
Optimal Control and Parameters Identification for the Cahn–Hilliard Equations Modeling Tumor Growth

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Functional Setting, Assumptions and Previous Results
- The potential function is such that where and satisfying for all and . In addition, we assume that for all andfor all .
- The proliferation function satisfies either one of the following properties for all
3. Parameters Identification and Optimal Problem
3.1. Study of the Linearized-State System
3.2. Fréchet Differentiability of the Control to State Map
3.3. The Adjoint System
3.4. Necessary Optimality Condition
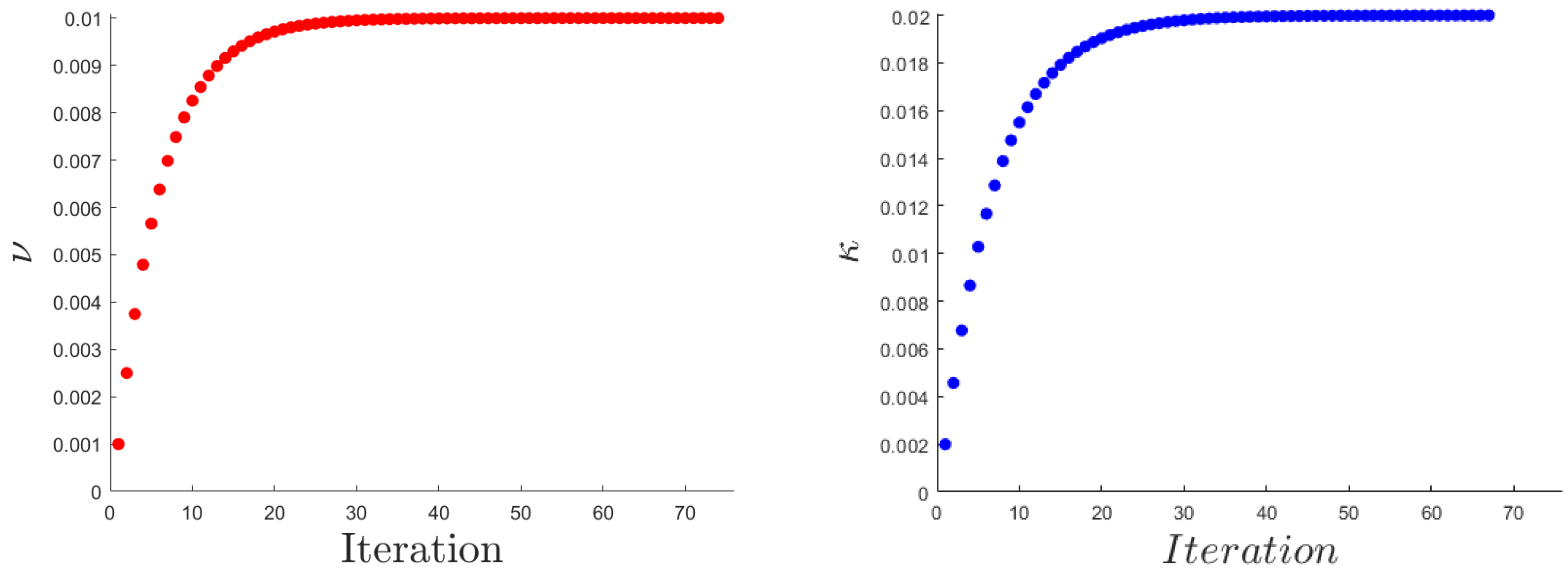
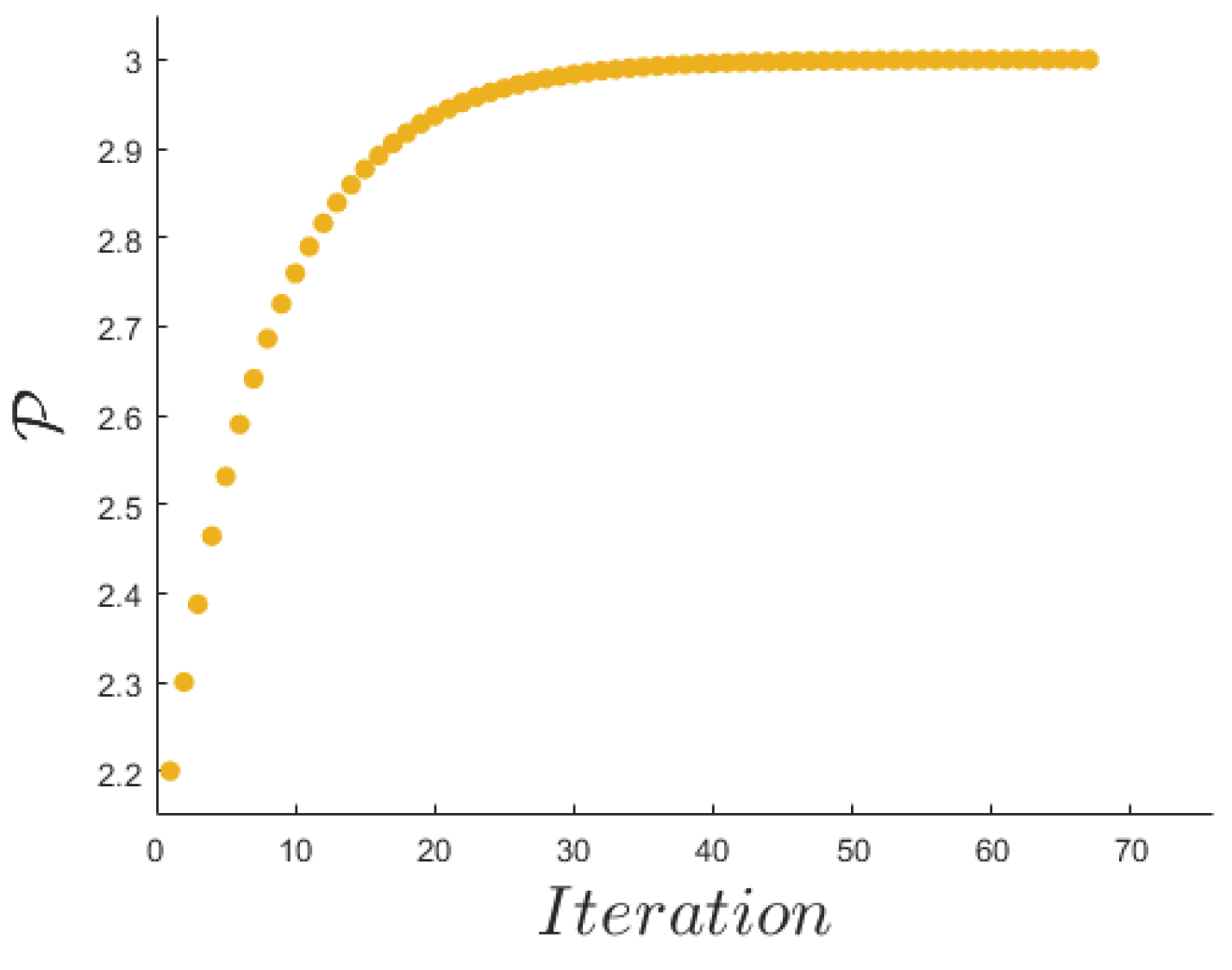
4. Numerical Illustration
| Algorithm 1 Gauss-Newton scheme |
| procedureGauss–Newton(, ) |
| , , |
| while ( and and ( and ) and ( and ) do |
| for do |
| Solve the problem (22) |
| end for |
| Find such that |
| with |
| if and and then |
| Stop |
| end if |
| end while |
| return |
| end procedure |
4.1. Validation Test
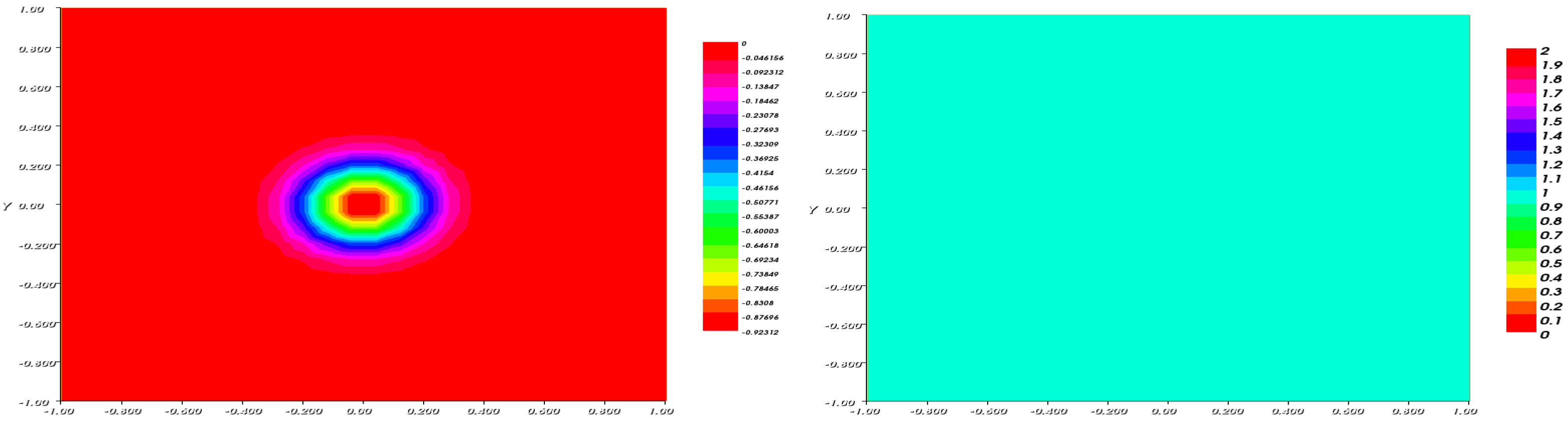
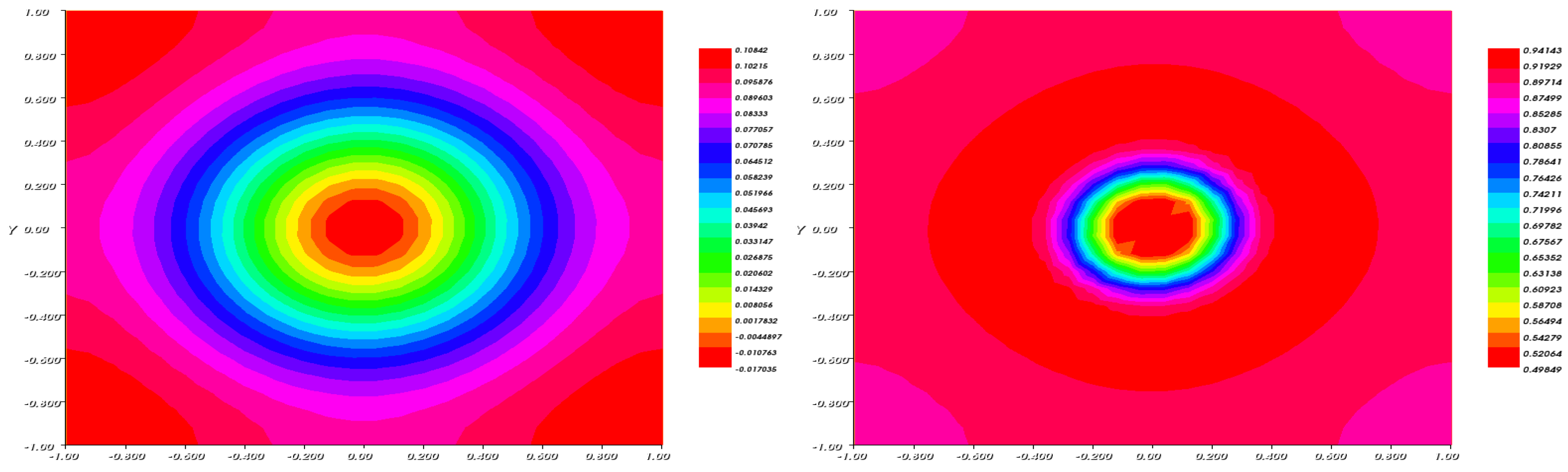
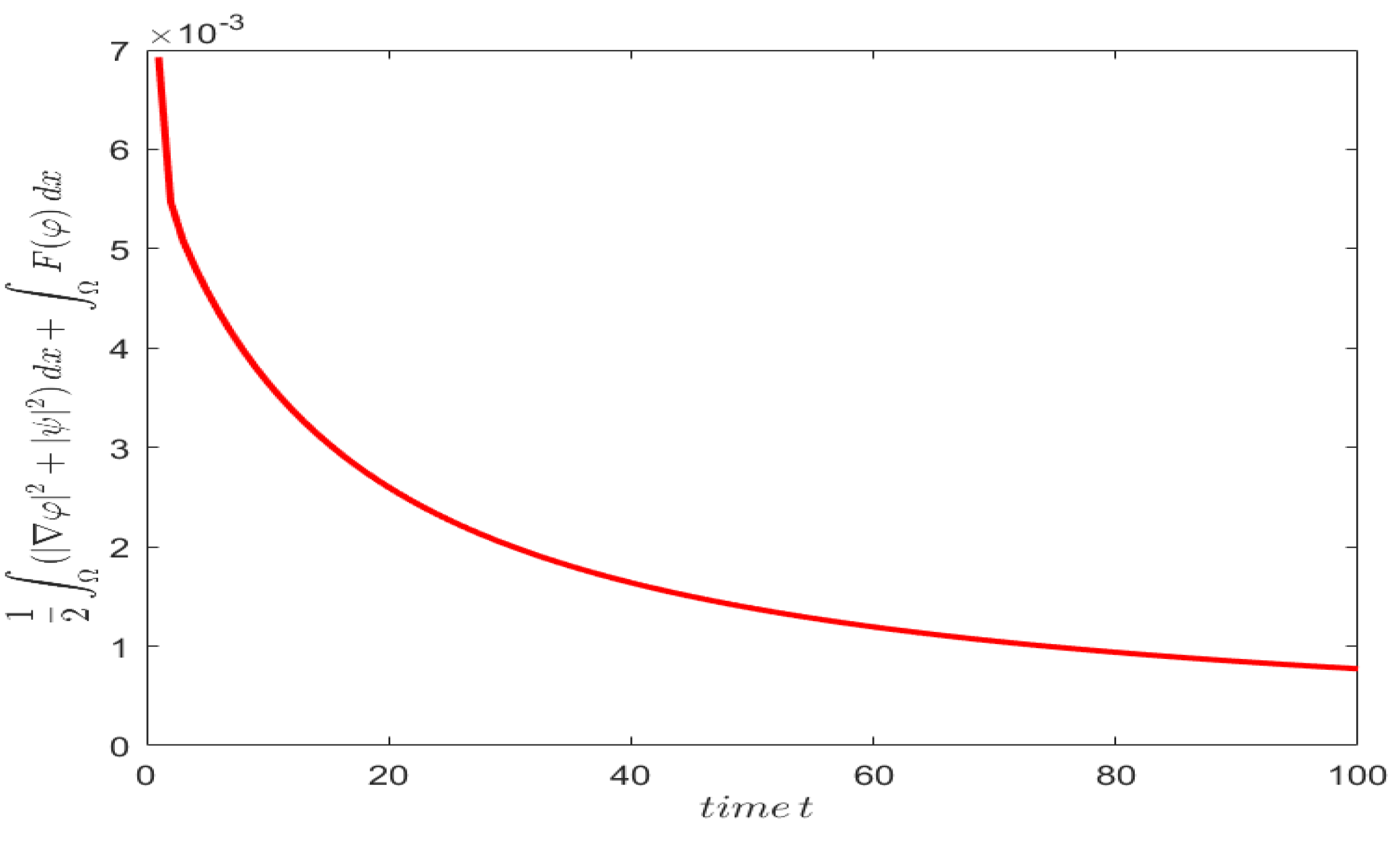
4.2. Tumor Growth Computation
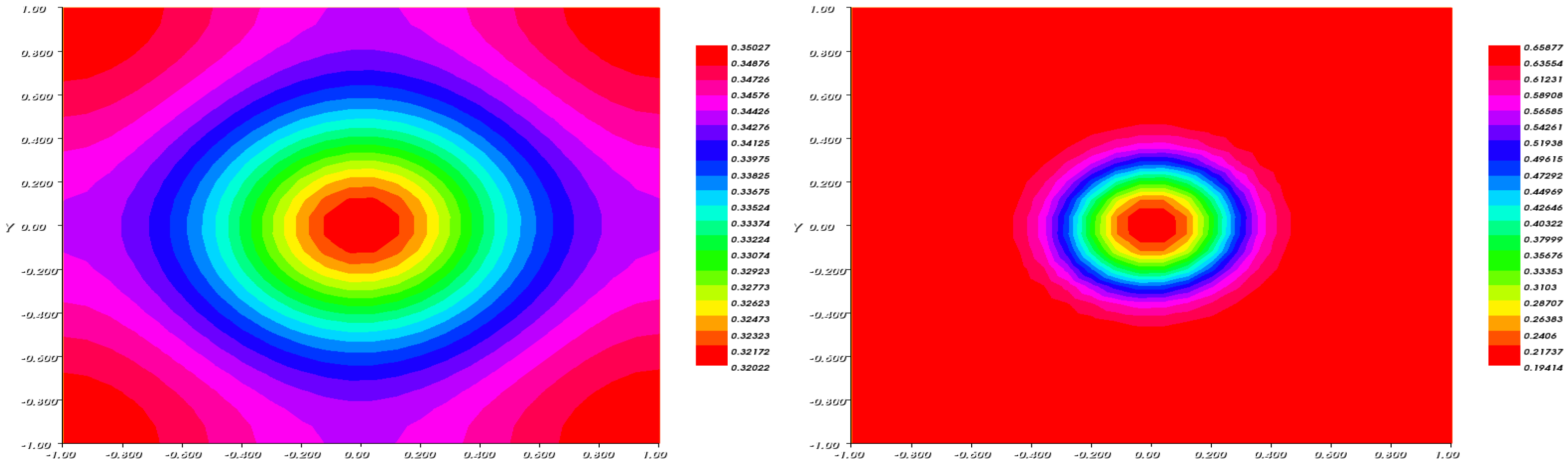
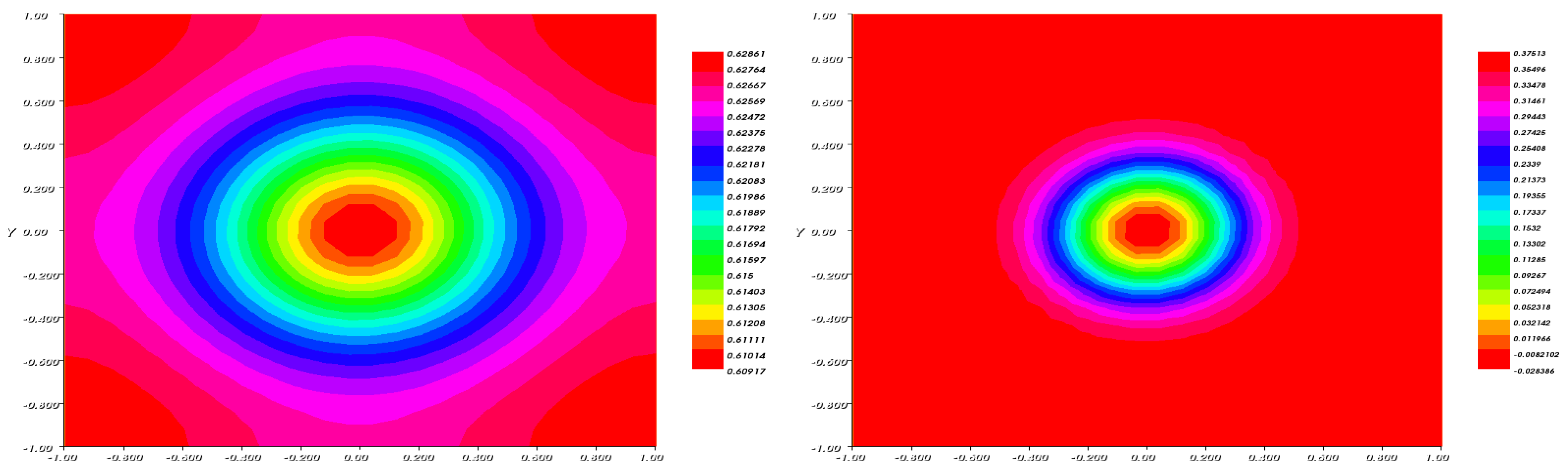
4.2.1. Two-Dimensional (2D) Case
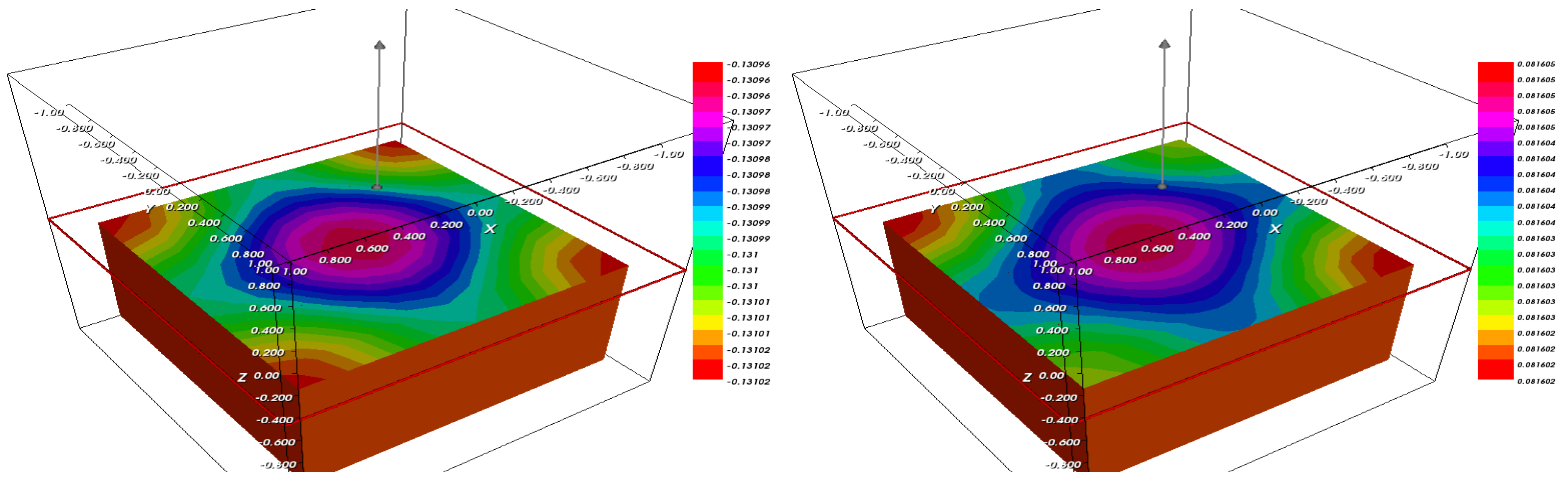
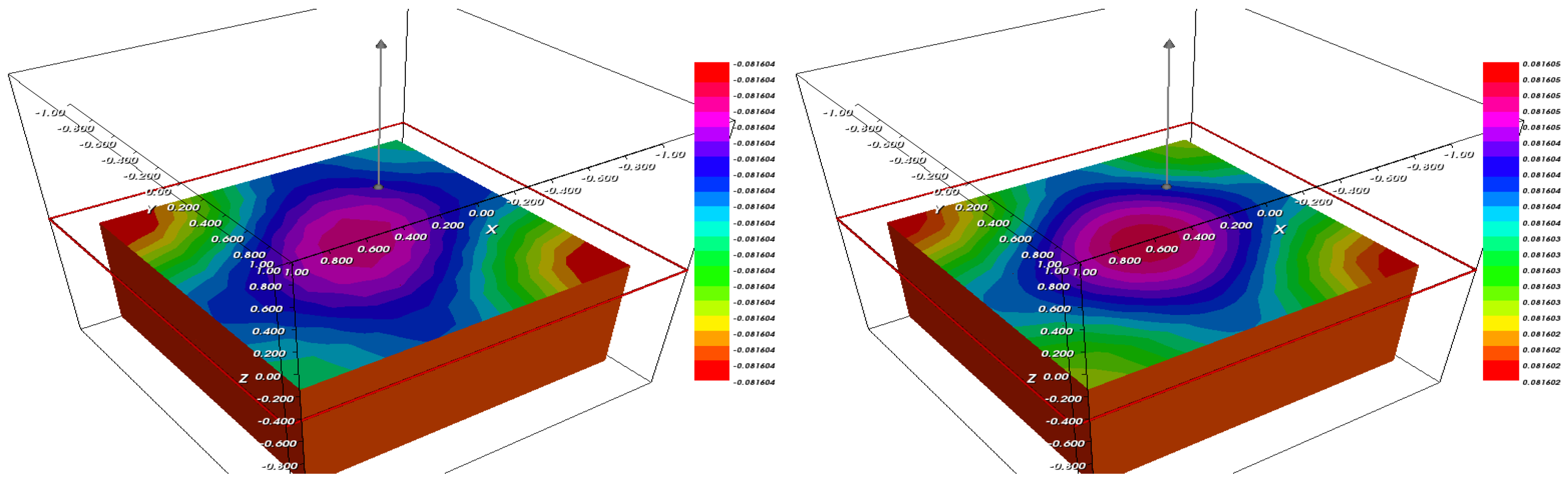
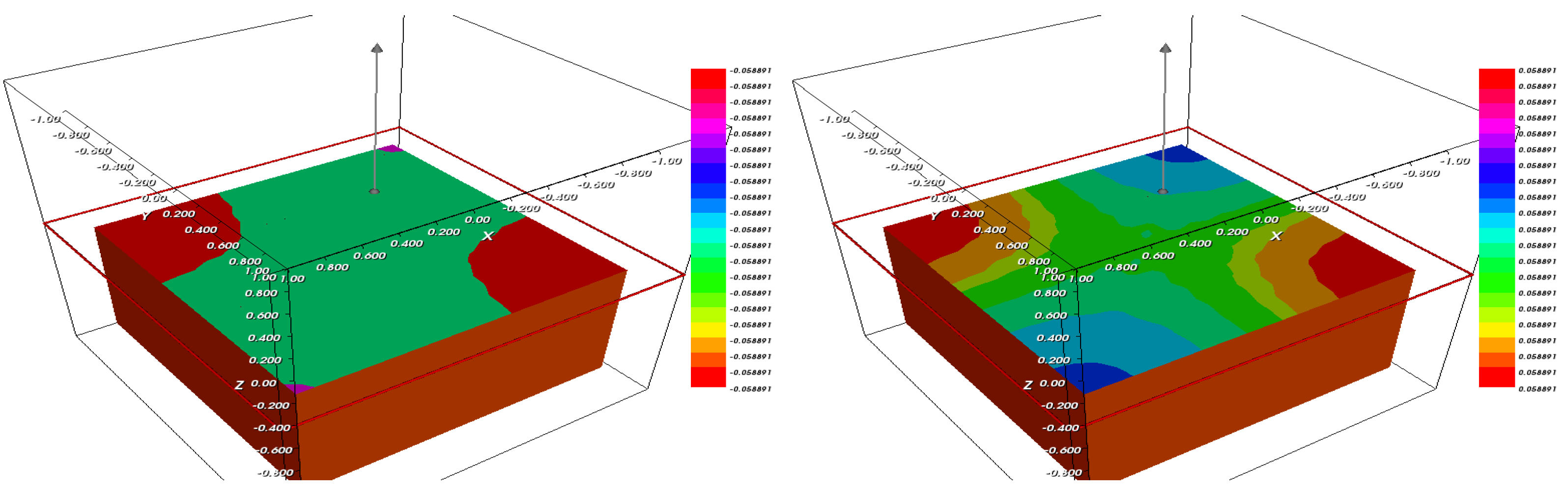
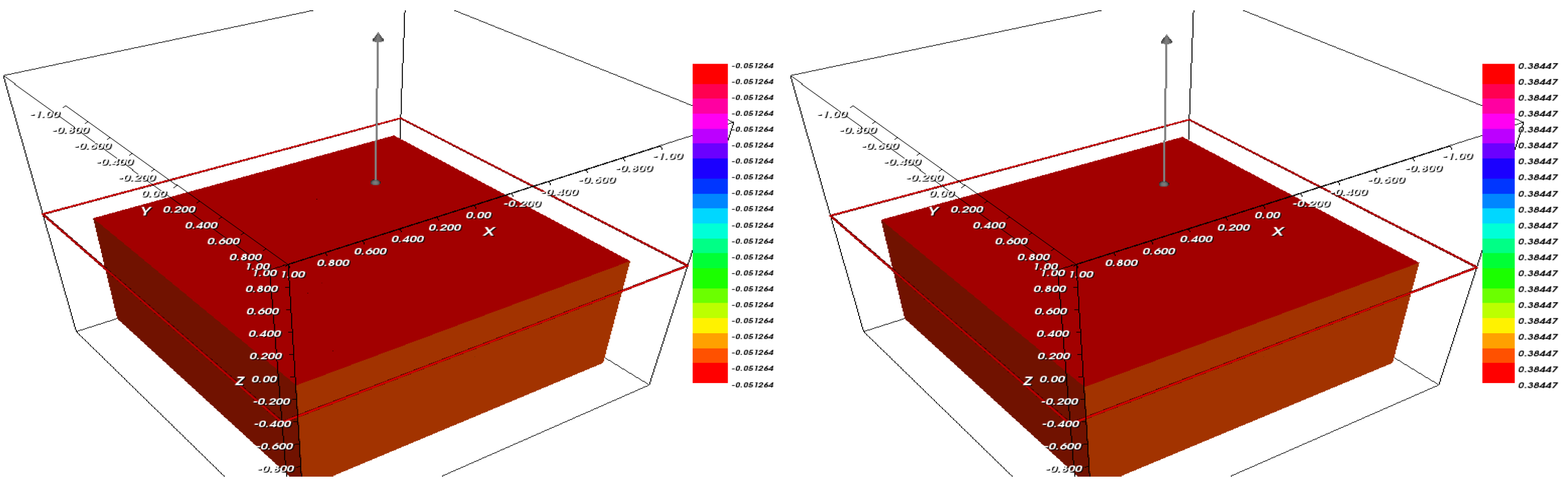
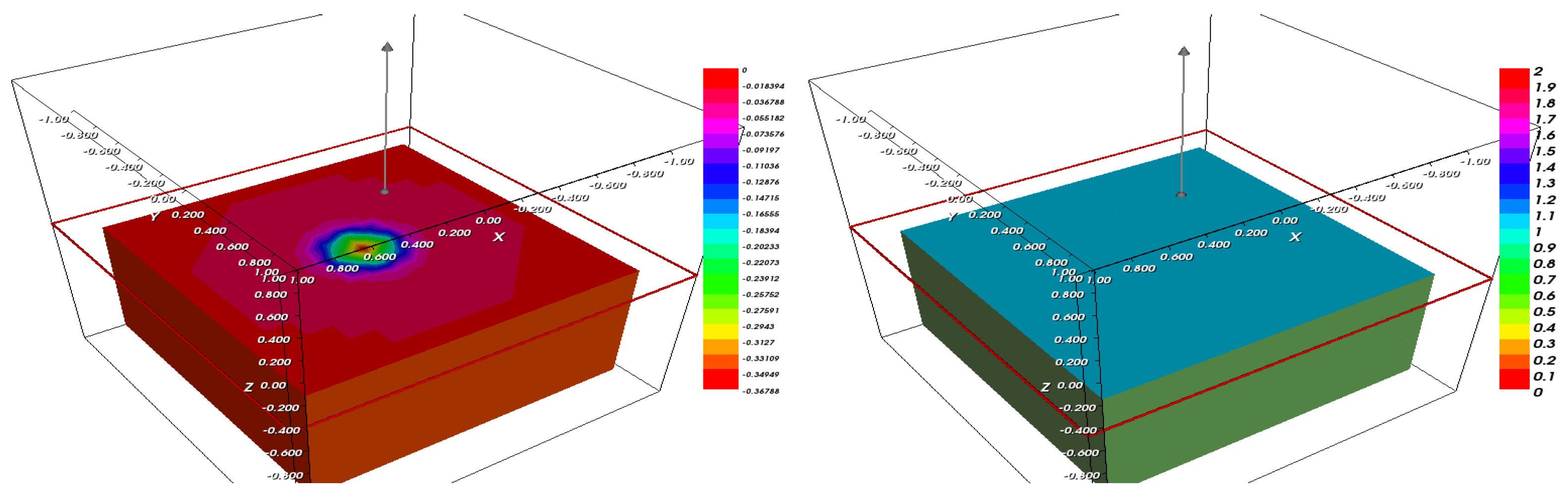
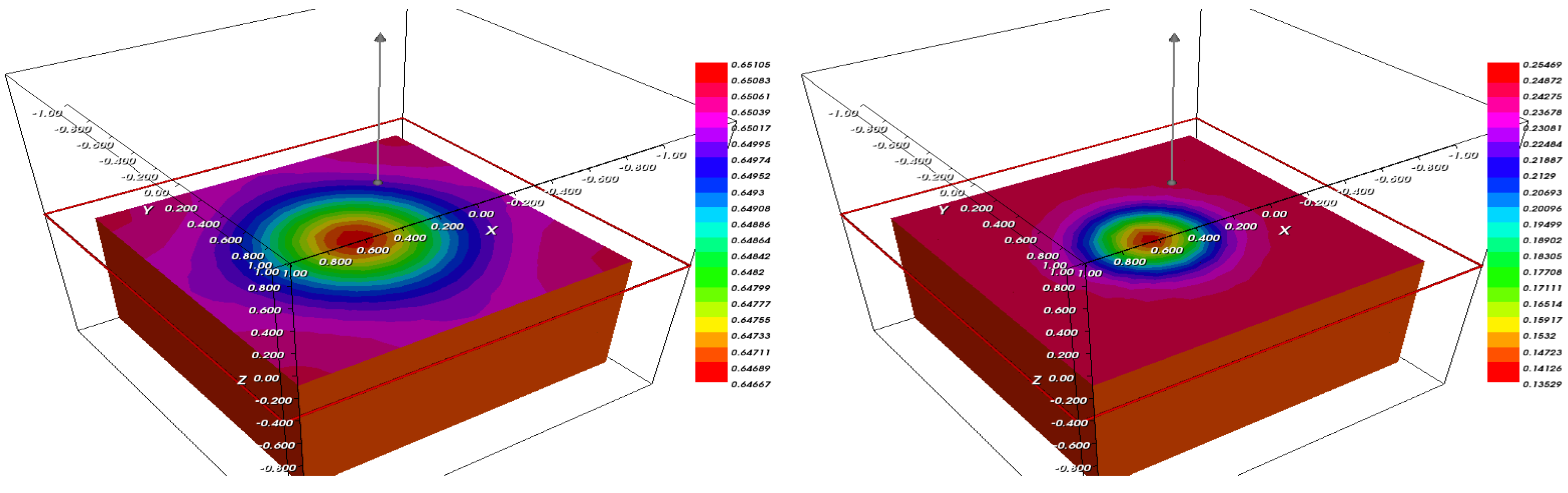
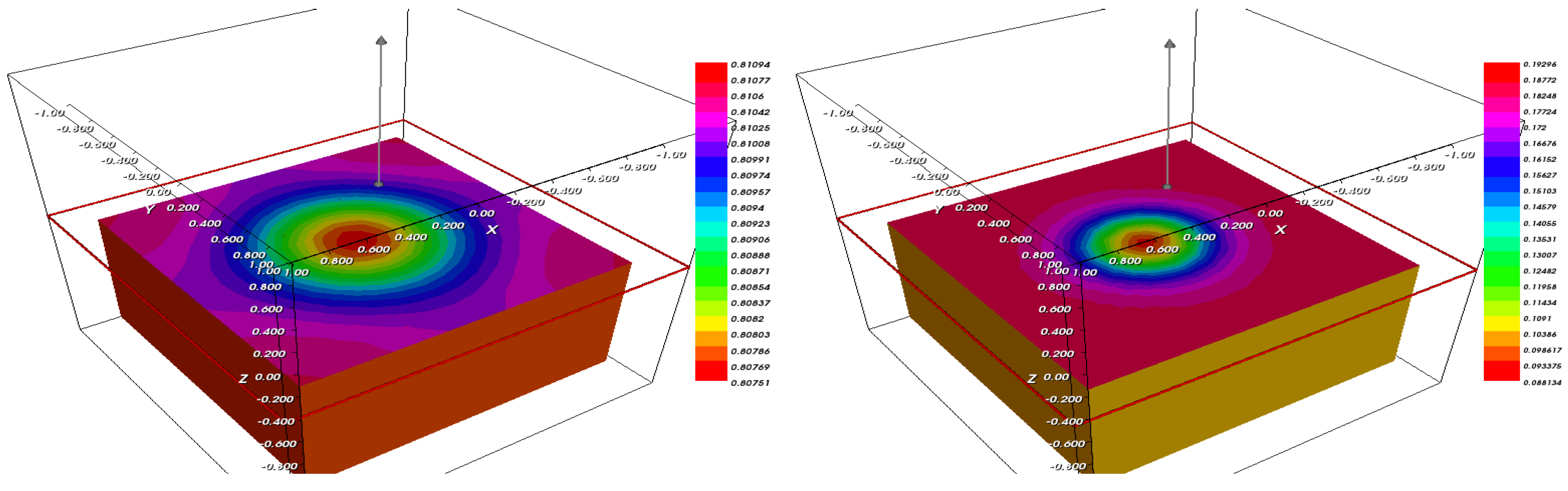
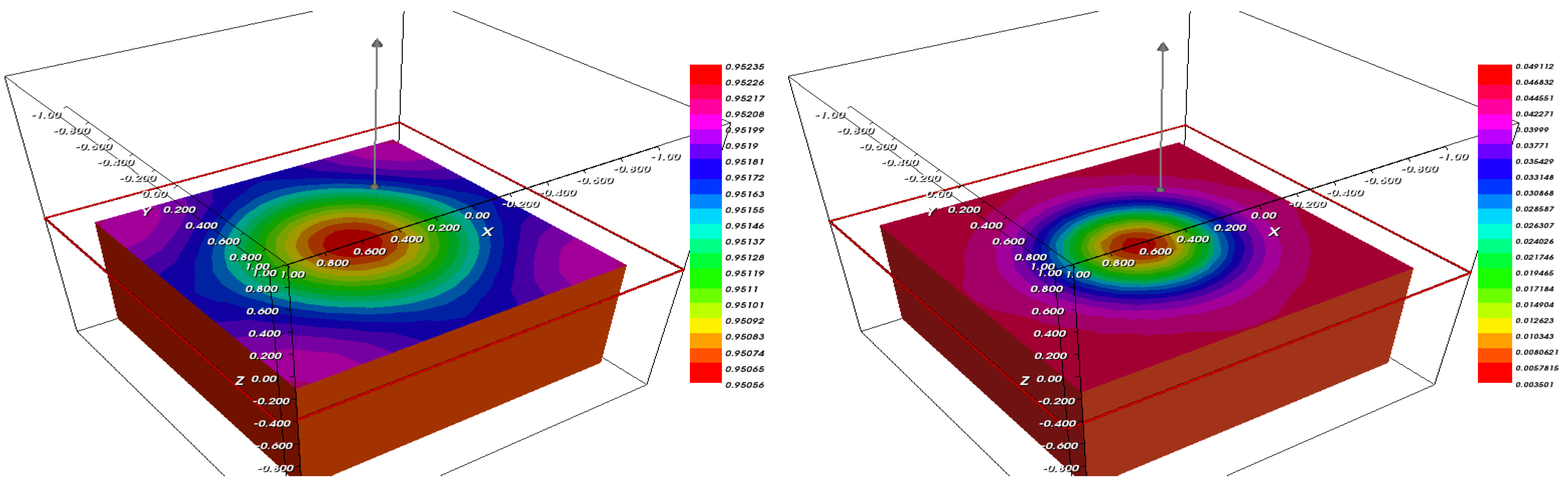
4.2.2. Three-Dimensional (3D) Case
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Frigeri, S.; Grasselli, M.; Rocca, E. On a diffuse interface model of tumour growth. Eur. J. Appl. Math. 2015, 26, 215–243. [Google Scholar] [CrossRef]
- Garcke, H.; Yayla, S. Long-time dynamics for a Cahn–Hilliard tumor growth model with chemotaxis. Z. FüR Angew. Math. Und Phys. 2020, 71, 1–32. [Google Scholar] [CrossRef]
- Hawkins-Daarud, A.; Van der Zee, K.G.; Oden, J.T. Numerical simulation of a thermodynamically consistent four-species tumor growth model. Int. J. Numer. Methods Biomed. Eng. 2012, 28, 3–24. [Google Scholar] [CrossRef] [PubMed]
- Miranville, A. The Cahn–Hilliard equation: Recent advances and applications. Soc. Ind. Appl. Math. 2019, 123, 57–62. [Google Scholar]
- Araujo, R.P.; McElwain, D.S. A history of the study of solid tumour growth: The contribution of mathematical modelling. Bull. Math. Biol. 2004, 66, 1039–1091. [Google Scholar] [CrossRef]
- Cristini, V.; Lowengrub, J. Multiscale Modeling of Cancer: An Integrated Experimental and Mathematical Modeling Approach; Cambridge University Press: Cambridge, UK, 2010. [Google Scholar]
- Garcke, H.; Trautwein, D. Numerical analysis for a Cahn–Hilliard system modeling tumour growth with chemotaxis and active transport. J. Numer. Math. 2022, 30, 295–324. [Google Scholar] [CrossRef]
- Knopf, P.; Signori, A. Existence of weak solutions to multiphase Cahn–Hilliard–Darcy and Cahn–Hilliard–Brinkman models for stratified tumor growth with chemotaxis and general source terms. Commun. Partial. Differ. Equations 2022, 47, 233–278. [Google Scholar] [CrossRef]
- Lowengrub, J.S.; Frieboes, H.B.; Jin, F.; Chuang, Y.L.; Li, X.; Macklin, P.; Wise, S.M.; Cristini, V. Nonlinear modelling of cancer: Bridging the gap between cells and tumours. Nonlinearity 2009, 23, R1. [Google Scholar] [CrossRef] [Green Version]
- Oden, J.T.; Prudencio, E.E.; Hawkins-Daarud, A. Selection and assessment of phenomenological models of tumor growth. Math. Model. Methods Appl. Sci. 2013, 23, 1309–1338. [Google Scholar] [CrossRef]
- Rocca, E.; Schimperna, G.; Signori, A. On a Cahn–Hilliard–Keller–Segel model with generalized logistic source describing tumor growth. J. Differ. Equations 2023, 343, 530–578. [Google Scholar] [CrossRef]
- Storvik, E.; Both, J.W.; Nordbotten, J.M.; Radu, F.A. A Cahn–Hilliard–Biot system and its generalized gradient flow structure. Appl. Math. Lett. 2022, 126, 107799. [Google Scholar] [CrossRef]
- Cristini, V.; Li, X.; Lowengrub, J.S.; Wise, S.M. Nonlinear simulations of solid tumor growth using a mixture model: Invasion and branching. J. Math. Biol. 2009, 58, 723–763. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Oden, J.T.; Hawkins, A.; Prudhomme, S. General diffuse-interface theories and an approach to predictive tumor growth modeling. Math. Model. Methods Appl. Sci. 2010, 20, 477–517. [Google Scholar] [CrossRef] [Green Version]
- Chatelain, C.; Balois, T.; Ciarletta, P.; Amar, M.B. Emergence of microstructural patterns in skin cancer: A phase separation analysis in a binary mixture. New J. Phys. 2011, 13, 115013. [Google Scholar] [CrossRef]
- Frieboes, H.B.; Jin, F.; Chuang, Y.L.; Wise, S.M.; Lowengrub, J.S.; Cristini, V. Three-dimensional multispecies nonlinear tumor growth—II: Tumor invasion and angiogenesis. J. Theor. Biol. 2010, 264, 1254–1278. [Google Scholar] [CrossRef] [Green Version]
- Hawkins-Daarud, A.; Prudhomme, S.; van der Zee, K.G.; Oden, J.T. Bayesian calibration, validation, and uncertainty quantification of diffuse interface models of tumor growth. J. Math. Biol. 2013, 67, 1457–1485. [Google Scholar] [CrossRef]
- Garcke, H.; Lam, K.F. Analysis of a Cahn-Hilliard system with non-zero Dirichlet conditions modeling tumor growth with chemotaxis. Discret. Contin. Dyn. Syst. 2017, 37, 4277–4308. [Google Scholar] [CrossRef] [Green Version]
- Garcke, H.; Lam, K.F. Well-posedness of a Cahn–Hilliard system modeling tumour growth with chemotaxis and active transport. Eur. J. Appl. Math. 2017, 28, 284–316. [Google Scholar] [CrossRef] [Green Version]
- Garcke, H.; Lam, K.F.; Sitka, E.; Styles, V. A Cahn–Hilliard–Darcy model for tumour growth with chemotaxis and active transport. Math. Model. Methods Appl. Sci. 2016, 26, 1095–1148. [Google Scholar] [CrossRef]
- Kadiri, M.; Trabelsi, S. Cahn-Hilliard equation: Continuous dependence on physical parameters and sensitivity analysis. 2022; submitted. [Google Scholar]
- Kadiri, M.; Titi, E.S.; Trabelsi, S. Data assimilation for a Cahn-hilliard equations modeling tumour growth. 2022; submitted. [Google Scholar]
- Kaltenbacher, B. Some Newton-type methods for the regularization of nonlinear ill-posed problems. Inverse Probl. 1997, 13, 729–753. [Google Scholar] [CrossRef]
- Gazzola, S.; Reichel, L. A new framework formulti-parameter regularization. Bit Numer. Math. 2016, 56, 919–949. [Google Scholar] [CrossRef]
- Hansen, P.C. The L-Curve and Its Use in the Numerical Treatment of Inverse Problems; Computational Inverse Problems in Electro Cardiology; WIT Press: Southampton, UK, 1999; pp. 119–142. [Google Scholar]
- Kaltenbacher, B.; Kirchner, A.; Vexler, B. Adaptive discretizations for the choice of a Tikhonov regularization parameter in nonlinear inverse problems. Inverse Problems 2011, 27, 125008. [Google Scholar] [CrossRef]




















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kadiri, M.; Louaked, M.; Trabelsi, S. Optimal Control and Parameters Identification for the Cahn–Hilliard Equations Modeling Tumor Growth. Mathematics 2023, 11, 1607. https://doi.org/10.3390/math11071607
Kadiri M, Louaked M, Trabelsi S. Optimal Control and Parameters Identification for the Cahn–Hilliard Equations Modeling Tumor Growth. Mathematics. 2023; 11(7):1607. https://doi.org/10.3390/math11071607
Chicago/Turabian StyleKadiri, Mostafa, Mohammed Louaked, and Saber Trabelsi. 2023. "Optimal Control and Parameters Identification for the Cahn–Hilliard Equations Modeling Tumor Growth" Mathematics 11, no. 7: 1607. https://doi.org/10.3390/math11071607