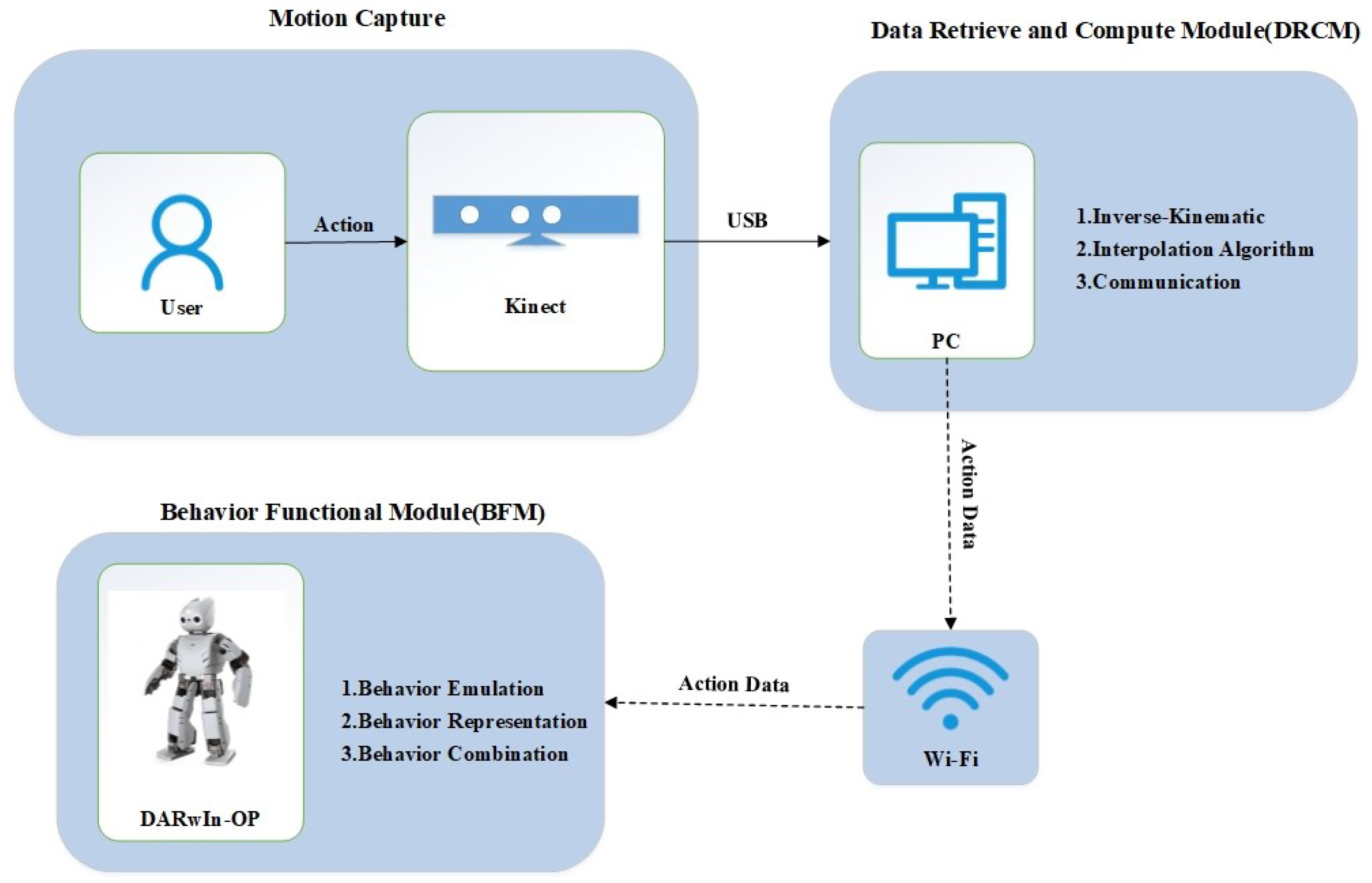
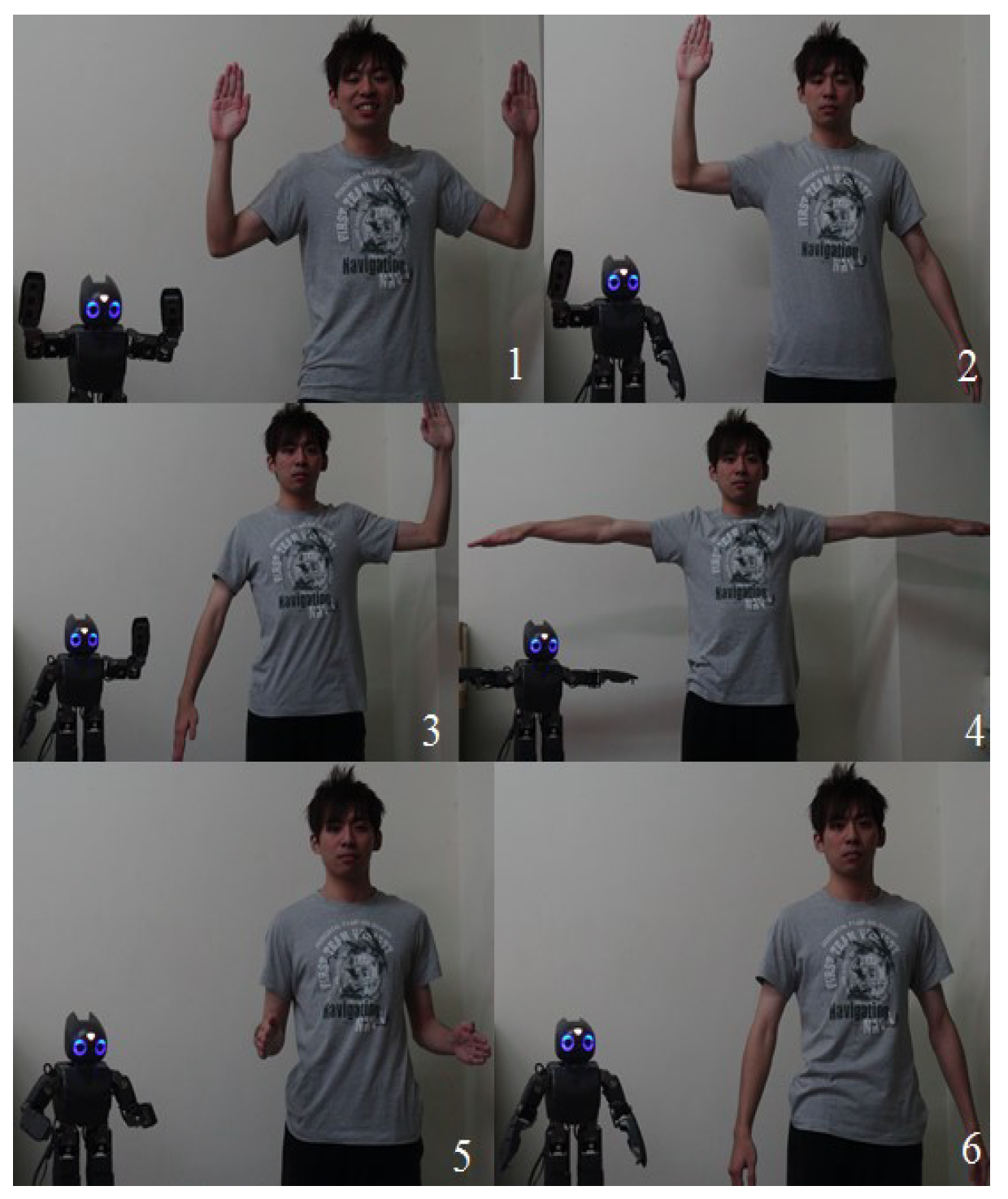
The architecture of the proposed system is shown in
Figure 1. The personal computer (PC) in the system implements an inverse-kinematic algorithm and interpolation algorithm to process the data collected by the Kinect, a line of motion sensing input devices, and sends the results to the robot via a wireless network. On the humanoid robot side, three basic functional modules are implemented. Respectively, they serve for action emulation, action replay, and action memorization. When the RGB-D camera observes an action taken by a particular user, it sends the raw data to the PC, which further processes the data to convert them into geometrical information that is compatible with the modules on the robot.
2.1. Key-Pose Detection Algorithm
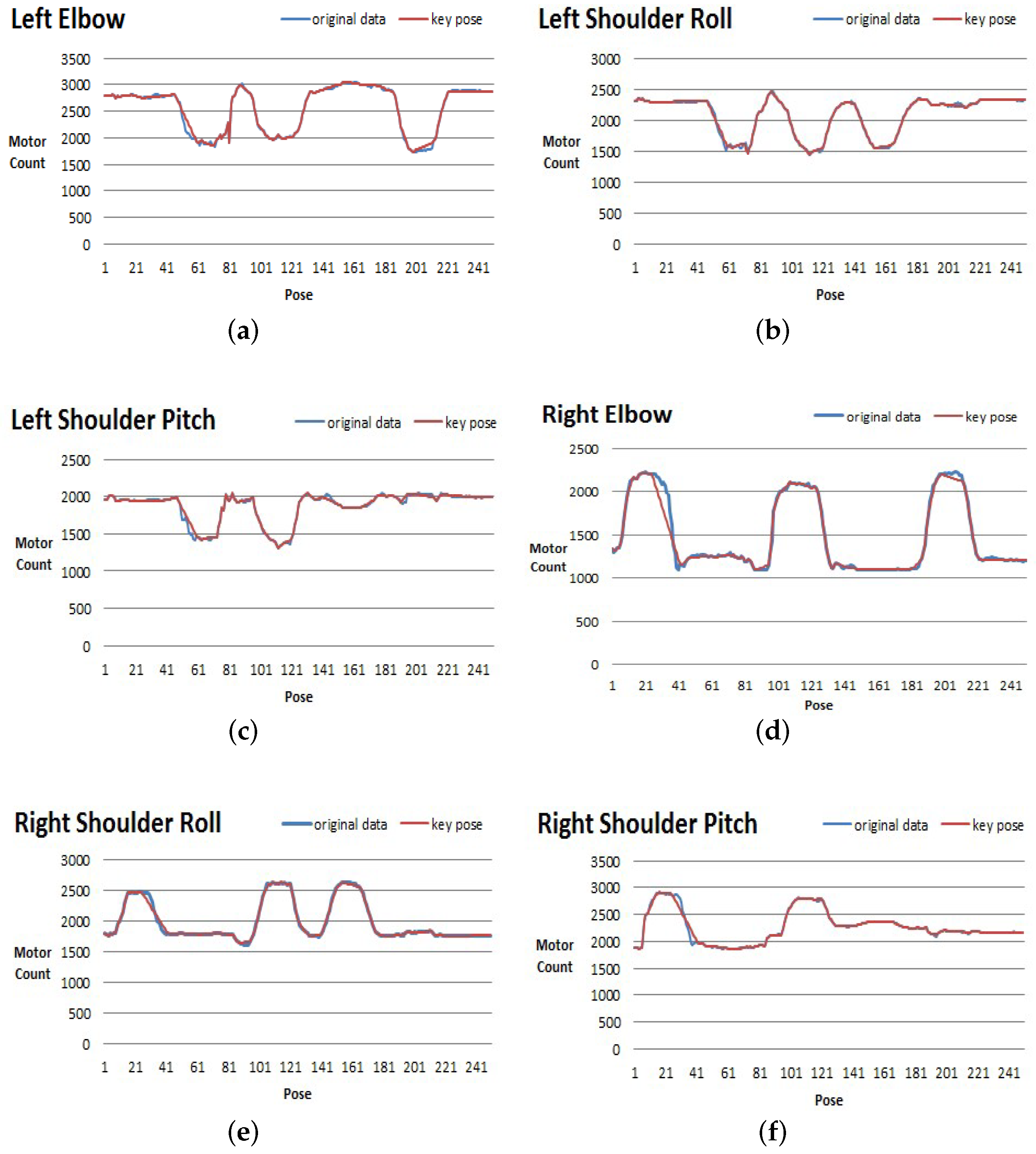
’Key pose’ is a term that originates in the animation field, where an action can be fully reflected by several key poses extracted from the action. It has already been applied in academic research as well. In our system, an action is defined as a sequence of many pose frames. Key poses are defined as the essential poses taken out of the sequence of poses of an action and are capable of composing a new sequence of poses necessary to recreate the action, from which ’essential’ means that once one of the key poses is deleted, the action created by the new sequence of key poses will have an unacceptable error value compared to the original action, or will not look similar to the original action at all.
When implementing behavioral cloning on robots, if image frames collected by the RGB-D camera are directly recorded to represent any actions, a large amount of storage space will be consumed. Additionally, it costs huge calculating resources to process and retrieve image data, which may result in lags in the system. Therefore, the key-pose detection algorithm is proposed to identify and record the key poses.
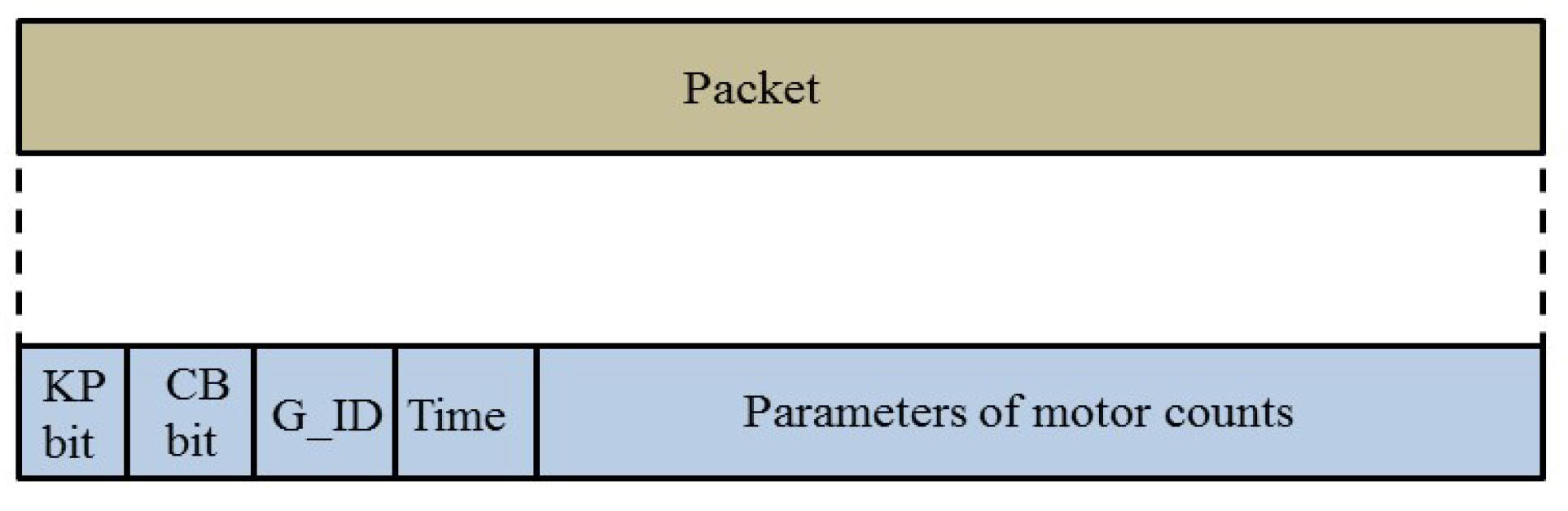
UDP, user datagram protocol, is chosen as the communication protocol in our system since retrieving data from the RGB-D camera only costs about 70 ms each time. Because of the relatively short time intervals, the action emulation can work even if some packets are lost. As is shown in
Figure 2, each UDP packet contains motor counts, a bit for conforming key posture, a bit for conforming continuity, the group ID of the key pose, and the time interval needed by the pose.
‘KP_bit’, ‘CB_bit’, ‘G_ID’, and ‘Time’ in
Figure 2 respectively refer to the ‘key pose bit’ (the bit for conforming key posture), ‘continuous bit’ (the bit for conforming continuity), the group ID of the key pose and the time interval between the next key pose and the key pose. If the value of ‘KP_Bit’ is 0, the value of ‘Time’ will be 0 as well. Otherwise, if the value of ‘KP_Bit’ is not 0, the value of ‘Time’ will be exactly the time interval between two key poses.
Algorithm 1 shows how each key pose is identified. Each time the skeleton data are generated, the data are simultaneously determined whether they are a key pose or not by the information about the rotation direction and speed of joints in the skeleton data. In Algorithm 1, two variables recording current and previous states are set to check whether the state in the algorithm changes. Firstly, inverse kinematics is implemented to calculate the rotation angle of each joint. Then, the value of the current angles of the joints is compared with the previous value. The state that the discrepancy between two angles is bigger than a preset threshold is defined as an ‘action state’. Otherwise, it is a ‘static state’. If the current state differs from the previous, key_pose_bit will be set as 1; otherwise, it is set as 0. After that, if the key_pose_bit is 0, the rotation directions of each joint are checked to be changed or not. If they are changed, the key_pose_bit will be set as 1. Otherwise, it will be designated as 0. All the data in the algorithm will be saved.
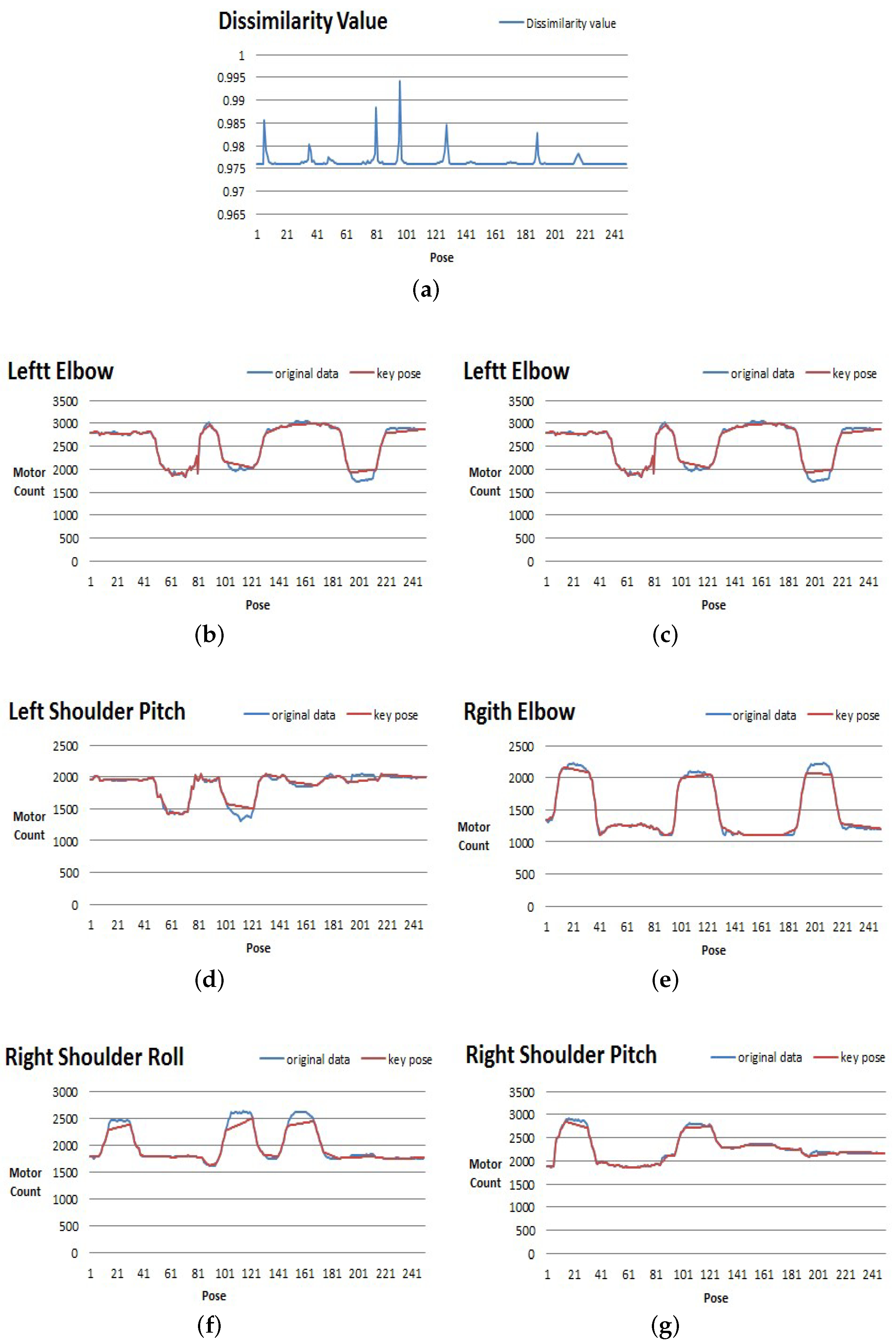
In this paper, we modified formula (
1) into formula (
2) to calculate the dissimilarity of poses so that the errors will be reduced:
where
presents the calculated dissimilarity value,
n is the total number of poses,
is the standard deviation of pose numbered
i,
presents the angle of the joint
j in the pose numbered
i, and
is the average value of different angles of the joint numbered
j in all poses:
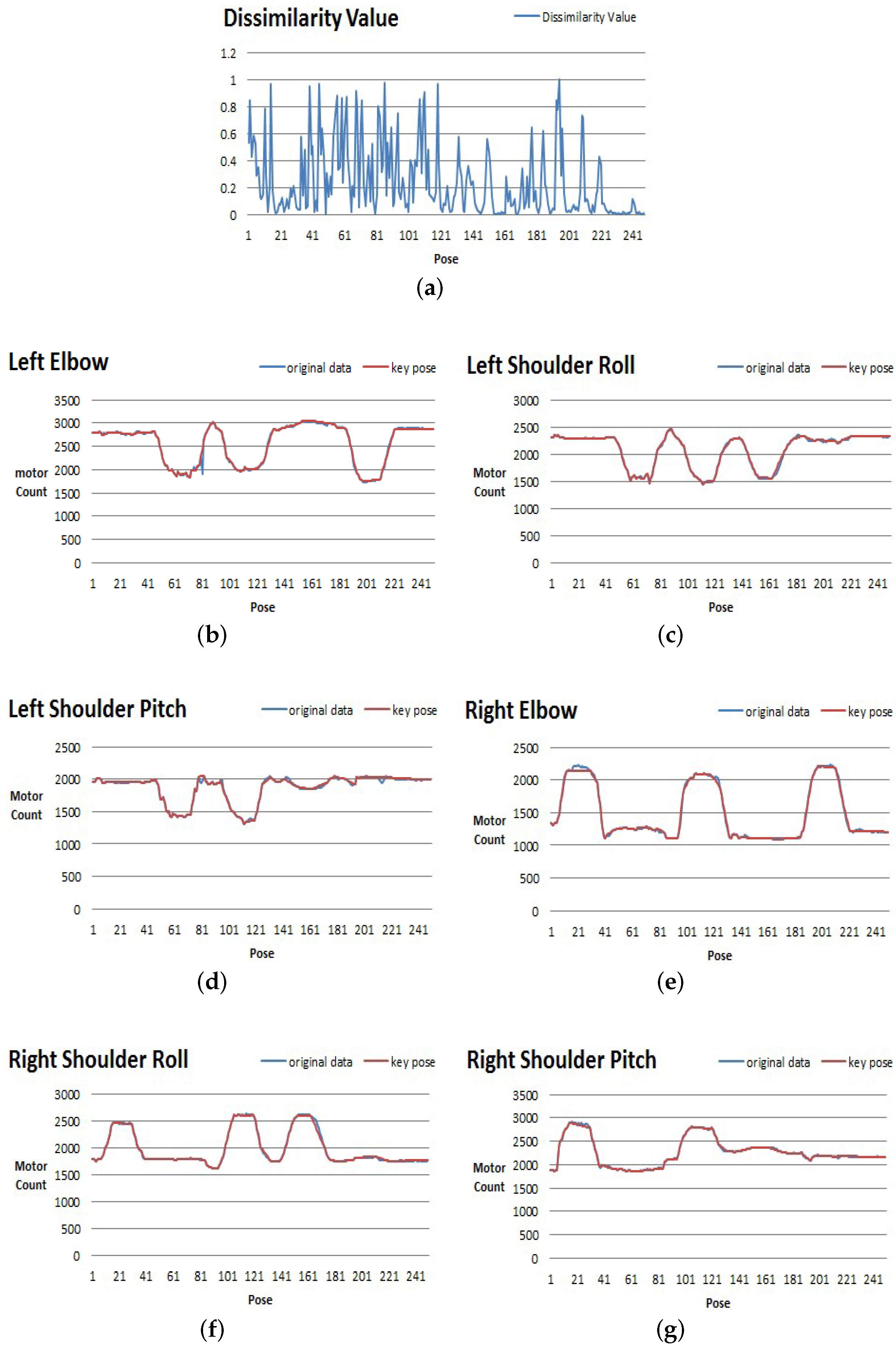
where
presents the calculated dissimilarity value,
N is the total number of joints,
is the standard deviation of changes in values of joints angles of poses numbered
i and
.
is the angle change of poses numbered
i and
in joint
j, and
represents the average of all the variation in joint numbered
j of the poses:
| Algorithm 1 Key-pose detection algorithm. |
- 1:
while not Terminated do - 2:
Calculate Dissimilarity Between Previous Data Via Inverse-Kinematics - 3:
if The Dissimilarity ≥ Threshold then - 4:
CurrentState = ActionState - 5:
else - 6:
CurrentState = StaticState - 7:
end if - 8:
if CurrentState PreState then - 9:
key_pose_bit = 1 - 10:
else - 11:
if the Direction is Changed then - 12:
key_pose_bit = 1 - 13:
else - 14:
key_pose_bit = 0 - 15:
end if - 16:
end if - 17:
Save Data - 18:
end while
|
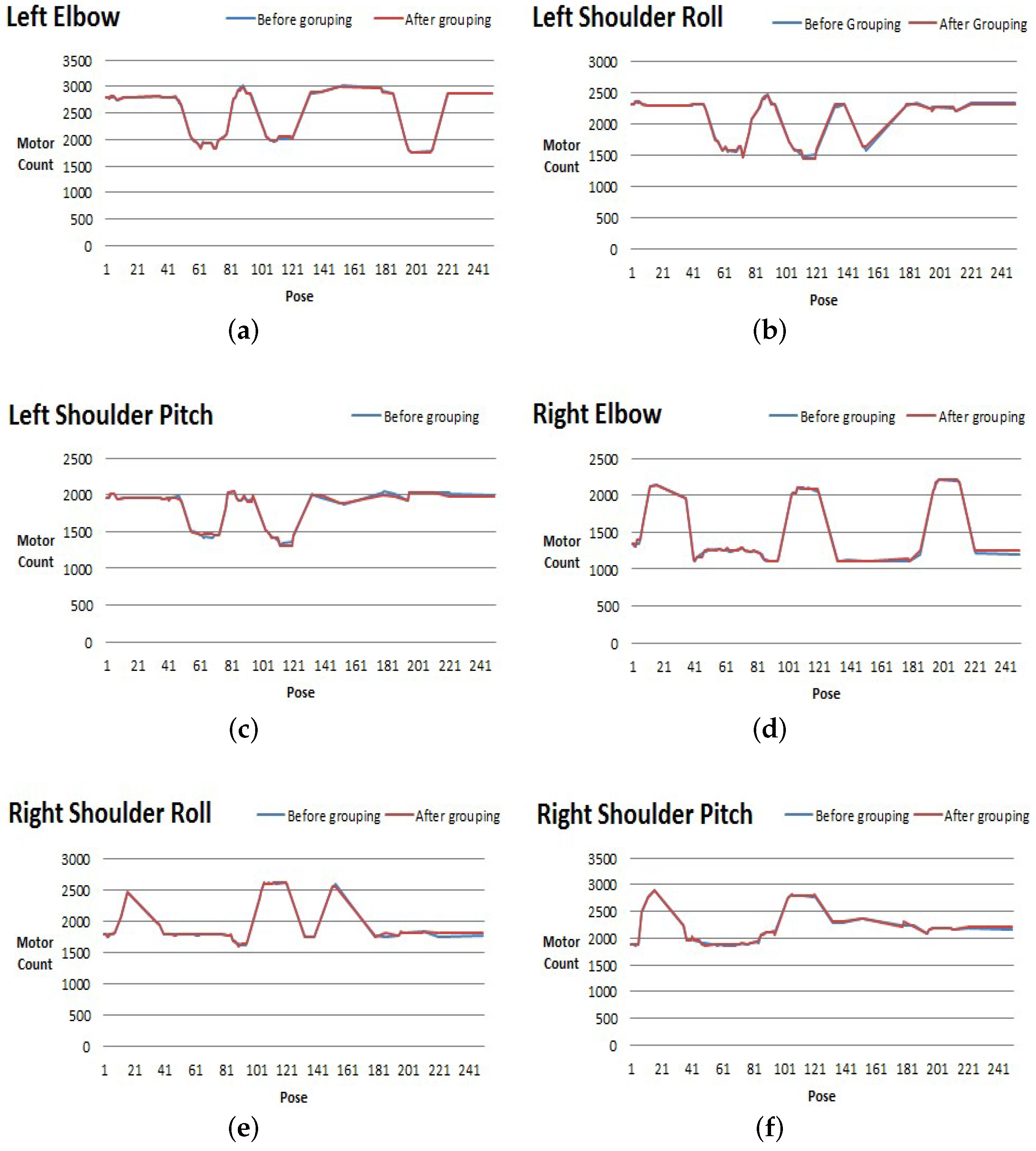
2.2. Clustering Algorithm
The concept of grouping is always used in data mining and many other fields. In our work, grouping is defined as similar to clustering in data mining. With a key-pose detection algorithm, raw data from the RGB-D camera are transformed into data symbolizing essential poses, which are stored by way of motor counts and are less storage-consuming. In this paper, the agglomerative hierarchical clustering algorithm [
15] is applied to the data of key poses to document them. Each pose will be assigned to a group with the group ID, and in this way, the storage load is reduced, and the similarity between actions can be further calculated with such group IDs.
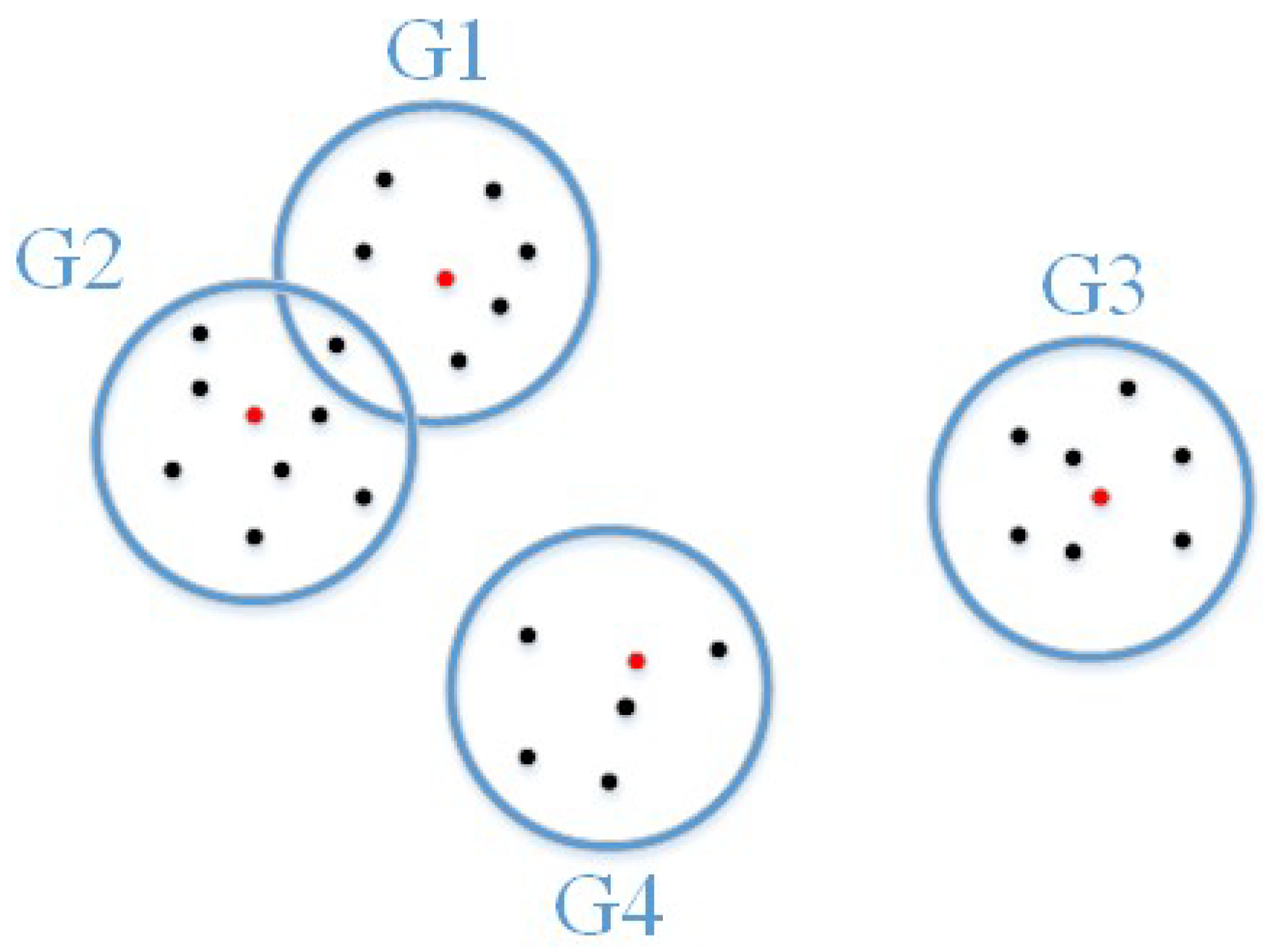
Figure 3 illustrates the changes in groups through the clustering algorithm, where each red dot presents the central point in the group it belongs to. Additionally, due to the geometric position of each red dot, every such dot can represent all the data points in the same group.
The key poses will be divided into several groups after the clustering algorithm, and each group will be assigned a unique group ID. Instead of recording motor counts, each action is stored by recording its group ID.
Table 1 shows the storage space status of the humanoid robot.
Table 2 compares the storage consumption of saving group ID and the storage consumption of saving motor counts. As
Table 2 shows, saving each action by group ID reduces the total storage consumption substantially. In total, 450,000 actions could be saved in the format of group ID, which is over 30 times more than the maximum number of actions saved by recording the motor counts, which is only 13,000, as is shown in
Table 2.
2.3. The Humanoid Robot Functions
2.3.1. Action Emulation
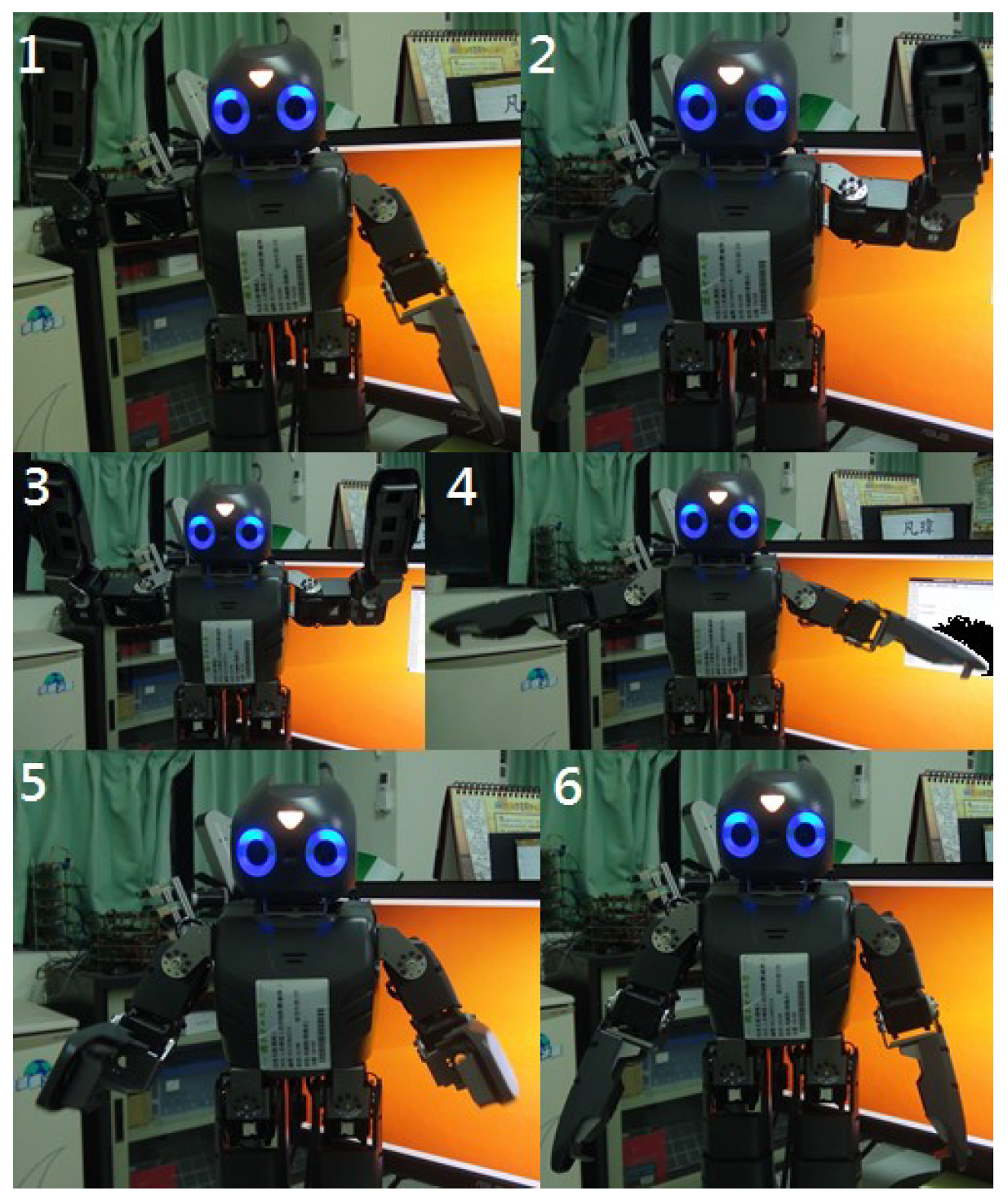
The humanoid robot retrieves the built-in library to find and calls for matched data when it receives processed data from the PC via Wi-Fi to synchronously imitate the user’s actions. Due to the discrepancy between the DOF, degree of freedom, of the humanoid robots’ shoulders, which is 2, and the DOF of the human shoulder, which is 3, humanoid robots cannot achieve complete imitation. In addition, synchronous imitation on the lower body is impossible to be reached due to the following two reasons:
Because of the above two reasons, only upper motors can be applied to synchronous imitation. When imitating lower body poses, some robots’ actions may differ from human actions. For instance, it is hard to find a way to process the raw data generated by the RGB-D camera focusing on a standing user to obtain precise knee joint data. Even if the knee joint data are accurate, chances are that the humanoid robot will fall backward or forward when performing emulation in the lower body due to imbalance.
The humanoid robot unpacks the UDP packets after receiving them from the PC. Then, it calls the functions in its local library and runs the emulation that keeps running until the end of the program.
2.3.2. Action Memorization
In our system, an action is defined as a sequence of many pose frames. As mentioned in the previous paragraph, each pose is assigned a unique group ID after the clustering algorithm. Therefore, each action could consist of a series of group IDs. The action can be compared with the groups’ IDs it concerns this way. To further reduce the storage cost, we propose a method to determine whether the latest received action data are worth being saved locally in the database. When the humanoid robot receives the action data, it checks whether the same data exist in the local database. If the data already exist, the data will be ignored.
When comparing two actions, the discrepancy in the key poses that they could be split into and the discrepancy in the speed of shifting the key poses from one to the other are noted. In our system, discrepancies in speed between actions are ignored when calculating the similarity between two actions because of the high storage cost of recording all the time variables. However, speed differences between actions will still be active when implementing the system. When calculating the similarity of actions, they are compared by the group IDs of the key poses contained by them. Evaluating the similarity of two series of key poses of two actions is characterized as solving the LCS, longest common subsequence, problem in our system. The longest common subsequence (LCS) problem [
16] is the problem of finding the longest subsequence common to all sequences in a set of sequences. A similarity table is established to restore all the similarities. Algorithm 2 is the modified LCS algorithm procedure. The number of the longest common subsequence between two actions will be figured out by the algorithm, and Equation (
3) shows how to calculate the similarity rate with the results of the LCS algorithm:
where
presents how similar the two actions are.
n is the number of segments of the compared actions;
respectively represent the data of action numbered 1 and 2; and
represents the number of LCS.
2.3.3. Action Replay
The robot has to achieve consistency in the representation and speed of the user’s actions. Such consistency can be attained with the help of applying and clustering algorithms, which will minimize the error between the representation and the original action.
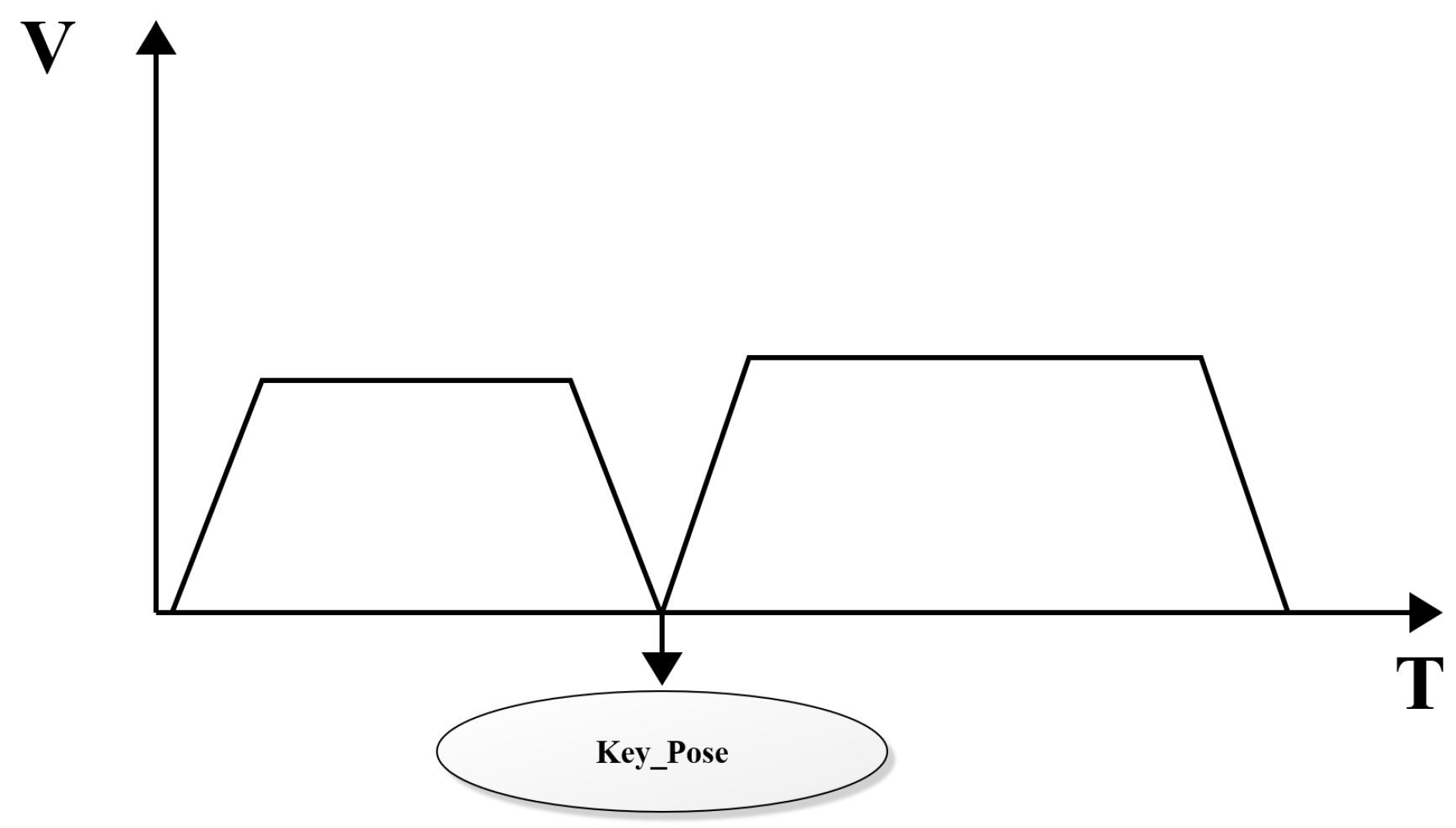
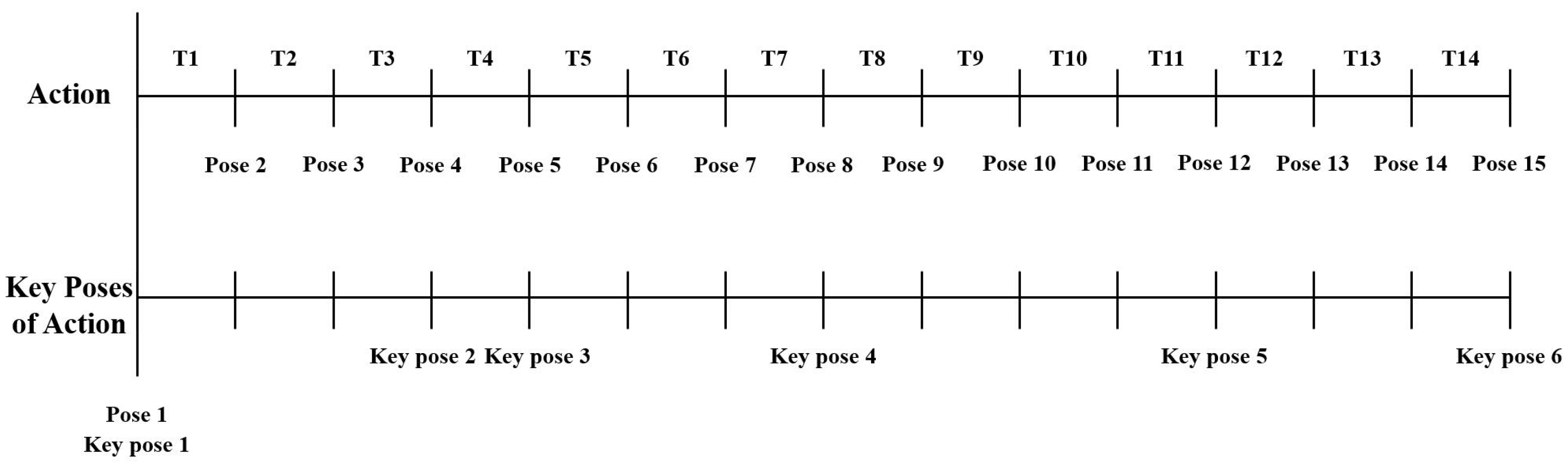
Figure 4 illustrates how to calculate the speech of each action. In
Figure 4, ‘T’ refers to the time consumed. Each elapsed time interval between two key poses is calculated and can be further used to compute the changes in the speed of every joint. As shown in
Figure 5, the elapsed time between the Key Pose labeled 1 and the Key Pose labeled 2 is (T1 + T2 + T3). The speed of the whole action can be calculated with the data from the motor or the number of total key poses.
| Algorithm 2 Revised LCS algorithm. |
- 1:
function() - 2:
for do - 3:
len(i,0) = 0 - 4:
end for - 5:
for do - 6:
len(0,j) = 0 - 7:
end for - 8:
for do - 9:
for do - 10:
Search similarity table - 11:
if then - 12:
len(i,j) = len(i−1,j−1)+1 - 13:
end if - 14:
if len(i−1,j) ≥ len(i,j−1) then - 15:
len(i,j) = len(i−1,j) - 16:
else - 17:
len(i,j) = len(i,j−1) - 18:
end if - 19:
end for - 20:
end for - 21:
end function
|
As is shown in
Figure 4, after taking data consistency and speed variations into account, there still exist standstills in the progress of imitation because the humanoid robot will directly implement the action data without any optimizing processing. Thus the whole action played by the robot seems to be not natural.
Figure 4.
Continuous motion interrupt diagram.
Figure 4.
Continuous motion interrupt diagram.
Figure 5.
Relation of poses and key poses.
Figure 5.
Relation of poses and key poses.
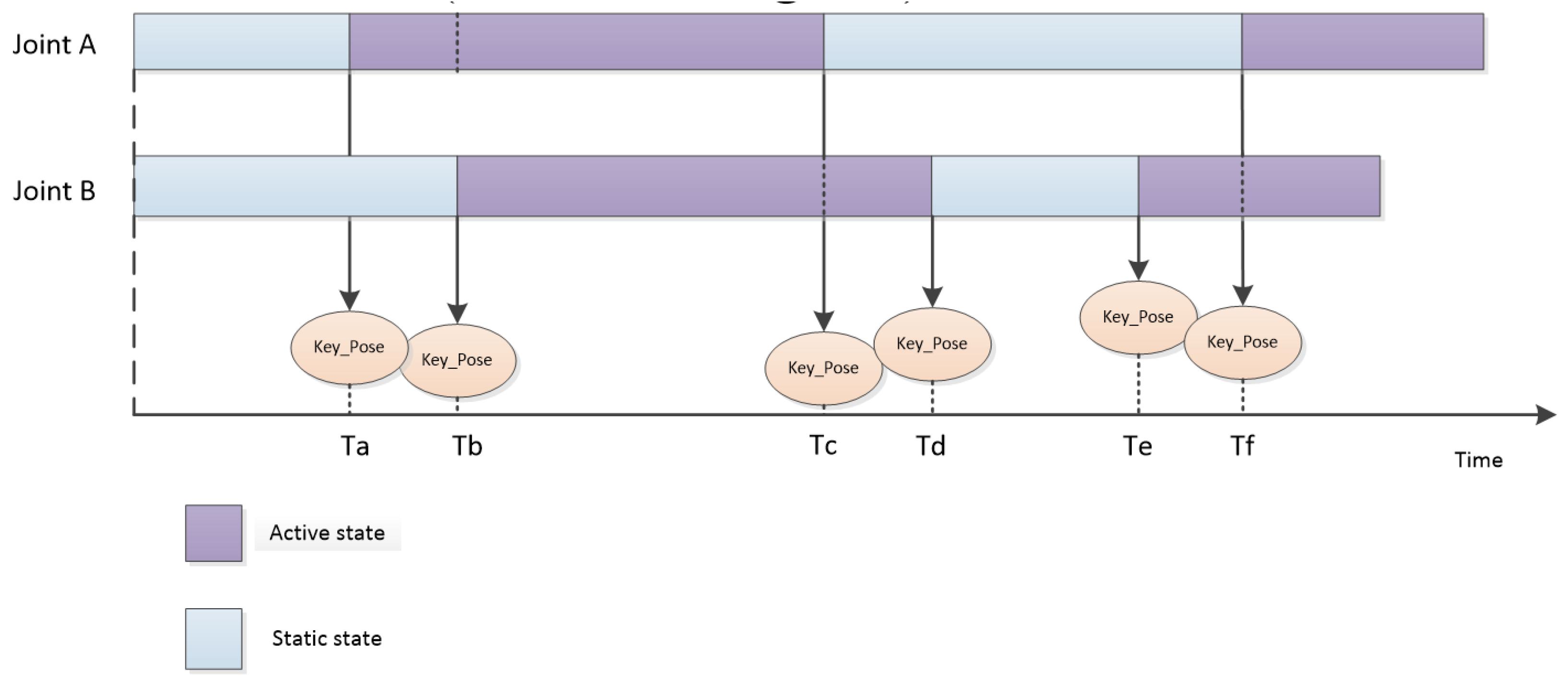
To solve the problem, a ‘continuous bit’ is added to the program. It is proposed to symbolize whether the state of the robot is active or not. The continuous bit is either 0 or 1. In the program, the speed of each joint is checked. If it is stable, implying that all the velocities of the joints are 0, the continuous bit will be set as 0, meaning that the robot is in a static state; otherwise, if there still exists any joint that is constantly moving, the continuous bit will be set as 1, meaning that the robot is in an active state, as is shown in
Figure 6.
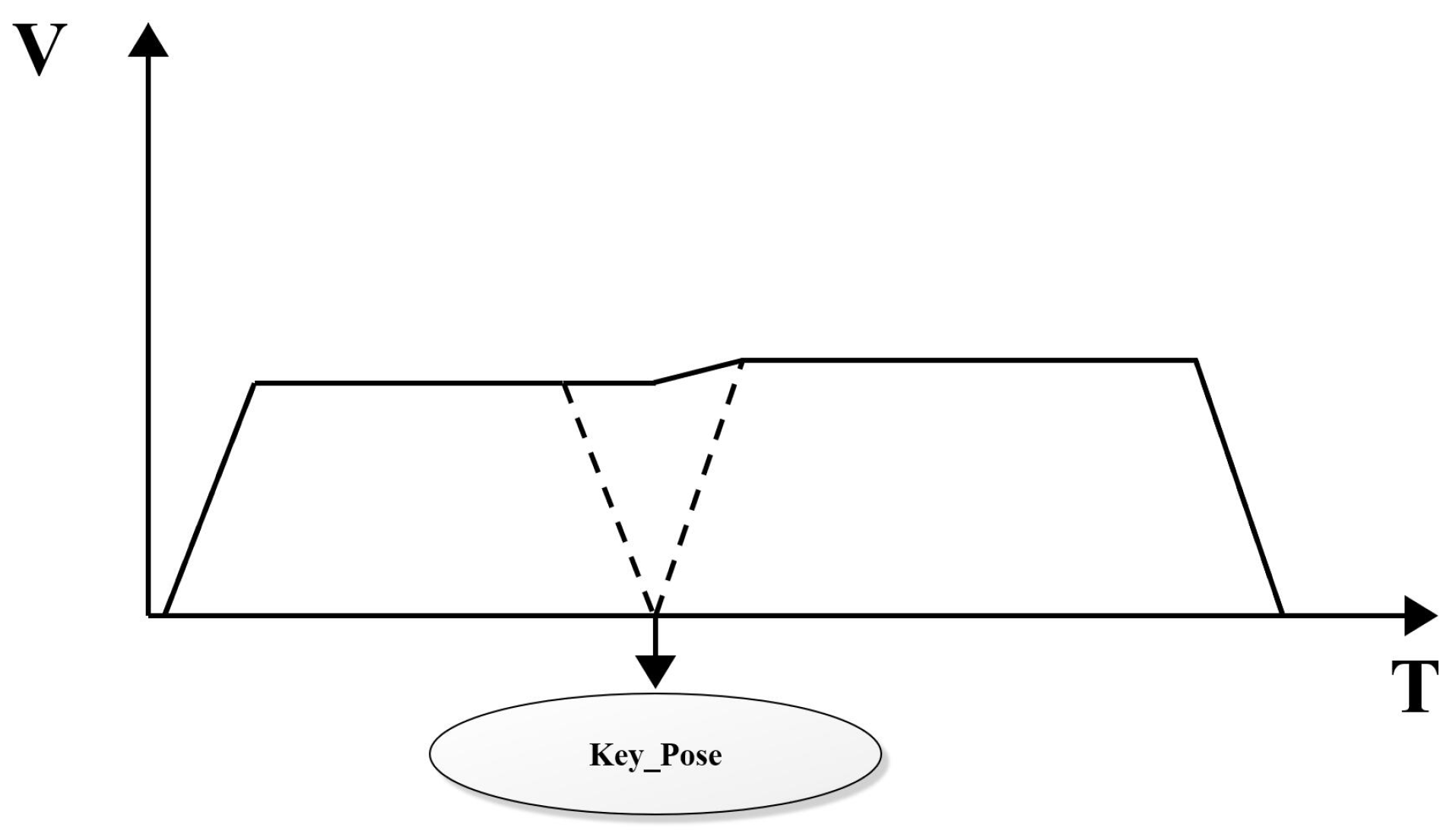
The continuous bit is used to enable the robot to perform the actions smoothly. If the current continuous bit is 1, the number of each motor count will add or remove a constant so that the motor will keep its speed and direction for a while after reaching its original goal position. The current motor count is continuously checked to ensure the accuracy of the action. The actual goal position of each pose may be changed because of the functions of the continuous bit. However, once the check and a particular pose are done, the motors on the robot will return to the original goal position or move to the next goal position. In this way, each motor will not halt when the robot reads the next key pose while the accuracy is ensured, as shown in
Figure 7.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}