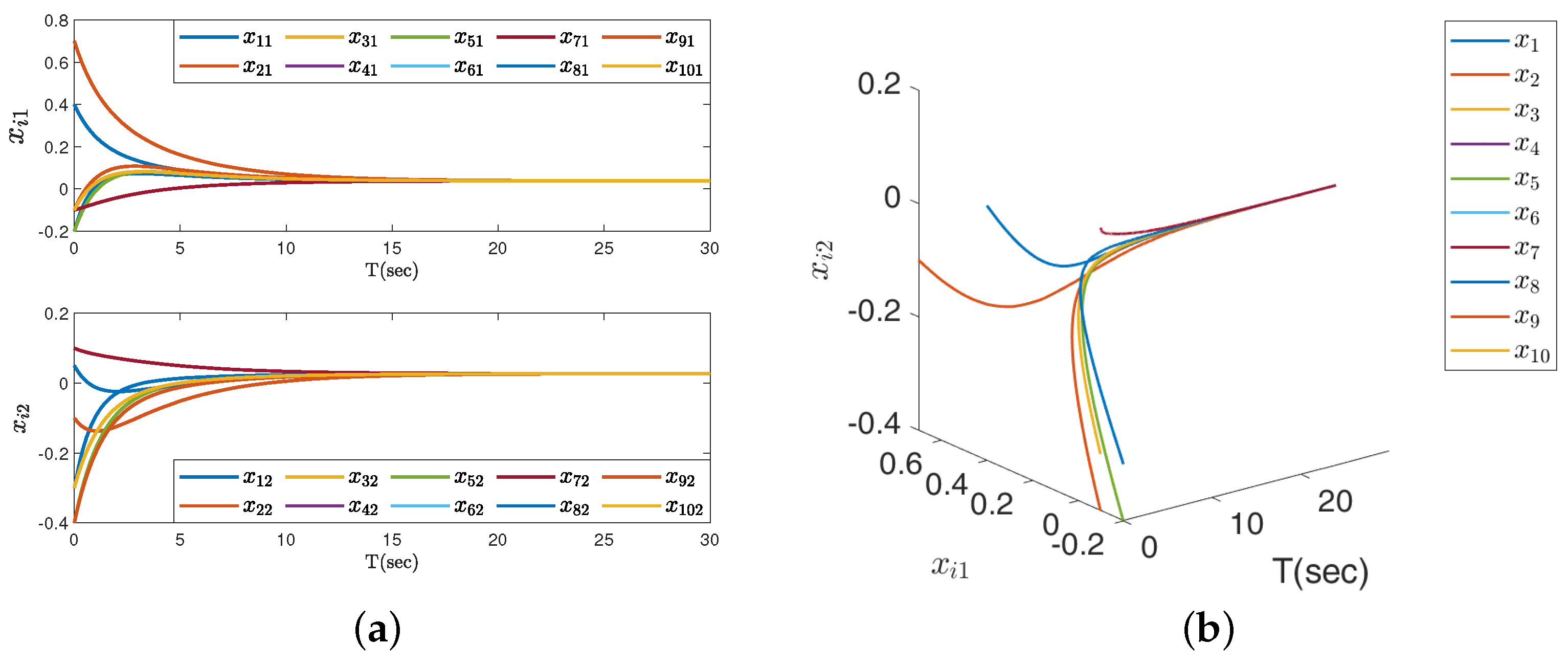
4. Illustrative Examples
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, B.; Su, H.S.; Wu, L.C.; Li, X.L.; Lu, X. Fractional-order controllability of multi-agent systems with time-delay. Neurocomputing 2021, 424, 268–277. [Google Scholar] [CrossRef]
- Amirkhani, A.; Barshooi, A.H. Consensus in multi-agent systems: A review. Artif. Intell. Rev. 2022, 55, 3897–3935. [Google Scholar] [CrossRef]
- Hu, W.K.; Huang, W.C.; Huang, Y.W.; Chen, S.B.; Wu, A.G. On reachable set estimation of multi-agent systems. Neurocomputing 2020, 401, 69–77. [Google Scholar] [CrossRef]
- Liu, B.; Shen, X.X.; Wu, L.C.; Su, H.S. Observability of heterogeneous multi-agent systems. IEEE Trans. Netw. Sci. Eng. 2021, 8, 1828–1841. [Google Scholar] [CrossRef]
- Kuznetsov, O.P. Asynchronous multi-agent multisorted systems. Autom. Remote Control 2021, 82, 294–307. [Google Scholar] [CrossRef]
- Yu, R.L.; He, P.; Li, H.; Cao, J.N.; Deng, F.Q. Consensus of multiagent systems with intermittent communication via extended state observer. IEEE Trans. Circuits Syst. II Express Briefs 2023, 70, 231–235. [Google Scholar] [CrossRef]
- Yuan, S.; Yu, C.P.; Wang, P. Suboptimal linear quadratic tracking control for multi-agent systems. Neurocomputing 2022, 487, 110–118. [Google Scholar] [CrossRef]
- Wang, Q.Y.; Liu, K.X.; Wang, X.; Wu, L.L.; Lu, J.H. Leader-following consensus of multi-agent systems under antagonistic networks. Neurocomputing 2020, 413, 339–347. [Google Scholar] [CrossRef]
- Wang, Y.; Cao, J.D.; Lu, B.; Cheng, Z.S. Global asymptotic consensus of multi-agent internet congestion control system. Neurocomputing 2021, 446, 50–64. [Google Scholar] [CrossRef]
- Zhang, J.L.; Chen, X.; Gu, G.X. State consensus for discrete-time multiagent systems over time-varying Graphs. IEEE Trans. Autom. Control 2021, 66, 346–353. [Google Scholar] [CrossRef]
- Gao, C.; Wang, Z.D.; He, X.; Han, Q.L. Consensus control of linear multiagent systems under actuator imperfection: When saturation meets fault. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 2651–2663. [Google Scholar] [CrossRef]
- Lin, C.R.; Hu, B.; Huang, W.C.; Niu, T. Robust distributed adaptive consensus for discrete-time multiagent systems with uncertain topologies. Neurocomputing 2021, 449, 100–107. [Google Scholar] [CrossRef]
- Yu, S.Z.; Yu, Z.Y.; Jiang, H.J.; Mei, X.H. Observer-based distributed consensus for multi-agent systems with directed networks and input saturation. Neurocomputing 2021, 420, 111–123. [Google Scholar] [CrossRef]
- Zou, W.C.; Qian, K.W.; Xiang, Z.R. Fixed-time consensus for a class of heterogeneous nonlinear multiagent systems. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 1279–1283. [Google Scholar] [CrossRef]
- Liu, Y.F.; Su, H.S. Second-order consensus for multiagent systems with switched dynamics and sampled position data. IEEE Trans. Syst. Man Cybern.-Syst. 2022, 52, 4129–4137. [Google Scholar] [CrossRef]
- Wang, Q.; He, W.L.; Zino, L.; Tan, D.Y.; Zhong, W.M. Bipartite consensus for a class of nonlinear multi-agent systems under switching topologies: A disturbance observer-based approach. Neurocomputing 2022, 488, 130–143. [Google Scholar] [CrossRef]
- Pu, X.C.; Ren, L.; Liu, Y.; Pu, R. Couple-group consensus for heterogeneous MASs under switched topologies in cooperative-competitive systems: A hybrid pinning and delta operator skills. Neurocomputing 2021, 441, 335–349. [Google Scholar] [CrossRef]
- Yao, D.J.; Dou, C.X.; Yue, D.; Zhao, N.; Zhang, T.J. Event-triggered adaptive consensus tracking control for nonlinear switching multi-agent systems. Neurocomputing 2020, 415, 157–164. [Google Scholar] [CrossRef]
- Din, A.; Li, Y.J. Stochastic optimal analysis for the hepatitis B epidemic model with Markovian switching. Math. Methods Appl. Sci. 2022. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, J.; Cai, Y.L.; Sun, S.X.; Sun, J.Y. Leader-following consensus for a class of nonlinear multiagent systems under event-triggered and edge-event triggered mechanisms. IEEE Trans. Cybern. 2022, 52, 7643–7654. [Google Scholar] [CrossRef]
- Li, X.W.; Sun, Z.Y.; Tang, Y.; Karimi, H.R. Adaptive event-triggered consensus of multiagent systems on directed graphs. IEEE Trans. Autom. Control 2021, 66, 1670–1685. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, Y.L.; Yu, Y.; Sun, C.Y. Fixed-time event-triggered consensus for nonlinear multiagent systems without continuous communications. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 2221–2229. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, H.G.; Cai, Y.L.; Li, W.H. Containment control of general linear multi-agent systems by event-triggered control mechanisms. Neurocomputing 2021, 433, 263–274. [Google Scholar] [CrossRef]
- Liu, Z.D.; Zhang, A.C.; Qiu, J.L.; Li, Z.X. Event-triggered control of second-order nonlinear multi-agent systems with directed topology. Neurocomputing 2021, 452, 820–826. [Google Scholar] [CrossRef]
- Li, Z.X.; Yan, J.; Yu, W.W.; Qiu, J.L. Event-triggered control for a class of nonlinear multiagent systems with directed graph. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 6986–6993. [Google Scholar] [CrossRef]
- Li, Y.F.; Liu, L.; Hua, C.C.; Feng, G. Event-triggered/self-triggered leader-following control of stochastic nonlinear multiagent systems using high-gain method. IEEE Trans. Cybern. 2021, 51, 2969–2978. [Google Scholar] [CrossRef] [PubMed]
- Xu, C.J.; Xu, H.C.; Guan, Z.H.; Ge, Y. Observer-based dynamic event-triggered semiglobal bipartite consensus of linear multi-agent systems with input saturation. IEEE Trans. Cybern. 2023, 53, 3139–3152. [Google Scholar] [CrossRef]
- Koike, R.; Endo, T.; Matsuno, F. Output-based dynamic event-triggered consensus control for linear multiagent systems. Automatica 2021, 133, 109863. [Google Scholar] [CrossRef]
- He, W.L.; Xu, B.; Han, Q.L.; Qian, F. Adaptive consensus control of linear multiagent systems with dynamic event-triggered strategies. IEEE Trans. Cybern. 2020, 50, 2996–3008. [Google Scholar] [CrossRef]
- Yi, X.L.; Liu, K.; Dimarogonas, D.V.; Johansson, K.H. Dynamic event-triggered and self-triggered control for multi-agent systems. IEEE Trans. Autom. Control 2019, 64, 3300–3307. [Google Scholar] [CrossRef]
- Qian, Y.Y.; Liu, L.; Feng, G. Distributed dynamic event-triggered control for cooperative output regulation of linear multiagent systems. IEEE Trans. Cybern. 2020, 50, 3023–3032. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.J.; Wen, G.H.; Huang, T.W.; Yu, W.W.; Lv, Y.Z. Asymptotical neuro-adaptive consensus of multi-agent systems with a high dimensional leader and directed switching topology. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Zheng, Y.K.; Li, Y.X.; Che, W.W.; Hou, Z.S. Adaptive NN-based event-triggered containment control for unknown nonlinear networked systems. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–11. [Google Scholar] [CrossRef]
- Hu, B.; Yu, X.H.; Guan, Z.H.; Kurths, J.; Chen, G.R. Hybrid neural adaptive control for practical tracking of Markovian switching networks. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 2157–2168. [Google Scholar] [CrossRef] [PubMed]
- Xiao, Y.; Che, W.W. Neural-networks-based event-triggered consensus tracking control for nonlinear MASs with DoS attacks. Neurocomputing 2022, 501, 451–462. [Google Scholar] [CrossRef]
- Shahriari-kahkeshi, M.; Afrush, A.; Pham, V.T. Adaptive consensus control of high-order uncertain nonlinear multi-agent systems with fuzzy dead-zone. Int. J. Fuzzy Syst. 2021, 23, 743–754. [Google Scholar] [CrossRef]
- Liu, Y.F.; Li, T.S.; Shan, Q.H.; Yu, R.H.; Wu, Y.; Chen, C.L.P. Online optimal consensus control of unknown linear multi-agent systems via time-based adaptive dynamic programming. Neurocomputing 2020, 404, 137–144. [Google Scholar] [CrossRef]
- Dobrushin, R.L.; Sukhov, Y.M.; Fritz, J.A.N. Kolmogorov—The founder of the theory of reversible Markov processes. Russ. Math. Surv. 1988, 43, 157. [Google Scholar] [CrossRef]
- Yue, D.D.; Cao, J.D.; Li, Q.; Liu, Q.S. Neural-network-based fully distributed adaptive consensus for a class of uncertain multiagent systems. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 2965–2977. [Google Scholar] [CrossRef]
- Gantmacher, F.R.; Brenner, J.L. Applications of the Theory of Matrices; Courier Corporation: North Chelmsford, MA, USA, 2005. [Google Scholar]
- He, W.L.; Mo, Z.K. Secure event-triggered consensus control of linear multiagent systems subject to sequential scaling attacks. IEEE Trans. Cybern. 2022, 52, 10314–10327. [Google Scholar] [CrossRef]
- Rena, Y.H.; Lia, P.T. Some results of reverses Young’s inequalities. Filomat 2022, 36, 2541–2550. [Google Scholar] [CrossRef]
- Avdeev, N.N.; Semenov, E.M.; Usachev, A.S. Banach limits: Extreme properties, invariance and the Fubini theorem. St. Petersburg Math. J. 2022, 33, 607–618. [Google Scholar] [CrossRef]
- Liu, Y.F.; Su, H.S.; Zeng, Z.G. Second-order consensus for multiagent systems with switched dynamics. IEEE Trans. Cybern. 2022, 52, 4105–4114. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, X.; Wang, J.; Feng, J.; Cai, J.; Zhao, Y. Dynamic Event-Triggered Consensus Control for Markovian Switched Multi-Agent Systems: A Hybrid Neuroadaptive Method. Mathematics 2023, 11, 2196. https://doi.org/10.3390/math11092196
Luo X, Wang J, Feng J, Cai J, Zhao Y. Dynamic Event-Triggered Consensus Control for Markovian Switched Multi-Agent Systems: A Hybrid Neuroadaptive Method. Mathematics. 2023; 11(9):2196. https://doi.org/10.3390/math11092196
Chicago/Turabian StyleLuo, Xue, Jingyi Wang, Jianwen Feng, Jiayi Cai, and Yi Zhao. 2023. "Dynamic Event-Triggered Consensus Control for Markovian Switched Multi-Agent Systems: A Hybrid Neuroadaptive Method" Mathematics 11, no. 9: 2196. https://doi.org/10.3390/math11092196