
A Novel Reconstruction of the Sparse-View CBCT Algorithm for Correcting Artifacts and Reducing Noise

Abstract
:1. Introduction
2. Reconstruction Methods
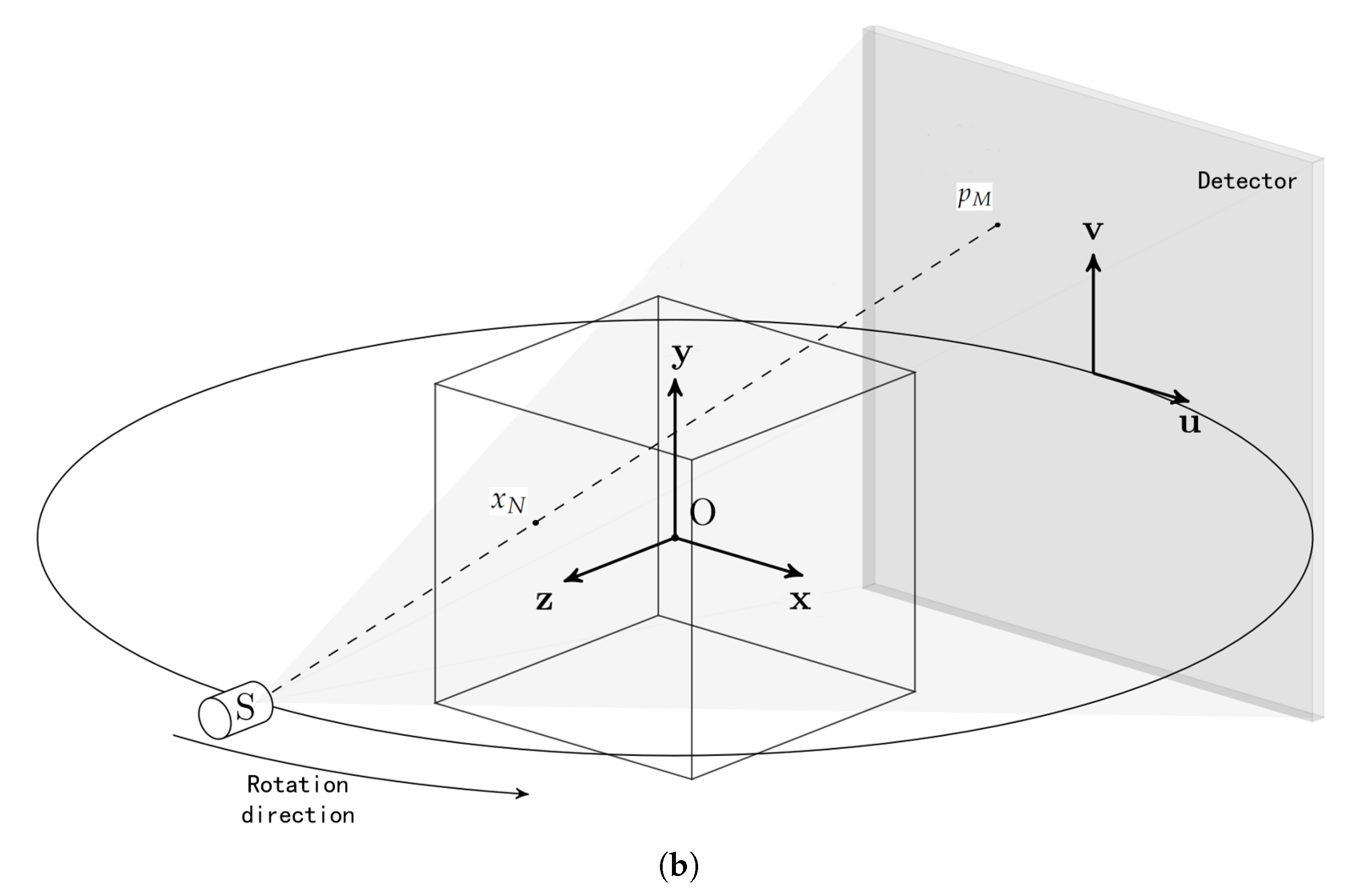
2.1. Reconstruction Model
2.2. Solution Method
2.3. Denoising Image Fusion Algorithm
- The 3D noisy voxel is divided into three groups of slices according to the direction of the Cartesian coordinate axis: .
- Each 2D pure matrix F could be denoised independent through WSNM algorithm from noisy matrix X.
- Fuse by .
2.3.1. Weighted Schatten p-Norm Minimization Algorithm
2.3.2. Fuse Denosing Image
2.4. Adaptive Steepest Descent Projection onto Convex Sets Algorithm
| Algorithm 1 CBCT sparse reconstruction based on ADS-POCS and image fusion. |
| Input: |
| System matrix , projection data ; |
| the power of Schatten p-norm C, the maximum iterative step ; |
| the constant C, the minimum value ; |
| the factors and ; |
| the iteration error ; |
| 1: Standardization of the projection data by literature [22]; |
| 2: If iter = 0, the initial reconstruction by using the FDK algorithm; |
| 3: iter = 1; |
| 4: While() |
| 5: divide x into three groups of slices ; |
| 6: For axis = x,y,z |
| 7: Singular value decomposition: ; |
| 8: Estimate weight vector by using Equation (10); |
| 9: Calculate from Equation (8); |
| 10: Calculate ; |
| 11: End |
| 12: Fuse denoised slice matrix to form ; |
| 13: calculating by using Equation (12) |
| 14: |
| 15: End |
| 16: return |
| Output: |
| Reconstruction voxels ; |
3. Results and Discussion
3.1. Experimental Setup
- X-ray parameters:
- -
- Maximum X-ray tube voltage is 70;
- -
- Focus is 0.4 mm;
- -
- kV The anode (or cathode) indirectly is 35 kV;
- -
- Minimum X-ray tube voltage is 50;
- -
- kV Maximum X-ray tube current of 12;
- -
- mA Maximum filament current is 3.0 A.
- Detector parameters:
- -
- Types of detectors is amorphous silicon;
- -
- Type of scintillator is CsI;
- -
- Effective imaging area (inch) is ;
- -
- Pixel size (m) is 139;
- -
- Spatial resolution (lp/mm) is 3.6;
- -
- AD converted bits (bit) is 16;
- -
- Dimensions (mm) is ;
- -
- Weight (kg) is 4.6;
- -
- Power dissipation (W) is Max.20.
3.2. Sparse Reconstruction of Digital Brain Phantom
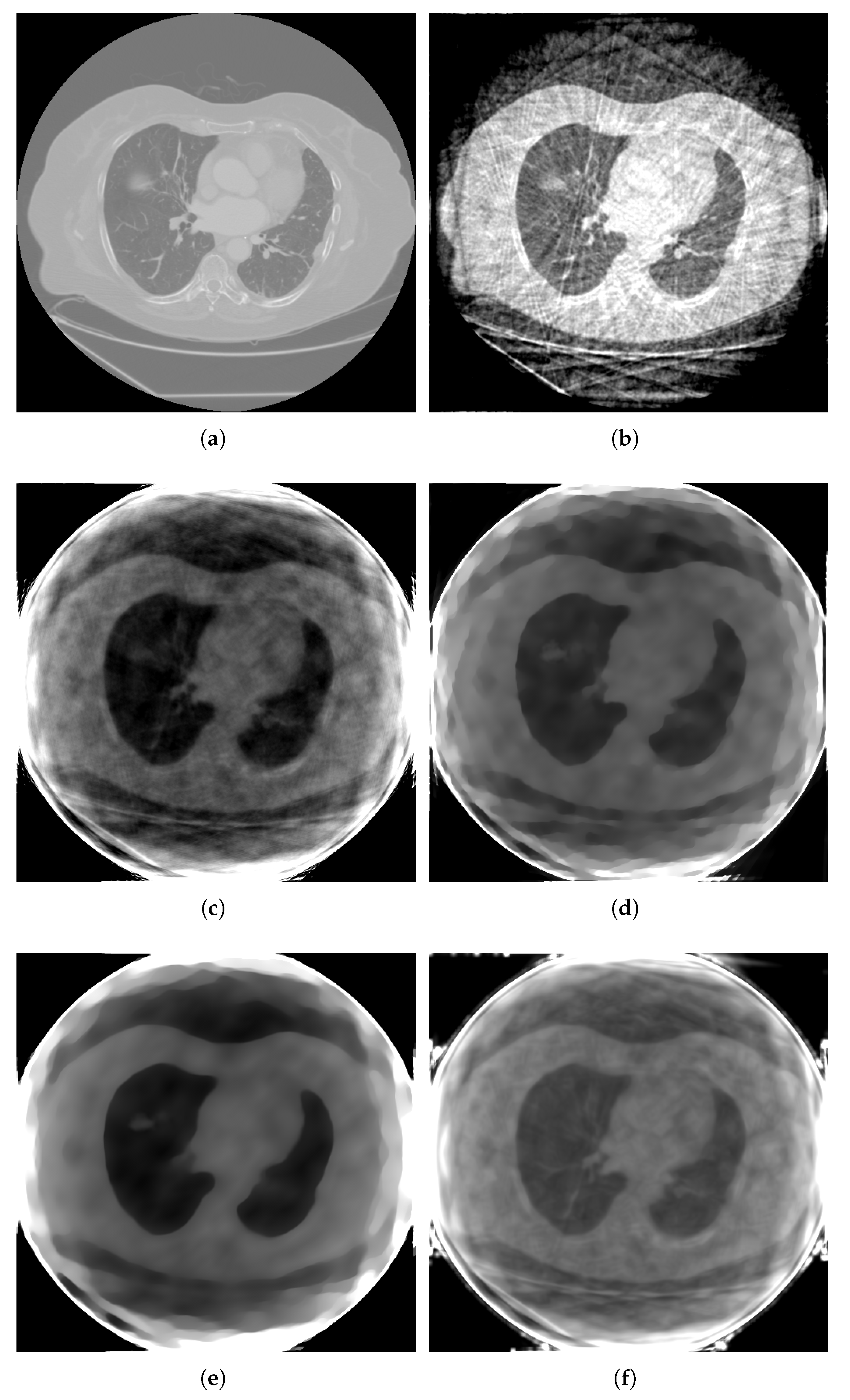
3.3. Sparse Reconstruction of Downloaded CBCT Projections
3.4. Sparse Reconstruction of Real Projections
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CT | computed tomography |
| CBCT | cone-beam computed tomograph |
| FBP | filtered back projection |
| FDK | Feldkamp–Davis–Kress |
| SART | simultaneous algebraic reconstruction |
| OS-SART | ordered-subset simultaneous algebraic reconstruction technique |
| CS | compressed sensing theory |
| TV | total variation |
| ASD-POCS | adaptive steepest descent projection onto convex-sets |
| PSNR | peak signal-to-noise ratio |
| CNN | convolutional neural network |
| BM3D | block-matching and 3D filtering |
| LRMA | low-rank matrix approximation |
| WNNM | weighted nuclear norm minimization |
| WSNM | weighted Schatten p-norm minimization |
| GST | generalized soft-thresholding |
| RMSE | root mean square error |
| SSIM | structural similarity index |
| TICA | The Cancer Imaging Archive |
| OS-ASD-POCS | ordered subset ASD-POCS |
References
- Wang, Y.; Yang, T.; Huang, W. Limited-angle computed tomography reconstruction using combined FDK-based neural network and U-Net. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; pp. 1572–1575. [Google Scholar]
- Rathore, J.S.; Laquai, R.; Biguri, A.; Soleimani, M.; Vienne, C. Benchmarking of different reconstruction algorithms for industrial cone-beam CT. In Proceedings of the 11th Conference on Industrial Computed Tomography, Wels, Austria (ICT 2022), Wels, Austria, 8–11 February 2022; pp. 1–8. [Google Scholar]
- Zhou, B.; Chen, X.; Zhou, S.K.; Duncan, J.S.; Liu, C. DuDoDR-Net: Dual-domain data consistent recurrent network for simultaneous sparse view and metal artifact reduction in computed tomography. Med. Image Anal. 2022, 75, 102289. [Google Scholar] [CrossRef] [PubMed]
- Jerri, A.J. The Shannon sampling theorem—Its various extensions and applications: A tutorial review. Proc. IEEE 1977, 65, 1565–1596. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Candes, E.J. The restricted isometry property and its implications for compressed sensing. C. R. Math. 2008, 346, 589–592. [Google Scholar] [CrossRef]
- Sidky, E.Y.; Pan, X. Image reconstruction in circular cone-beam computed tomography by constrained, total-variation minimization. Phys. Med. Biol. 2008, 53, 4777. [Google Scholar] [CrossRef] [PubMed]
- Yang, F.; Zhang, D.; Zhang, H.; Huang, K.; Du, Y.; Teng, M. Streaking artifacts suppression for cone-beam computed tomography with the residual learning in neural network. Neurocomputing 2020, 378, 65–78. [Google Scholar] [CrossRef]
- Sori, W.J.; Feng, J.; Godana, A.W.; Liu, S.; Gelmecha, D.J. DFD-Net: Lung cancer detection from denoised CT scan image using deep learning. Front. Comput. Sci. 2021, 15, 152701. [Google Scholar] [CrossRef]
- Wang, T.; Xia, W.; Huang, Y.; Sun, H.; Liu, Y.; Chen, H.; Zhou, J.; Zhang, Y. DAN-Net: Dual-domain adaptive-scaling non-local network for CT metal artifact reduction. Phys. Med. Biol. 2021, 66, 155009. [Google Scholar] [CrossRef]
- Croton, L.C.; Ruben, G.; Morgan, K.S.; Paganin, D.M.; Kitchen, M.J. Ring artifact suppression in X-ray computed tomography using a simple, pixel-wise response correction. Opt. Express 2019, 27, 14231–14245. [Google Scholar] [CrossRef]
- Mäkinen, Y.; Azzari, L.; Foi, A. Collaborative filtering of correlated noise: Exact transform-domain variance for improved shrinkage and patch matching. IEEE Trans. Image Process. 2020, 29, 8339–8354. [Google Scholar] [CrossRef] [PubMed]
- Dabov, K.; Foi, A.; Katkovnik, V.; Egiazarian, K. Image restoration by sparse 3D transform-domain collaborative filtering. In Proceedings of the Image Processing: Algorithms and Systems VI; SPIE: Bellingham, WA, USA, 2008; Volume 6812, pp. 62–73. [Google Scholar]
- Mäkinen, Y.; Marchesini, S.; Foi, A. Ring artifact and Poisson noise attenuation via volumetric multiscale nonlocal collaborative filtering of spatially correlated noise. J. Synchrotron Radiat. 2022, 29, 829–842. [Google Scholar] [CrossRef] [PubMed]
- Dong, W.; Li, Z.; Xiang, D. Prior image constrained low-rank matrix decomposition method in limited-angle reverse helical cone-beam CT. J. X-ray Sci. Technol. 2015, 23, 759–772. [Google Scholar] [CrossRef] [PubMed]
- Gu, S.; Xie, Q.; Meng, D.; Zuo, W.; Feng, X.; Zhang, L. Weighted nuclear norm minimization and its applications to low level vision. Int. J. Comput. Vis. 2017, 121, 183–208. [Google Scholar] [CrossRef]
- Xie, Y.; Gu, S.; Liu, Y.; Zuo, W.; Zhang, W.; Zhang, L. Weighted Schatten p-norm minimization for image denoising and background subtraction. IEEE Trans. Image Process 2016, 25, 4842–4857. [Google Scholar] [CrossRef]
- Xu, J.; Cheng, Y.; Ma, Y. Weighted schatten p-norm low rank error constraint for image denoising. Entropy 2021, 23, 158. [Google Scholar] [CrossRef] [PubMed]
- Zuo, W.; Meng, D.; Zhang, L.; Feng, X.; Zhang, D. A generalized iterated shrinkage algorithm for non-convex sparse coding. In Proceedings of the IEEE International Conference on Computer Vision, Sydney, Australia, 1–8 December 2013; pp. 217–224. [Google Scholar]
- Xu, C.; Yang, B.; Guo, F.; Zheng, W.; Poignet, P. Sparse-view CBCT reconstruction via weighted Schatten p-norm minimization. Opt. Express 2020, 28, 35469–35482. [Google Scholar] [CrossRef] [PubMed]
- IEC. IEC 61217:2011. Available online: https://webstore.iec.ch/publication/4929 (accessed on 7 December 2011).
- Zhang, J.; He, B.; Yang, Z.; Kang, W. A Novel Geometric Parameter Self-Calibration Method for Portable CBCT Systems. Electronics 2023, 12, 720. [Google Scholar] [CrossRef]
- Liu, L.; Yin, Z.; Ma, X. Nonparametric optimization of constrained total variation for tomography reconstruction. Comput. Biol. Med. 2013, 43, 2163–2176. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Ma, J.; Fan, Y.; Liang, Z. Adaptive-weighted total variation minimization for sparse data toward low-dose x-ray computed tomography image reconstruction. Phys. Med. Biol. 2012, 57, 7923. [Google Scholar] [CrossRef] [PubMed]
- Tian, Z.; Jia, X.; Yuan, K.; Pan, T.; Jiang, S.B. Low-dose CT reconstruction via edge-preserving total variation regularization. Phys. Med. Biol. 2011, 56, 5949. [Google Scholar] [CrossRef] [PubMed]
- Biguri, A. Iterative Reconstruction and Motion Compensation in Computed Tomography on GPUs. Ph.D. Thesis, University of Bath, Bath, UK, 2018. [Google Scholar]
- TICA. The Cancer Imaging Archive. Available online: http://www.cancerimagingarchive.net (accessed on 20 December 2016).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE | PSNR | SSIM | |
|---|---|---|---|
| FDK | 0.01482 | 18.29061 | 0.70205 |
| OS-SART | 0.00069 | 31.61237 | 0.93187 |
| ASD-POCS | 0.00006 | 42.01851 | 0.98943 |
| OS-ASD-POCS | 0.00032 | 35.00853 | 0.96763 |
| Proposed Method | 0.00008 | 44.54638 | 0.98968 |
| RMSE | PSNR | SSIM | Time Consumption (Second) | |
|---|---|---|---|---|
| FDK | 0.14376 | 8.42370 | 0.68207 | 514.73 |
| OS-SART | 0.14018 | 8.53299 | 0.58307 | 30,420.12 |
| ASD-POCS | 0.14020 | 8.53264 | 0.68359 | 376,080.45 |
| OS-ASD-POCS | 0.14020 | 8.53257 | 0.58362 | 57,120.36 |
| Proposed Method | 0.14420 | 8.56196 | 0.70640 | 58,648.75 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; He, B.; Yang, Z.; Kang, W. A Novel Reconstruction of the Sparse-View CBCT Algorithm for Correcting Artifacts and Reducing Noise. Mathematics 2023, 11, 2127. https://doi.org/10.3390/math11092127
Zhang J, He B, Yang Z, Kang W. A Novel Reconstruction of the Sparse-View CBCT Algorithm for Correcting Artifacts and Reducing Noise. Mathematics. 2023; 11(9):2127. https://doi.org/10.3390/math11092127
Chicago/Turabian StyleZhang, Jie, Bing He, Zhengwei Yang, and Weijie Kang. 2023. "A Novel Reconstruction of the Sparse-View CBCT Algorithm for Correcting Artifacts and Reducing Noise" Mathematics 11, no. 9: 2127. https://doi.org/10.3390/math11092127