
A Combined Runs Rules Scheme for Monitoring General Inflated Poisson Processes


Abstract
:1. Introduction
2. The r-Geometrically Inflated Poisson Distribution
3. The Proposed Monitoring Scheme
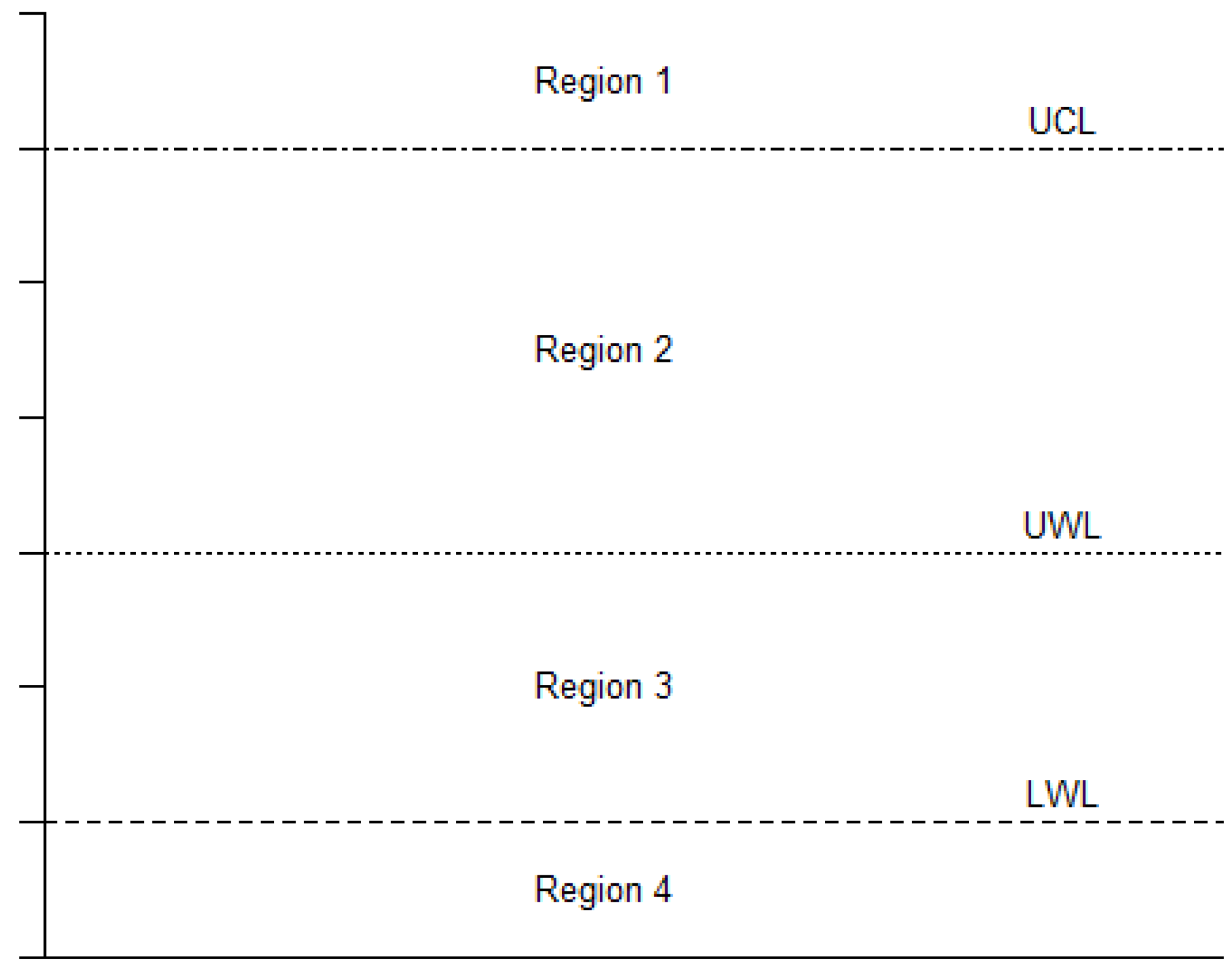
3.1. Operation of the Proposed Monitoring Scheme
- i.
- A single value is beyond an upper control limit (Region 1);
- ii.
- l-out-of-m successive values are in the interval (Region 2) with the intermediate values being in the interval (Region 3);
- iii.
- k successive values are in the interval (Region 4);
3.2. Performance of the Proposed Monitoring Scheme
4. Numerical Results
- ▪
- Scenario 1: and
- ▪
- Scenario 2: and

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | Combined | |||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 65.31 2, 6, 7, 10 | 64.89 2, 6, 7, 10 | 59.30 2, 5, 8, 9 | 58.76 2, 5, 8, 9 | 61.34 2, 3, 10, 11 | 64.19 2, 3, 12, 8 | 63.94 2, 3, 7, 10 | 142.59 7, 4 |
| 2 | 68.67 1, 4, 5, 8 | 68.16 1, 4, 5, 8 | 64.57 1, 3, 6, 8 | 63.92 1, 3, 6, 8 | 67.95 1, 3, 5, 8 | 69.72 1, 3, 5, 8 | 68.53 1, 2, 5, 8 | 84.88 5, 4 |
| 3 | 134.41 1, 3, 6, 14 | 64.67 1, 3, 9, 9 | 63.47 1, 3, 11, 9 | 87.35 1, 4, 6, 10 | 76.26 1, 3, 7, 8 | 74.22 1, 2, 7, 8 | 90.79 1, 2, 7, 8 | 130.75 6, 5 |
| 4 | 64.39 3, 7, 10, 9 | 50.53 4, 6, 11, 15 | 51.31 4, 6, 12, 15 | 51.17 4, 6, 12, 15 | 51.56 4, 5, 10, 14 | 54.06 4, 5, 9, 15 | 56.68 3, 4, 9, 10 | 144.35 9, 4 |
| 5 | 78.45 1, 2, 6, 25 | 127.77 1, 3, 7, 21 | 94.11 0, 2, 6, 19 | 93.71 0, 2, 6, 19 | 116.05 3, 4, 6, 49 | 116.44 3, 4, 6, 49 | 116.45 3, 4, 6, 49 | 95.68 5, 17 |
| 6 | 42.13 0, 1, 14, 43 | 42.17 0, 1, 13, 45 | 42.16 0, 1, 13, 45 | 42.17 0, 1, 13, 45 | 137.79 7, 8, 13, 50 | 143.94 3, 4, 9, 45 | 144.82 7, 8, 13, 50 | 413.46 10, 27 |
| Case | Combined | |||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 46.17 2, 5, 7, 11 | 44.67 2, 6, 7, 10 | 40.29 2, 5, 8, 9 | 39.84 2, 5, 8, 9 | 38.92 2, 3, 10, 11 | 43.07 2, 3, 7, 11 | 43.46 2, 3, 7, 10 | 104.55 7, 4 |
| 2 | 48.90 1, 4, 5, 8 | 48.32 1, 4, 5, 8 | 43.39 1, 3, 6, 8 | 42.86 1, 3, 6, 8 | 47.71 1, 2, 7, 9 | 49.89 1, 3, 5, 8 | 48.76 1, 2, 5, 8 | 60.22 5, 4 |
| 3 | 101.20 1, 3, 6, 14 | 43.21 1, 3, 9, 9 | 42.83 1, 3, 11, 9 | 61, 64 1, 4, 6, 10 | 52.69 1, 3, 7, 8 | 48.28 1, 2, 7, 8 | 131.31 1, 2, 7, 8 | 100.17 6, 5 |
| 4 | 46.58 3, 7, 10, 9 | 34.15 4, 6, 11, 15 | 34.58 4, 6, 12, 15 | 34.47 4, 6, 12, 15 | 34.72 4, 5, 10, 14 | 37.15 4, 5, 9, 15 | 39.54 3, 4, 9, 10 | 141.35 9, 4 |
| 5 | 58.78 1, 2, 6, 25 | 85.73 1, 3, 5, 24 | 85.23 1, 3, 5, 24 | 85.11 1, 3, 5, 24 | 95.02 3, 4, 6, 49 | 94.99 3, 4, 6, 49 | 95.05 3, 4, 6, 49 | 269.10 5, 17 |
| 6 | 27.17 0, 1, 14, 43 | 26.50 0, 1, 13, 45 | 26.49 0, 1, 13, 45 | 26.49 0, 1, 13, 45 | 116.18 7, 8, 13, 50 | 90.86 0, 1, 14, 23 | 118.89 7, 8, 13, 50 | 6091.24 10, 27 |
5. Examples
5.1. Monitoring the Daily Number of Unintentional Needle-Stick Occurrences
5.2. Monitoring the Monthly Number of Poliomyelitis Cases
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Page, E.S. Continuous inspection schemes. Biometrika 1954, 41, 100–115. [Google Scholar] [CrossRef]
- Roberts, S.W. Control chart tests based on geometric moving averages. Technometrics 1959, 1, 239–250. [Google Scholar] [CrossRef]
- Montgomery, D.C. Introduction to Statistical Quality Control, 8th ed.; John Wiley & Sons: New York, NY, USA, 2020. [Google Scholar]
- Bersimis, S.; Koutras, M.V.; Rakitzis, A.C. Run and scan rules in statistical process monitoring. In Handbook of Scan Statistics; Glaz, J., Koutras, M., Eds.; Springer: New York, NY, USA, 2020. [Google Scholar] [CrossRef]
- Jalilibal, Z.; Karavigh, M.H.A.; Amiri, A.; Khoo, M.B.C. Run rules schemes for statistical process monitoring: A literature review. Qual. Technol. Quant. Manag. 2023, 20, 21–52. [Google Scholar] [CrossRef]
- Johnson, N.L.; Kemp, A.W.; Kotz, S. Univariate Discrete Distributions, 3rd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2005. [Google Scholar]
- Yoneda, K. Estimations in some modified Poisson distributions. Yokohama Math. J. 1962, 10, 73–96. [Google Scholar]
- Murat, M.; Snyzal, D. Non-zero inflated modified power series distributions. Commun. Stat.-Theory Methods 1998, 27, 3047–3064. [Google Scholar] [CrossRef]
- Melkersson, M.; Rooth, D.O. Modeling female fertility using inflated count data models. J. Popul. Econ. 2000, 13, 189–203. [Google Scholar] [CrossRef]
- Lin, T.H.; Tsai, M.H. Modeling health survey data with excessive zero and K responses. Stat. Med. 2013, 32, 1572–1583. [Google Scholar] [CrossRef]
- Tang, Y.; Liu, W.; Xu, A. Statistical inference for zero-and-one inflated Poisson models. Stat. Theory Relat. Fields 2017, 1, 216–226. [Google Scholar] [CrossRef]
- Sun, Y.; Zhao, S.; Tian, G.L.; Tang, M.L.; Li, T. Likelihood-based methods for the zero-one-two inflated Poisson model with applications to biomedicine. J. Stat. Comput. Simul. 2023, 93, 956–982. [Google Scholar] [CrossRef]
- Begum, A.; Mallick, A.; Pal, N. A generalized inflated Poisson distribution with application to modeling fertility data. Thail. Stat. 2014, 12, 135–139. [Google Scholar]
- Rakitzis, A.C.; Castagliola, P.; Maravelakis, P.E. A two-parameter general inflated Poisson distribution: Properties and applications. Stat. Methodol. 2016, 29, 32–50. [Google Scholar] [CrossRef]
- Mahmood, T.; Xie, M. Models and monitoring of zero-inflated processes: The past and current trends. Qual. Reliab. Eng. Int. 2019, 35, 2540–2557. [Google Scholar] [CrossRef]
- Paulino, S.; Morais, M.C.; Knoth, S. An ARL-unbiased c-chart. Qual. Reliab. Eng. Int. 2016, 32, 2847–2858. [Google Scholar] [CrossRef]
- Nelson, L.S. Supplementary runs tests for np control charts. J. Qual. Technol. 1997, 29, 225–227. [Google Scholar] [CrossRef]
- Acosta-Mejia, C.A. Improved p charts to monitor process quality. IIE Trans. 1999, 31, 509–516. [Google Scholar] [CrossRef]
- Lucas, J.M.; Davis, D.J.; Saniga, E.M. Detecting improvement using Shewhart attribute control charts when the lower control limit is zero. IIE Trans. 2006, 38, 699–709. [Google Scholar] [CrossRef]
- Chang, T.C.; Gan, F.F. Modified Shewhart charts for high yield processes. J. Appl. Stat. 2007, 34, 857–877. [Google Scholar] [CrossRef]
- Mamzeridou, E.; Rakitzis, A.C. Synthetic-type control charts for monitoring general inflated Poisson processes. Commun. Stat.-Simul. Comput. 2022, in press. [Google Scholar] [CrossRef]
- Rakitzis, A.C.; Castagliola, P.; Maravelakis, P.E. Cumulative sum control charts for monitoring geometrically inflated Poisson processes: An application to infectious disease counts data. Stat. Methods Med. Res. 2018, 27, 622–641. [Google Scholar] [CrossRef] [PubMed]
- Woodall, W.H.; Adams, B.M.; Benneyan, J.C. The use of control charts in healthcare. In Statistical Methods in Healthcare; Faltin, F.W., Kenett, R.S., Ruggeri, F., Eds.; John Wiley & Sons: Oxford, UK, 2012; pp. 251–267. [Google Scholar]
- Reynolds, M.R., Jr. The Bernoulli CUSUM chart for detecting decreases in a proportion. Qual. Reliab. Eng. Int. 2013, 29, 529–534. [Google Scholar] [CrossRef]
- Bourke, P.D. Detecting a downward shift in a proportion using a geometric CUSUM chart. Qual. Eng. 2020, 32, 75–90. [Google Scholar] [CrossRef]
- Chakraborti, S.; Kumar, N.; Rakitzis, A.C.; Sparks, R.S. Time between events monitoring with control charts. In Wiley StatsRef: Statistics Reference Online; Balakrishnan, N., Colton, T., Everitt, B., Piegorsch, W., Ruggeri, F., Teugels, J.L., Eds.; John Wiley & Sons: Hoboken, NJ, USA, 2023; pp. 1–13. [Google Scholar]
- Fu, J.C.; Koutras, M.V. Distribution theory of runs: A Markov chain approach. J. Am. Stat. Assoc. 1994, 89, 1050–1058. [Google Scholar] [CrossRef]
- Fu, J.C.; Lou, W.W. Distribution Theory of Runs and Patterns and Its Applications: A Finite Markov Chain Imbedding Approach, 1st ed.; World Scientific: Singapore, 2003. [Google Scholar]
- Fu, J.C.; Shmueli, G.; Chang, Y.M. A unified Markov chain approach for computing the run length distribution in control charts with simple or compound rules. Stat. Probab. Lett. 2003, 65, 457–466. [Google Scholar] [CrossRef]
- Machado, M.A.G.; Costa, A.F.B. A side-sensitive synthetic chart combined with an X chart. Int. J. Prod. Res. 2014, 52, 3404–3416. [Google Scholar] [CrossRef]
- Mukherjee, A.; Sen, R. Optimal design of Shewhart-Lepage type schemes and its application in monitoring service quality. Eur. J. Oper. Res. 2018, 266, 147–167. [Google Scholar] [CrossRef]
- Fatahi, A.A.; Noorossana, R.; Dokouhaki, P. Zero inflated Poisson EWMA control chart for monitoring rare health-related events. J. Mech. Med. Biol. 2012, 12, 1250065. [Google Scholar] [CrossRef]
- Aly, A.A.; Saleh, N.A.; Mahmoud, M.A. An adaptive EWMA control chart for monitoring zero-inflated Poisson processes. Commun. Stat.-Simul. Comput. 2022, 51, 1564–1577. [Google Scholar] [CrossRef]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2023; Available online: https://www.r-project.org/ (accessed on 29 September 2023).




| Scheme | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|
| l | 2 | 2 | 2 | 2 | 3 | 4 | 5 |
| m | 2 | 3 | 4 | 5 | 4 | 5 | 5 |
| Notation |
| Case | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| 2.1442 | 1.3091 | 1.3170 | 2.6250 | 0.4000 | 0.6000 |
| Scheme | SH | Combined | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.5 | 1.5 | 0.70 | 1.3092 | 0.61 | 18.72 | 3 | 6 | 10 | 14 | 51.84 | 173.69 | ||
| 0.8 | 0.5 | 1.5 | 0.56 | 1.3096 | 0.61 | 19.07 | 2 | 3 | 15 | 8 | 51.89 | 173.11 | ||
| 1.1 | 0.5 | 1.5 | 0.77 | 1.3260 | 0.62 | 17.73 | 3 | 6 | 10 | 14 | 54.06 | 184.28 | ||
| 0.6 | 0.5 | 1.5 | 0.42 | 1.3414 | 0.63 | 19.63 | 2 | 3 | 15 | 8 | 56.87 | 194.78 | ||
| 1.1 | 0.8 | 2.4 | 0.77 | 1.7376 | 0.81 | 34.07 | 3 | 6 | 10 | 14 | 100.60 | 261.13 | ||
| 1 | 0.8 | 2.4 | 0.70 | 1.8102 | 0.84 | 42.90 | 3 | 6 | 10 | 14 | 111.30 | 258.62 | ||
| 0.8 | 0.8 | 2.4 | 0.56 | 1.9514 | 0.91 | 63.42 | 3 | 6 | 10 | 14 | 145.35 | 264.59 | ||
| 1.1 | 1 | 3 | 0.77 | 2.0119 | 0.94 | 65.00 | 3 | 6 | 10 | 14 | 126.47 | 140.21 | ||
| 0.6 | 0.8 | 2.4 | 0.42 | 2.0835 | 0.97 | 85.58 | 3 | 6 | 10 | 14 | 208.52 | 276.92 | ||
| 1 | 1 | 3 | 0.70 | 2.1442 | 1.00 | 150.89 | 149.31 | 125.37 | ||||||
| 1.1 | 1.2 | 3.6 | 0.77 | 2.2863 | 1.07 | 48.53 | 0 | 5 | 7 | 7 | 71.03 | 64.58 | ||
| 0.8 | 1 | 3 | 0.56 | 2.3793 | 1.11 | 59.11 | 2 | 3 | 9 | 12 | 117.80 | 107.85 | ||
| 1 | 1.2 | 3.6 | 0.70 | 2.4783 | 1.16 | 37.64 | 0 | 5 | 7 | 7 | 58.34 | 54.94 | ||
| 0.6 | 1 | 3 | 0.42 | 2.5783 | 1.20 | 41.15 | 2 | 3 | 9 | 12 | 101.87 | 97.99 | ||
| 1.1 | 1.5 | 4.5 | 0.77 | 2.6978 | 1.26 | 17.90 | 0 | 5 | 7 | 7 | 25.26 | 24.50 | ||
| 0.8 | 1.2 | 3.6 | 0.56 | 2.8072 | 1.31 | 26.17 | 1 | 4 | 9 | 10 | 45.55 | 44.44 | ||
| 1 | 1.5 | 4.5 | 0.70 | 2.9793 | 1.39 | 14.05 | 0 | 5 | 7 | 7 | 20.74 | 20.37 | ||
| 0.6 | 1.2 | 3.6 | 0.42 | 3.0730 | 1.43 | 18.46 | 2 | 3 | 9 | 12 | 39.39 | 39.03 | ||
| 0.8 | 1.5 | 4.5 | 0.56 | 3.4490 | 1.61 | 10.30 | 0 | 5 | 7 | 7 | 16.20 | 16.09 | ||
| 0.6 | 1.5 | 4.5 | 0.42 | 3.8152 | 1.78 | 8.55 | 0 | 5 | 7 | 7 | 14.01 | 13.98 |
| Scheme | SH | Combined | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 0.6 | 0.5 | 0.75 | 0.42 | 0.7229 | 0.55 | 20.09 | 1 | 4 | 5 | 8 | 31.10 | 31.00 | ||
| 0.8 | 0.5 | 0.75 | 0.56 | 0.7748 | 0.59 | 23.43 | 1 | 4 | 5 | 8 | 35.06 | 34.94 | ||
| 1 | 0.5 | 0.75 | 0.70 | 0.8916 | 0.68 | 33.77 | 1 | 2 | 5 | 8 | 46.58 | 46.42 | ||
| 1.1 | 0.5 | 0.75 | 0.77 | 0.9831 | 0.75 | 46.23 | 1 | 2 | 5 | 8 | 59.02 | 58.82 | ||
| 0.6 | 0.8 | 1.2 | 0.42 | 1.0940 | 0.84 | 52.88 | 1 | 4 | 5 | 8 | 97.64 | 87.12 | ||
| 0.8 | 0.8 | 1.2 | 0.56 | 1.0957 | 0.84 | 55.47 | 1 | 4 | 5 | 8 | 96.27 | 87.28 | ||
| 1 | 0.8 | 1.2 | 0.70 | 1.1421 | 0.87 | 69.62 | 1 | 2 | 5 | 8 | 108.80 | 99.74 | ||
| 1.1 | 0.8 | 1.2 | 0.77 | 1.1889 | 0.91 | 86.51 | 1 | 2 | 5 | 8 | 124.06 | 114.33 | ||
| 1 | 1 | 1.5 | 0.7 | 1.3091 | 1.00 | 96.70 | 176.58 | 122.79 | ||||||
| 0.8 | 1 | 1.5 | 0.56 | 1.3096 | 1.00 | 84.94 | 1 | 3 | 6 | 8 | 75.49 | 113.21 | ||
| 1.1 | 1 | 1.5 | 0.77 | 1.3260 | 1.01 | 98.12 | 1 | 2 | 7 | 9 | 117.73 | 135.38 | ||
| 0.6 | 1 | 1.5 | 0.42 | 1.3414 | 1.02 | 81.71 | 1 | 3 | 6 | 8 | 65.28 | 115.36 | ||
| 1.1 | 1.2 | 1.8 | 0.77 | 1.4632 | 1.12 | 77.65 | 1 | 2 | 7 | 9 | 60.07 | 117.02 | ||
| 1 | 1.2 | 1.8 | 0.70 | 1.4762 | 1.13 | 77.82 | 1 | 2 | 7 | 9 | 49.34 | 105.01 | ||
| 0.8 | 1.2 | 1.8 | 0.56 | 1.5236 | 1.16 | 73.34 | 1 | 2 | 7 | 9 | 38.52 | 93.48 | ||
| 0.6 | 1.2 | 1.8 | 0.42 | 1.5888 | 1.21 | 63.63 | 1 | 3 | 6 | 8 | 33.31 | 89.78 | ||
| 1.1 | 1.5 | 2.25 | 0.77 | 1.6690 | 1.27 | 46.85 | 1 | 2 | 7 | 9 | 28.03 | 66.36 | ||
| 1 | 1.5 | 2.25 | 0.70 | 1.7267 | 1.32 | 42.50 | 1 | 2 | 7 | 9 | 23.02 | 57.06 | ||
| 0.8 | 1.5 | 2.25 | 0.56 | 1.8445 | 1.41 | 33.58 | 1 | 3 | 6 | 8 | 17.96 | 47.17 | ||
| 0.6 | 1.5 | 2.25 | 0.42 | 1.9598 | 1.50 | 26.71 | 1 | 3 | 6 | 8 | 15.54 | 42.26 |
| Scheme | SH | Combined | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1.1 | 0.5 | 1.5 | 0.99 | 1.0034 | 0.76 | 73.09 | 1 | 5 | 7 | 8 | 118.61 | 307.21 | ||
| 1.1 | 0.8 | 2.4 | 0.99 | 1.0212 | 0.78 | 76.25 | 1 | 5 | 7 | 8 | 121.98 | 341.42 | ||
| 1.1 | 1 | 3 | 0.99 | 1.0332 | 0.78 | 76.81 | 1 | 5 | 7 | 8 | 123.05 | 299.94 | ||
| 1 | 0.5 | 1.5 | 0.90 | 1.0365 | 0.79 | 68.60 | 1 | 3 | 7 | 8 | 109.88 | 307.21 | ||
| 1.1 | 1.2 | 3.6 | 0.99 | 1.0451 | 0.79 | 75.63 | 1 | 5 | 7 | 8 | 123.64 | 234.44 | ||
| 1.1 | 1.5 | 4.5 | 0.99 | 1.0630 | 0.81 | 70.47 | 1 | 5 | 7 | 8 | 124.07 | 166.75 | ||
| 0.8 | 0.5 | 1.5 | 0.72 | 1.1158 | 0.85 | 70.10 | 1 | 2 | 7 | 8 | 108.15 | 279.85 | ||
| 1 | 0.8 | 2.4 | 0.90 | 1.2048 | 0.91 | 100.78 | 1 | 3 | 7 | 8 | 143.59 | 229.34 | ||
| 0.6 | 0.5 | 1.5 | 0.54 | 1.2076 | 0.92 | 82.37 | 1 | 2 | 7 | 8 | 124.94 | 308.88 | ||
| 1 | 1 | 3 | 0.90 | 1.3170 | 1.00 | 159.59 | 156.73 | 121.55 | ||||||
| 1 | 1.2 | 3.6 | 0.90 | 1.4292 | 1.09 | 51.35 | 1 | 3 | 6 | 14 | 72.98 | 64.33 | ||
| 0.8 | 0.8 | 2.4 | 0.72 | 1.5323 | 1.16 | 64.24 | 1 | 3 | 11 | 9 | 186.37 | 150.42 | ||
| 1 | 1.5 | 4.5 | 0.90 | 1.5975 | 1.21 | 25.34 | 1 | 3 | 6 | 14 | 31.65 | 29.98 | ||
| 0.8 | 1 | 3 | 0.72 | 1.8100 | 1.37 | 28.91 | 0 | 3 | 6 | 7 | 64.49 | 60.84 | ||
| 0.6 | 0.8 | 2.4 | 0.54 | 1.8109 | 1.38 | 35.98 | 1 | 3 | 11 | 9 | 128.67 | 119.23 | ||
| 0.8 | 1.2 | 3.6 | 0.72 | 2.0877 | 1.59 | 15.52 | 0 | 3 | 6 | 7 | 29.49 | 28.84 | ||
| 0.6 | 1 | 3 | 0.54 | 2.2131 | 1.68 | 16.13 | 1 | 3 | 7 | 10 | 44.52 | 43.84 | ||
| 0.8 | 1.5 | 4.5 | 0.72 | 2.5042 | 1.90 | 8.34 | 0 | 3 | 6 | 7 | 12.79 | 12.68 | ||
| 0.6 | 1.2 | 3.6 | 0.54 | 2.6153 | 1.99 | 9.19 | 0 | 3 | 6 | 7 | 20.36 | 20.26 | ||
| 0.6 | 1.5 | 45 | 0.54 | 3.2186 | 2.44 | 5.15 | 0 | 3 | 6 | 7 | 8.83 | 8.82 |
| Scheme | SH | Combined | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1.1 | 0.5 | 2 | 0.55 | 1.2988 | 0.49 | 14.14 | 3 | 7 | 10 | 9 | 33.68 | 98.08 | ||
| 1 | 0.5 | 2 | 0.5 | 1.3750 | 0.52 | 14.79 | 3 | 7 | 10 | 9 | 38.62 | 118.01 | ||
| 0.8 | 0.5 | 2 | 0.4 | 1.5200 | 0.58 | 15.56 | 4 | 11 | 15 | 12 | 52.67 | 179.34 | ||
| 0.6 | 0.5 | 2 | 0.3 | 1.6550 | 0.63 | 16.08 | 4 | 11 | 15 | 12 | 199.06 | 295.48 | ||
| 1.1 | 0.8 | 3.2 | 0.55 | 1.9873 | 0.76 | 31.97 | 4 | 11 | 15 | 12 | 52.22 | 151.12 | ||
| 1 | 0.8 | 3.2 | 0.5 | 2.1250 | 0.81 | 35.51 | 4 | 11 | 15 | 12 | 64.64 | 188.76 | ||
| 0.8 | 0.8 | 3.2 | 0.4 | 2.3840 | 0.91 | 43.49 | 4 | 11 | 15 | 12 | 106.26 | 293.53 | ||
| 1.1 | 1 | 4 | 0.55 | 2.4463 | 0.93 | 78.41 | 4 | 11 | 15 | 12 | 58.74 | 105.87 | ||
| 0.6 | 0.8 | 3.2 | 0.3 | 2.6210 | 1.00 | 52.64 | 4 | 11 | 15 | 12 | 199.06 | 428.80 | ||
| 1 | 1 | 4 | 0.5 | 2.6250 | 1.00 | 74.89 | 74.41 | 116.96 | ||||||
| 1.1 | 1.2 | 4.8 | 0.55 | 2.9053 | 1.11 | 37.28 | 0 | 6 | 10 | 9 | 31.23 | 53.02 | ||
| 0.8 | 1 | 4 | 0.4 | 2.9600 | 1.13 | 72.66 | 0 | 4 | 9 | 7 | 65.01 | 133.62 | ||
| 1 | 1.2 | 4.8 | 0.5 | 3.1250 | 1.19 | 32.10 | 0 | 6 | 10 | 9 | 28.67 | 52.96 | ||
| 0.6 | 1 | 4 | 0.3 | 3.2650 | 1.24 | 54.41 | 0 | 4 | 9 | 7 | 58.15 | 139.62 | ||
| 0.8 | 1.2 | 4.8 | 0.4 | 3.5360 | 1.35 | 24.96 | 0 | 6 | 10 | 9 | 24.88 | 51.20 | ||
| 1.1 | 1.5 | 6 | 0.55 | 3.5938 | 1.37 | 13.01 | 0 | 6 | 10 | 9 | 11.41 | 19.08 | ||
| 1 | 1.5 | 6 | 0.5 | 3.8750 | 1.48 | 11.41 | 0 | 6 | 10 | 9 | 10.47 | 18.03 | ||
| 0.6 | 1.2 | 4.8 | 0.3 | 3.9090 | 1.49 | 19.71 | 0 | 4 | 9 | 7 | 22.26 | 48.20 | ||
| 0.8 | 1.5 | 6 | 0.4 | 4.4000 | 1.68 | 9.16 | 0 | 6 | 10 | 9 | 9.09 | 16.19 | ||
| 0.6 | 1.5 | 6 | 0.3 | 4.8750 | 1.86 | 7.69 | 0 | 6 | 10 | 9 | 8.13 | 14.70 |
| Scheme | SH | Combined | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1.1 | 0.5 | 1 | 0.88 | 0.1200 | 0.30 | 30.50 | 1 | 4 | 6 | 21 | 29.86 | 98.08 | ||
| 1.1 | 0.8 | 1.6 | 0.88 | 0.1920 | 0.48 | 42.33 | 1 | 4 | 6 | 21 | 36.83 | 151.12 | ||
| 1 | 0.5 | 1 | 0.8 | 0.2000 | 0.50 | 40.23 | 1 | 4 | 6 | 21 | 52.16 | 118.01 | ||
| 1.1 | 1 | 2 | 0.88 | 0.2400 | 0.60 | 50.72 | 1 | 4 | 6 | 21 | 40.21 | 105.87 | ||
| 1.1 | 1.2 | 2.4 | 0.88 | 0.2880 | 0.72 | 54.11 | 0 | 2 | 7 | 18 | 42.69 | 53.02 | ||
| 1 | 0.8 | 1.6 | 0.8 | 0.3200 | 0.80 | 70.27 | 3 | 4 | 8 | 47 | 78.81 | 188.76 | ||
| 0.8 | 0.5 | 1 | 0.64 | 0.3600 | 0.90 | 55.64 | 3 | 4 | 8 | 47 | 206.93 | 179.34 | ||
| 1.1 | 1.5 | 3 | 0.88 | 0.3600 | 0.90 | 45.33 | 0 | 2 | 5 | 22 | 45.14 | 19.08 | ||
| 1 | 1 | 2 | 0.8 | 0.4000 | 1.00 | 94.96 | 93.99 | 116.96 | ||||||
| 1 | 1.2 | 2.4 | 0.8 | 0.4800 | 1.20 | 63.72 | 0 | 2 | 5 | 22 | 52.15 | 52.96 | ||
| 0.6 | 0.5 | 1 | 0.48 | 0.5200 | 1.30 | 60.16 | 3 | 4 | 8 | 47 | 525.45 | 295.48 | ||
| 0.8 | 0.8 | 1.6 | 0.64 | 0.5760 | 1.44 | 100.18 | 3 | 4 | 8 | 47 | 117.29 | 293.53 | ||
| 1 | 1.5 | 3 | 0.8 | 0.6000 | 1.50 | 35.55 | 0 | 2 | 5 | 22 | 27.07 | 18.03 | ||
| 0.8 | 1 | 2 | 0.64 | 0.7200 | 1.80 | 51.68 | 0 | 2 | 5 | 22 | 52.76 | 133.62 | ||
| 0.6 | 0.8 | 1.6 | 0.48 | 0.8320 | 2.08 | 55.88 | 0 | 2 | 5 | 22 | 81.20 | 428.80 | ||
| 0.8 | 1.2 | 2.4 | 0.64 | 0.8640 | 2.16 | 29.68 | 0 | 2 | 5 | 22 | 28.97 | 51.20 | ||
| 0.6 | 1 | 2 | 0.48 | 1.0400 | 2.60 | 26.71 | 0 | 2 | 5 | 22 | 36.52 | 139.62 | ||
| 0.8 | 1.5 | 3 | 0.64 | 1.0800 | 2.70 | 16.55 | 0 | 2 | 5 | 22 | 15.04 | 16.19 | ||
| 0.6 | 1.2 | 2.4 | 0.48 | 1.2480 | 3.12 | 16.01 | 0 | 2 | 5 | 22 | 20.06 | 48.20 | ||
| 0.6 | 1.5 | 3 | 0.48 | 1.5600 | 3.90 | 9.49 | 0 | 2 | 5 | 22 | 10.41 | 14.70 |
| Scheme | SH | Combined | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1.1 | 0.5 | 3 | 0.99 | 0.030 | 0.05 | 25.84 | 0 | 1 | 14 | 23 | 25.84 | 30.94 | ||
| 1.1 | 0.8 | 4.8 | 0.99 | 0.048 | 0.08 | 25.98 | 0 | 1 | 14 | 23 | 25.98 | 31.04 | ||
| 1.1 | 1 | 6 | 0.99 | 0.060 | 0.10 | 25.99 | 0 | 1 | 14 | 23 | 26.00 | 30.75 | ||
| 1.1 | 1.2 | 7.2 | 0.99 | 0.072 | 0.12 | 25.95 | 0 | 1 | 14 | 23 | 26.00 | 30.11 | ||
| 1.1 | 1.5 | 9 | 0.99 | 0.090 | 0.15 | 25.73 | 0 | 1 | 14 | 23 | 26.01 | 28.56 | ||
| 1 | 0.5 | 3 | 0.9 | 0.300 | 0.50 | 38.21 | 5 | 12 | 15 | 33 | 94.07 | 144.80 | ||
| 1 | 0.8 | 4.8 | 0.9 | 0.480 | 0.80 | 63.51 | 6 | 9 | 15 | 40 | 101.32 | 136.47 | ||
| 1 | 1 | 6 | 0.9 | 0.600 | 1.00 | 119.16 | 102.37 | 95.51 | ||||||
| 1 | 1.2 | 7.2 | 0.9 | 0.720 | 1.20 | 47.29 | 1 | 6 | 9 | 49 | 52.53 | 57.09 | ||
| 0.8 | 0.5 | 3 | 0.72 | 0.840 | 1.40 | 23.51 | 0 | 1 | 13 | 45 | 3239.43 | 6913.29 | ||
| 1 | 1.5 | 9 | 0.9 | 0.900 | 1.50 | 23.11 | 1 | 6 | 9 | 49 | 24.24 | 28.11 | ||
| 0.8 | 0.8 | 4.8 | 0.72 | 1.344 | 2.24 | 17.64 | 0 | 1 | 13 | 45 | 142.06 | 337.92 | ||
| 0.6 | 0.5 | 3 | 0.54 | 1.380 | 2.30 | 9.58 | 0 | 1 | 13 | 45 | 1971.82 | 7431.91 | ||
| 0.8 | 1 | 6 | 0.72 | 1.680 | 2.80 | 16.61 | 0 | 1 | 13 | 45 | 42.56 | 83.51 | ||
| 0.8 | 1.2 | 7.2 | 0.72 | 2.016 | 3.36 | 15.32 | 1 | 6 | 9 | 49 | 18.76 | 31.48 | ||
| 0.6 | 0.8 | 4.8 | 0.54 | 2.208 | 3.68 | 7.39 | 0 | 1 | 13 | 45 | 86.47 | 208.69 | ||
| 0.8 | 1.5 | 9 | 0.72 | 2.520 | 4.20 | 7.91 | 1 | 6 | 9 | 49 | 8.66 | 12.14 | ||
| 0.6 | 1 | 6 | 0.54 | 2.760 | 4.60 | 7.03 | 0 | 1 | 13 | 45 | 25.90 | 51.01 | ||
| 0.6 | 1.2 | 7.2 | 0.54 | 3.312 | 5.52 | 6.80 | 0 | 1 | 13 | 45 | 11.42 | 19.18 | ||
| 0.6 | 1.5 | 9 | 0.54 | 4.140 | 6.90 | 4.58 | 1 | 6 | 9 | 49 | 5.27 | 7.39 |
| Scenario | |||||||
|---|---|---|---|---|---|---|---|
| 1 | 164.18 204.85 1, 4, 7, 14 | 154.79 202.87 1, 4, 9, 13 | 260.01 204.20 0, 4, 9, 10 | 255.96 203.76 0, 4, 10, 10 | 257.17 198.37 0, 3, 7, 10 | 152.35 215.46 1, 2, 7, 14 | 325.06 214.97 0, 2, 8, 9 |
| 2 | 132.30 204.85 1, 4, 7, 14 | 121.59 202.87 1, 4, 9, 13 | 310.54 204.20 0, 4, 9, 10 | 301.20 203.76 0, 4, 10, 10 | 309.93 198.37 0, 3, 7, 10 | 107.60 215.46 1, 2, 7, 14 | 398.30 214.97 0, 2, 8, 9 |
| Scenario 1 | 17.782 20.084 1, 2, 4, 8 | 23.110 20.184 3, 4, 6, 15 | 23.108 20.184 3, 4, 6, 15 | 23.108 20.184 3, 4, 6, 15 | 20.044 1, 2, 3, 11 | 20.178 1, 2, 3, 11 | 20.188 1, 2, 3, 11 |
| Scenario 2 | 14.286 20.084 1, 2, 4, 8 | 25.995 20.184 3, 4, 6, 15 | 25.973 20.184 3, 4, 6, 15 | 25.971 20.184 3, 4, 6, 15 | 20.044 1, 2, 3, 11 | 20.178 1, 2, 3, 11 | 20.188 1, 2, 3, 11 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mamzeridou, E.; Rakitzis, A.C. A Combined Runs Rules Scheme for Monitoring General Inflated Poisson Processes. Mathematics 2023, 11, 4671. https://doi.org/10.3390/math11224671
Mamzeridou E, Rakitzis AC. A Combined Runs Rules Scheme for Monitoring General Inflated Poisson Processes. Mathematics. 2023; 11(22):4671. https://doi.org/10.3390/math11224671
Chicago/Turabian StyleMamzeridou, Eftychia, and Athanasios C. Rakitzis. 2023. "A Combined Runs Rules Scheme for Monitoring General Inflated Poisson Processes" Mathematics 11, no. 22: 4671. https://doi.org/10.3390/math11224671