
Brushless Operation of Wound-Rotor Synchronous Machine Based on Sub-Harmonic Excitation Technique Using Multi-Pole Stator Windings

Abstract
:1. Introduction
2. Machine Topologies and Operating Principle
2.1. Reference Machine with Multi-Pole Winding
2.2. Proposed Machine with Multi-Pole Winding
3. FEM Analysis
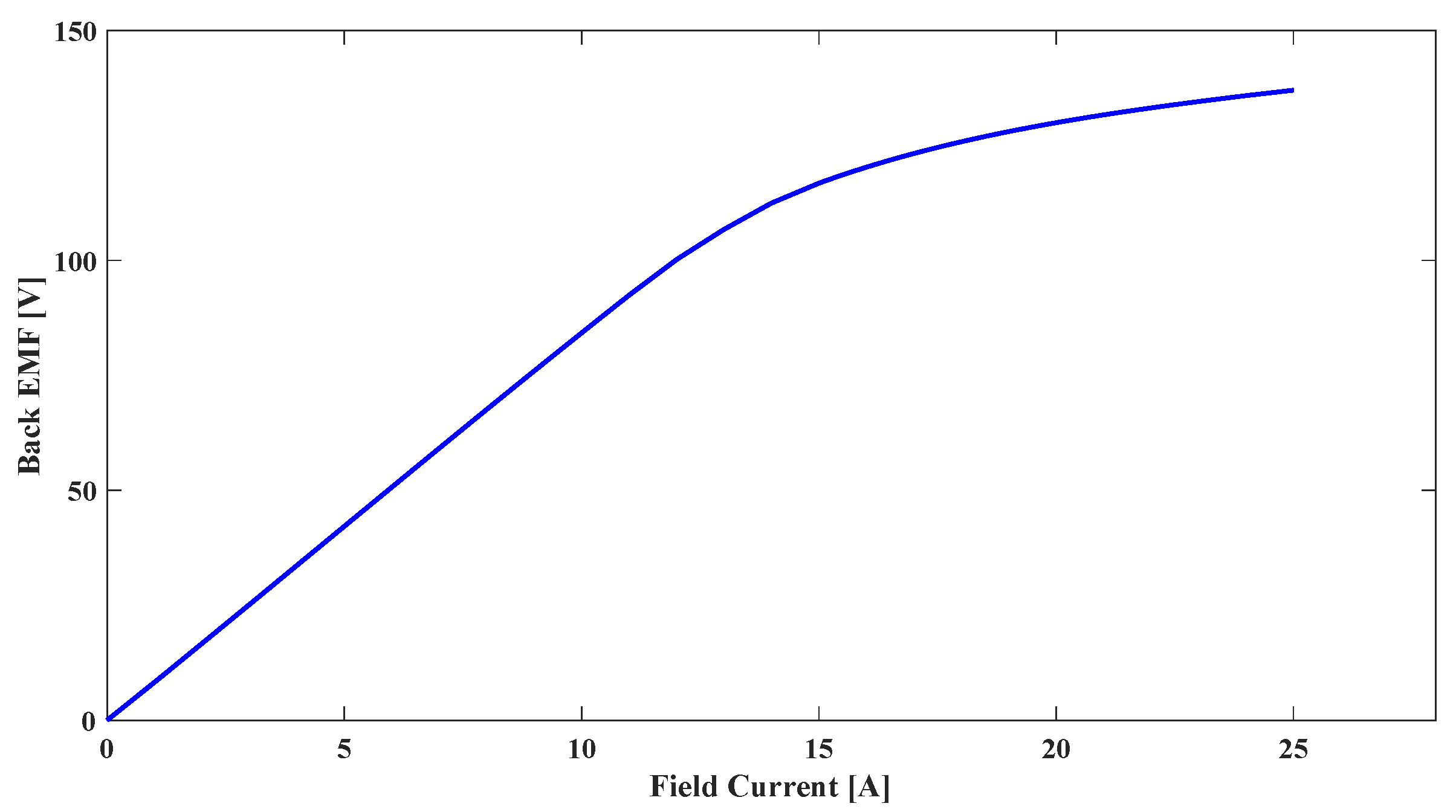
3.1. No Load Analysis
3.2. Load Analysis
3.2.1. Flux Density
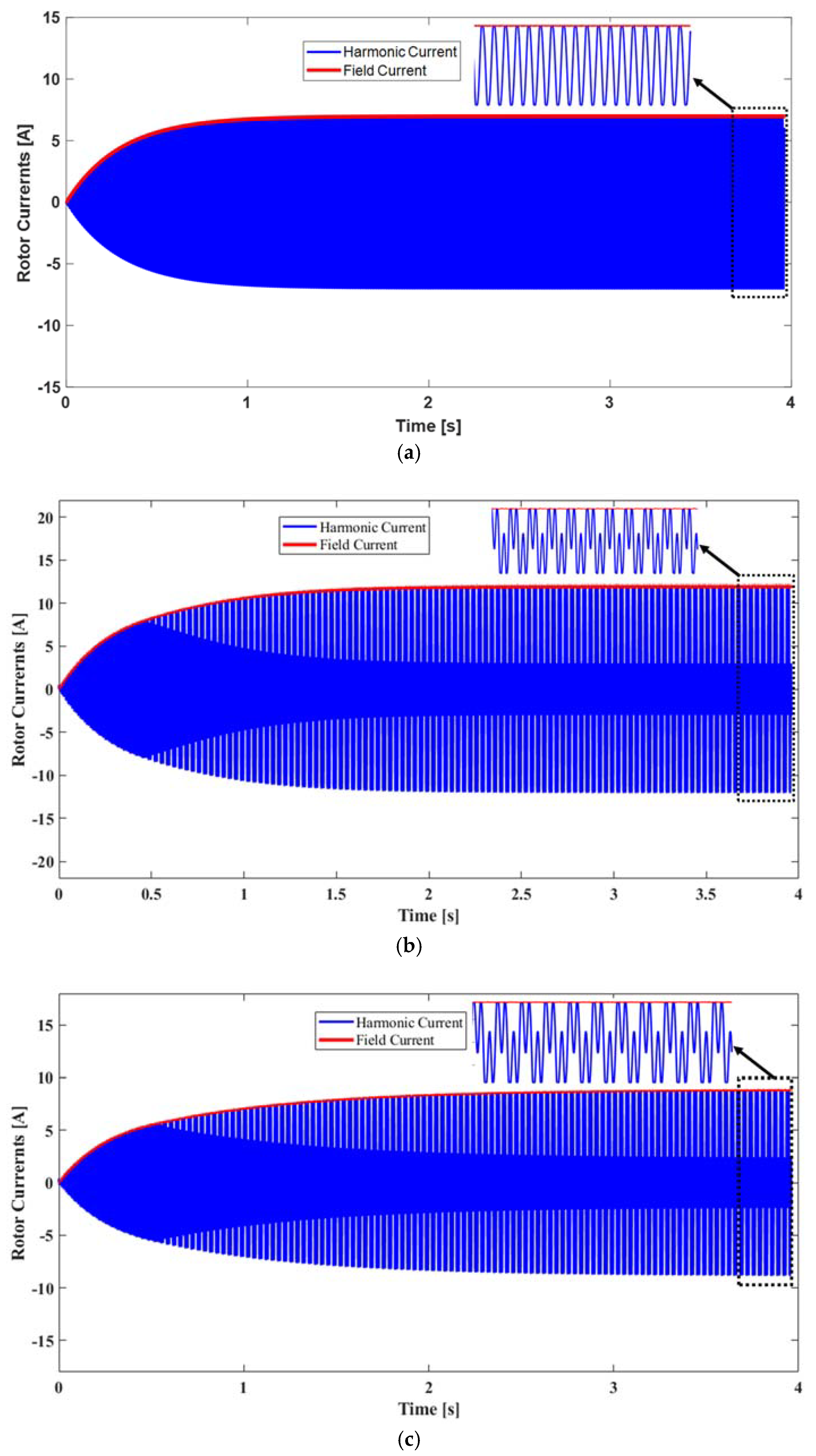
3.2.2. Rotor Currents
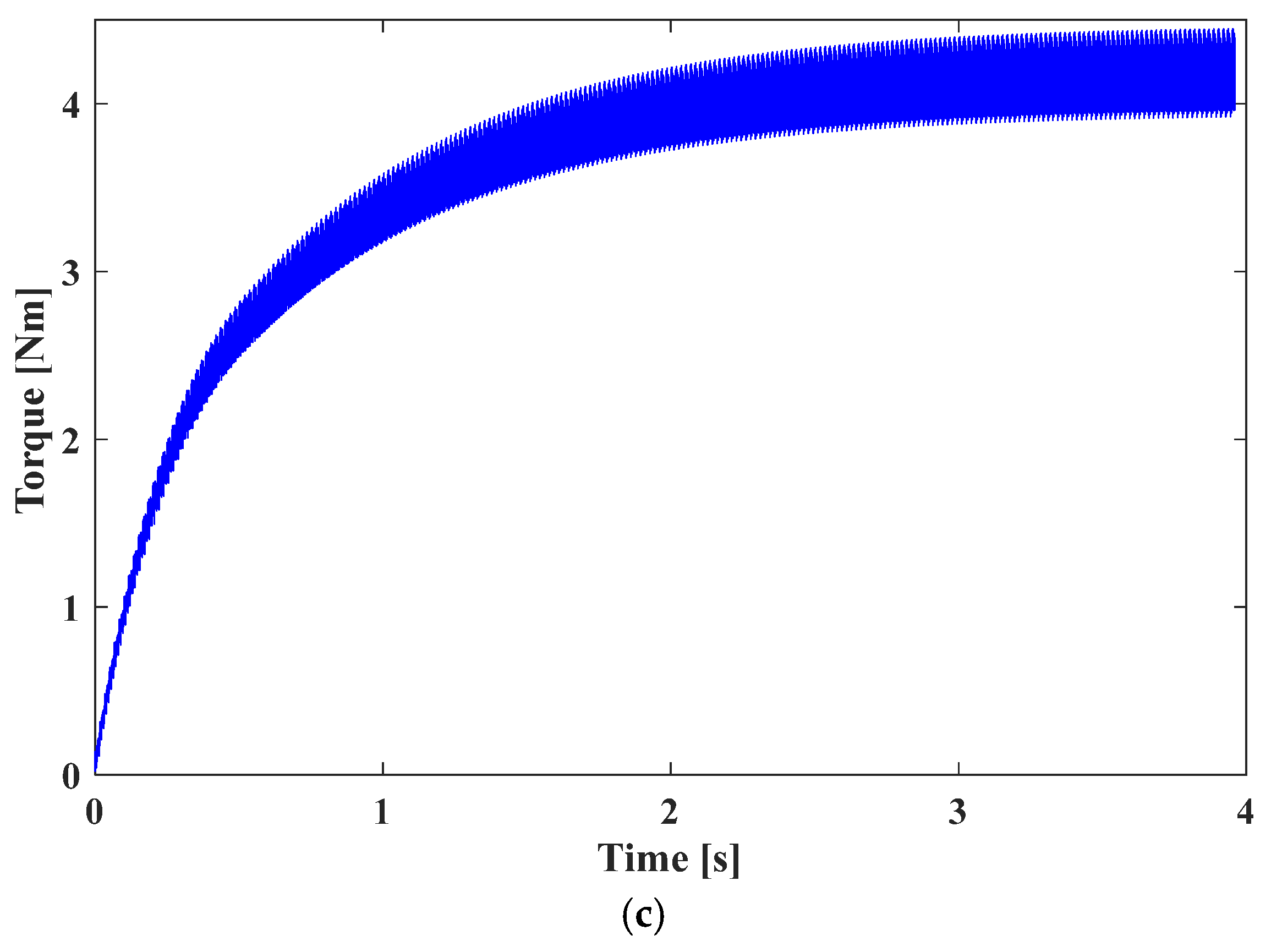
3.2.3. Torque
3.2.4. Power Losses and Efficiency
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| FEM | Finite element analysis |
| MMF function for the given winding | |
| f | input supply frequency |
| h | harmonics |
| INV1φ | single phase inverter |
| INV3φ | three phase inverter |
| Im | magnitude of current |
| MMF | magnetomotive force |
| N4P | number of turns per phase of 4P-winding |
| N2P | number of turns per phase of 2P-winding |
| winding function | |
| ns(h) | rotating speed of harmonic |
| p | pole pairs |
| t | time |
| angular frequency |
References
- Sun, L.; Gao, X.; Yao, F.; An, Q.; Lipo, T. A new type of harmonic current excited brushless synchronous machine based on an open winding pattern. In Proceedings of the 2014 IEEE Energy Conversion Congress and Exposition (ECCE), Pittsburgh, PA, USA, 14–18 September 2014; pp. 2366–2373. [Google Scholar] [CrossRef]
- Du, Z.S.; Lipo, T.A. Efficient Utilization of Rare Earth Permanent-Magnet Materials and Torque Ripple Reduction in Interior Permanent-Magnet Machines. IEEE Trans. Ind. Appl. 2017, 53, 3485–3495. [Google Scholar] [CrossRef]
- Barcaro, M.; Bianchi, N. Interior PM Machines Using Ferrite to Replace Rare-Earth Surface PM Machines. IEEE Trans. Ind. Appl. 2013, 50, 979–985. [Google Scholar] [CrossRef]
- Barcaro, M.; Bianchi, N.; Magnussen, F. Permanent-Magnet Optimization in Permanent-Magnet-Assisted Synchronous Reluctance Motor for a Wide Constant-Power Speed Range. IEEE Trans. Ind. Electron. 2012, 59, 2495–2502. [Google Scholar] [CrossRef]
- Guglielmi, P.; Boazzo, B.; Armando, E.; Pellegrino, G.; Vagati, A. Permanent-Magnet Minimization in PM-Assisted Synchronous Reluctance Motors for Wide Speed Range. IEEE Trans. Ind. Appl. 2013, 49, 31–41. [Google Scholar] [CrossRef] [Green Version]
- Hussain, A.; Atiq, S.; Kwon, B.-I. Consequent-Pole Hybrid Brushless Wound-Rotor Synchronous Machine. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Amara, Y.; Vido, L.; Gabsi, M.; Hoang, E.; Ben Ahmed, A.H.; Lecrivain, M. Hybrid Excitation Synchronous Machines: Energy-Efficient Solution for Vehicles Propulsion. IEEE Trans. Veh. Technol. 2009, 58, 2137–2149. [Google Scholar] [CrossRef]
- Shushu, Z.; Chuang, L.; Yinhang, N.; Jie, T. A Two-Stage Brushless Excitation Method for Hybrid Excitation Synchronous Generator. IEEE Trans. Magn. 2015, 51, 1–11. [Google Scholar] [CrossRef]
- Lipo, T.A.; Du, Z.S. Synchronous motor drives-a forgotten option. In Proceedings of the 2015 Intl Aegean Conference on Electrical Machines & Power Electronics (ACEMP), 2015 Intl Conference on Optimization of Electrical & Electronic Equipment (OPTIM) & 2015 Intl Symposium on Advanced Electromechanical Motion Systems (electromotion), Side, Turkey, 2–4 September 2015; IEEE: New York, NY, USA, 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Hussain, A.; Baig, Z.; Toor, W.T.; Ali, U.; Idrees, M.; Al Shloul, T.; Ghadi, Y.Y.; Alkahtani, H.K. Wound Rotor Synchronous Motor as Promising Solution for Traction Applications. Electronics 2022, 11, 4116. [Google Scholar] [CrossRef]
- Mi, C.; Filippa, M.; Shen, J.; Natarajan, N. Modeling and Control of a Variable-Speed Constant-Frequency Synchronous Generator With Brushless Exciter. IEEE Trans. Ind. Appl. 2004, 40, 565–573. [Google Scholar] [CrossRef]
- Aliprantis, D.C.; Sudhoff, S.D.; Kuhn, B.T. Genetic algorithm-based parameter identification of a hysteretic brushless exciter model. IEEE Trans. Energy Convers. 2006, 21, 148–154. [Google Scholar] [CrossRef]
- Ali, Q.; Lipo, T.A.; Kwon, B.-I. Design and Analysis of a Novel Brushless Wound Rotor Synchronous Machine. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Ali, Q.; Bukhari, S.S.H.; Atiq, S. Variable-speed, sub-harmonically excited BL-WRSM avoiding unbalanced radial force. Electr. Eng. 2019, 101, 251–257. [Google Scholar] [CrossRef]
- Hussain, A.; Atiq, S.; Kwon, B.-I. Optimal Design and Experimental Verification of Wound Rotor Synchronous Machine Using Subharmonic Excitation for Brushless Operation. Energies 2018, 11, 554. [Google Scholar] [CrossRef] [Green Version]
- Gurakuq, D.; Dieter, G. New Self-Excited Synchronous Machine with Tooth Concentrated Winding. In Proceedings of the 3rd International Electric Drives Production Conference (EDPC-2013), Erlangen-Nürnberg, Germany, 29–30 October 2013. [Google Scholar]
- Bukhari, S.; Mangi, F.; Sami, I.; Ali, Q.; Ro, J.-S. High-Harmonic Injection-Based Brushless Wound Field Synchronous Machine Topology. Mathematics 2021, 9, 1721. [Google Scholar] [CrossRef]
- Ayub, M.; Sirewal, G.J.; Bukhari, S.S.H.; Kwon, B.-I. Brushless wound rotor synchronous machine with third-harmonic field excitation. Electr. Eng. 2019, 102, 259–265. [Google Scholar] [CrossRef]
- Bukhari, S.S.H.; Sirewal, G.J.; Chachar, F.A.; Ro, J.-S. Dual-Inverter-Controlled Brushless Operation of Wound Rotor Synchronous Machines Based on an Open-Winding Pattern. Energies 2020, 13, 2205. [Google Scholar] [CrossRef]
- Bukhari, S.; Memon, A.; Madanzadeh, S.; Sirewal, G.; Doval-Gandoy, J.; Ro, J.-S. Novel Single Inverter-Controlled Brushless Wound Field Synchronous Machine Topology. Mathematics 2021, 9, 1739. [Google Scholar] [CrossRef]
- Bukhari, S.; Ali, Q.; Doval-Gandoy, J.; Ro, J.-S. High-Efficient Brushless Wound Rotor Synchronous Machine Topology Based on Sub-Harmonic Field-Excitation Technique. Energies 2021, 14, 4427. [Google Scholar] [CrossRef]
- Rafin, S.M.S.H.; Ali, Q.; Khan, S.; Lipo, T.A. A novel two-layer winding topology for sub-harmonic synchronous machines. Electr. Eng. 2022, 104, 3027–3035. [Google Scholar] [CrossRef]
- Rafin, S.M.S.H.; Ali, Q.; Lipo, T.A. A Novel Sub-Harmonic Synchronous Machine Using Three-Layer Winding Topology. World Electr. Veh. J. 2022, 13, 16. [Google Scholar] [CrossRef]
- Avon, G.; Bucolo, M.; Buscarino, A.; Fortuna, L. Sensing Frequency Drifts: A Lookup Table Approach. IEEE Access 2022, 10, 96249–96259. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Units | Values |
|---|---|---|
| Speed | rpm | 1800 |
| Rated power | W | 880 |
| Stator outer diameter | mm | 152 |
| Rotor outer diameter | mm | 94 |
| Stack length | mm | 120 |
| Air gap length | mm | 0.5 |
| Number of stator slots | - | 24 |
| Number of rotor slots | - | 04 |
| Stator winding pols | - | 02/04 |
| Rotor excitation/field winding pols | - | 02/04 |
| Stator’s No of turns/phase | - | 102 |
| E-Winding total turns | - | 24 |
| F-Winding total turns | - | 248 |
| Parameters | Units | Reference Machine | Proposed Machine | |
|---|---|---|---|---|
| Case 1 | Case 2 | |||
| Input current to 4P-winding | Apk | 5 | 5 | 5 |
| Input current to 2P-winding | Apk | 5 | 5 | 3.5 |
| Excitation winding current | Arms | 5.34 | 8.32 | 6.17 |
| Field winding current | ADC | 7.00 | 11.94 | 8.76 |
| Maximum Flux density | T | 1.29 | 1.62 | 1.37 |
| Core losses | W | 14.49 | 31.81 | 18.69 |
| I2R losses | W | 47.96 | 112.61 | 65.2 |
| Torque | Nm | 4.20 | 5.55 | 4.22 |
| Torque ripples | % | 11.84 | 16.10 | 12.67 |
| Efficiency | % | 92.69 | 87.81 | 90.37 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Humza, M.; Yazdan, T.; Ali, Q.; Cho, H.-W. Brushless Operation of Wound-Rotor Synchronous Machine Based on Sub-Harmonic Excitation Technique Using Multi-Pole Stator Windings. Mathematics 2023, 11, 1117. https://doi.org/10.3390/math11051117
Humza M, Yazdan T, Ali Q, Cho H-W. Brushless Operation of Wound-Rotor Synchronous Machine Based on Sub-Harmonic Excitation Technique Using Multi-Pole Stator Windings. Mathematics. 2023; 11(5):1117. https://doi.org/10.3390/math11051117
Chicago/Turabian StyleHumza, Muhammad, Tanveer Yazdan, Qasim Ali, and Han-Wook Cho. 2023. "Brushless Operation of Wound-Rotor Synchronous Machine Based on Sub-Harmonic Excitation Technique Using Multi-Pole Stator Windings" Mathematics 11, no. 5: 1117. https://doi.org/10.3390/math11051117