
A Novel Kinematics Model of Flip-Flow Screen Panel: Inclined Catenary Model
Abstract
:1. Introduction
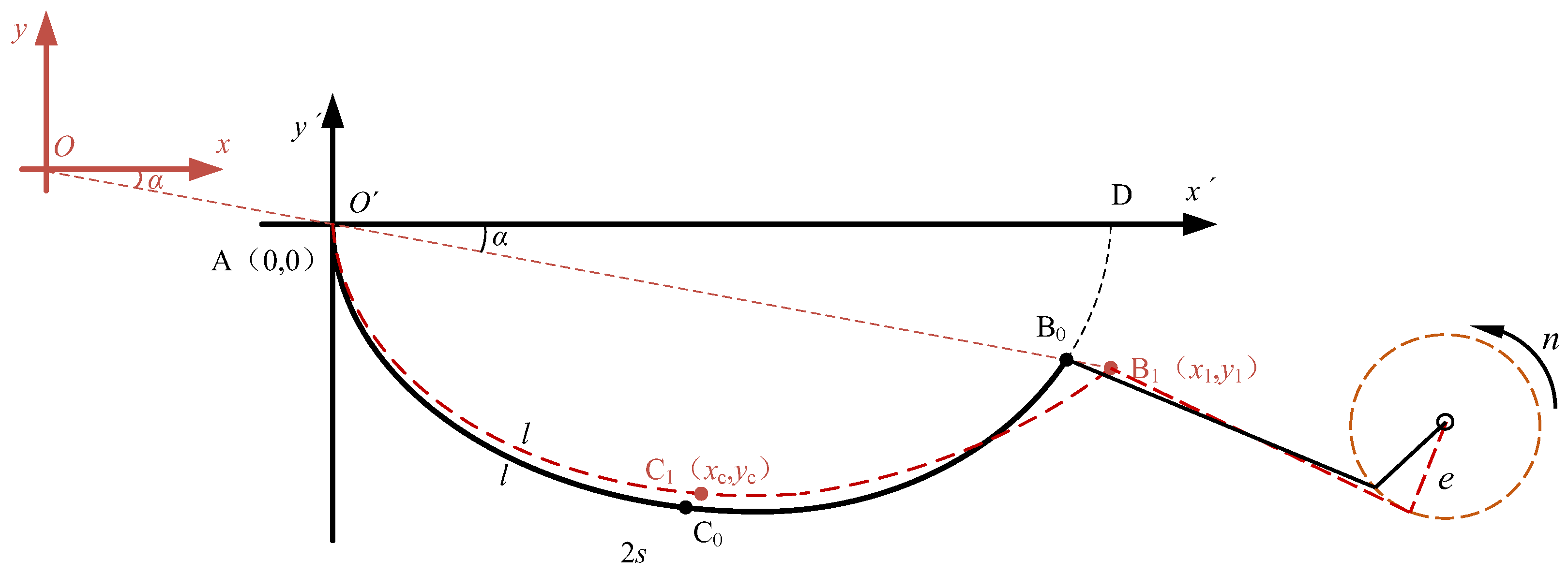
2. Mathematical Model
3. Results and Discussion
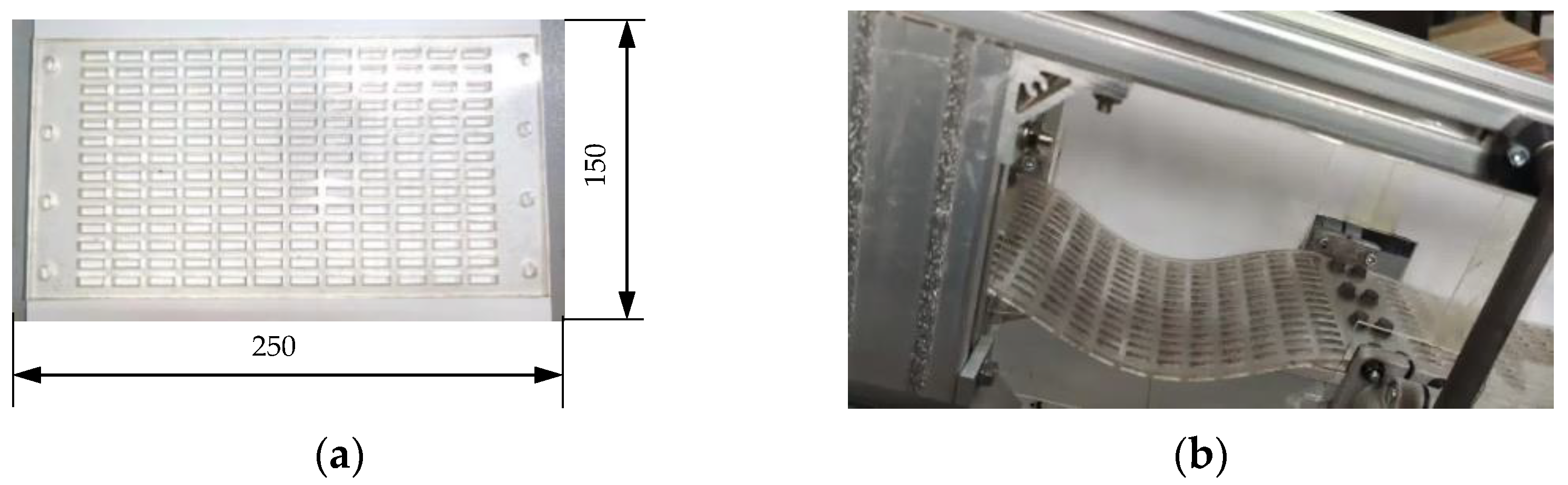
3.1. Verification of the Inclined Catenary Model
3.2. Comparison of Four Kinematic Models
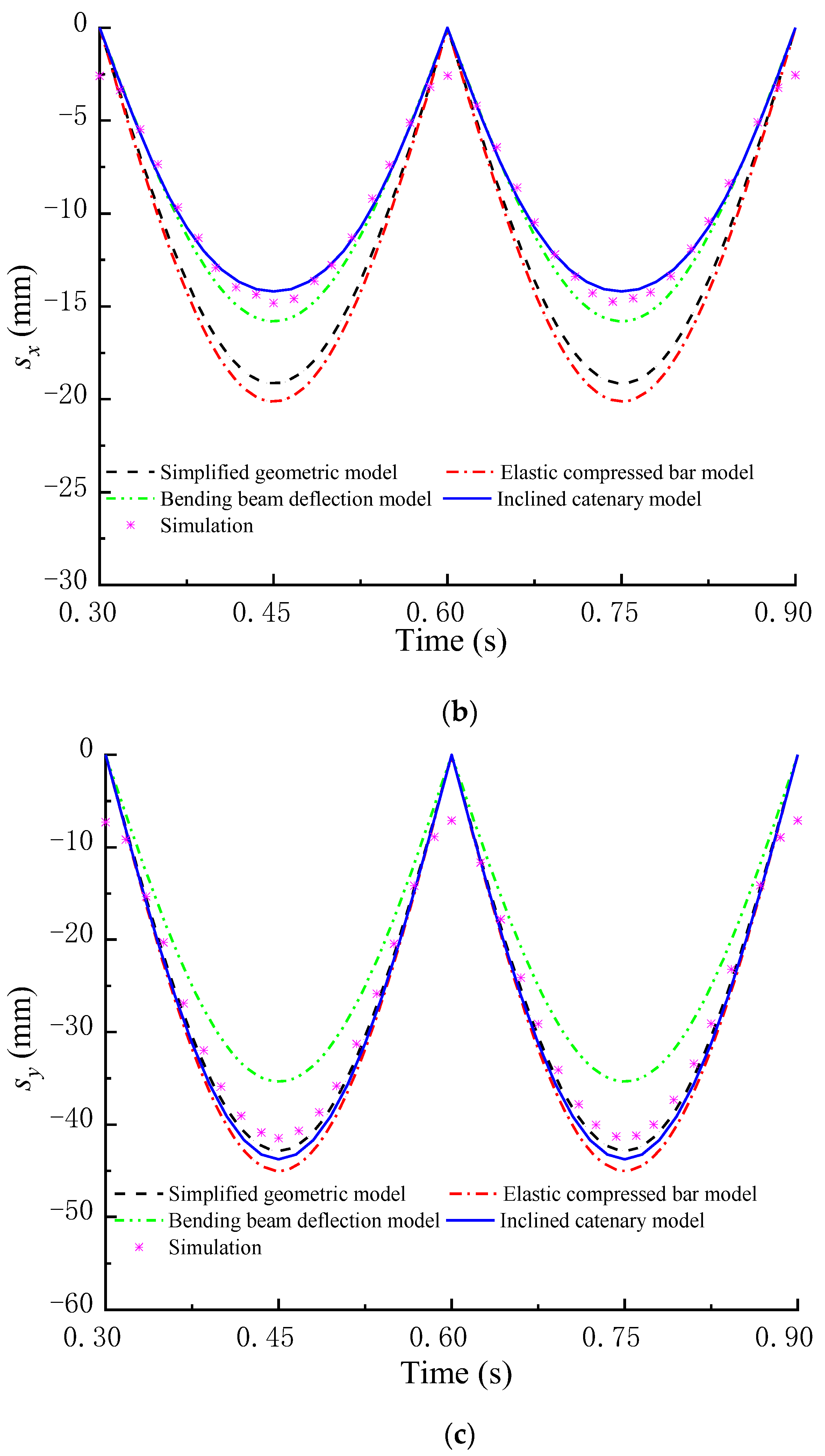
3.2.1. Comparison of Displacement
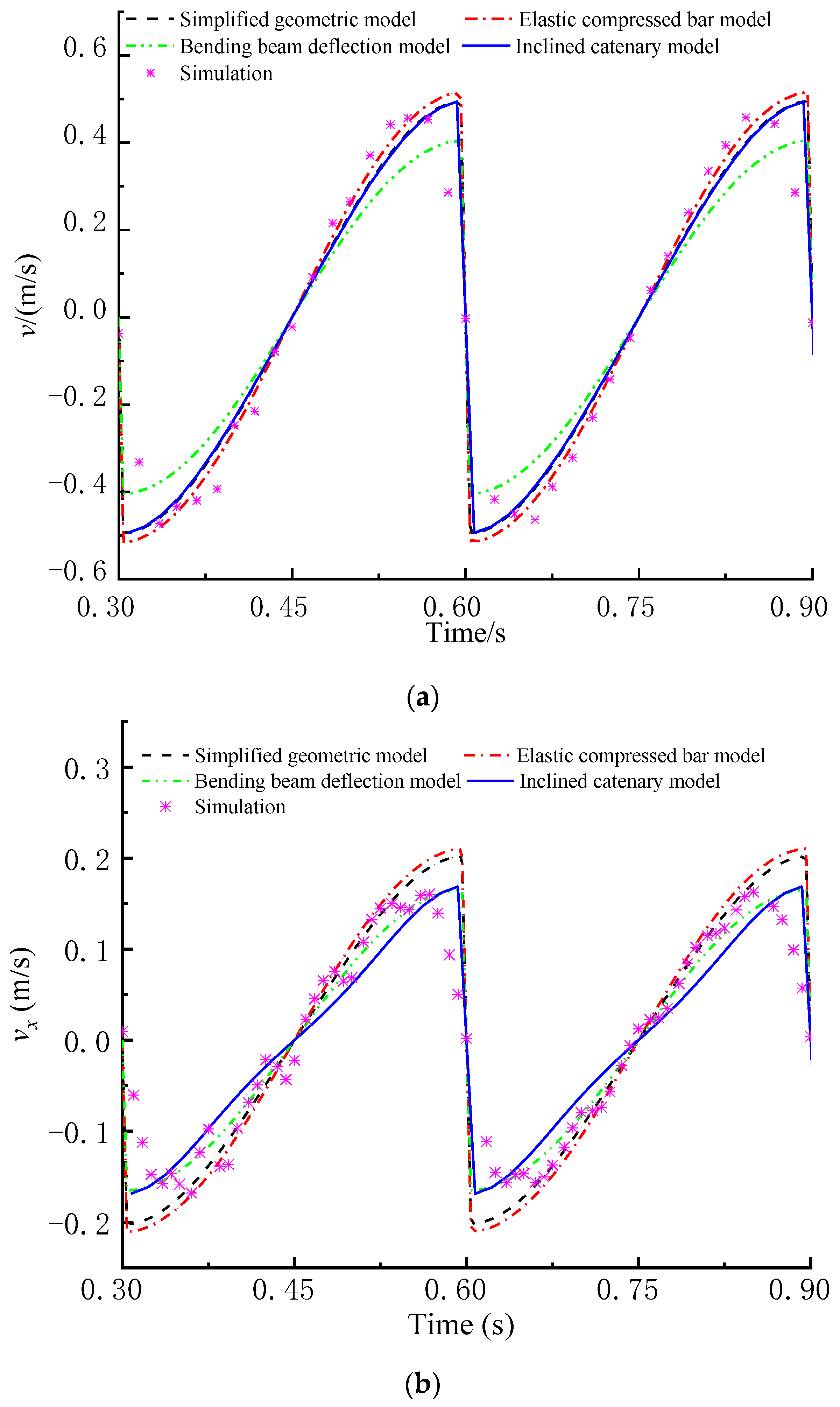
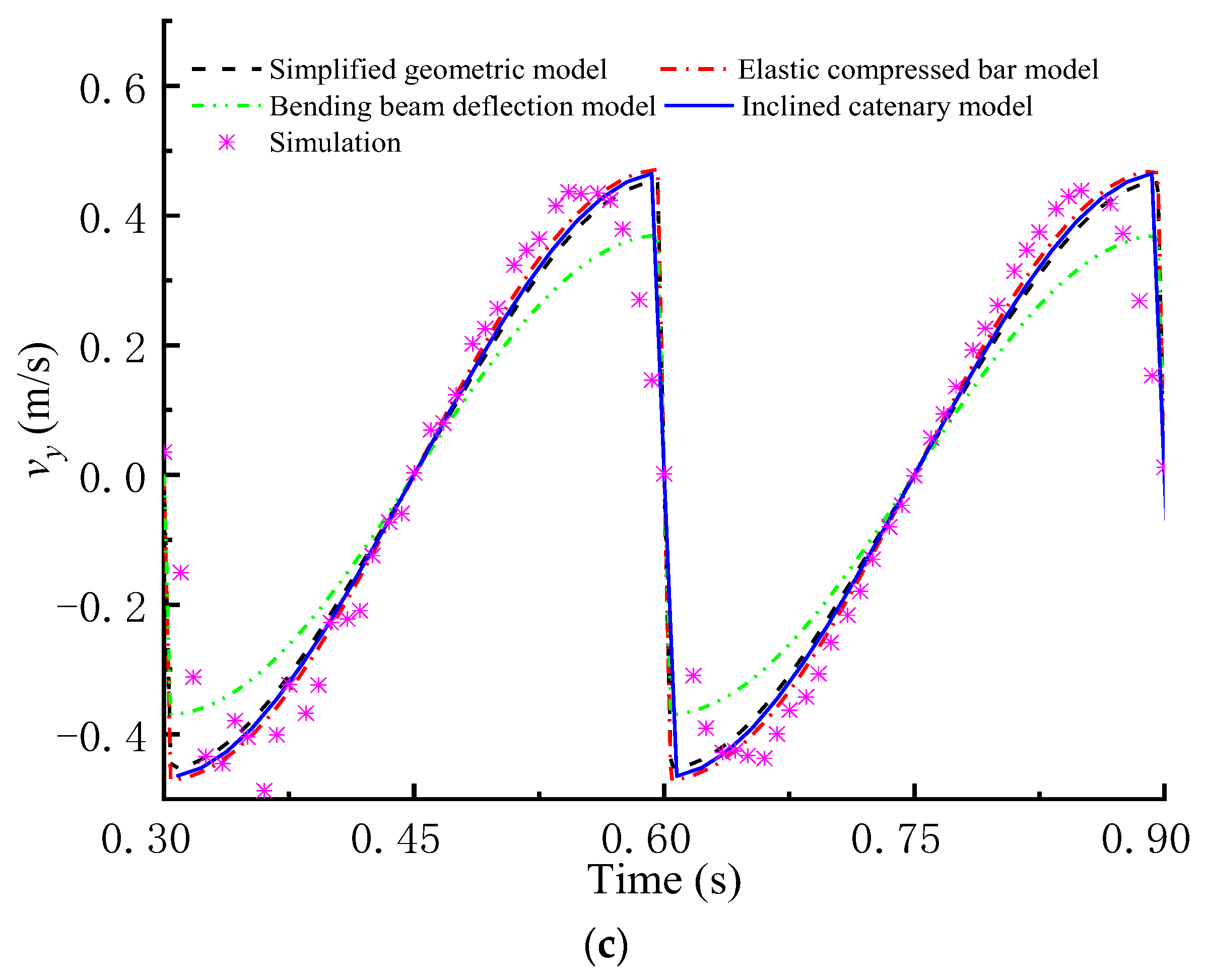
3.2.2. Comparison of Velocity
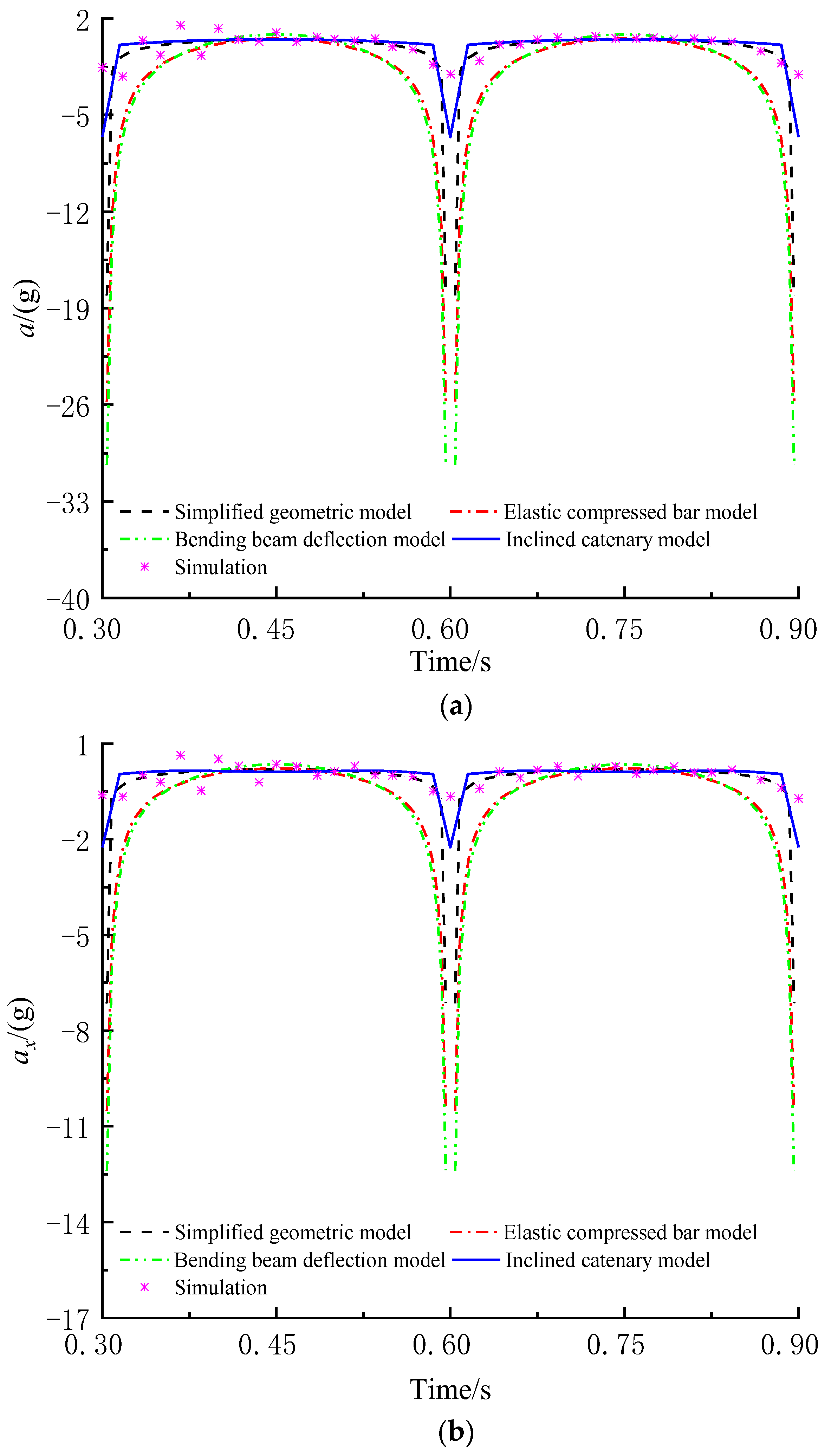
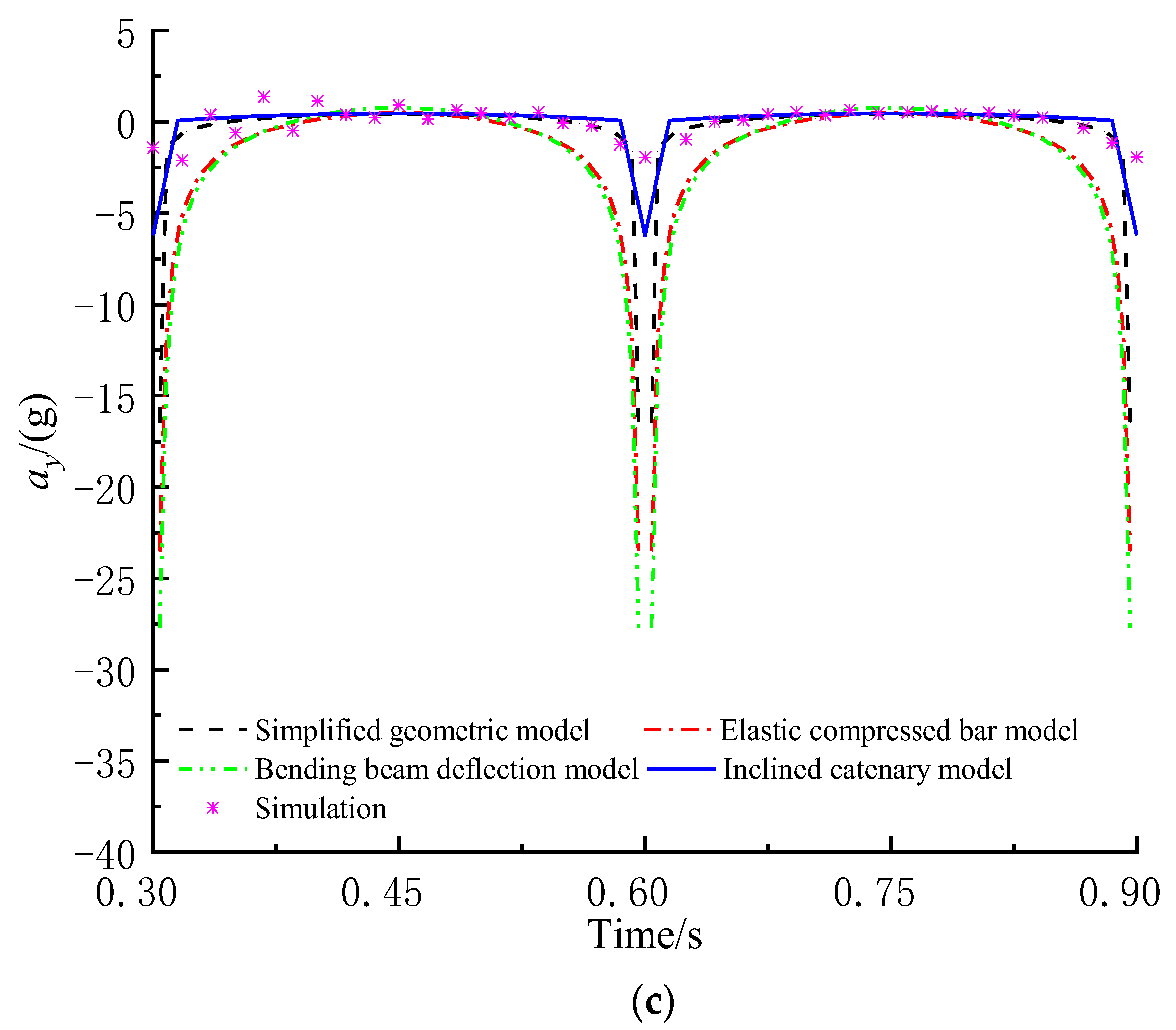
3.2.3. Comparison of Acceleration
3.3. Effects of n, e, α and Δl on Kinematic Characteristics
3.3.1. Effect of Rotation Speed n
3.3.2. Effect of Eccentricity e
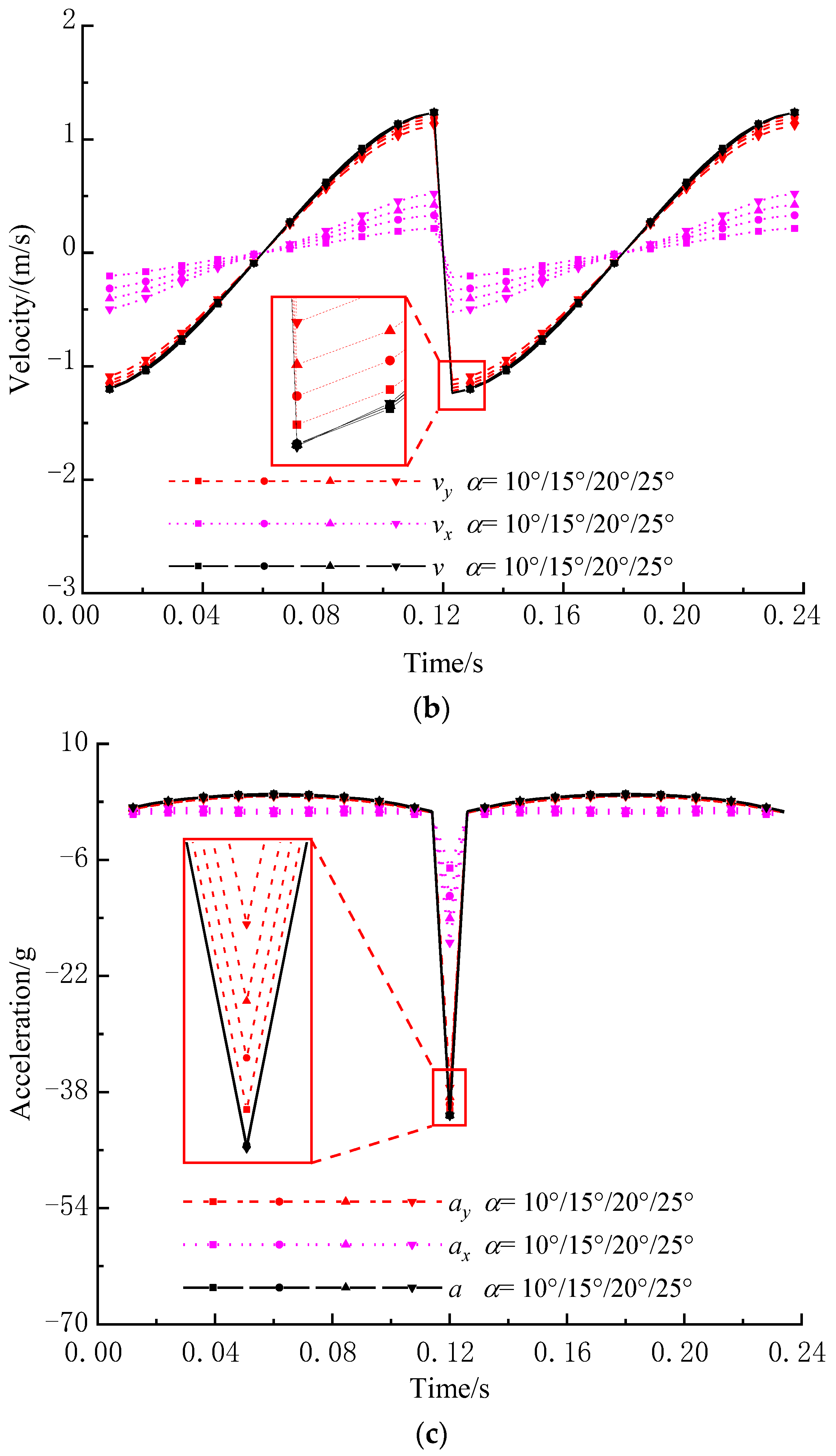
3.3.3. Effect of Incline Angle α
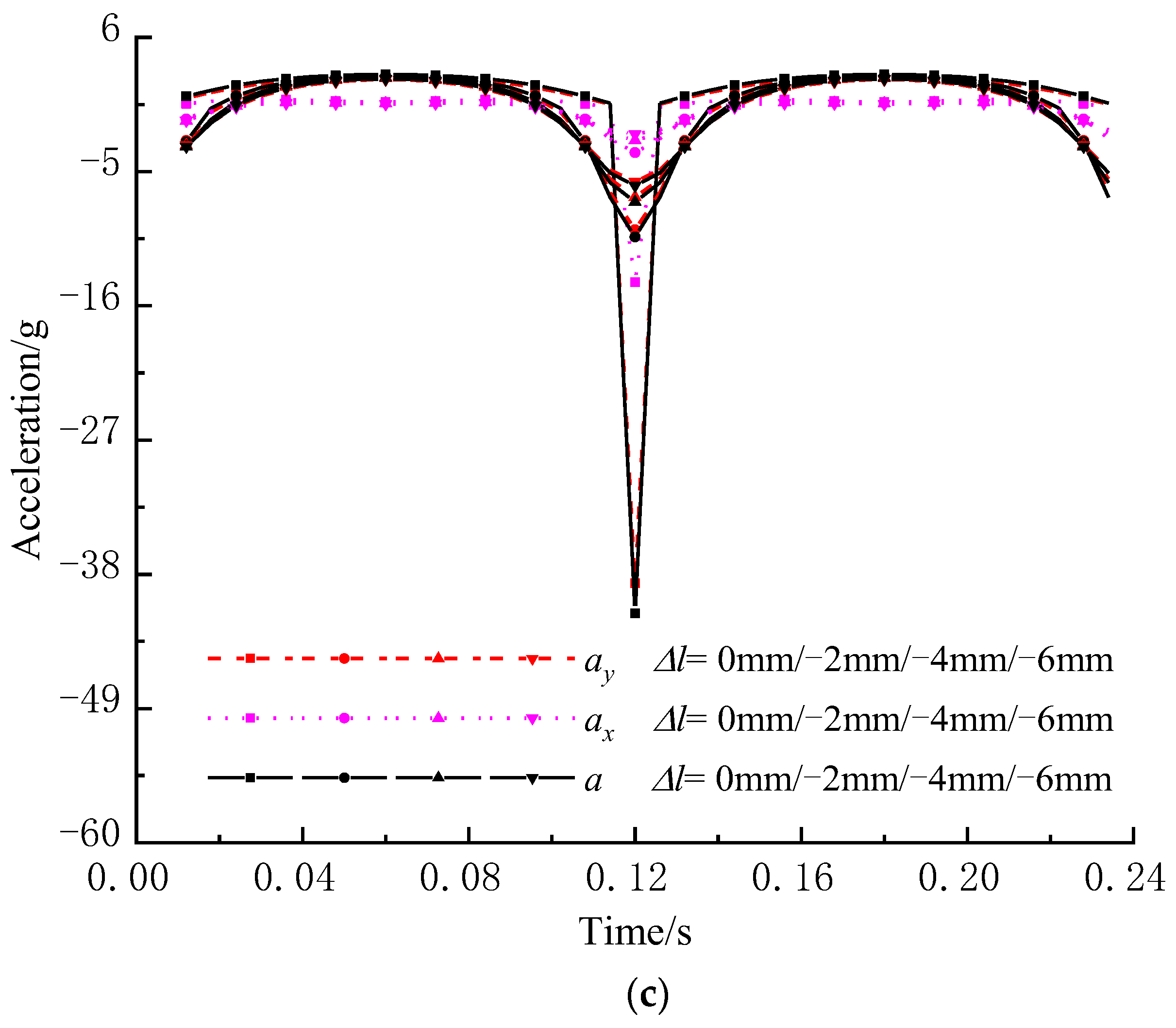
3.3.4. Effect of Tensional Amount Δl
4. Conclusions
- (1)
- A novel kinematic model of the flip-flow screen panel, namely the inclined catenary model, is developed. Displacement, velocity and acceleration of each point in the screen panel can be calculated by using the inclined catenary model, and the effects of screening parameters on kinematic characteristics can be obtained.
- (2)
- After comparing theoretical kinematic characteristics with experimental kinematic characteristics, the inclined catenary model possesses higher prediction accuracy for trajectory, displacement, velocity and acceleration of the flip-flow screen panel than three previous kinematic models.
- (3)
- With the increase in n, the absolute value of velocity and acceleration increases, while the maximum absolute value of displacement remains unchanged. With the increase in e, the absolute value of displacement, velocity and acceleration increases. With the increase in α, the absolute value of transverse components of displacement, velocity and acceleration increases slowly and the absolute value of longitudinal components of displacement, velocity and acceleration decreases slightly. With the increase in Δl, the absolute value of displacement, velocity and acceleration increases.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, Z.; Huang, L.; Jiang, H.; Wen, P.; Zhao, L.L.; Zhao, Y.; Duan, C.; Luo, Z.; Wang, Z.; Liu, C. Kinematics of elastic screen surface and elimination mechanism of plugging during dry deep screening of moist coal. Powder Technol. 2019, 346, 452–461. [Google Scholar] [CrossRef]
- Yu, C.; Geng, R.; Wang, X. A Numerical Study of Separation Performance of Vibrating Flip-Flow Screens for Cohesive Particles. Minerals 2021, 11, 631. [Google Scholar] [CrossRef]
- Wang, K. Present Situation and Development of Vibrating Screen in China. J. New Energy Dev. 2020, 1, 18–21. [Google Scholar]
- Tang, J.; Niu, L.; Xiong, X.; Jie, S. Viscoelasticity of Rubber Springs Affects Vibration Characteristics of a Flip-Flow Screen with the High G Value. IEEE Access 2020, 8, 26950–26965. [Google Scholar] [CrossRef]
- Yu, C.; Wang, X.; Gong, S.; Pang, K.; Zhao, G.; Zhou, Q.; Lin, D.; Xu, N. Stability analysis of the screening process of a vibrating flip-flow screen. Miner. Eng. 2021, 163, 106794. [Google Scholar] [CrossRef]
- Yu, C.; Wang, X.; Pang, K.; Zhao, G.; Sun, W. Dynamic Characteristics of a Vibrating Flip-Flow Screen and Analysis for Screening 3 mm Iron Ore. Shock. Vib. 2020, 2020, 1031659. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, Y.; Chen, Z. The Basic Dynamics Study of Flip-Flow Screen and Particles Based on MATLAB. Appl. Mech. Mater. 2013, 444–445, 1340–1344. [Google Scholar] [CrossRef]
- Zou, M.; Liu, C.; Wu, J.; Wang, Z. Influence of tensional amount on dynamic parameters of unilateral driven flip-flow screen surface. J. China Coal Soc. 2018, 43, 567–571. [Google Scholar]
- Li, H.; Liu, C.; Shen, L.; Zhao, L.; Li, S. Kinematics characteristics of the flip-flow screen with a crankshaft-link structure and screening analysis for moist coal. Powder Technol. 2021, 394, 326–335. [Google Scholar] [CrossRef]
- Li, H.; Liu, C.; Shen, L.; Zhao, L. Vibration Characteristics of an Industrial-Scale Flip-Flow Screen with Crank-Link Structure and Parameters Optimization. Shock. Vib. 2021, 2021, 2612634. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, C.; Fan, M.; Wei, L. Research on acceleration of elastic flip-flow screen surface. Int. J. Miner. Process. 2000, 59, 267–274. [Google Scholar] [CrossRef]
- Peng, L.; Li, F.; Dong, H.; Liu, C.; Zhao, Y.; Duan, C. Characteristics analysis of a novel centralized-driving flip-flow screen. Int. J. Min. Sci. Tech. 2014, 24, 195–200. [Google Scholar] [CrossRef]
- Peng, L.; Liu, C.; Dong, H.; Li, J.; Xia, Y. Analysis and experiment on the large nonlinear deformation of a flip-flow screen. J. China Coal Soc. 2014, 39, 976–980. [Google Scholar]
- Zuber, J. Screening of difficult materials on bivitec screens with flip-flow systems. Aufbereit. Tech. 1995, 36, 303–305. [Google Scholar]
- Chen, B.; Yu, C.; Gong, S.; Wang, X. Dynamic characteristics of LIWELL flip-flow screen panel and particle movement. Chem. Eng. Sci. 2021, 245, 116853. [Google Scholar] [CrossRef]
- Xiong, X.; Niu, L.; Gu, C.; Wang, Y. Vibration characteristics of an inclined flip-flow screen panel in banana flip-flow screens. J. Sound Vib. 2017, 411, 108–128. [Google Scholar] [CrossRef]
- Wu, B.; Zhang, X.; Niu, L.; Xiong, X.; Dong, Z.; Tang, J. Research on Sieving Performance of Flip-flow Screen Using Two-way Particles-screen Panels Coupling Strategy. IEEE Access 2019, 7, 124461–124473. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Slack Amount | 0 mm | 4 mm | 8 mm | 12 mm | |
|---|---|---|---|---|---|
| Error | |||||
| Inclined catenary model | 0 mm | 1.1 mm | 1.4 mm | 1.5 mm | |
| Elastic compressed bar model [11] | 0 mm | 2.8 mm | 3.1 mm | 4.5 mm | |
| Model | Simplified Geometric Model [7] | Elastic Compressed Bar Model [11] | Bending Beam Deflection Model [14] | Inclined Catenary Model | |
|---|---|---|---|---|---|
| Error | |||||
| s (mm) | 2.860 | 5.247 | 5.334 | 1.943 | |
| sx (mm) | 4.332 | 5.306 | 0.989 | 0.618 | |
| sy (mm) | 1.343 | 3.512 | 6.137 | 2.264 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, J.; He, Z.; Zhang, Y.; Wang, M. A Novel Kinematics Model of Flip-Flow Screen Panel: Inclined Catenary Model. Mathematics 2023, 11, 2028. https://doi.org/10.3390/math11092028
Fan J, He Z, Zhang Y, Wang M. A Novel Kinematics Model of Flip-Flow Screen Panel: Inclined Catenary Model. Mathematics. 2023; 11(9):2028. https://doi.org/10.3390/math11092028
Chicago/Turabian StyleFan, Jingfeng, Zhanshu He, Yifei Zhang, and Mingli Wang. 2023. "A Novel Kinematics Model of Flip-Flow Screen Panel: Inclined Catenary Model" Mathematics 11, no. 9: 2028. https://doi.org/10.3390/math11092028