
Periodically Intermittent Control of Memristor-Based Hyper-Chaotic Bao-like System

Abstract
:1. Introduction
- (i)
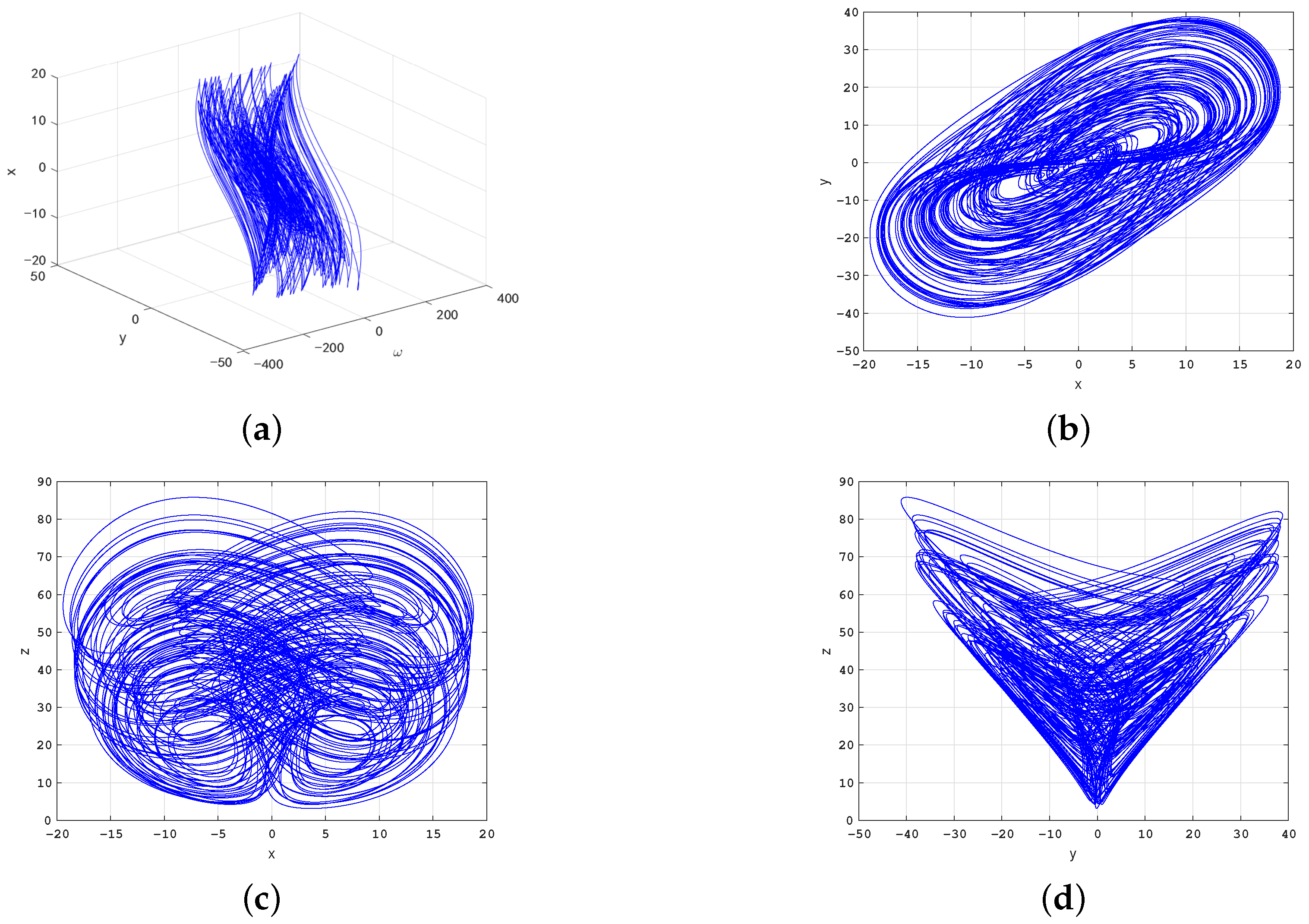
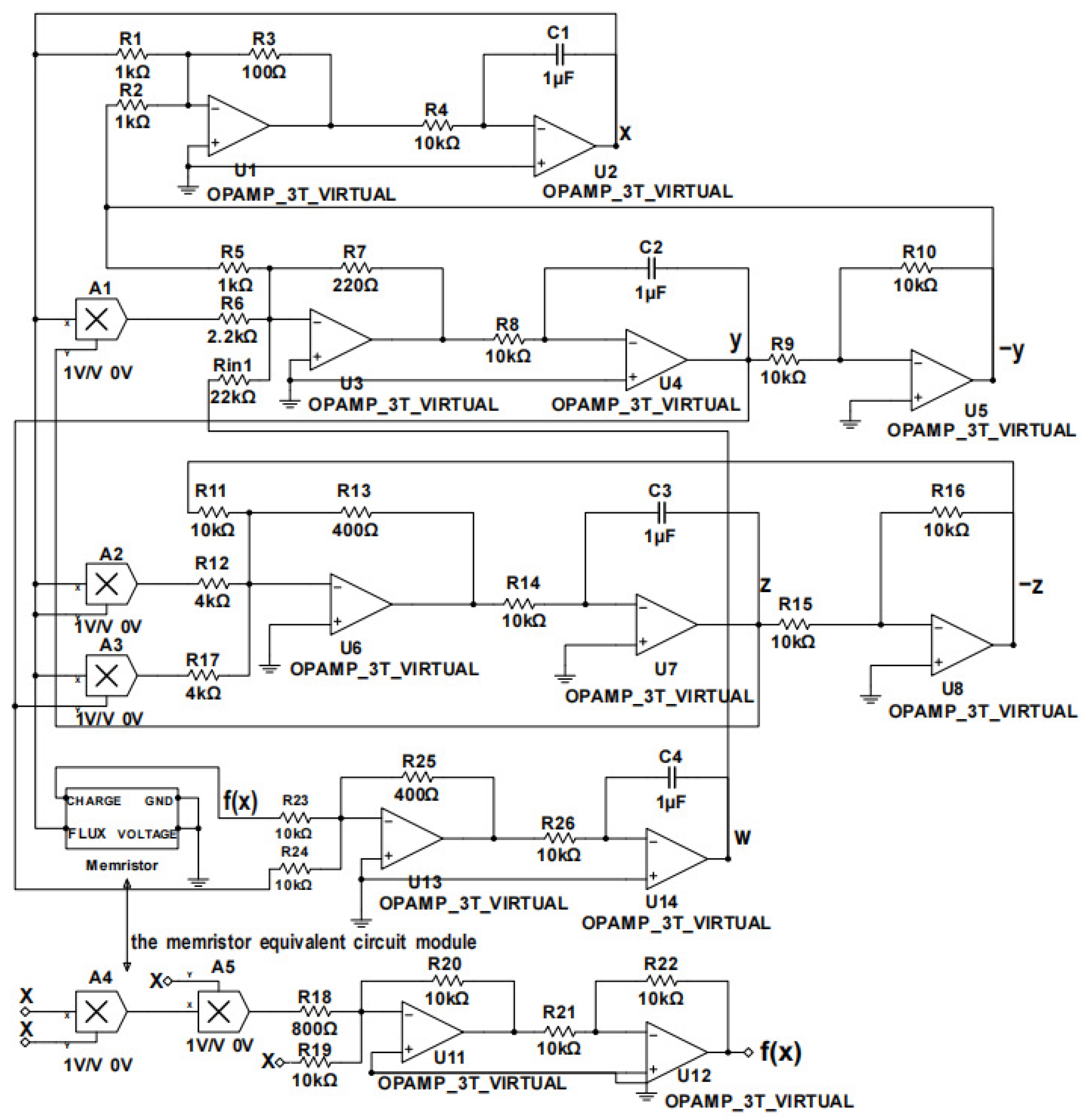
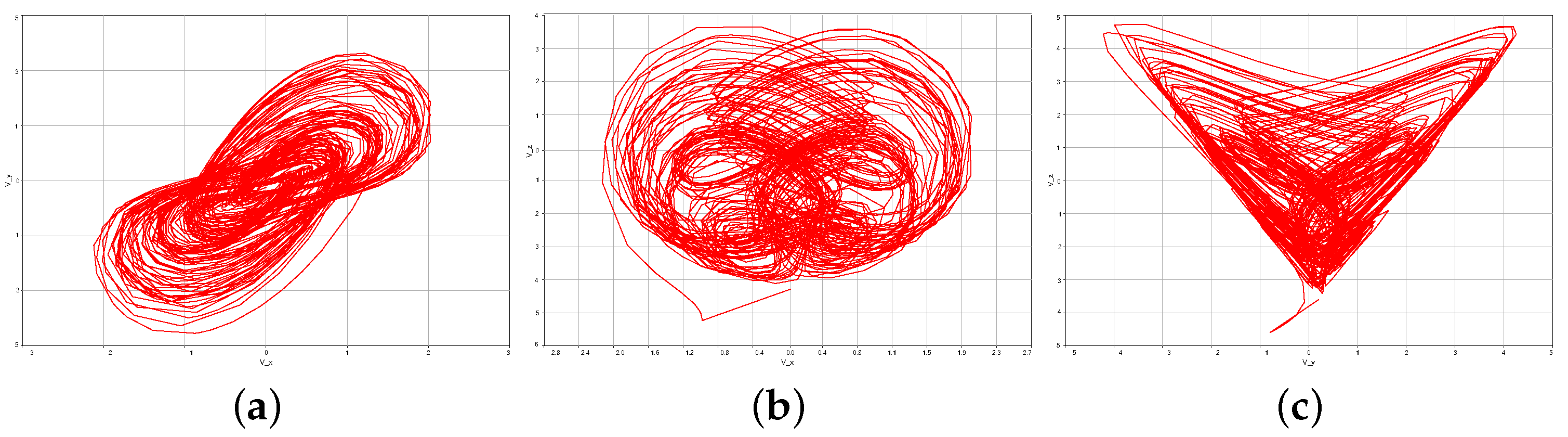
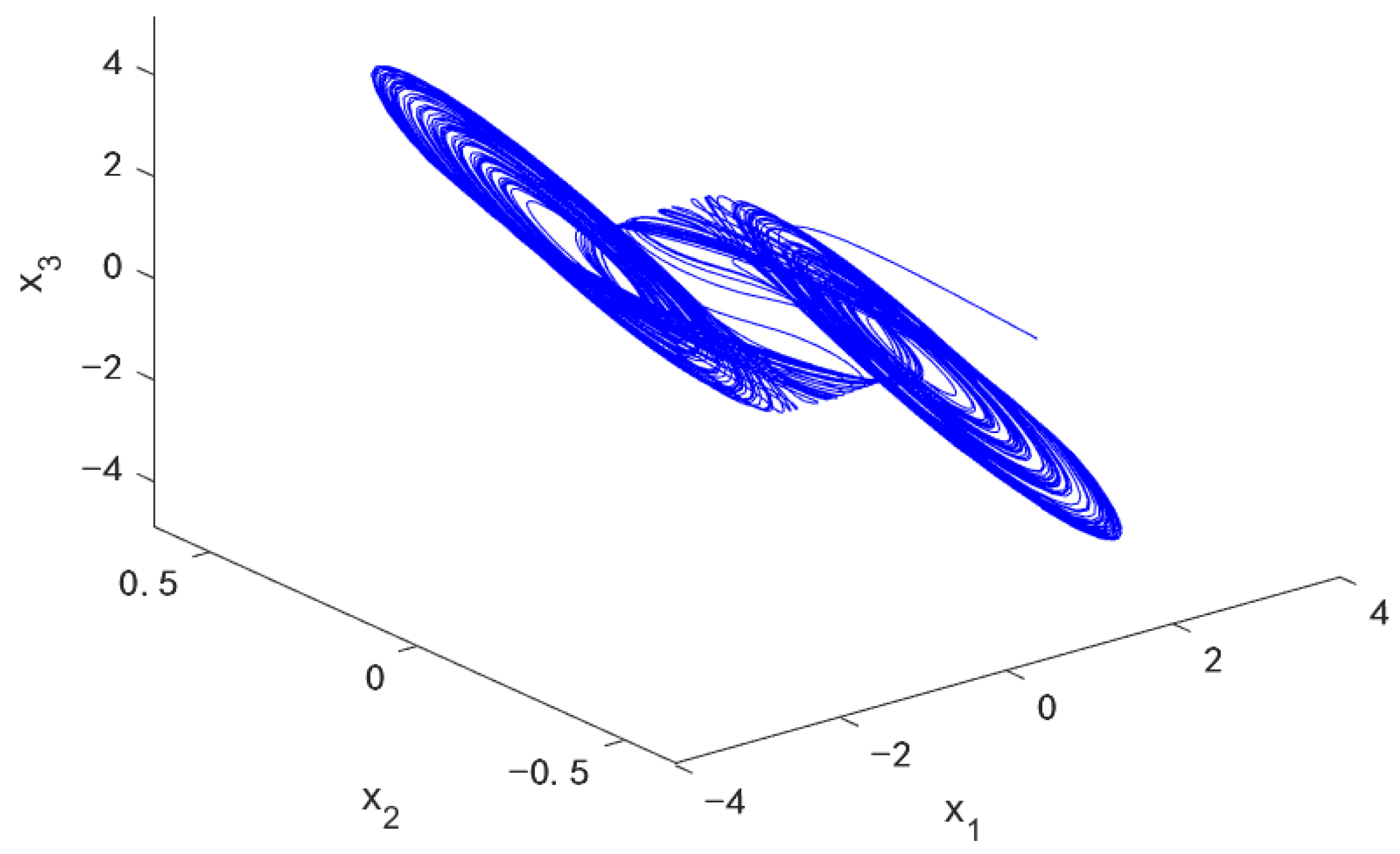
- A memristor-based hyper-chaotic Bao-like system is constructed, and its chaotic behavior is verified by designing an analog circuit;
- (ii)
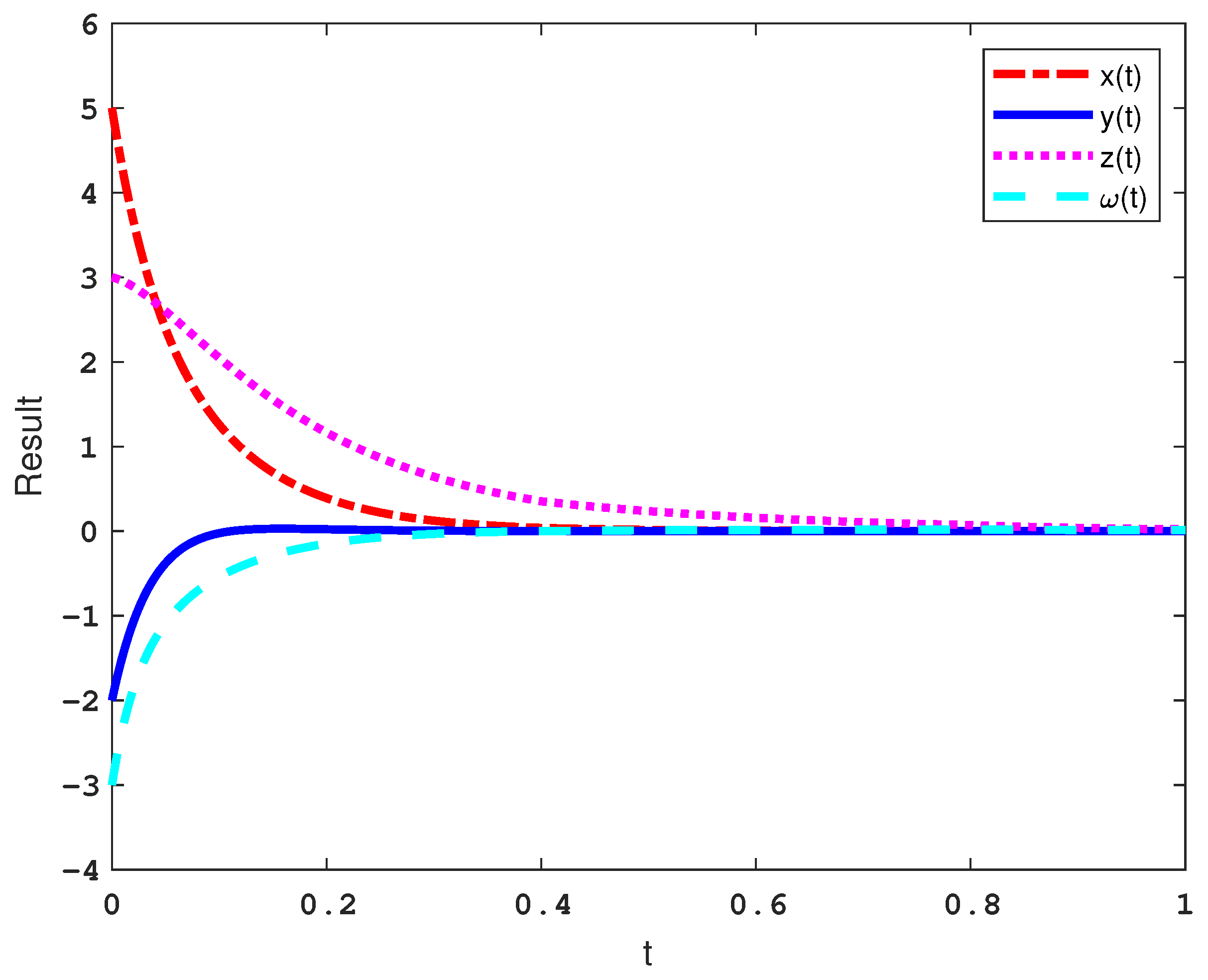
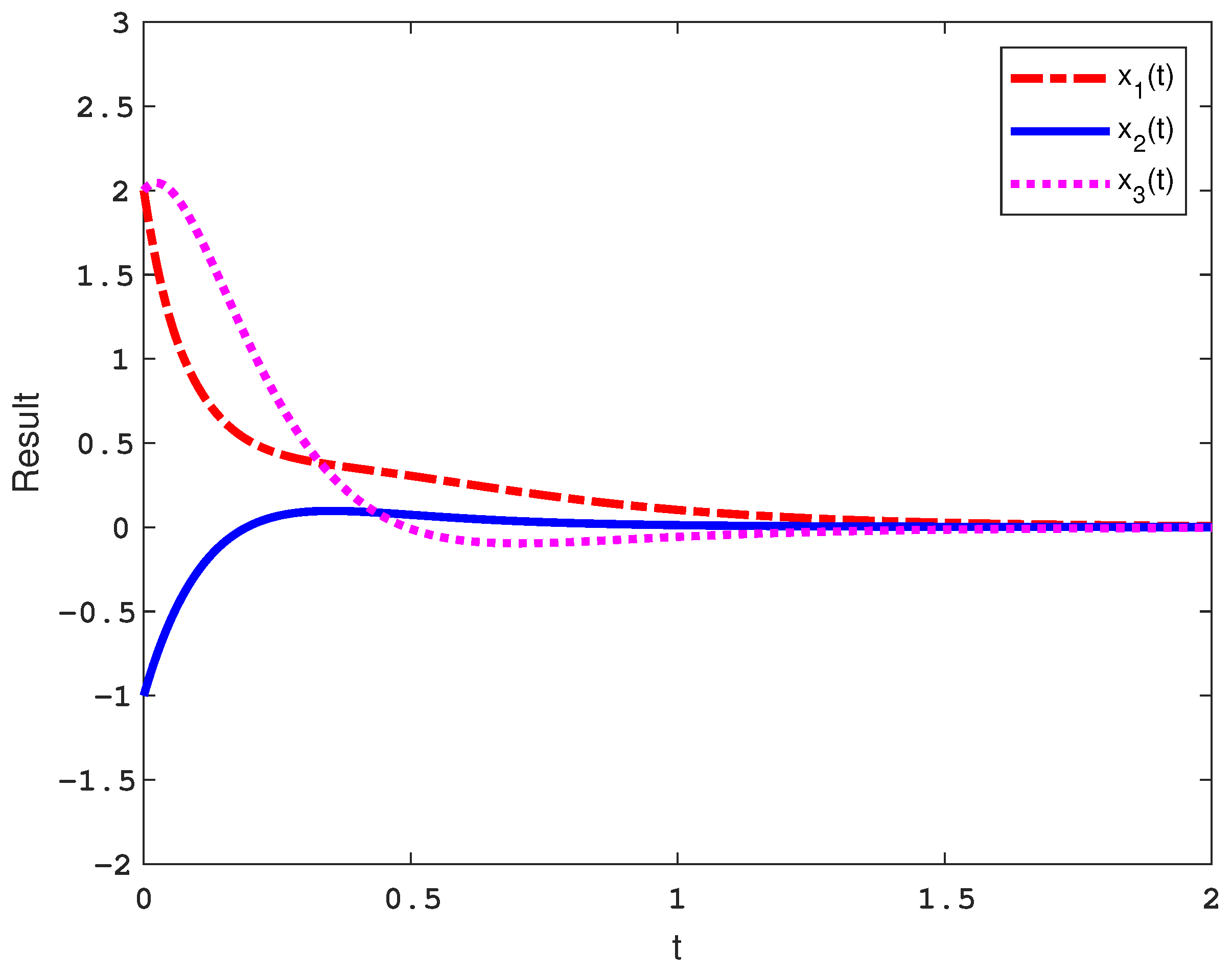
- A novel control method called periodically intermittent control with variable control width is proposed, and the proposed hyper-chaotic system is controlled by this method.
2. Construction of the New Hyper-Chaotic System
3. Introduction of the Periodically Intermittent Control
4. Main Results
- (i)
- ;
- (ii)
- ;
- (iii)
- .
5. Numerical Simulation Examples
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lorenz, E.N. Deterministic nonperiodic flow. J. Atmos. Sci. 1963, 20, 130–141. [Google Scholar] [CrossRef]
- Bao, B.; Liu, Z.; Xu, J. New chaotic system and its hyperchaos generation. J. Syst. Eng. Electron. 2009, 20, 1179–1187. [Google Scholar] [CrossRef]
- Lü, J.; Chen, G. A new chaotic attractor coined. Int. J. Bifurc. Chaos 2002, 12, 659–661. [Google Scholar] [CrossRef] [Green Version]
- Cang, S.; Qi, G.; Chen, Z. A four-wing hyper-chaotic attractor and transient chaos generated from a new 4-D quadratic autonomous system. Nonlinear Dynam. 2010, 59, 515–527. [Google Scholar] [CrossRef]
- Cang, S.; Chen, Z.; Wu, W. Circuit implementation and multiform intermittency in a hyper-chaotic model extended from the Lorenz system. Chin. Phys. B 2009, 18, 1792–1800. [Google Scholar] [CrossRef]
- Chua, L.O. Memristor-the missing circuit element. IEEE Trans. Circuit Theory 1971, 18, 507–519. [Google Scholar] [CrossRef]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 459, 80–83. [Google Scholar] [CrossRef] [PubMed]
- Sahin, M.E.; Taskiran, Z.G.; Guler, H.; Hamamci, S.E. Simulation and implementation of memristive chaotic system and its application for communication systems. Sens. Actuators A Phys. 2019, 290, 107–118. [Google Scholar] [CrossRef]
- Borghetti, J.; Snider, S.G.; Kuekes, P.J.; Yang, J.J.; Stewart, D.R.; Williams, S.R. ‘Memristive’ switches enable ‘stateful’ logic operations via material implication. Nature 2010, 464, 873–876. [Google Scholar] [CrossRef] [PubMed]
- Pershin, Y.V.; Massimiliano, D.V. Experimental demonstration of associative memory with memristive neural networks. Neural Netw. 2010, 23, 881–886. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pershin, Y.V.; Steven, L.F.; Massimiliano, D.V. Memristive model of amoeba learning. Phys. Rev. E 2009, 42, 021926. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Driscoll, T.; Pershin, Y.V.; Basov, D.N.; Di Ventra, M. Chaotic memristor. Appl. Phys. A 2011, 102, 885–889. [Google Scholar] [CrossRef] [Green Version]
- Ostrovskii, V.; Fedoseev, P.; Bobrova, Y.L.; Butusov, D. Structural and parametric identification of knowm memristors. Nanomaterials 2022, 12, 63. [Google Scholar] [CrossRef] [PubMed]
- Itoh, M.; Chua, L.O. Memristor oscillators. Int. J. Bifurc. Chaos 2008, 13, 3183–3206. [Google Scholar] [CrossRef]
- Min, G.; Wang, L.; Duan, S. A novel four-dimensional memristive hyperchaotic system with its analog circuit implementation. In Proceedings of the 12th International Symposium on Neural Networks, Jeju, Republic of Korea, 15–18 October 2015; pp. 157–165. [Google Scholar] [CrossRef]
- Muthuswamy, B. Implementing memristor based chaotic circuits. Int. J. Bifurc. Chaos 2010, 20, 1335–1350. [Google Scholar] [CrossRef]
- Xie, X.; Wen, S.; Feng, Y.; Onasanya, B.O. Three-stage-impulse control of memristor-based chen hyper-chaotic system. Mathematics 2022, 10, 4560. [Google Scholar] [CrossRef]
- Yang, X.; Yang, Z.; Nie, X. Exponential synchronization of discontinuous chaotic systems via delayed impulsive control and its application to secure communication. Commun. Nonlinear Sci. 2014, 19, 1529–1543. [Google Scholar] [CrossRef]
- Rao, R.; Lin, Z.; Ai, X.; Wu, J. Synchronization of epidemic systems with neumann boundary value under delayed impulse. Mathematics 2020, 10, 2064. [Google Scholar] [CrossRef]
- Wu, K.; Onasanya, B.O.; Cao, L.; Feng, Y. Impulsive control of some types of nonlinear systems using a set of uncertain control matrices. Mathematics 2023, 11, 421. [Google Scholar] [CrossRef]
- Chen, H.; Chen, J.; Qu, D.; Li, K.; Lou, F. An uncertain sandwich impulsive control system with impulsive time windows. Mathematics 2022, 10, 4708. [Google Scholar] [CrossRef]
- Liao, C.; Tu, D.; Feng, Y.; Zhang, W.; Wang, Z.; Onasanya, B.O. A sandwich control system with dual stochastic impulses. IEEE/CAA J. Autom. Sin. 2022, 4, 741–744. [Google Scholar] [CrossRef]
- Li, C.; Feng, G.; Lia, X. Stabilization of nonlinear systems via periodically intermittent control. IEEE Trans. Circuits Syst. 2007, 54, 1019–1023. [Google Scholar] [CrossRef]
- Li, C.; Liao, X.; Huang, T. Exponential stabilization of chaotic systems with delay by periodically intermittent contro. Chaos 2007, 17, 013103. [Google Scholar] [CrossRef]
- Ding, K.; Zhu, Q. Intermittent extended dissipative control for delayed distributed parameter systems with stochastic disturbance: A spatial point sampling approach. IEEE Trans. Fuzzy Syst. 2020, 30, 1734–1749. [Google Scholar] [CrossRef]
- Ding, K.; Zhu, Q.; Li, H. A generalized system approach to intermittent nonfragile control of stochastic neutral time-varying delay systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 7017–7026. [Google Scholar] [CrossRef]
- Liu, B.; Liu, T.; Xiao, P. Dynamic event-triggered intermittent control for stabilization of delayed dynamical systems. Automatica 2023, 149, 110847. [Google Scholar] [CrossRef]
- Zhou, H.; Chen, Y.; Chu, D.; Li, W. Impulsive stabilization of complex-valued stochastic complex networks via periodic self-triggered intermittent control. Nonlinear Anal. Hybrid Syst. 2023, 48, 101304. [Google Scholar] [CrossRef]
- Zhang, Z.; He, Y.; Zhang, Y.; Wu, M. Exponential stabilization of neural networks with time-varying delay by periodically intermittent control. Neurocomputing 2016, 207, 469–475. [Google Scholar] [CrossRef]
- Wang, Q.; He, Y.; Tan, G.; Wu, M. Observer-based periodically intermittent control for linear systems via piecewise Lyapunov function method. Appl. Math. Comput. 2017, 293, 438–447. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; He, Y. Fuzzy synchronization of chaotic systems via intermittent control. Chaos 2018, 106, 154–160. [Google Scholar] [CrossRef]
- You, L.; Yang, X.; Wu, S.; Li, X. Finite-time stabilization for uncertain nonlinear systems with impulsive disturbance via aperiodic intermittent control. Appl. Math. Comput. 2023, 443, 127782. [Google Scholar] [CrossRef]
- Xu, C.; Tong, D.; Chen, Q.; Zhou, W.; Xu, Y. Exponential synchronization of chaotic systems with stochastic noise via periodically intermittent control. Int. J. Robust Nonlinear Control 2020, 30, 2611–2624. [Google Scholar] [CrossRef]
- Yang, X.; Feng, Y.; Yiu, K.F.C.; Song, Q.; Alsaadi, F.E. Synchronization of coupled neural networks with infinite-time distributed delays via quantized intermittent pinning control. Nonlinear Dynam. 2018, 94, 2289–2303. [Google Scholar] [CrossRef]
- Ding, K.; Zhu, Q.; Huang, T. Prefixed-time local intermittent sampling synchronization of stochastic multicoupling delay reaction-diffusion dynamic networks. IEEE Trans. Neural Netw. Learn. Syst. 2022, 16, 1–15. [Google Scholar] [CrossRef]
- Gabelli, J.; Fve, G.; Berroir, B.; Etienne, B.; Glattli, D. Violation of Kirchhoff’s Laws for a Coherent RC Circuit. Science 2006, 313, 499–502. [Google Scholar] [CrossRef] [Green Version]
- Bao, B.; Liu, Z.; Xu, T. Steady periodic memristor oscillator with transient chaotic behaviours. Electron. Lett. 2010, 46, 237–238. [Google Scholar] [CrossRef]
- Wolf, A.; Swift, J.B.; Swinney, H.L.; Vastano, J.A. Determining Lyapunov exponents from a time series. Physica D 1985, 16, 285–317. [Google Scholar] [CrossRef] [Green Version]
- Shaw, R. Strange attractors, chaotic behavior, and information flow. Z. Naturforsch. A 1981, 36, 80–112. [Google Scholar] [CrossRef]
- Frederickson, P.; Kaplan, J.L.; Yorke, E.D.; Yorke, J.A. The Liapunov dimension of strange attractors. J. Differ. Equ. 1983, 49, 185–207. [Google Scholar] [CrossRef] [Green Version]
- Sanchez, E.N.; Perez, J.P. Input-to-state stability (ISS) analysis for dynamic neural networks. IEEE Trans. Circuits Syst. 1999, 46, 1395–1398. [Google Scholar] [CrossRef]
- Boyd, S.; Ghaoui, L.; Feron, E.E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory. Chaos Soliton Fractals 1994, 15, 157–193. [Google Scholar] [CrossRef]
- Shil’nikov, L.P. Chua’s circuit: Rigorous results and future problems. Int. J. Bifurc. Chaos 1994, 4, 489–519. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | ||||
|---|---|---|---|---|
| 8.6789 | 2.9300 | −3.8563 | −23.7506 | |
| 7.1126 | −1.2834 | −0.0935 | −21.7304 | |
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| 0.4827 | 0.1783 | −0.0079 | −16.3812 | |
| 0.5369 | 0.1863 | −0.0077 | −16.4081 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, K.; Li, R.; Cao, L.; Feng, Y.; Onasanya, B.O. Periodically Intermittent Control of Memristor-Based Hyper-Chaotic Bao-like System. Mathematics 2023, 11, 1264. https://doi.org/10.3390/math11051264
Li K, Li R, Cao L, Feng Y, Onasanya BO. Periodically Intermittent Control of Memristor-Based Hyper-Chaotic Bao-like System. Mathematics. 2023; 11(5):1264. https://doi.org/10.3390/math11051264
Chicago/Turabian StyleLi, Kun, Rongfeng Li, Longzhou Cao, Yuming Feng, and Babatunde Oluwaseun Onasanya. 2023. "Periodically Intermittent Control of Memristor-Based Hyper-Chaotic Bao-like System" Mathematics 11, no. 5: 1264. https://doi.org/10.3390/math11051264