

Adaptive Load Incremental Step in Large Increment Method for Elastoplastic Problems

Abstract
:
1. Introduction
2. LIM for Elastoplastic Material Problems
2.1. Governing Equations in LIM
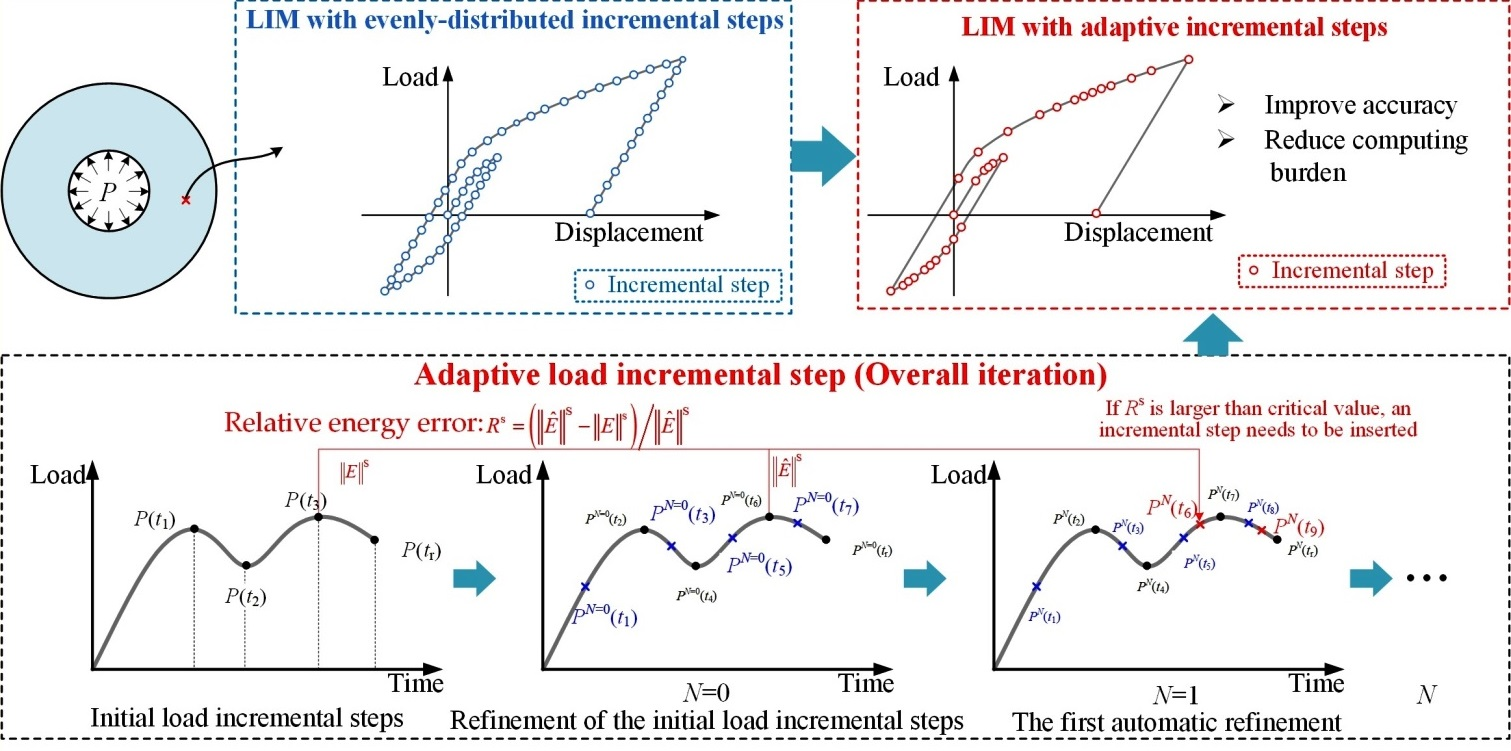
2.2. Overall Procedure of LIM
- Step 1: Compute initial force vectors.
- Step 2: Iterate from Fn(tj) to Fn+1(tj).
- Step 3: Compute the final results.
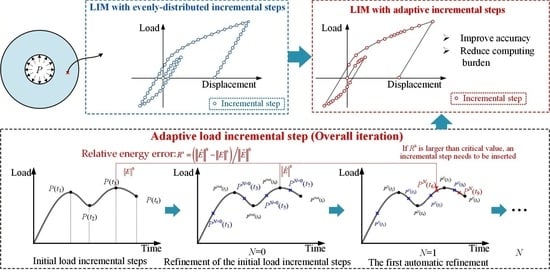
3. Adaptive Load Incremental Step Strategy in LIM
3.1. Posteriori Error Estimation
3.2. Adaptive Load Incremental Step Procedure of LIM
- Step 1: Compute energy error for each initial incremental step.
- Step 2: Refine incremental steps.
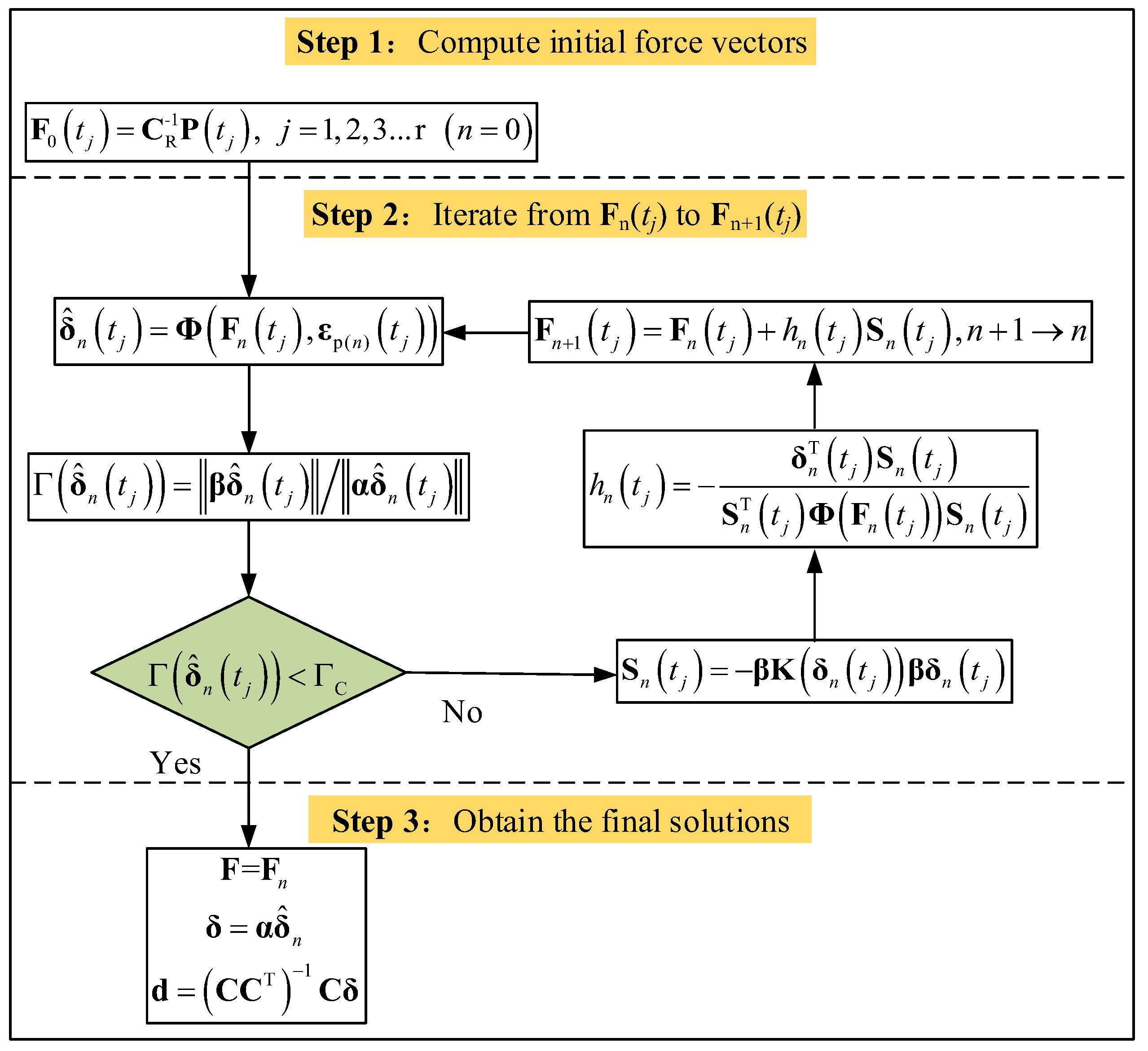
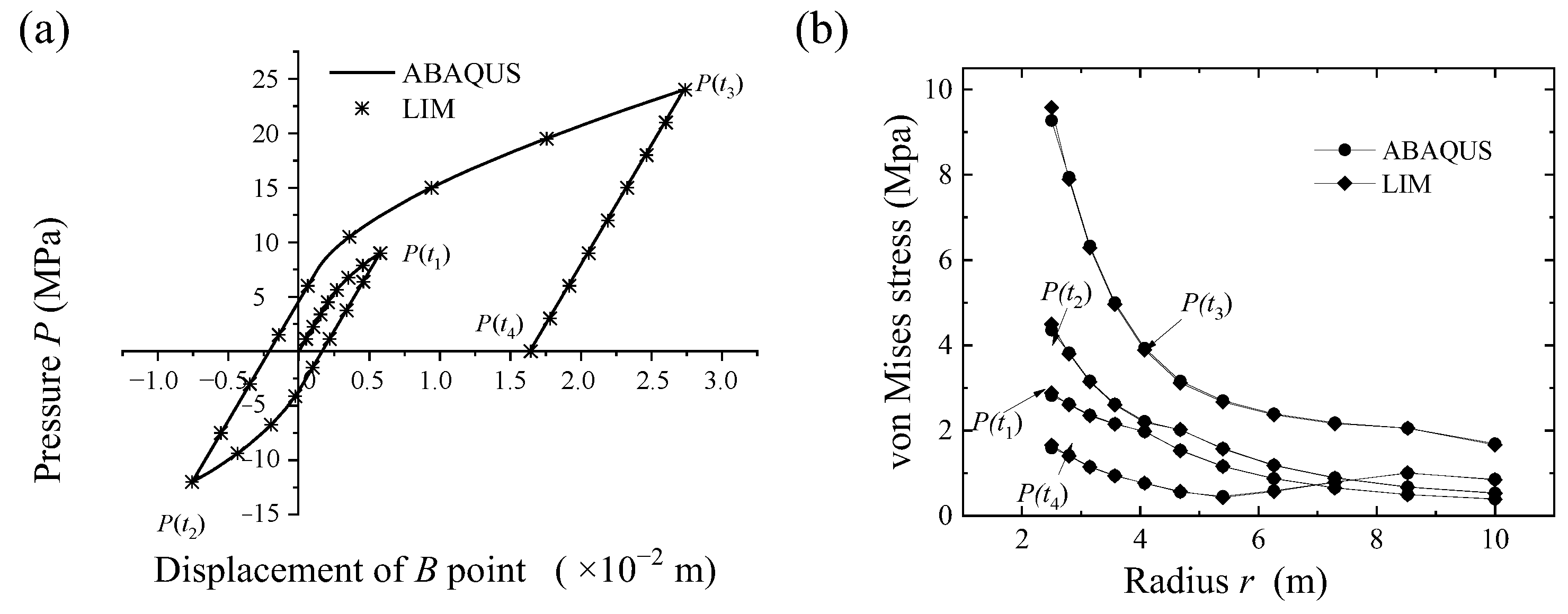
4. Numerical Example and Discussion
5. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. The 2D Thick Wall Cylinder under Monotonic Pressure Using Element Type of CPS4S5


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RC | Adaptive Method | Evenly-Distributed Method | ||||
|---|---|---|---|---|---|---|
| Number of Incremental Steps r | Maximum Stress Error (%) | Computing Time (s) | Number of Incremental Steps r | Maximum Stress Error (%) | Computing Time (s) | |
| 0.05 | 23 | 0.179 | 54 | 4 | 0.940 | 8 |
| 0.01 | 52 | 0.070 | 70 | 8 | 0.535 | 16 |
| 0.009 | 54 | 0.068 | 130 | 16 | 0.298 | 36 |
| 0.008 | 64 | 0.047 | 150 | 32 | 0.148 | 119 |
| 0.007 | 70 | 0.043 | 165 | 64 | 0.070 | 264 |
| 0.006 | 84 | 0.036 | 210 | 128 | 0.036 | 810 |
References
- Molina, A.; Curiel-Sosa, J.L. A multiscale finite element technique for nonlinear multi-phase materials. Finite Elem. Anal. Des. 2015, 94, 64–80. [Google Scholar] [CrossRef] [Green Version]
- Zienkiewicz; Taylor, R.C. The Finite Element Method; McGraw Hill: New York, NY, USA, 1989. [Google Scholar]
- Arkov, D.P.; Kochetkova, O.V.; Gureeva, N.A.; Matveyev, A.S.; Shiryaeva, E.V. Simulation of the stress-strain state of shells under internal pressure using the mixed finite element method, taking into account physical nonlinearity. IOP Conf. Ser. Mater. Sci. Eng. 2020, 873, 012032. [Google Scholar] [CrossRef]
- Du, X.; Dang, S.; Yang, Y.; Chai, Y. The Finite Element Method with High-Order Enrichment Functions for Elastodynamic Analysis. Mathematics 2022, 10, 4595. [Google Scholar] [CrossRef]
- Xu, Y.; Li, H.; Chen, L.; Zhao, J.; Zhang, X. Monte Carlo Based Isogeometric Stochastic Finite Element Method for Uncertainty Quantization in Vibration Analysis of Piezoelectric Materials. Mathematics 2022, 10, 1840. [Google Scholar] [CrossRef]
- Simo, J.C.; Hughes, T.J.R. Computational Inelasticity; Springer: Berlin/Heidelberg, Germany, 1997. [Google Scholar]
- Chen, H. Elasticity and Plasticity; China Architecture & Building: Beijing, China, 2005. [Google Scholar]
- Cook, R.D.; Malkus, D.S.; Plesha, M.E. Concepts and Applications of Finite Element Analysis; Wiley: Hoboken, NJ, USA, 1989. [Google Scholar]
- Tracey, D.M.; Freese, C.E. Adaptive load incrementation in elastic-plastic finite element analysis. Comput. Struct. 1981, 13, 45–53. [Google Scholar] [CrossRef]
- Abbo, A.J.; Sloan, S. An automatic load stepping algorithm with error control. Int. J. Numer. Methods Eng. 1996, 39, 1737–1759. [Google Scholar] [CrossRef]
- Fernandes, M.; Cardoso, C.O.; Mansur, W.J. An adaptive load stepping algorithm for path-dependent problems based on estimated convergence rates. Comput. Model. Eng. Sci. 2017, 113, 325–342. [Google Scholar]
- Zahavi, E. The Finite Element Method in Machine Design; Prentice Hall: Hoboken, NJ, USA, 1992. [Google Scholar]
- Bathe, K.J. Finite Element Procedures; Klaus-Jurgen Bathe: Cambridge, MA, USA, 2006. [Google Scholar]
- Kaljevi, I.; Patnaik, S.N.; Hopkins, D.A. Development of finite elements for two-dimensional structural analysis using the integrated force method. Comput. Struct. 1996, 59, 691–706. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Liu, X. A large increment method for material nonlinearity problems. Adv. Struct. Eng. 1997, 1, 99–110. [Google Scholar] [CrossRef]
- Neuenhofer, A.; Filippou, F.C. Geometrically nonlinear flexibility-based frame finite element. J. Struct. Eng. 1998, 124, 704–711. [Google Scholar] [CrossRef]
- Santos, H. Variationally consistent force-based finite element method for the geometrically non-linear analysis of Euler–Bernoulli framed structures. Finite Elem. Anal. Des. 2012, 53, 24–36. [Google Scholar] [CrossRef]
- Barham, W.; Aref, A.J.; Dargush, G.F. Development of the large increment method for elastic perfectly plastic analysis of plane frame structures under monotonic loading. Int. J. Solids Struct. 2005, 42, 6586–6609. [Google Scholar] [CrossRef] [Green Version]
- Barham, W.S.; Aref, A.J.; Dargush, G.F. Flexibility-based large increment method for analysis of elastic–perfectly plastic beam structures. Comput. Struct. 2005, 83, 2453–2462. [Google Scholar] [CrossRef]
- Barham, W.; Aref, A.; Dargush, G. On the elastoplastic cyclic analysis of plane beam structures using a flexibility-based finite element approach. Int. J. Solids Struct. 2008, 45, 5688–5704. [Google Scholar] [CrossRef] [Green Version]
- Barham, W.S.; Idris, A.A. Flexibility-based large increment method for nonlinear analysis of Timoshenko beam structures controlled by a bilinear material model. Structures 2021, 30, 678–691. [Google Scholar] [CrossRef]
- Aref, A.J.; Guo, Z.Y. Framework for finite-element-based large increment method for nonlinear structural problems. J. Eng. Mech. -Asce 2001, 127, 739–746. [Google Scholar] [CrossRef]
- Jia, H.-x. Large increment method for elastic and elastoplastic analysis of plates. Finite Elem. Anal. Des. 2014, 88, 16–24. [Google Scholar] [CrossRef]
- JIa, X.; Long, D.; Liu, X. Development of the Large Increment Method in Analysis for Thin and Moderately Thick Plates. J. Shanghai Jiaotong Univ. 2014, 19, 265–273. [Google Scholar] [CrossRef]
- JIa, X.; Liu, X. Force-Based Quadrilateral Plate Bending Element for Plate Using Large Increment Method. J. Donghua Univ. 2015, 32, 345–350. [Google Scholar] [CrossRef]
- Bordas; Alain, S.P. An element nodal force-based large increment method for elastoplacisity. AIP Conf. Proc. 2010, 1233, 1401–1405. [Google Scholar]
- Ben-Israel, A.; Greville, T. Generalized Inverse: Theory and Application; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1974. [Google Scholar]
- Press, W.H.; Flannery, B.P.; Teukolsky, S.A.; Vetterling, W.T. Numerical Recipes in C: The Art of Scientific Computing; University Press: Cambridge, UK, 1989. [Google Scholar]
- Zienkiewicz, O.C.; Zhu, J.Z. A simple error estimator and adaptive procedure for practical engineerng analysis. Int. J. Numer. Methods Eng. 1987, 24, 337–357. [Google Scholar] [CrossRef]
- Guo, Z.Y.; Zhao, Y.J.; Chen, Z.H.; Liao, M.M.; Li, Z.L.; Liu, B. A Mesh Adaptive Procedure for Large Increment Method. Int. J. Appl. Mech. 2015, 7, 1550061. [Google Scholar] [CrossRef]
- Long, D.; Liu, X. Development of 2D Hybrid Equilibrium Elements in Large Increment Method. J. Shanghai Jiaotong Univ. 2013, 18, 205–215. [Google Scholar] [CrossRef]







| RC | Adaptive Method | Evenly-Distributed Method | ||||
|---|---|---|---|---|---|---|
| Number of Incremental Steps r | Maximum Stress Error (%) | Computing Time (s) | Number of Incremental Steps r | Maximum Stress Error (%) | Computing Time (s) | |
| 0.03 | 58 | 1.361 | 150 | 8 | 4.214 | 12 |
| 0.02 | 88 | 1.270 | 296 | 16 | 2.905 | 54 |
| 0.01 | 168 | 0.412 | 516 | 32 | 2.173 | 127 |
| 0.009 | 188 | 0.377 | 566 | 64 | 1.427 | 322 |
| 0.008 | 210 | 0.353 | 610 | 128 | 0.678 | 902 |
| 0.007 | 228 | 0.131 | 650 | 256 | 0.327 | 4650 |
| 0.006 | 306 | 0.109 | 905 | 512 | 0.184 | 13,521 |
| Refinement Number N | Incremental Steps r | Initial Compatibility Error Γ(δ) | Number of Iterations n | ||
|---|---|---|---|---|---|
| Special Solutions F0 | Refined Solutions | Special Solutions F0 | Refined Solutions | ||
| 1 | 8 | 0.235 | 0.045 | 27 | 22 |
| 2 | 16 | 0.235 | 0.048 | 29 | 25 |
| 3 | 32 | 0.235 | 0.018 | 31 | 23 |
| 4 | 64 | 0.235 | 0.008 | 38 | 30 |
| 5 | 128 | 0.235 | 0.006 | 36 | 21 |
| 6 | 256 | 0.235 | 0.0002 | 37 | 25 |
| 7 | 512 | 0.235 | 0.0001 | 48 | 17 |
| 8 | 1024 | 0.235 | 0.00005 | 111 | 14 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cui, B.; Zhang, J.; Ma, Y. Adaptive Load Incremental Step in Large Increment Method for Elastoplastic Problems. Mathematics 2023, 11, 524. https://doi.org/10.3390/math11030524
Cui B, Zhang J, Ma Y. Adaptive Load Incremental Step in Large Increment Method for Elastoplastic Problems. Mathematics. 2023; 11(3):524. https://doi.org/10.3390/math11030524
Chicago/Turabian StyleCui, Baorang, Jingxiu Zhang, and Yong Ma. 2023. "Adaptive Load Incremental Step in Large Increment Method for Elastoplastic Problems" Mathematics 11, no. 3: 524. https://doi.org/10.3390/math11030524