1. Introduction
Physical problems can be distilled into partial/ordinary differential equations and explored with numerical simulation methods. After decades of development, mesh-free methods have become an inevitable part of simulation-based engineering science (SBES) [
1] because of the independence of mesh. For example, the smoothed particle hydrodynamics (SPH) [
2], the diffuse element method (DEM) [
3], the element-free Galerkin (EFG) [
4], and the reproducing kernel particle method (RKPM) [
5] are relatively prominent and popularly employed. However, these mesh-free methods are much less competitive than mesh-dependent methods due to computationally expensive neighbor searching and field approximation.
To pursue efficiency and usability, Sulsky et al. proposed a hybrid particle/grid method, called the material point method (MPM) [
6,
7,
8], with inspiration from the particle-in-cell method (PIC) [
9] and the fluid-implicit-particle method (FLIP) [
10]. The MPM consists of a collection of Lagrangian particles and a Eulerian background grid. The particles represent continuum bodies, each carrying material information, such as mass, velocity, and stress. Unlike the SPH or the EFG, field approximation within the MPM is designed independently of particles, thus avoiding neighbor searching. Instead, particle information is first transferred to a Eulerian background grid, and then the grid temporally pushes the motion evolvement forward with physical conservation laws. Later, updated motion is projected back to the particles for evolving deformation. This design has proven to be very effective and successful in solving complex engineering problems with large deformations, multi-phase interactions, and history-dependent material behavior [
11].
As for the information transfer between particles and the grid, the piecewise-linear Lagrange basis with
continuity is used in the classic MPM. When particles cross grid nodes at which derivatives are intermittent, stress oscillation occurs. This kind of noise is non-physical but numerical, so it hampers the spatial convergence of MPM. Since the noticeof the cell crossing error [
12], extra attention has been paid to the transfer aspect, and several improvements were proposed. For example, Bardenhagen et al. [
13] proposed the generalized interpolation material point method (GIMP), which adopts a general particle characteristic function for weak-form discretization instead of the classic Dirac delta function. According to the update mode of characteristic functions, the GIMP was further divided into the uniform GIMP (uGIMP) and the contiguous particle GIMP (cpGIMP), followed by convected particle domain interpolation (CPDI) [
14]. Unlike the GIMP methods, Steffen et al. [
15] retained the Dirac delta function but replaced the piecewise-linear basis with non-negative quadratic B-spline shape functions, which was called the BSMPM. This small change significantly reduces the numerical error. Because higher-degree B-splines yield smoother field approximation, cubic and quadric B-spline formations were later used to deal with high-demanding simulation. Furthermore, Hu et al. [
16] studied the moving least-squares approximation and proposed the MLSMPM. In addition, much work has been done on the information transfer aspect of the MPM [
17,
18,
19,
20].
Although the abovementioned work enhanced the accuracy and stability of the MPM to some extent, some numerical aspects were weakened simultaneously. On the one hand, an enlarged support domain size is beneficial for field approximation but disadvantageous for efficiency, e.g., the BSMPM variants. Specifically, the broader support domain causes higher computational costs for particle-to-grid and grid-to-particle transfer, especially in three-dimensional (3D) problems. This hinders the efficiency of large-scale simulations. A wider stencil also diffuses subtle local effects, such as collision and contact, which are of concern in mesoscale problems. On the other hand, shape functions with a small support domain tend to face graver numerical fracture issues in significant deformation problems. For these reasons, research is still needed to facilitate the MPM with more options for field approximation.
In this paper, a new shape function scheme for the MPM is proposed, which is comprised of Bernstein functions, smoothing, and aggregation. In detail, the Bernstein polynomials are smoothed with a convolution reformation to eliminate the cell crossing error, and an aggregation strategy is implemented to cut down the node amount required for field probing. With choices of original Bernstein polynomials and degrees of smoothing, hierarchical MPM variants are obtained, which can be called the ‘ASBMPM’ based on the acronyms of three key components.
The rest of this paper is organized as follows. The classic material point method theory is briefly reviewed in
Section 2. The basic requirements of shape functions are introduced in
Section 3.1, and the Bernstein polynomials, the newly proposed smoothing, and the aggregation strategy are described in
Section 3.2,
Section 3.3 and
Section 3.4. Explicit formulas of the aggregated and smoothed Bernstein functions are further provided in
Section 4. Numerical validation and investigation with two classic problems are completed in
Section 5. Finally, the conclusion of this paper is given in
Section 6.
2. The Material Point Method
The material point method (MPM) is a hybrid Lagrangian/Eulerian method [
21]. Continuum bodies are discretized into Lagrangian particles, which carry mass, velocity, stress, and other necessary physical state information. The Eulerian background grid covers possible motion footprints of particles and temporally pushes forward the evolvement of deformation with conservation laws.
For the deformation gradients (updating strain) being estimated on the background grid, there is no need for a connected Lagrangian mesh as the finite element method (FEM). In addition, the background grid acts as a middleware between particles, eliminating particle searching and particle–particle interactions. Although not directly derived from the mesh-free theory, the MPM falls within a general class of mesh-free methods, since it has many similar aspects to other mesh-free methods [
22].
2.1. Governing Equations
The conservations of interest for mechanical problems are mass and momentum. Since the updated Lagrangian framework is usually used to handle the physical system of MPM, it is more convenient to demonstrate the conservation laws in the current configuration.
In this way, the conservation of mass and the conservation of momentum are given by:
and
where
denotes the material derivative;
is the mass density;
is the specific external body force;
is the Cauchy stress.
In addition to the conservation laws, boundary conditions are indispensable for physical problems. Let
denote the physical domain,
denote the prescribed velocity boundary, and
denote the prescribed stress boundary. These two conditions are also called Dirichlet and Neumann boundary conditions, respectively. They can be expressed as:
where
is the outward unit normal vector of the boundary surface
;
and
are prescribed values of the velocity boundary and the stress boundary.
In addition, the initial conditions are given by:
Furthermore, constitutive equations, which characterize the stress–strain relationship of continuum materials, are also required. However, this is not the research focus of this paper.
2.2. Weak Form
The partial differential equations (PDEs) above are strong-form and thus hard to solve directly. Fortunately, a weak form can be established by multiplying the PDEs with a test function and integrating it over the domain. As the name implies, the weak form has weaker consistency than the strong form but is easier to handle.
The test function tends to be the virtual velocity or the virtual displacement, which appears as the principle of virtual work in mechanics. Let
be the virtual velocity. Multiplying Equation (2) with
and integrating it over
yields:
where
is the specific stress. Then, through Gauss’s divergence theorem [
23], it becomes:
where
is the specific traction.
2.3. Spatial Discretization
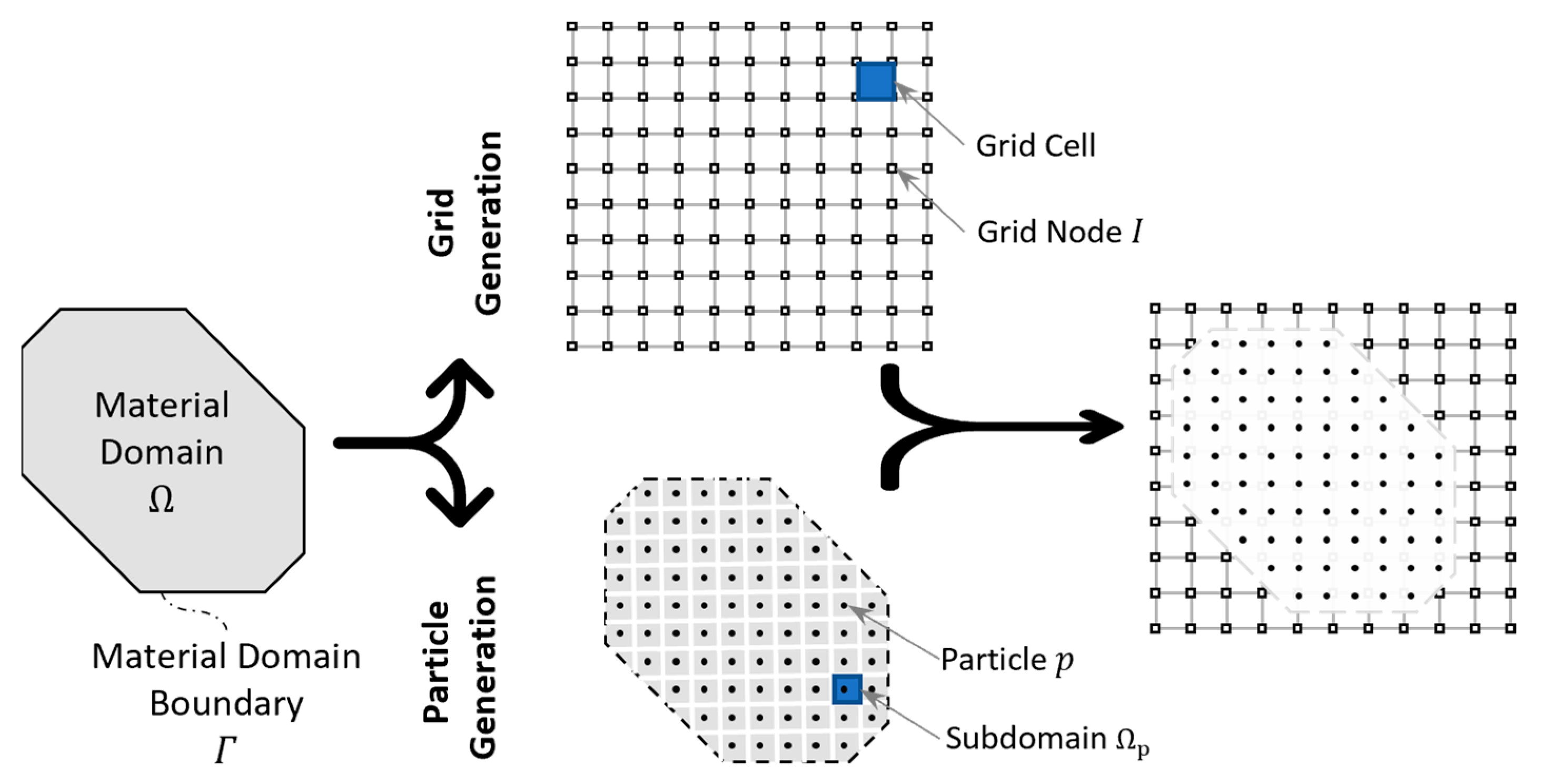
As shown in
Figure 1, the continuum material domain
with boundary
is discretized into a collection of particles. Each particle with an index
stands for a subdomain
and carries corresponding local physical attributes, such as the mass
, position
, velocity
, acceleration
and so on.
Unlike other mesh-free formulations, such as the SPH or the EFG, the field approximation within the MPM is designed independently of particles, thus avoiding neighbor searching. Instead, a Eulerian background grid is laid, covering all potential particle footprints. The grid consists of
nodes with shape functions
associated with the node
. In this way, any physical field
at any position
can be approximated with:
where
denotes the nodal value of the physical field at the node
. With Equation (7), displacement, velocity, and acceleration can be estimated as:
where the quantities with
as a subscript denote corresponding nodal values.
In the classic MPM, the Galerkin scheme is adopted, where the trial functions (
) used for field approximation are also used in composing the test function. In Equation (6), the test function is the virtual velocity
, so it can be approximated as:
where
is the virtual nodal velocity at the node
.
Substituting the approximations
,
,
, and
into Equation (6) yields:
Due to the arbitrariness of
, the following equation must be met for each node
(
):
which can also be written in compact form:
where
is also called the consistent mass,
is the external nodal force, and
is the internal nodal force.
Since the material properties are only recorded at the particles, the Dirac delta distribution
is used to represent the spatial occupation of particles within the classic MPM. In this way, the density field of the total domain can be expressed as:
where
is the particle index,
is the total number of particles,
is the particle mass with index
, and
is the particle position with index
. Then, with the identity
,
,
, and
are developed into:
where the boundary layer thickness
is introduced for dimensional consistency.
2.4. A Typical Explicit Workflow
Here is the typical update stress last (USL) formulation for the temporal advancement [
7]. For clarity, we use
to denote the current moment and
for the future moment. All physical quantities at the moment
are known, and those at the moment
are to be solved.
First, at the beginning of the time step, particle quantities are mapped to the background grid. In particular, particle mass and momentum are of prior interest, since they lay at the core of motion. Using the partition of unity property of shape functions,
, the particle momentum and mass are projected to the grid nodes with the following:
Here, the mass is lumped for computational efficiency, with . Then, the nodal velocity is available with .
Second, the nodal velocities and positions are updated, also conceptually called the ‘advection’. For simplicity, the explicit Symlemetic–Euler time discretization is used like the original MPM, where the position is updated based on the updated velocity.
where
is the nodal acceleration obtained by solving Equation (12).
Third, the updated velocity is projected back to particles in the following way:
With future motion known, the particle stress can be updated. Here, the velocity gradient
is needed and given by:
which is requisite for the strain increment
and the updated deformation gradient
, where
denotes the identity matrix, and
denotes the symmetrization operator. For the linear elastic isotropic model, the particle stress can be computed as:
where
is the matrix trace operator;
and
are the lame parameters. Of course, constitutive models with more complex behaviors, such as elastoplastic and viscoelasticity, can also be implemented based on
,
, etc.
Finally, at the end of the time step, the background grid is reset to its original undeformed configuration.
3. Improvement Strategy
In the discretization above, the shape functions of grid nodes and their gradients play vital roles in transferring mass, internal forces, and external forces. In particular, the estimation of internal force involves the first-order derivative.
The piecewise-linear Lagrange basis with
continuity obviously cannot provide a smooth derivative, so in the classic MPM, internal nodal forces usually oscillate when particles cross the discontinuity locations. Therefore, the GIMP, the BSMPM, the double domain MPM (DDMPM) [
24], and the MLSMPM were successively proposed to provide continuous derivatives. These variants have been proven effective in eliminating numerical noise and promoting stability. However, transfer stencils of the abovementioned MPM variants are enlarged for higher smoothness, especially the currently popular BSMPM. A wider stencil causes higher computational costs of particle-to-grid and grid-to-particle mappings. In particular, the computational cost would be squared or cubed in 2D and 3D cases because of the dyadic product. Even though the accuracy improvement with wide stencil is limited, efficiency has been largely sacrificed.
We found that the hierarchy of Bernstein polynomials has excellent potential, e.g., the partition of unity, to facilitate MPM with more field approximation options. The original Bernstein polynomials are of high continuity, but when they are restricted to a finite element mesh, the continuity at element edges is only and thus not suitable for direct use in the MPM. Therefore, we propose a set of transformations to implement better features. The proposed transformations refer to smoothing and aggregation. For the former, the Bernstein polynomials from the Binomial theory are smoothed with a convolution reformation to eliminate the cell crossing error. For the latter, a node aggregation strategy is implemented to cut down the node demand.
Explicit formulas after transformations are provided in the next section for clarity.
3.1. Basic Requirements of Shape Functions
In some literature, a shape function is also called a weighting or interpolation function, which is used to estimate unknown area based on the range of a discrete set of known data points [
25,
26]. It is fundamental in numerical computation and analysis. Generally speaking, it should satisfy the following properties [
27]:
- (1)
The partition of unity (PU), for all .
- (2)
The compact support (CS), for locations close enough to node .
- (3)
The non-negativity (NN), for all .
Within MPM, the PU property defines completeness and is required for representing rigid motions and constant strains. The CS property can simplify spatial discretization and facilitate efficiency. The NN property ensures positive nodal mass, so that the mass matrix is allowed to be lumped to take the place of consistent mass.
3.2. Bernstein Polynomials
In the binomial theorem [
28], a polynomial
is able to be expanded into a sum involving terms of the form
, where the exponents
and
are non-negative integers with
. The coefficient
is known as the binomial coefficient
.
When
is taken as
, the partition of unity constantly forms regardless of the exponent
. The related terms are known as the Bernstein polynomials:
where
. Once the
is restricted among the interval
, each term is non-negative. In this way, the non-negativity can be completely guaranteed, which is also necessary. Since the interval is finite, compact support is also ensured.
Figure 2 shows cubic Bernstein polynomials, which have four components.
The studies of Bernstein polynomials in approximation and solving PDEs can be found in [
29,
30,
31,
32,
33,
34].
3.3. Smooth Transform for Avoiding Cell Crossing Errors
The Bernstein polynomials with the partition of unity can serve as the base for field approximation. For laying Bernstein polynomials, a grid with cells is required to cover the target field. Each cell has edge nodes to connect neighbor cells. Besides edge nodes, there are internal nodes in each cell. The number of internal nodes per cell is relative to the order of polynomials. For instance, in 1D, quadratic Bernstein polynomials require one internal node per cell, and cubic Bernstein polynomials require two internal nodes per cell. Meanwhile, the number of shape functions equals the degree of polynomials, also called the cell order.
Here, the shape function at cell edges is denoted
, and those at internal cellular nodes are denoted
,
, etc. by the position of nodes. The shape functions of
have the following form:
where
. Those of
(
,
is the order) have the following form:
where
.
denotes the original Bernstein shape function.
From Equations (26) and (27), the Bernstein functions are smooth within the cell but still across the cell boundaries. The absence of smoothness at the boundaries makes Bernstein functions unsuitable for the updated Lagrangian MPM.
In this paper, we adopted the following convolving method to enhance the smoothness of the original Bernstein shape functions:
where
, and
denotes a smoothed Bernstein shape function.
denotes the whole real domain. Equation (28) improves the level of smoothness by one degree, from
to
. In this way, the smoothed Bernstein shape functions naturally eliminate cell crossing errors [
35].
Due to the smoothing effect of convolution, the support domain radius is also enlarged by a half cell. Specifically, in 1D, the shape functions of cover three cells, and the shape functions of other types cover two cells after applying Equation (28). Higher smoothness is available through recursing Equation (28). At the same time, the support domain radius will increase further.
The functions obtained from Equation (28) can be called the smoothed Bernstein shape functions. The smoothed Bernstein shape functions still meet the partition of unity, compact support, and non-negativity. This practically extends the usage of Bernstein functions from the total Lagrangian MPM to the updated Lagrangian MPM.
3.4. Aggregation Transform for Reducing Node Amount
As mentioned above, the Bernstein polynomials require elemental internal nodes. The smoothed ones do as well. Elemental internal nodes may improve field approximation and further numerical precision. However, more nodes are less competitive for efficiency. For example, when using quadratic Bernstein shape functions, each background cell requires 3, 9, and 27 nodes in 1D, 2D, and 3D cases, respectively. In contrast, the quadratic B-spline of smoothness needs only 2, 4, and 8 nodes.
Aimed at efficiency-focused simulation, we propose the following technique to aggregate the shape functions at internal nodes to their nearest neighbor edge nodes.
where
denotes an aggravated and smoothed Bernstein shape function. It should be noted that for any internal node (
), the superscript
must consist in the subscript
since the formulations of smoothed Bernstein shape functions are highly dependent on the node arrangements. The
is a weight parameter related to the relative distance between the node
and node
. We recommend taking
when
,
when
, and
when
, so that spatial symmetry can be met.
In essence, Equation (29) approximates the field probes of internal nodes with their nearest neighbor edge nodes. This significantly cuts down the transferring expense between particles and nodes. Specifically, with the aggregation strategy, the quadratic Bernstein shape functions reduce node demand by 1, 5, and 19 in 1D, 2D, and 3D cases, respectively.
Here, we call the shape functions in Equation (29) the aggregated and smoothed Bernstein shape functions. In this way, we obtained a new MPM variant called ASBMPM. It should be noted that the ASB functions meet the partition of unity, compact support, and non-negativity.
4. Formulation Summary
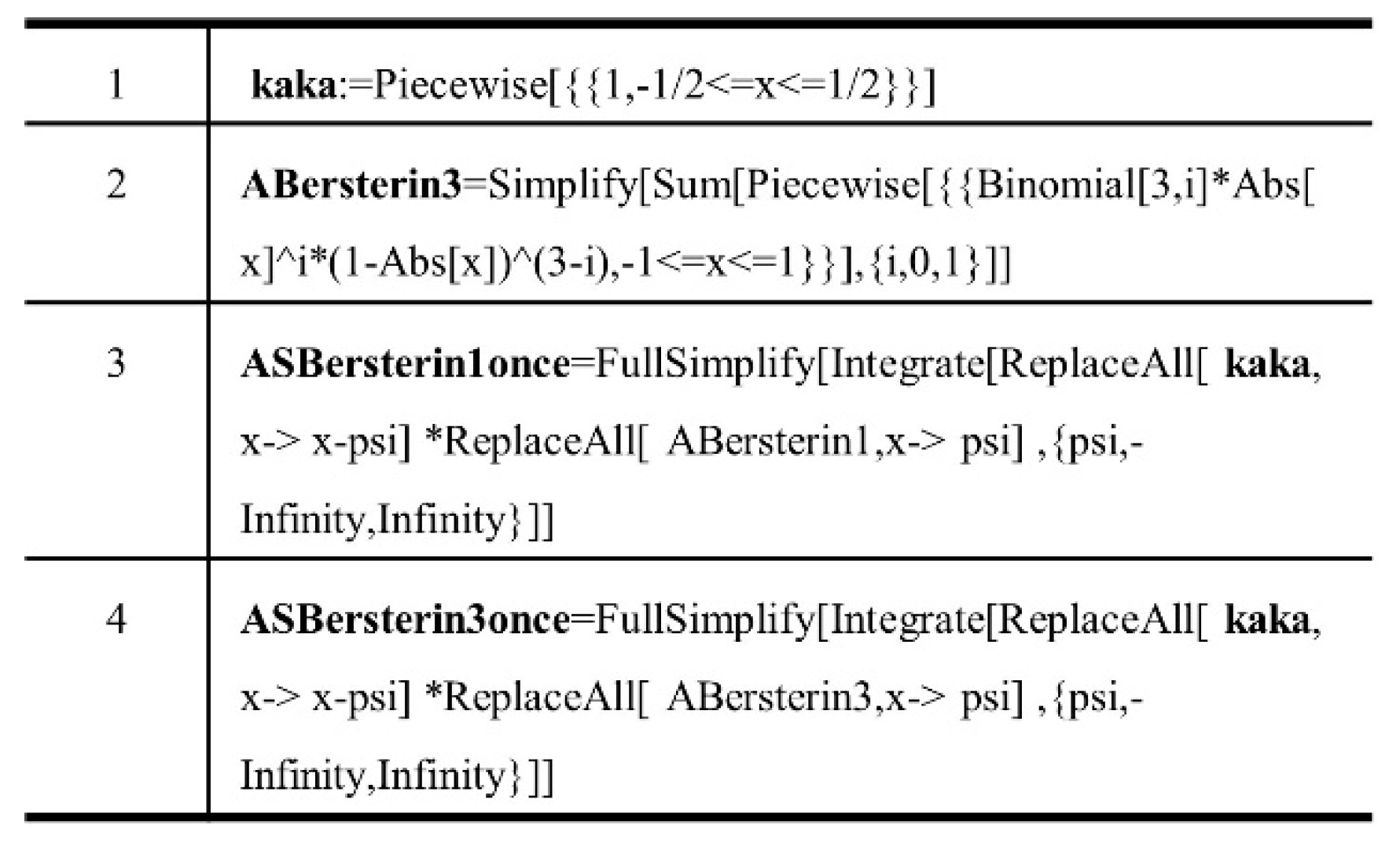
This section provides some of the formulations mentioned above explicitly to make the conceptions easy to implement. However, for simplicity, only several typical ones are listed. For remedy, a piece of Mathematica script (
Figure 3) is given as a reference for deriving a higher hierarchy.
There are two independent configuration axes for the ASBMPM scheme, i.e., the selection of the original Bernstein Shape functions and the level of convolving smoothing recursion. To address the hierarchy unambiguously, we use Roman numerals (I, II, III, etc.) to denote the degree of original Bernstein polynomials and ordinal descriptors (quadratic, cubic, quartic, etc.) to indicate continuity level. For example, the ‘quadratic-III ASB’ refers to the subtype developed from three-degree Bernstein Shape functions by aggregating and once smoothing.
Table 1 shows the formulas of the quadratic and cubic ASBs of subtypes from I to VII, and they are depicted in
Figure 4. In particular, the subtype I is identical to the hierarchy of B-spline shape functions, which can be explained by the convolutive generation of B-spline shape functions [
36]. From this point, the relation that the ASBMPM is a superset of BSMPM is self-evident. This implies certain rationality of ASBMPM, since BSMPM has proved to be reliable.
The expressions in
Table 1 are univariate. For 2D and 3D problems, the shape functions can be obtained via the tensor-product in all directions,
and
, respectively. Due to the multicell dependency, a structured mesh is required in ASBMPM variants.
6. Conclusions
In this paper, a scheme of aggregated and smoothed Bernstein functions is proposed to improve the accuracy and efficiency of the material point method (MPM). The newly proposed scheme is composed of three aspects, i.e., Bernstein functions, smoothing, and aggregation. With choices of original Bernstein functions and degrees of smoothing, hierarchical ASBMPM variants are obtained.
In detail, the basic requirements for a proper shape function are reviewed and distilled first. Then, the Bernstein polynomials are smoothed with a convolution reformation to eliminate the cell crossing error. Afterward, an aggregation strategy is implemented to cut down the node amount required for field probing. Among these three aspects, the aggregation strategy is the core contribution of this paper. This design approximates the field probes of internal nodes with their nearest neighbor edge nodes, so it significantly reduces the transfer expense between particles and nodes.
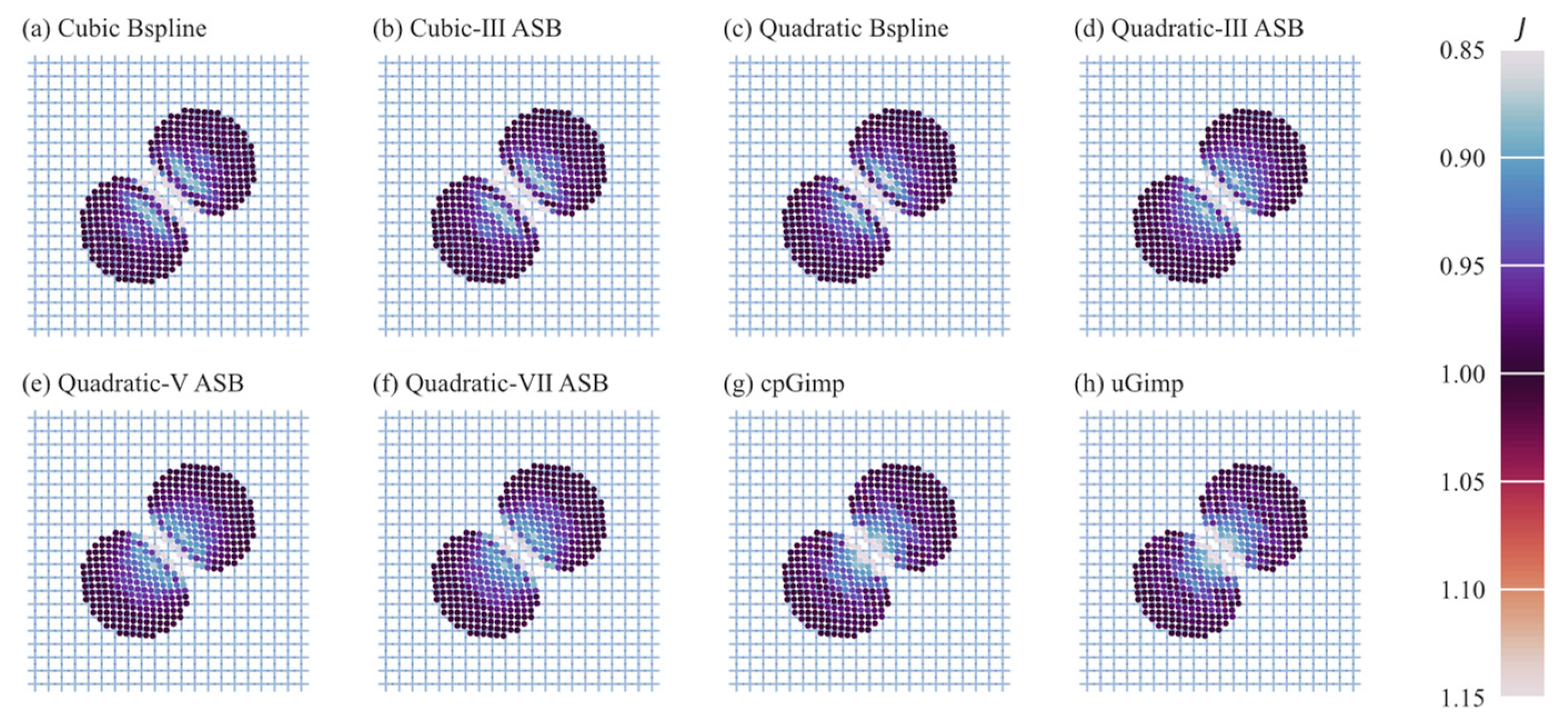
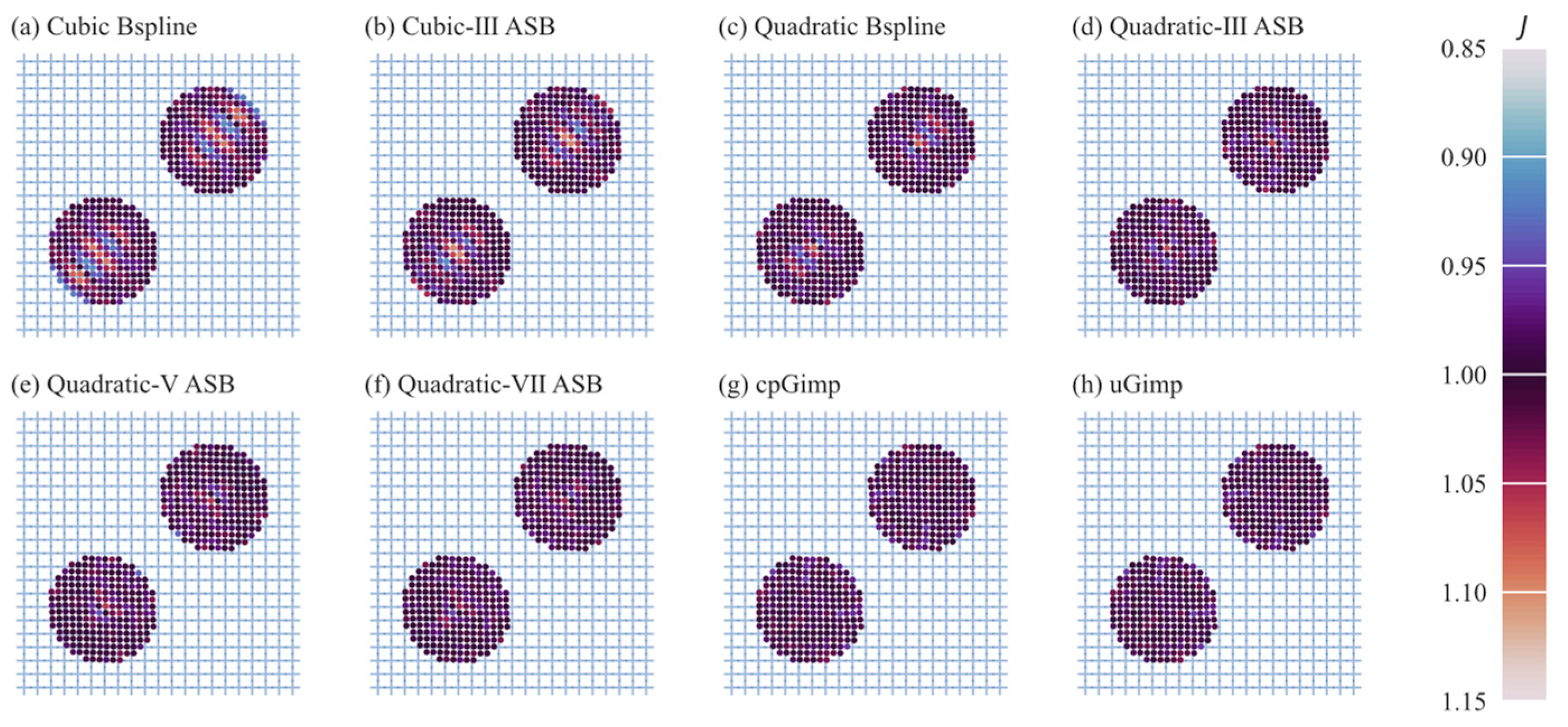
Two classic problems are used to validate typical ASBMPM variants. In the axial vibrations of a 1D continuum bar, ASBMPM variants perform better than BSMPM variants under identical conditions. Notably, one quadratic ASBMPM variant can almost catch up with the accuracy of the cubic BSMPM, even though the support domain of the former is smaller. In the impact of two 2D elastic disks, expected energy evolution is well respected, and reasonable contact features are also observed.
In short, this paper provides a new perspective on function approximation and spatial discretization for the MPM. We believe it is fully compatible with classic MPM frameworks and codes. Implementing ASBMPM variants based on the current MPM libraries requires very few modifications. In addition, since properties such as compact support, the partition of unity, and non-negativity are all well met, the newly proposed shape functions can also be applied to other usages involving function approximation.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}