1. Introduction
Many economic and financial phenomena are modeled by dynamical systems based on differential or difference Equations [
1,
2,
3,
4,
5]. Financial exhibition can be seen as an elective, flexible and active inquiry field that can be used to modify the functions of any investigation method, strategy or inquiry center. According to [
6], financial demonstration may be thought as a multi-discipline research strategy that encourages the consideration of a variety of socio-economic-political concerns which can have a negative impact on society anywhere and at any time. However, it shall be asserted that financial demonstration has become an essential technical-theoretical explanatory instrument for future academics, financial experts, strategy builders and transnational educators. The importance of “stabilizing an unsteady economy” through adequate macroeconomic stabilization measures implemented by government and central bank is highlighted. It is vital to understand how business emergencies arise and how they can be managed in order to be proficient in these tactics. As a result, studying dynamic nonlinear macroeconomic models could provide new insights in this area.
Various models and methods for examining economic indicators of an economy can be found in the literature. Modeling principles in economic environments is presented in [
7]. A book dealing with economic models based on ordinary and partially differential equations is [
8], where the following three topics of financial engineering are covered: control and stabilization in financial models, state estimation and forecasting and validation by statistical methods of decision-making tools. A macroeconomic model applied to three national economies is presented in [
9], where approach is based on three main tools: the state-space modeling from control theory, fractional calculus and orthogonal distance fitting method. A model for studying the perspective of annual flow of inheritance (in level or as a share of national income) in a two-sector economy with one pure consumption good and one capital good was recently presented in [
10]. Using tools from dynamical systems theory, two endogenous behaviors, which can operate independently or together, are obtained. It is shown that theoretical results provided by the model are consistent with some empirical data. In a recent paper [
11], a deep learning method for matching the production of wind energy with consumers’ needs is presented. A neural ordinary differential equation is used to model the wind speed continuously. A mathematical model based on differential equations for studying epidemic and economic consequences of COVID-19 is presented in [
12]. The model deals mainly with interactions between the disease transmission, the pandemic management, and the economic growth. A macroeconomic development model, known as the Grossman–Helpman model of endogenous product cycles, is presented in [
13], where the stabilization problem is studied by a method based on optimal control.
A three-dimensional (3D) model to study the interactions of three macroeconomic indicators in a given economy is presented in [
14]. This model is based on three ordinary differential equations and was designed to describe the relationships between three financial instruments: the interest rate
, the investment demand
and the inflation rate
. By studying the local behavior of the model around one of its equilibrium points, conditions to stabilize the economy around this steady state have been obtained in [
14]. The finance system is an essential component of our economy that consist of interactions between the institutional units and markets, generally in a complex manner for the purpose of economic growth in investment and the demand of commercials. When an inflation occurs and a chaotic phenomenon appears in the finance system, the interest rate must be adjusted and controlled, regarding our model, it is possible by introducing a control function. The control of finance system goes to a quick and effective revival of the economy. This method is used when an economic crisis occurs. In order to find more economically relevant steady states to which the 3D model could be stabilized, we apply a control function to the model and study the resulting four-dimensional (4D) system. In addition, we consider in this work that
is the
real interest rate, which is defined as the difference between the nominal interest rate and the inflation rate, thus,
may take positive or negative values.
A generalization to fractional order version of the 3D model is reported in [
15], while in [
16] the generalized model is studied in a new framework with delay. Moreover, Ref. [
16] investigates by numerical simulations the effect of time delay to chaos in the model, while methods to suppress chaos in the model were presented in [
17]. Fractional-order dynamical models and their bifurcations [
18,
19,
20,
21,
22,
23] are promising tools for studying economic models.
The paper is organized as follows: after the introduction,
Section 2 describes the model to be studied and presents a local analysis of its behavior, where equilibrium points are characterized in terms of their type and stability properties. The occurrence of transcritical and pitchfork bifurcations when the system’s parameters vary is particularly pointed out.
Section 3 provides bifurcation diagrams for several combinations of parameters, revealing the complex behavior of the system.
2. Local Analysis of the Model
The 3D system studied in [
14] is given by
where
denotes the usual derivative with respect to time. The system has been studied in the first octant given by
and
, where
is the real interest rate,
the investment demand,
the inflation rate,
the amount (of money) saved,
the cost per investment,
the elasticity of the demand on the commercial market.
We propose in this work to apply a feedback control function
to the first equation of (
1) in the form
where
with
and
Then,
u satisfies the equation
which, together with (
2), lead to a new four-dimensional (4D) system, given by
where
, respectively,
The parameter vector is T stands for the transpose here.
Therefore, the four-dimensional system of differential equations to be studied is
The model (
3) presents economic relevance whenever its state variables lie in the set
The new differential equation in leads in general to a different behavior of all state variables in the 4D model compared to the 3D model. In what follows, a qualitative analysis of the new model is investigated by well-known tools from the dynamical systems theory, providing several bifurcation diagrams which describe the local dynamics of the model around its equilibrium points.
The control introduced in this work by (
2) is far from being unique. More other different control laws can be proposed. They can be designed as equations of type (
2) or other types of constraints applied to one or more of the basis equations of the model. Their final role is to determine different behaviors of the transformed 3D model, which have economic relevance and are desirable in an economy.
Remark 1. The hyperplane is invariant with respect to the flow of (3). The model (3) with and was studied in [14]. Our next step is to determine the equilibrium points
of system (
3), which are the solutions of the algebraic system
The system (
3) has four isolated equilibrium points:
for all
and
the pair
and
for all
and
, respectively,
, where
for all
and
Remark 2. Since may be positive or negative in (3), three different equilibrium points with economic relevance arise in the 4D model (3), while in the 3D model (1) only one equilibrium presented economic relevance and was studied in [14]. Notice that coincides with if , respectively, and collide to on and . In addition, the system has two more non-isolated equilibria for , that is, if , respectively, if .
If P is a saddle equilibrium point, denote by the dimensions of its stable and unstable manifolds. For denote by
Theorem 1. Assume Then:
- (a)
if , the equilibrium point is a saddle with ;
- (b)
if and , the equilibrium point is a saddle with ;
- (c)
if and , the equilibrium point is a saddle with .
The next result gives us a characterization of the nature of the equilibrium point
for the case when the parameter
m involved in the differential equation of system (
3) describing the control function
u is negative. Moreover, the dimensions of the stable and unstable manifolds are established, respectively.
Theorem 2. Assume Then,
- (a)
is a saddle with if , respectively, if and
- (b)
is an attractor whenever and
- (c)
if a Hopf bifurcation occurs at on
Proof. The eigenvalues associated with the equilibrium point are m and where and Since and the proofs of the above theorems follow (except the point c) of the last theorem.
For the case (c), assume is the bifurcation parameter. A necessary condition to have Hopf bifurcation at is which is equivalent to It follows that can cross 0 from negative to positive values if and only if At the obtained eigenvalues are purely complex. Since if a Hopf bifurcation occurs on The bifurcation is non-degenerate if the first Lyapunov coefficient is nonzero, in which case a limit cycle (stable or unstable) arises around the equilibrium when crosses If the bifurcation becomes degenerate and more limit cycles may arise around when crosses □
In the following we study how the equilibrium point bifurcates from the equilibrium point when the parameter m crosses 0, respectively, how equilibrium points and are born from when parameter increases from 0. We will show that the equilibrium points bifurcate from through transcritical, respectively, pitchfork bifurcations.
Theorem 3. Assume The system undergoes a transcritical bifurcation at if and , respectively, a pitchfork bifurcation at if and
Proof. If
and
the eigenvalues of
are
0 and
with
if
are real, this follows from
To prove the transcritical bifurcation, we will use Sotomayor’s theorem [
23]. Denote by
The Jacobian matrix
of the vector field
expressed at
and
has an eigenvalue
with a corresponding eigenvector
The value
is also an eigenvalue for the transpose matrix
which has a corresponding eigenvector
T stands for the transpose here.
It is clear that and where is the Jacobian matrix of the vector field It remains to determine where, by definition For a real-valued function V open, and a vector denotes the differential of second order applied to the pair Taking into account the expression of one needs to determine only at which is Finally,
For the pitchfork bifurcation at
we observe first that
is an invariant manifold of the system (
3). Since
for all
the bifurcation takes place on
and can be studied by restricting the system (
3) to
Translating first
to the origin
by
the system (
3) restricted to
reads
where
, respectively,
and
and
become equilibrium points of the system (
4).
The stability of the equilibrium
O in the system (
4) has been studied in [
14]. In addition to the results from [
14], we show that the points
and
are born from
O when
crosses 0 from negative to positive values by a bifurcation of type nondegenerate pitchfork. This bifurcation was not studied in [
14].
Consider
the bifurcation parameter with
and
and
collide to
O at
The eigenvalues of
O in (
4) at
are
and
with the corresponding eigenvector to 0 given by
The system (
4) is
—equivariant with the symmetry
Indeed,
and
In other words, the system (
4) remains unchanged by applying the transformation
Notice that, we can write
where
and
such that
if
and
if
With these notations, it follows that
when needed, we write a vector
as
Thus, applying a result from [
24] page 284, the system (
4) undergoes a pitchfork bifurcation at
which can be degenerate or not. To determine which is the case, we proceed as it follows. Find first the normal form of (
4). To this end, consider the transformation
where
is a column matrix containing the eigenvectors corresponding to the eigenvalues
and
of
O at
that is,
and
and
The system (
4) in the new variables
and
reads
where
Since the eigenvalues of
O in (
4) at
are
and
(in this order), we consider the extended system of dimension 4 formed by
and the three equations from (
5). The new system has at
the eigenvalues
and
thus, applying the Center Manifold Theorem, there exists a two-dimensional center manifold
of class
of the form
and
which locally (in cubic terms) can be expressed by
Using the method of undetermined coefficients, we found
while the other coefficients are all
Therefore, the system (
5) on the center manifold
is of the form
where
is a smooth function of
with
and
thus, the pitchfork bifurcation is non-degenerate. To find the function
higher order terms are needed in the expressions of
and
We notice that the coefficient
could be obtained without considering the extended system, by finding the
dimensional center manifold
directly in the system (
5) and then the restriction of (
5) on
In this case,
is given locally by
and
Applying the method of undetermined coefficients, one can show
and
while the other coefficients are
These lead to
. The advantage of using the extended system is that
may also be determined. □
Remark 3. The Sotomayor’s theorem for pitchfork bifurcation gives no answer to the problem because
The local behavior of the system (
3) at
The characteristic polynomial at
and
with
is
where
and
“
” corresponds to
and “
” to
Denote by
and
the roots of
, respectively,
and
Since the roots of
satisfy
are saddles or attractors. Denote by
By Routh–Hurwitz conditions,
and
have negative real parts if and only if
which are equivalent to
and
We notice that (
6) are satisfied at least for
sufficiently small and
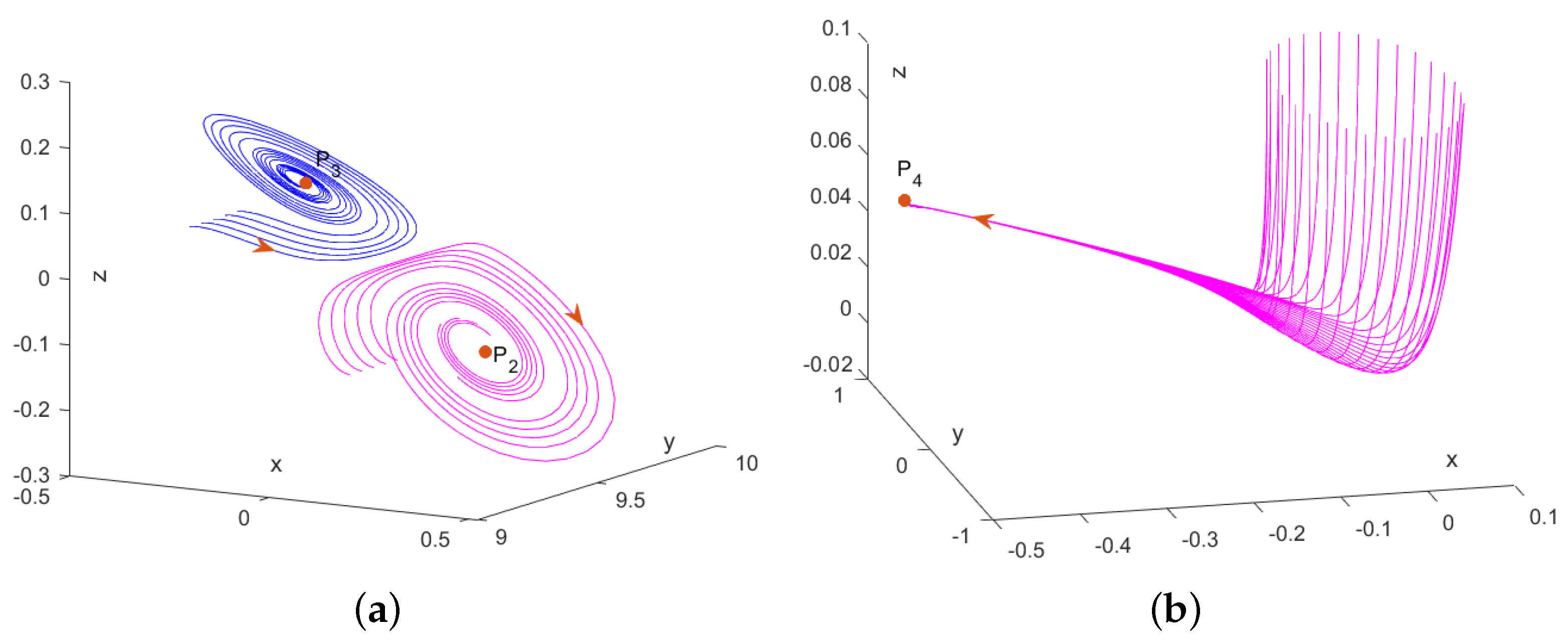
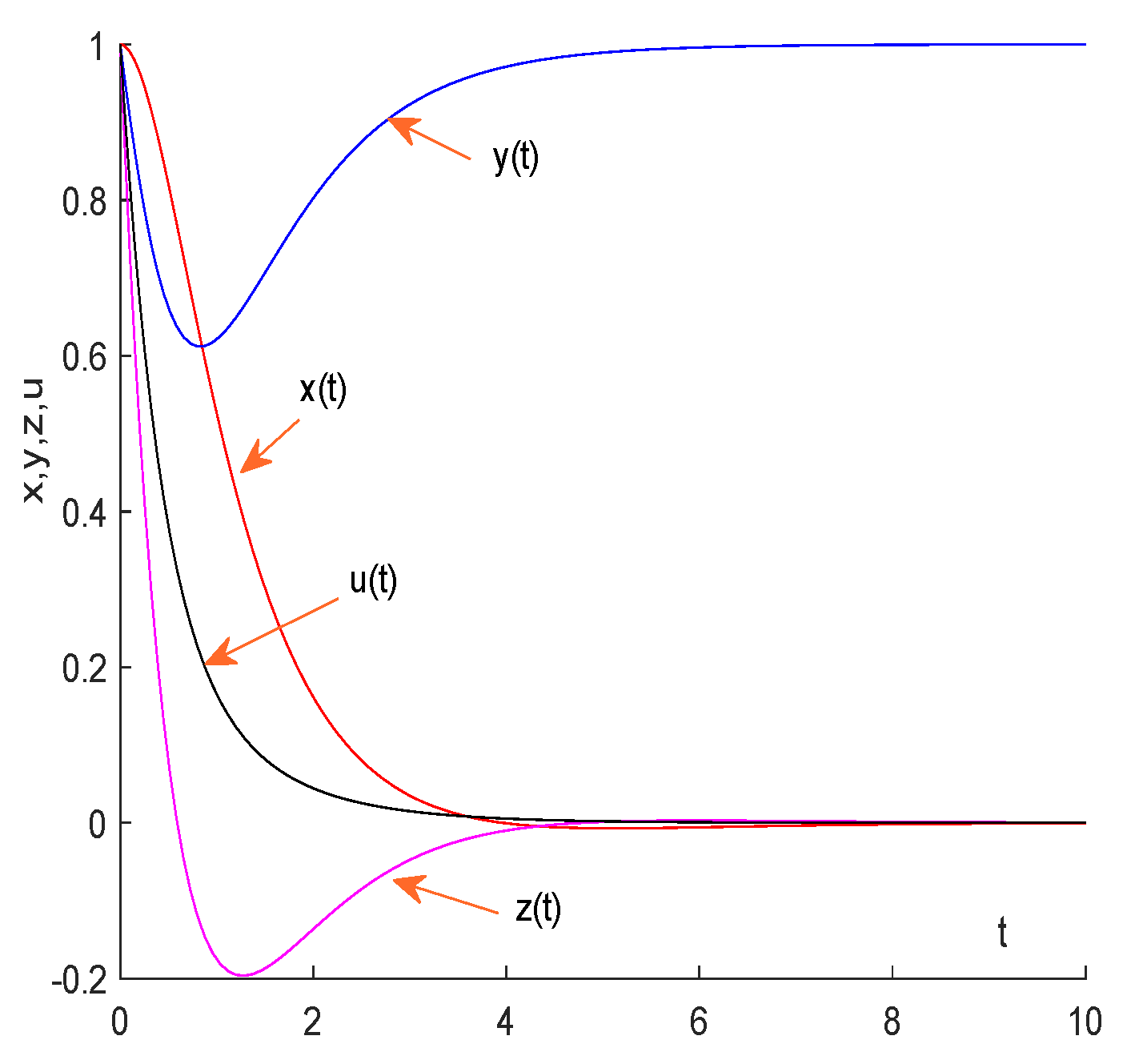
The results are summarized in the next Theorem 4. The attractors
and
with orbits converging to them are illustrated in
Figure 1.
Theorem 4. Assume Then, and are attractors if (6) is satisfied and for respectively, for In the other cases with and are saddles. The local behavior of the system (
3) at
The characteristic polynomial at
is
where
and
and
Remark 4. Denote by and Then and can be written in the forms where and
For arbitrary fixed, define the following curves lying in the parametric plane: and Notice that b corresponds to the -axis, while a to the -axis, and all curves are included in the region
Theorem 5. If then is a saddle. Assume Then,
- (a)
is a saddle or an attractor for all and
- (b)
is an attractor if and only if and In particular, if and sufficiently small, is an attractor, as shown in Figure 1.
Proof. It is clear that is a saddle if since the product of its eigenvalues is negative.
- (a)
Let further be
Assume first
thus,
It is clear that
if
thus,
Let Then, yields thus,
Secondly, assume
Then
and
follow from
For an arbitrary fixed
denote by
and
four points from the corresponding curves. Then,
where
Notice that
and
More cases need to be considered further.
- (a1)
Assume
The curve
is given by
with
and
One can show that
is equivalent to
If
then
thus,
If
then, from
and
one gets
which leads to
- (a2)
Assume
and
Then
as well. Since
and
it follows that
and
we denoted as usual by
for
From (
8), one get
and
since
if
For denote by and the two regions from corresponding to respectively, Then on the region Notice that because and
If
which is equivalent to
one can show
whenever
It follows that
on
Therefore,
or
on
whenever
and
- (a3)
Assume
and
thus,
Since
it follows that
and
Notice that
In the region denote by and Then on the region Notice that because and
Assume further
If
then
It remains the case
We notice that
may intersect
in the region
since
may be zero. The inequalities
and
yield
thus,
which, in turns, leads to
Then,
and (
10) yield
which implies
because
follows from
and
Therefore,
It follows that, or or whenever if and which, in turn, imply that at least one eigenvalue has This confirms the proof.
- (b)
The result follows from Routh–Hurwitz conditions for
which are
and
For the particular case, we write the expression
as a polynomial in
for some coefficients
thus,
The condition
follows from
and
□
Example 1. The equilibrium point does not exist in the 3D model. This happens due to the control function , defined by the two constraints in the new 4D model. When is an attractor and , the three state variables, namely the real interest rate , the investment demand and the inflation rate , can be stabilized at least locally around three fixed values and respectively, which are economically relevant if and This scenario does not arise in the 3D model since is not a steady state of the model.
3. Bifurcation Diagrams
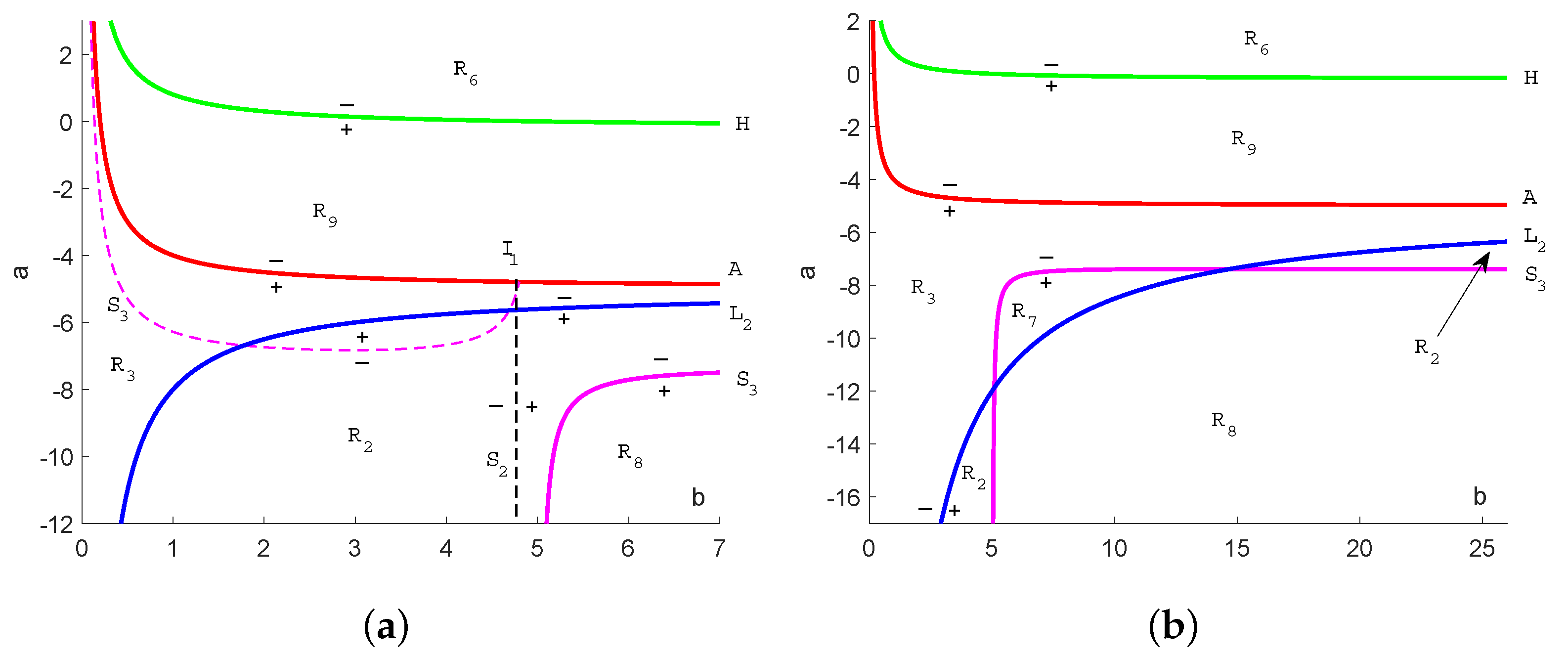
The curve
A has a unique branch of the form
lying in
for all
arbitrary fixed, which splits the region
R into two parts:
in the region from
R that contains the origin
and
in the other region, as shown in
Figure 2,
Figure 3,
Figure 4 and
Figure 5.
is the vertical line thus, on the left of and on the right of for all arbitrary fixed. If If the curve lies on thus, it is outside the region of interest. However, the sign of is important if as well.
If
the curve
has in
R two branches asymptotically to the vertical line
(on the left and right of the line) given by
Notice that
if
It follows that
in the region from
R that contains
The sign of
changes when
crosses a branch of
as shown in
Figure 2,
Figure 3,
Figure 4 and
Figure 5. Notice that a branch of the curve
may lie on
especially if
and this branch is not taken into account (it is not depicted in
Figure 3 and
Figure 4) because
do not exist on
If
then
thus,
has two branches in
R as well: one is the vertical line
and the other is the curve
as shown in
Figure 3b. It is clear that
in the region from
R that contains
If the curves and intersect at the same point with and If in addition then where and thus, If then
Since
and
by Theorem 5, the curves
and
devide the region
R into two disjoint subregions (on the left and right of
, and the same for
), as shown in
Figure 2,
Figure 3,
Figure 4 and
Figure 5. On one subregion
is a saddle, while on the other
is a saddle or an attractor.
The following theorem clarifies the intersection of the bifurcation curves and Since has constant sign on if only the case is needed. We assume further and The case and is similar.
Theorem 6. Assume and The following assertions are true.
- (1)
If and the intersection on has zero points if one point if , respectively, two points if where
- (2)
If and then either or on
- (3)
If the intersection has a single point on and
Proof. Since
the curve
is defined only on
and is given by
with
The intersection
satisfies
and
which lead to an equation in
b of the form
- (1)
By
(
11) reads
where
and
Its roots
satisfy
Thus,
and
iff
and
(the discriminant). Since
the inequalities lead to
and
that is,
and
However,
where
and
lead to
Moreover,
leads to
which, in turn, leads to
Therefore,
and
iff
In this case
where
, respectively,
and
It is clear that
if
If
and
then
thus
is the empty set.
- (2)
If
then
If
then
and
on
while,
if
Let
and
Then
and
- (3)
Assume
Then, the roots
of (
11) satisfy
thus,
and
notice that the discriminant of Equation (
11) is positive. It follows that
where
and
If
then
where
The theorem is now proved. □
A similar result can be obtained for the intersection of the curve with Since has constant sign on if only the case is needed. We present the result for and while the remaining case and can be treated similarly. A proof of the next theorem can be obtained as above.
Theorem 7. Assume and The following assertions are true.
- (1)
If and the intersection on has zero points if one point if , respectively, two points if
- (2)
If and then either or on
- (3)
If the intersection has a single point on and
Remark 5. For and we obtain:
- (1)
If and then and has the same sign as on and if The curves and coincide.
- (2)
If and then and has the same sign as on and if The curve coincides to in this case.
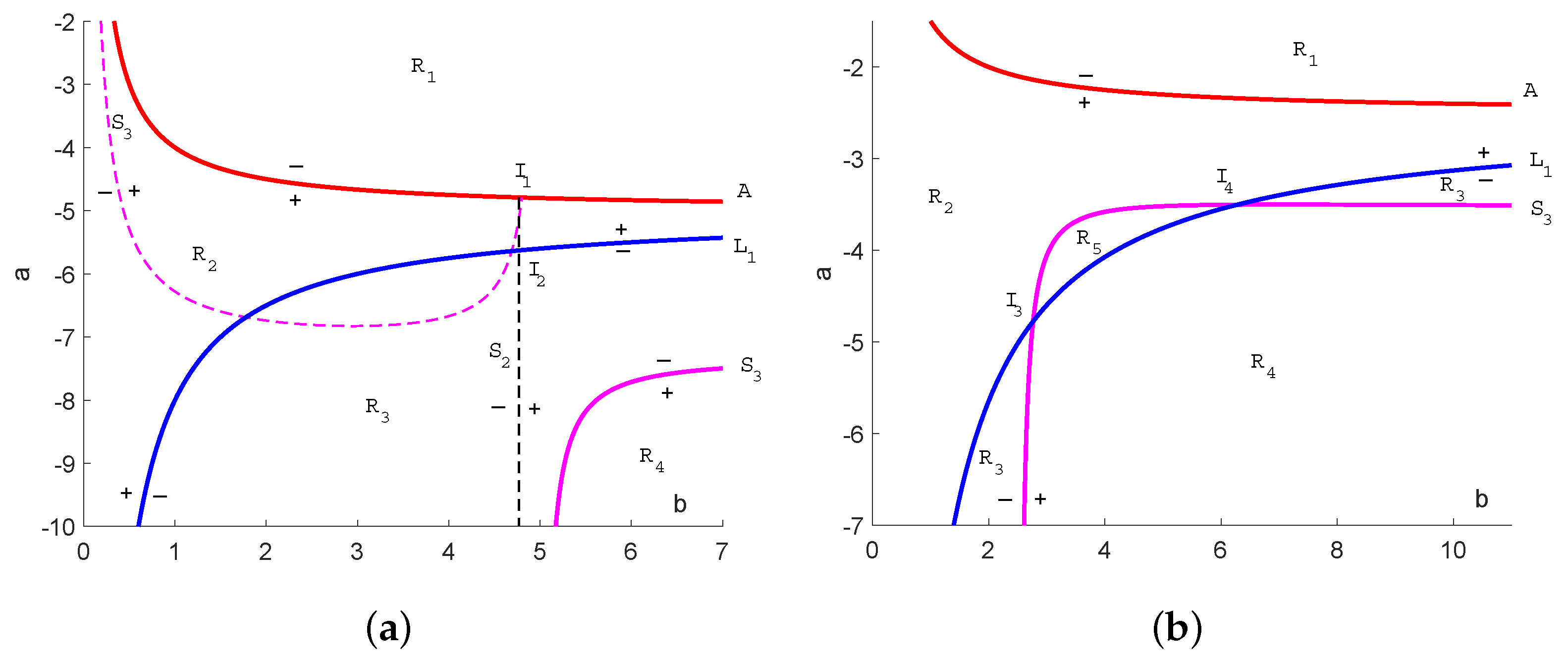
Remark 6. In the following cases, we will determine the bifurcation diagrams of the system (3) when and , respectively, and One can proceed similarly in other cases. Case 1. Assume first
and
Notice that
whenever
exists, and
coincides to
Based on Theorem 6, two main bifurcation diagrams arise to describe the system’s dynamics, as shown in
Figure 2a,b. The bifurcation curves in the two diagrams are illustrated in Matlab:
Figure 2a uses
and
while
Figure 2b
and
Case 2. Assume
and
Then
lies on
and
on
By Theorem 6,
in the region
from
One can show
on
and
in the region
R where
As in case 1,
on
and
coincides to
In particular, if
then
and
Two main bifurcation diagrams emerge in this case, which are depicted in
Figure 3a,b. The curves are illustrated for
and
in
Figure 3a, respectively,
and
in
Figure 3b.
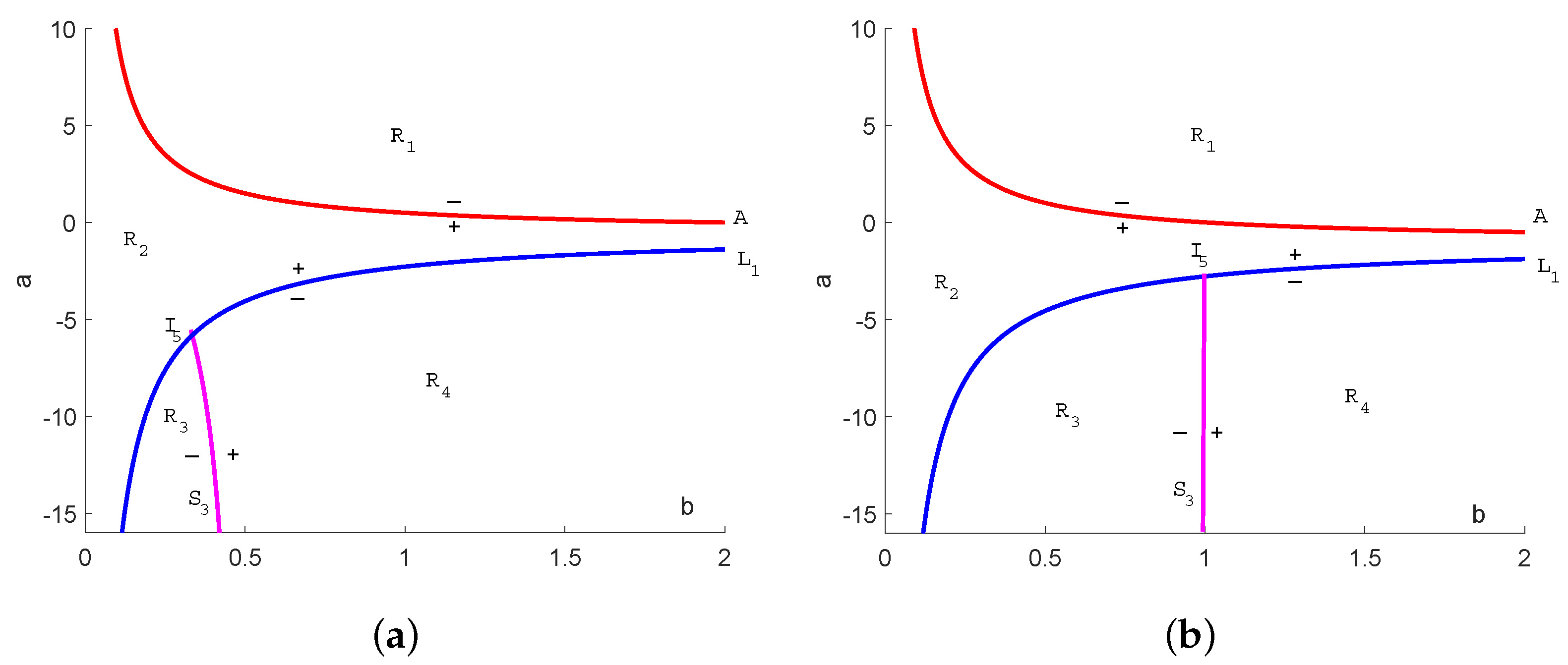
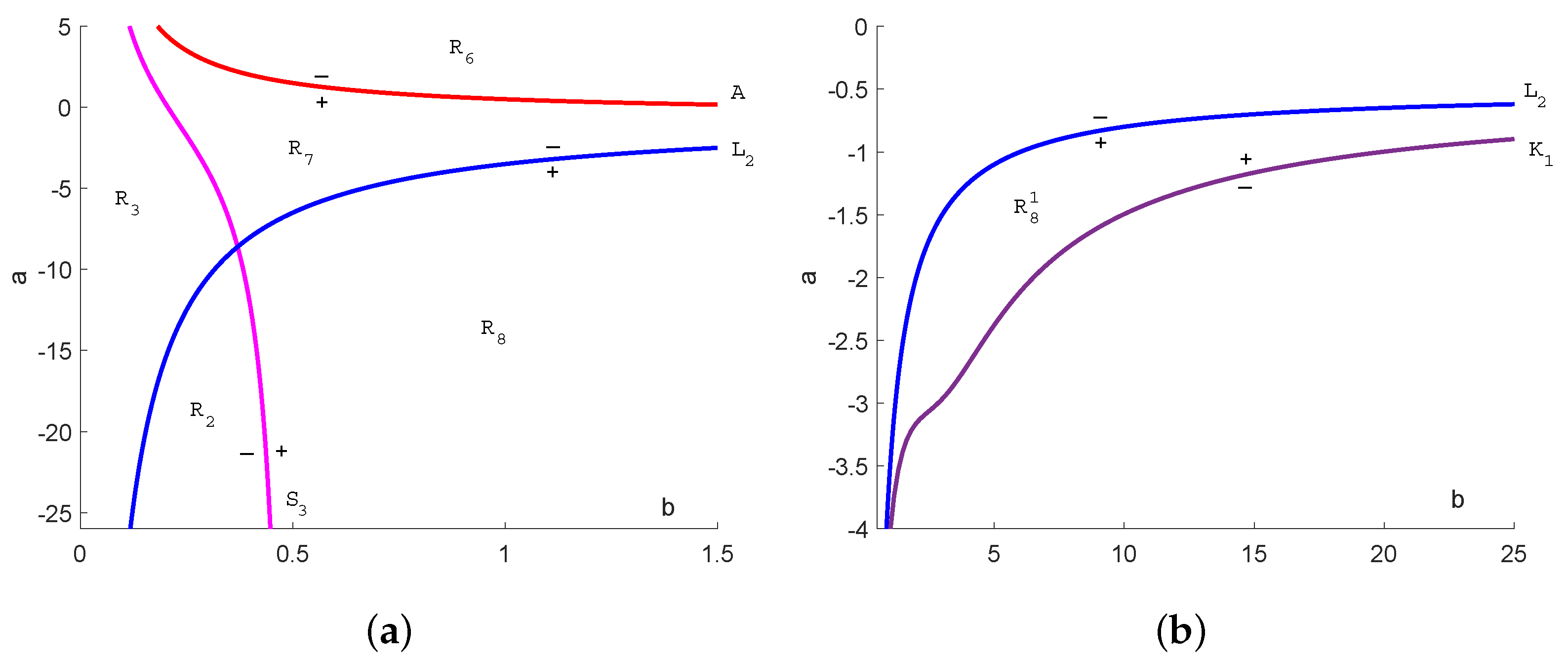
Case 3. Assume
and
The curve
is given by the same expression as
The curve
coincides to
in this case;
whenever
exists. Furthermore,
on
and
if
respectively,
in the region
R where
Using Theorem 7, a bifurcation diagram is presented in
Figure 4a.
Figure 4b presents a region
where
is an attractor, in a typical case
and
The strip
is quite large, it extends to infinity along the horizontal axis when
is large. We denoted by
the curve
Case 4. Assume
and
thus,
if
By Theorem 7, two main bifurcation diagrams arise to describe the system’s dynamics, as shown in
Figure 5a,b.
Figure 5a is illustrated for
and
while
Figure 5b for
and
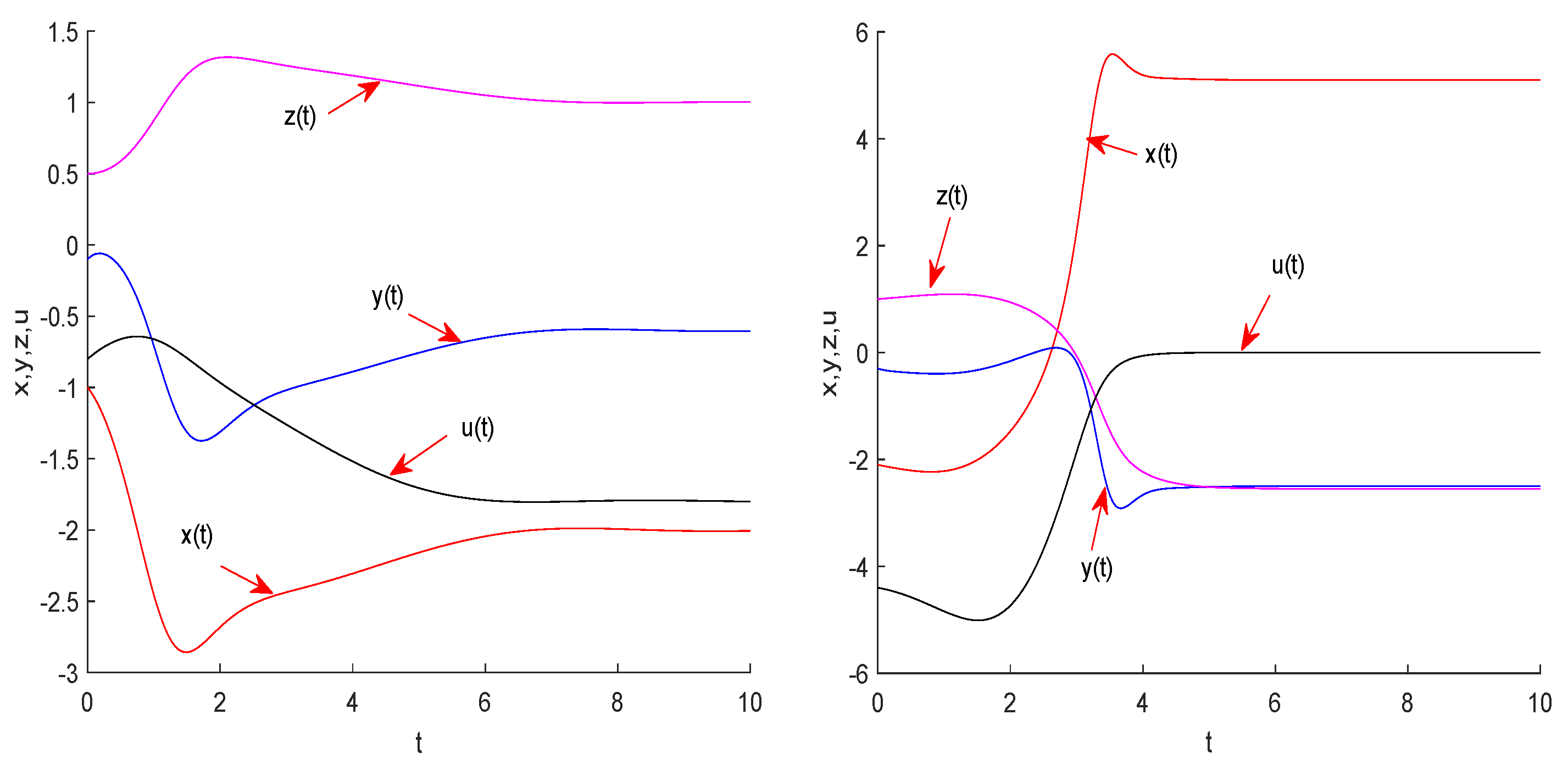
Remark 7. The type of the equilibria and as they appear in different regions from the above bifurcation diagrams presented in Figure 2, Figure 3, Figure 4 and Figure 5, are described in Table 1. The different behavior of
as an attractor on the region
is presented in
Figure 6, while the two possible states of
as an attractor or saddle are depicted in
Figure 7.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}